 電子發(fā)燒友App
電子發(fā)燒友App


多道脈沖幅度分析器不僅能自動獲取能譜數(shù)據(jù),而且一次測量就能得到整個能譜,因此可大大減少數(shù)據(jù)采集時間,與此同時,其測量精度也顯著提高。自從20世紀(jì)50年代以來,多道脈沖幅度分析器發(fā)展迅速,現(xiàn)在已成為獲取核能譜數(shù)據(jù)的通用儀器。
多道分析任務(wù)是將被測量的脈沖幅度范圍平均分成2n個幅度間隔,然后測量幅度在每一個幅度間隔內(nèi)的輸入脈沖個數(shù),最后得到輸入信號的脈沖幅度分布曲線。其測量采用的是計算機(jī)技術(shù)中的A/D模數(shù)變換及數(shù)據(jù)存儲技術(shù)。
在計算機(jī)的存儲器中開辟一個數(shù)據(jù)緩沖區(qū),數(shù)據(jù)緩沖區(qū)內(nèi)有2n個計數(shù)器,每一個脈沖幅度間隔在數(shù)據(jù)緩沖區(qū)內(nèi)部有一個對應(yīng)的計數(shù)器。多道脈沖幅度分析時,可在微處理器的控制下,將被分析的脈沖信號首先送往模數(shù)變換器,經(jīng)A/D變換形成一個代表脈沖幅度的數(shù)字量(道址)。然后用微處理器將該數(shù)字量變換成所對應(yīng)的計數(shù)器地址。并使該地址對應(yīng)的計數(shù)器內(nèi)容加一(反映該道計數(shù)加一)。這樣,經(jīng)過一段時間的測量,存儲器內(nèi)計數(shù)器緩沖中各計數(shù)器計數(shù)的多少就可反映輸入脈沖的幅度分布。
1 多道脈沖幅度分析器結(jié)構(gòu)
一臺完整的核地球物理儀器通常可分為兩部分:核輻射探測器和嵌入式系統(tǒng)。而多道脈沖幅度分析器是嵌入式系統(tǒng)的核心部分。多道脈沖幅度分析器一方面采集來自放大器的信號并進(jìn)行模數(shù)轉(zhuǎn)換,同時存儲轉(zhuǎn)換結(jié)果;另一方面將存儲的轉(zhuǎn)換結(jié)果進(jìn)行數(shù)據(jù)分析,并直接顯示譜線,或通過計算機(jī)接口送給計算機(jī)進(jìn)行數(shù)據(jù)處理和譜線顯示。
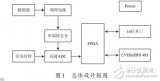
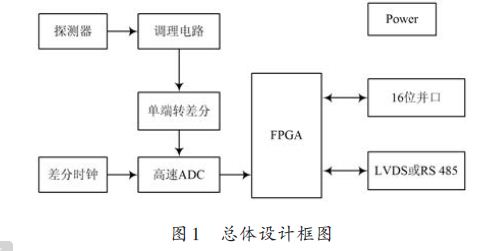
本文介紹的多道脈沖幅度分析器的設(shè)計結(jié)構(gòu)框圖如圖1所示。脈沖信號在通過甄別電路和控制電路時,甄別電路給出脈沖的過峰信息,并啟動A/D轉(zhuǎn)換。A/D轉(zhuǎn)換電路則可對脈沖信號峰值幅度進(jìn)行模數(shù)轉(zhuǎn)換,并將轉(zhuǎn)換結(jié)果存儲在片上Flash中,然后由微控制器進(jìn)行相應(yīng)的數(shù)據(jù)處理。

2 多道脈沖幅度分析器硬件設(shè)計
2.1 脈沖線性主放大器
多道脈沖幅度分析器由甄別電路、控制電路、采樣保持電路、模數(shù)轉(zhuǎn)換電路、ARM嵌入式系統(tǒng)組成,其控制核心為嵌入式系統(tǒng)。它的基本功能是按輸入脈沖的幅度分類計數(shù)。多道脈沖幅度分析器將能夠分析的脈沖幅度范圍分成多個幅度間隔,幅度間隔的個數(shù)就是脈沖幅度分析器的道數(shù),幅度間隔的寬度就是脈沖幅度分析器的道寬。道數(shù)越多,幅度分布分析的越精細(xì),各個道的計數(shù)相應(yīng)減少,需要測量的時間就要加長,硬件電路也隨之復(fù)雜。因此,不應(yīng)盲目追求道數(shù)。通常要求,在幅度峰的半寬度范圍內(nèi)應(yīng)有5~10道。對于采用NaI探測器的多道能譜儀,由于它的能量分辨率比較差,往往128道至256道就能滿足測量要求。而對于半導(dǎo)體探測器,則需要1024~8196道。本文使用半導(dǎo)體探測器并采用12位AD轉(zhuǎn)換器,共有4096道,但采用并道的方式來顯示1024道。
主放大器應(yīng)放在前置放大電路和甄別電路之間,但需要增益調(diào)節(jié)來補(bǔ)償核輻射探測器輸出脈沖幅度的變化。由于探測器輸出的脈沖信號幅度比較小(為幾十毫伏至幾百毫伏),脈沖寬度比較窄,因此。為了能進(jìn)行信號幅度分析,實現(xiàn)能譜測量,通常需要用脈沖線性放大器將脈沖信號進(jìn)行幅度的線性放大與脈沖成形。針對脈沖特點(diǎn),要求放大器具有以下技術(shù)指標(biāo)特性:
首先是放大倍數(shù)應(yīng)按放大器的輸入脈沖幅度和所要求的輸出幅度來確定。因為前放輸出的電脈沖信號幅度一般可以調(diào)至幾百毫伏左右,而放大器輸出脈沖幅度在1~5V范圍內(nèi),所以其放大倍數(shù)應(yīng)在10倍左右,考慮到前置放大器輸出的信號幅度有差異,其放大倍數(shù)應(yīng)可調(diào)試。
其次是放大器的頻帶寬度。由于前放輸出的脈沖寬度會受有關(guān)電路影響,一般為幾個μs,因此,要求放大器的頻帶寬度為1~2MHz。
第三是放大器的噪聲。考慮到來自前放的信號幅度比較小,要求選用的放大器的輸入噪聲應(yīng)盡可能的小。一般地,選用低噪聲的運(yùn)算放大器組件可以有效減少電路內(nèi)部固有的噪聲。
另外,諸如放大器的輸入阻抗、抗計數(shù)過載、放大器的穩(wěn)定性、功耗等,在電路設(shè)計和調(diào)試時也應(yīng)予以考慮。由于α脈沖信號通過整形后大概有1~2個微秒的脈沖寬,γ脈沖信號通過整形后大概有3~5個微秒的脈沖寬,所以,在選用運(yùn)算放大器時,要考慮到運(yùn)放的轉(zhuǎn)換速度。本系統(tǒng)的運(yùn)算放大器選用CA3140,該器件具有輸入阻抗高、噪聲低、功耗小、溫漂小等特點(diǎn)。
2.2 峰值檢測電路
峰值檢測電路由甄別電路和控制電路兩部分構(gòu)成,甄別電路的作用是檢測信號時序,控制電路則根據(jù)甄別電路的時序?qū)?a href="http://www.xsypw.cn/analog/" target="_blank">模擬開關(guān)、ADC轉(zhuǎn)換進(jìn)行控制。控制電路必須跟甄別電路的時序嚴(yán)格結(jié)合在一起,才能完成峰值檢測任務(wù)。
由于核輻射探測器輸出的脈沖信號幅度和入射粒子的能量成正比,因此,測量這些脈沖的幅度,就可以知道輻射的能量。可見,脈沖幅度測量技術(shù)在核能譜測量中是一個重要的問題。甄別電路需要解決三個與信號相關(guān)的信息:一是超過閾值信號的信息;二是過峰時間信息,即啟動ADC轉(zhuǎn)換的時間信息;三是ADC完成轉(zhuǎn)換的時間信息。甄別電路中也存在三個關(guān)鍵問題,研究中要予以注意:
首先,由于放大器輸出的α和γ射線脈沖寬度比較窄(約1μs到5μs),而本系統(tǒng)選用的ADC轉(zhuǎn)換速度為10μs,所以,要對脈沖信號峰值進(jìn)行峰值展寬。采樣保持電路要求采樣速度快,以使保持時間能達(dá)到ADC采樣時間指標(biāo)。
其次,由于脈沖信號的隨機(jī)性,為了防止信號來的過密而引起漏計,本系統(tǒng)采用10μs轉(zhuǎn)換速度的ADC,所以,從理論上分析,如果兩個信號相隔10μs內(nèi),則會引起漏計。而由于CPU處理速度等問題的存在,實際上,這個時間間隔可能長3~10倍,即在30~100μs之間(根據(jù)CPU處理速度及代碼量而定),甚至更多,也就是說,實際信號出現(xiàn)這種情況的幾率很少,所以,可以忽略這個問題。
另外,還要解決信號過密而引起的幅度信號錯誤紀(jì)錄,而高能區(qū)的信號也可能被誤計為低能區(qū)的信號,容易引起低能計數(shù)偏大而高能計數(shù)偏小的問題。
圖2所示是甄別電路和控制電路的原理圖。甄別電路的主要功能是完成過峰檢測和去除信號噪聲,可通過設(shè)定閉值將信號中能量小于閥值的噪聲去。峰值通過后,提供信息給控制電路;控制電路的主要功能是完成對A/D讀入/轉(zhuǎn)換狀態(tài)的控制。控制電路可由74HC74觸發(fā)器構(gòu)成。

甄別和控制電路具體工作過程是,先由嵌入式微處理器控制中心給控制電路發(fā)出信號,以使控制電路處于工作狀態(tài),當(dāng)脈沖信號到達(dá)多道脈沖幅度分析器后,由甄別電路進(jìn)行甄別,并在過峰值后,將峰值通過的時間信息提供給控制電路;此后由控制電路啟動模數(shù)轉(zhuǎn)換,數(shù)模轉(zhuǎn)換完畢,再由嵌入式微處理器控制中心產(chǎn)生中斷,同時使控制電路停止工作,同時進(jìn)行相應(yīng)的數(shù)據(jù)處理;中斷完畢,再由單片機(jī)發(fā)信號使控制電路重新處于工作狀態(tài)。
采樣開始時,先由ARM通過控制74HC74來啟動A/D,然后,使U2A的RD和U2B的RD及SD端輸出高電平,控制電路處于接收信號狀態(tài)。當(dāng)信號上升沿的能量低于設(shè)定的閉值電壓時,U2A的CLK端為低電壓,此時,U2A的RD和SD端均為高電平,輸出端5腳保持原來的低電平不變。當(dāng)信號上升沿的能量高于設(shè)定的閉壓值時,U2A的CLK端為高電壓,輸出端5腳輸出高電平,啟動U2B。當(dāng)脈沖沒有達(dá)到峰值時,比較器U1B的同相輸入端電壓低于反相輸入端電壓,6端輸出低電壓,當(dāng)過峰后,6端輸出高電平,R/C輸出低電平以啟動A/D轉(zhuǎn)換。轉(zhuǎn)換完畢后,由ARM重新控制A/D進(jìn)行下一個脈沖信號的采集。甄別電路和控制電路的工作流程如圖3所示。

2.3 模數(shù)轉(zhuǎn)換電路
模數(shù)轉(zhuǎn)換電路的作用是將模擬量轉(zhuǎn)換成數(shù)字量,并將轉(zhuǎn)換結(jié)果反饋給微控制器。多道脈沖幅度分析器主要用于快速、高精度地對輸入的核脈沖信號進(jìn)行采樣,并將脈沖的幅度值轉(zhuǎn)換成微控制器所能夠處理的數(shù)字量。模數(shù)轉(zhuǎn)換電路作為多道脈沖幅度分析器的關(guān)鍵部件,其性能的好壞直接影響整個系統(tǒng)的能量分辨率和轉(zhuǎn)換精度等參數(shù)。綜合對多道脈沖幅度分析器的ADC芯片的主要性能(如轉(zhuǎn)換速度,功耗,轉(zhuǎn)換精度)等考慮,本系統(tǒng)選用AD公司的AD7994,并在實際工作中采用“并道”的方法,每4道并作l道,則道寬非線性即可降低至原來的1/4。這種方法可降低由于ADC本身造成的非線性誤差。其具體電路設(shè)計見圖4所示。

2.4 ARM微控制器外圍電路設(shè)計
LPC2134是具有全雙工通信能力的串行外設(shè)接口芯片(SPI)。一個SPI總線可以連接多個從器件和多個主器件,但是在同一時刻,則只允許有一個主機(jī)操作總線。本系統(tǒng)利用SPI接口來擴(kuò)展Flash存儲器。Flash存儲器選用ATMEL公司的AT45DB041。ARM與串行Flash芯片AT45DB041的連接電路如圖5所示。

本系統(tǒng)中,ARM工作在主機(jī)方式。由于ARM工作在主機(jī)方式時,若SSEL引腳為低電平,則將禁止SPIO模塊工作。所以,為了系統(tǒng)可靠的工作,雖然這里該引腳未用,仍需將它通過上拉電阻接在電源上。串行Flash芯片AT45DB041的CS片選端由ARM控制。WP為寫保護(hù)端,若使能,則存儲器的前256頁將不能擦除重寫。由于本系統(tǒng)不需要此功能,因此,此腳直接接高電平。由于微處理器的存儲容量有限且運(yùn)算功能不強(qiáng),故在對數(shù)據(jù)進(jìn)行較復(fù)雜的處理時,往往需要借助計算機(jī)系統(tǒng)。因為串行通訊具有所用傳輸線少,適合于遠(yuǎn)距離傳輸?shù)忍攸c(diǎn),所以本系統(tǒng)采用串口來連接計算機(jī)和微控制器。串口通信的硬件電路如圖6所示。串口信號TXD和RXD直接和LPC2134的串行口相連接。

3 多道脈沖幅度分析器相關(guān)軟件設(shè)計
ARM微處理器軟件可采用前/后臺系統(tǒng)(foreground/background)或超循環(huán)系統(tǒng)(super-loops)設(shè)計。應(yīng)用程序是一個無限循環(huán),循環(huán)中調(diào)用相應(yīng)的函數(shù)可完成相應(yīng)的功能,這部分可以看成后臺行為(background)。中斷服務(wù)程序可處理異步事件、這部分可以看成前臺行為。后臺也可以叫做任務(wù)級,前臺也叫做中斷級。時間相關(guān)性很強(qiáng)的關(guān)鍵操作一定是靠中斷服務(wù)來保證的。因為中斷服務(wù)提供的信息,要等到后臺程序運(yùn)行到可以處理這個信息時,才能得到處理。這種軟件系統(tǒng)在處理信息的及時性上,比實際可以做到的要差。處理信息的及時性,稱作任務(wù)級響應(yīng)時間。最壞情況下的任務(wù)級響應(yīng)時間取決于整個循環(huán)的執(zhí)行時間。因為循環(huán)的執(zhí)行時間不是常數(shù),程序經(jīng)過某一特定部分的準(zhǔn)確時間是確定的。進(jìn)而,如果程序修改了,循環(huán)的時序也會受到影響。程序在進(jìn)行初始化后,將進(jìn)入超級循環(huán)等待中斷,中斷到來先保護(hù)現(xiàn)場再轉(zhuǎn)到中斷服務(wù)程序,處理完畢后恢復(fù)現(xiàn)場,再返回超級循環(huán)并繼續(xù)等待中斷。可見中斷處理是程序中比較重要的任務(wù)。
3.1 主函數(shù)程序設(shè)計流程
整個應(yīng)用系統(tǒng)軟件程序可采用模塊化設(shè)計方法,包括C語言和匯編語言兩在模塊。其主程序流程圖如圖7所示。

3.2 A/D轉(zhuǎn)換中斷服務(wù)程序
A/D轉(zhuǎn)換完畢后,可由AD7994的BUSY端向ARM申請中斷,ARM開始讀取來自A/D轉(zhuǎn)換的數(shù)據(jù)并保存。其程序流程如圖8所示。

AD7994是4通道12位ADC,為了能夠快速處理A/D中斷服務(wù)程序,本系統(tǒng)將A/D中斷設(shè)置為快速中斷。
3. 3 串口通信軟件設(shè)計
本系統(tǒng)中的串口中斷程序流程圖如圖9所示。

4 仿真調(diào)試
在PROTEUS軟件上進(jìn)行仿真,改變不同的電路參數(shù),可以觀察波形的變化。
利用函數(shù)發(fā)生器可產(chǎn)生一個矩形波信號,然后運(yùn)行仿真程序,以直接讀出各波形。改變電容Cll的值,可以改變輸出波形的幅度。然后調(diào)整不同的輸入信號進(jìn)行測試,并記錄輸出波形的幅度以及波形。波形幅度數(shù)據(jù)如表l所列,其波形仿真圖10所示。


由圖可見,當(dāng)C11的值小于160 pF或大于1.5nF的時候,波形開始失真。
5 結(jié)束語
本文所設(shè)計的硬件電路已經(jīng)通過了軟件調(diào)試和仿真,可以達(dá)到預(yù)期的效果。積分電容器的電容值過大過小都不行,在PROTEUS上選擇不同的電容值有較大的優(yōu)勢。由于CA3140的放大倍數(shù)等于某時候的最高信號頻率(為4.5 MHz),故在輸入信號頻率較高的時候,CA3140的放大倍數(shù)將不能接近1,而這會影響 最后的結(jié)果。所以,為了在高頻輸入時,系統(tǒng)也能正常工作,可以把CA3140替換成高頻特性比較好的LM6161,這樣可以提高系統(tǒng)的高頻特性。













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論