 電子發燒友App
電子發燒友App


汽車行駛記錄儀俗稱汽車黑匣子,是一種能夠對車輛行駛速度、時間、里程以及其他狀態信息進行記錄的電子裝置。本文設計的基于TI 公司的TMS470R1A256 汽車行駛記錄儀可以記錄汽車行駛的狀態,并對通過汽車行駛狀況的記錄分析、鑒定道路交通事故,提高交通管理執法水平和運輸管理水平,保障車輛運行安全具有重要作用。文中主要給出了系統的硬件設計及主程序的軟件設計。本文在傳統記錄儀的基礎上,增加GPRS , GPS及USB 主機等功能,實現對正在行駛的汽車進行遠程監控、衛星導航等功能。
1 "黑匣子"的分類
由于各研制生產廠家的出發點不同,因而產品的類型不同,產品結構形式也不盡相同。目前市場上的記錄儀己形成了一個種類繁多、性能不一的產品格局。汽車行駛記錄儀根據其功能不同可以分為單一型、事故型、管理型、綜合管理型和3G型。
3G型是從軟件、硬件和系統功能上進行了優化設計,以綜合管理為主要目地而開發的新一代汽車行駛記錄儀。主要特征是多通道數據采集處理,全程連續記錄,大容量存儲卡和強大的綜合管理軟件系統,實現資源共享。此類型記錄儀利用多通道數據采集處理平臺、GPS 衛星定位儀、大容量數據存儲卡、日趨成熟的地理信息系統和后臺綜合管理平臺軟件等強有力的現代化技術手段,重點針對營運和特種車輛的綜合化管理目標,來完成車輛綜合化管理進程。可通過在微機軟件介面上重放的全程連續記錄曲線和各開關傳感器的連續狀態,對車輛的營運、安全、質量等綜合指標進行強有力的全程監控,根據需求打印統計圖表,并采用動態分析方式,為駕駛員的安全駕駛提供極高價值的參考。
本文介紹的就是基于ARM 的3G型汽車"黑匣子"的設計。
2 系統總體設計
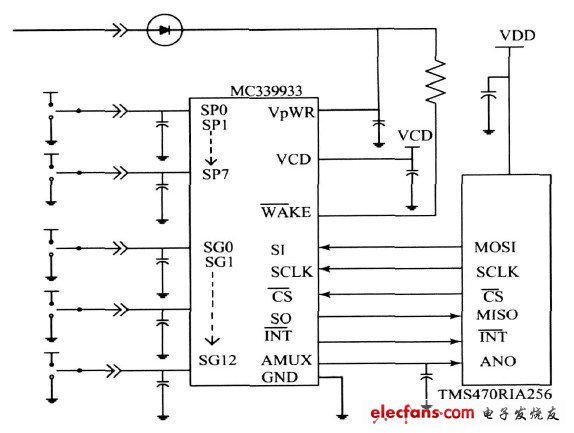
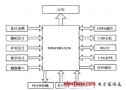
本系統包括記錄儀車載端主機和監控軟件組成。其中主機采用TI 公司32 位的RISC 微處理器TMS470R1A256 作為主控制器,包括基本記錄模塊、顯示模塊、打印機模塊、GPS 模塊、GPRS 模塊、數據通訊模塊。系統整體設計框圖如圖1 所示。

?
圖1 系統原理框圖
系統通過TMS470R1A256 對外部模擬信號輸入、數字信號輸入以及開關量輸入三種信號分別進行采集。需要保存的數據經過處理后存儲于內部大容量存儲器中,實時數據(如實時車速、實時時問) 及報警信號等可通過顯示面板輸出顯示。GPS模塊對經緯度,速度進行測量,通過GPRS 實現遠程監控和實時跟蹤。
3 系統硬件設計
3. 1 TMS470R1A256.
TMS470R1A256 是TI TMS470R1 x 通用16/32 位精簡指令( RISC) 微控制器的系列產品。
TMS470R1A256 主要包含以下資源: 256 KBFlash、12 KB SRAM、零管腳鎖相環(ZPLL) 時鐘模塊、模擬看門狗(AWD) 定時器、實時中斷(RTI) 、串行外圍接口( SPI) 、串行通信接口( SCIx) 、標準CAN 控制器( SCC) 、二類串行接口(C2Sib) 、外部時鐘分頻器( ECP) ,10 位多緩沖ADC(MibADC) 、16 輸入通道、高端定時器( HET) ,多達49 個I/ O口和一個只輸入口。
TMS470R1A256 的Flash 存儲器是非易失性的、電可擦除的,可編程的存儲器,并具有32 位寬的數據總線接口。Flash 操作以系統時鐘頻率進行, 可達24MHz.在管道模式下, 頻率可達48 MHz.
SCI 是全雙工的、串行I/ O 接口,實現了CPU與采用標準不歸零制(NRZ) 格式的外圍設備間的異步通訊。SCC 利用串行的、多主機通信協議實現了高效的分布式實時控制和高達1Mbit/ s 的穩定通訊。SCC 是高噪聲和惡劣環境中,要求可靠串行通信和多道通訊應用的理想選擇。C2Sib 使TMS470R1A256 可以在遵循SAEJ I850 協議標準的二類網絡中發送與接收信息。
3. 2 TMS470R1A256 與MC33993 之間的通信
美國MO TOROLA 公司推出的可編程多路開關檢測接口集成電路MC33993 可檢測多達22 路的開關量輸入信號,并可將檢測到的多路開關狀態(三態) 信號通過該芯片的SPI 口傳送給MCU .此外,該器件還具有22 路模擬多路開關功能,可用以讀取多路模擬輸入信號。該模擬輸入信號經緩沖器可由模擬多路開關輸出以供MCU 讀取。并且MC33993 可使得包括MCU 在內的整個系統能在一個較低的靜態電流下工作這對遠程監控之類的系統非常重要,因為對它們而言,電流損耗是重要的設計考慮。因此,本設計選用MC33993 作為多路開關檢測接口電路。
系統中MC33993 采用SPI 與MCU 實現硬件連接,如圖2 所示:當外部有開關量輸入,狀態發生改變時, MC33993 會發出中斷信號IN T 給TMS470R1A256 , TMS470R1A256 響應中斷讀取開關量輸入狀態,從而提高MCU 的工作效率。
?
圖2 MC33993 與TMS470R1A256 的硬件連接。
3. 3 TMS470R1A256 與FM24L256 之間的通信
在汽車行駛記錄儀行業中,數據安全保存是最重要的。隨著記錄儀的發展,保存的數據量越來越大,這就需要大容量的存儲器,而大容量的EEPROM 指標不是很高,尤其是擦寫次數和速度影響電能表自身的質量。FM24L256 是由RAMTRON公司研制的新型存儲器,它的核心技術是鐵電晶體材料,擁有隨即存取記憶體和非易失性存貯產品的特性。FM24L256 和A T24C256 容量等同,總線結構兼容, 但FM24L256 的性能指標遠大于A T24C256 .
FM24L256 的通訊方式是雙向兩線協議,腳位少,占用線路板空間小。圖3 描述了FM24L256 與MCU 硬件連接方式。

?
圖3 FM24L256 與TMS470RIA256 的硬件連接
3. 4 TMS470R1A256 與SL811HS 之間的通信
本系統中USB 的主機通過主機控制器與USB設備進行數據傳輸。USB 主機應當具有: 檢測USB 設備的插拔;管理USB 主機與USB 設備之間的控制流;管理USB 主機與設備間的數據流和收集USB 主機的狀態等功能。
SL811HS 是CYPRESS 公司生產的、可支持全速數據傳輸的USB 控制芯片,且內含USB 主從控制器,支持全速、低速數據傳輸,并能自動識別低速或全速設備。SL811HS 所提供的接口遵從USB1. 1 標準,可與TMS470R1A256 微處理器相連。SL811HS 的數據接口與微處理器進行接口可提供8 位數據I/ O 或雙向DMA 通道,并能以從機操作方式支持DMA 數據傳輸。SL811HS 內部有一個256 字節的RAM ,可用做控制寄存器或數據緩沖器。SL811HS 與TMS470R1A256 的硬件連接方式如圖4 所示。

?
圖4 SL811HS 與TMS470R1A256 的硬件連接。
3. 5 TMS470R1A256 與HOLUXGR285 之間的通信
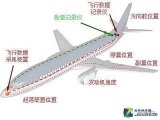
HOLUXGR285 智能型衛星接收模組,采用美國瑟孚公司所設計的第二代衛星定位接收芯片,是一個完整的衛星定位接收器。具備全方位功能,能滿足專業定位的嚴格要求與個人消費需求。適用范圍從汽車導航、保安系統、地圖制作等。
HOLUXGR285 通過RS2232 , TTL 與其它電子設備溝通,并以內建充電電池,存貯衛星資料。
其耗電量低,且能同時追蹤12 顆定位衛星的訊號,每0. 1 秒接收一次,每秒更新一次定位信息。
HOLUXGR285 與TMS470R1A256 均為3.
3V 供電,故無需電平轉換便可通過串行通訊口實現數據交換。硬件連接如圖5 所示。

?
圖5 HOLUXGR285 與TMS470R1A256 的硬件連接
3. 6 TMS470R1A256 與Benq M22 之間的通信
Benq M22 是一款內嵌TCP/ IP 協議棧,支持GSM/ GPRS CLASS4 , 可工作在EGSM900MHz ,DCS 1800MHz ,PCS 1900MHz ,可以支持數據業務的透明和非透明傳輸。從封裝上來說,M22 使用連接座式接口,模塊上自帶天線MMCX 接頭。由于支持GPRS 甚至擁有嵌入式的TCP/ IP ,可以用于實時性要求較高,數據量相對較大,傳輸速度相對較快的汽車行駛記錄儀中。
Benq M22 和上位機的通訊數據接口為UART ,電平為TTL/ CMOS , 波特率為標稱的300~115200bp s 的自適應波特率,只要是這個區間的標稱波特率,模塊自動識別,無須用戶去干預,可以接成全串口或者半串口通訊。所謂的全串口,是指DB9 的九條線都需要接上,所謂的半串口則只接RXD , TXD 和GND 就可以進行通訊了。本系統采用半雙工模式,則模塊的RXD 可以直接連接TMS470R1A256 的TXD ,模塊的TXD 可以直接連接TMS470 R1A256 的RXD ,如圖6 所示。

?
圖6 M22 與TMS470R1A256 硬件連接
4 系統軟件設計
系統上電后,首先對系統進行初始化。然后進行自檢,自檢范圍包括數據存儲器、時鐘和I/ O 口,自檢后根據自檢結果在顯示器上顯示相關信息。
如果自檢不通過,顯示"自檢不正常"和錯誤代碼。
自檢通過后,然后進入駕駛員身份認證,通過后,LCD 顯示相關數據,等待數據刷新。系統主程序流程圖如圖7 所示。

?
圖7 系統主程序流程圖
4. 1 數據采集
記錄儀讀取到原始數據后,根據脈沖量和車輛特征系數等能夠計算出總累計行駛里程、最近2 個日歷天的累計行駛里程、最近360 小時內的累計行駛里程、每200 毫秒的速度和每分鐘的速度。
記錄儀采集的脈沖來自于速度傳感器,該速度傳感器每轉產生8 個脈沖,而車輛在每公里使速度傳感器旋轉的轉數由車輛特征系數決定。記錄儀根據所記錄的脈沖數,可以得到車輛行駛的里程。
由脈沖數計算出行駛速度,只要先由脈沖數計算得到里程數,再除以時間,即可得到速度。
4. 2 GPRS 設計
M22 支持GPRS CLASS4 , 即下行速度42. 8 Kbp s ,上行速度21. 4 Kbp s.同時,M22 也支持嵌入式的TCP/ IP 協議。這個嵌入式的TCP/ IP協議解決了從命令模式連接到數據傳輸模式的一個比較復雜的過程。
因為有了嵌入式的TCP/ IP ,所以可以實時的傳輸大量汽車記錄數據,實現實時監控車輛的運行情況。使用TCP 協議進行數據通信時,必須要經過三個階段,第一個階段是連接建立階段,第二個階段是數據收發階段,第三個階段是連接釋放階段。
本系統中發送短消息采用而PDU 模式,因為它不僅支持中文短信,也能發送英文短信。PDU模式收發短信可以使用3 種編碼: 72bit 、82bit 和UCS2 編碼。
5 結 論
本設計是在傳統記錄儀上,添加GPS , GPRS模塊,并對該系統進行測試的結果是能夠實現精確定位(民用標準) 、遠程監控、電子狗及數據傳輸等功能,實現了基本記錄儀與GPS 導航一體化,滿足系統的設計要求。


























 工商網監
工商網監
評論