 電子發燒友App
電子發燒友App


???????視頻監控作為一種遠程監測、監控手段,以其信息的豐富性和結果的直觀性受到諸多行業的青睞,被廣泛應用于自動控制、產品檢測、安全監控、信息采集等領域。?
????? 1 概述
????? ?視頻監控作為一種遠程監測、監控手段,以其信息的豐富性和結果的直觀性受到諸多行業的青睞,被廣泛應用于自動控制、產品檢測、安全監控、信息采集等領域。其基本工作原理是通過攝像機采集被監視對象的圖像信息,并傳送到相應的終端設備和控制設備,實現監控功能。在這些系統中,攝像機拍攝的圖像質量往往是系統應用效果的決定性因素,因此必須根據拍攝現場的條件對攝像機進行適當的控制。
?????? 目前,監控系統中采用的攝像機從結構上主要分為兩類,一類是具有內置鏡頭的一體化攝像機,另一類是需要選配鏡頭的獨立攝像機。前者結構簡單使用方便,并且具備多種控制功能,允許用戶直接通過相關設備遠端控制各項拍攝參數(包括光圈大小、快門速度、圖像增益、圖像聚焦、變焦等),運用靈活,但是由于其內置鏡頭性能的影響,限制了它的使用范圍,在一些環境特殊或者拍攝要求較高的場合并不適用。而后一類攝像機可以根據拍攝現場的需要選配合適的攝像鏡頭,從而滿足各種拍攝需要,但是對這類攝像機拍攝參數的控制相對困難,尤其是對光圈、聚焦、變焦等參數的調節必須通過對鏡頭本身進行控制來實現,因此需要額外增加一組攝像鏡頭控制電路來完成這一功能。
?????? ?本文針對這一問題,討論了三可變攝像鏡頭的控制方式和控制電路設計。
???? ? 2 攝像鏡頭控制原理
?????? 攝像機鏡頭的主要參數包括:配套攝像機CCD(Charge Coupled Device電荷耦合器,即攝像機的光感元件)的大小、焦距、光圈、聚焦方式和接口,其中焦距、光圈和聚焦是在拍攝過程中需要精心調節的參數,尤其是光圈大小的調節更是攝像機適應光線變化的根本方法。按照攝像機鏡頭光圈的調節方式,鏡頭主要分為自動光圈和手動光圈兩類。
?????? 自動光圈鏡頭根據驅動方式的不同分為視頻驅動和直流驅動兩種,但是都可以根據攝像機成像的亮度,通過鏡頭內部電路自動調節光圈的大小,從而達到較好的拍攝效果。這類鏡頭不需要過多的外部控制電路,尤其是視頻驅動自動光圈鏡頭,僅需要將攝像機產生的視頻圖像模擬信號接入鏡頭光圈控制端即可。這類鏡頭雖然可以根據外部光線的情況自動調節光圈大小以達到較好的成像效果,但是由于其調節過程對于外部控制器是不開放的,因此在一些需要系統控制器進行特殊控制的場合并不完全適用。另外。目前的高清晰工業攝像機往往沒有視頻圖像的模擬輸出,因此使用自動光圈鏡頭也存在一些困難。
?????? 手動光圈鏡頭分為定焦鏡頭、手動光圈變焦鏡頭和三可變鏡頭。其中,定焦鏡頭和手動光圈鏡頭都需要通過手工調節鏡頭的光圈、聚焦等參數實現鏡頭的調節,因此對于自動工作的系統適應性較差。三可變鏡頭可以通過鏡頭內部電機進行光圈、變焦、聚焦的調節,實現鏡頭參數的完全電可控,便于自動控制系統和遠端監控根據實際應用需要用程序調節鏡頭的拍攝參數.以滿足特定的拍攝要求。本文主要針對這一類鏡頭,并以Computar的H6Z0812M型TV ZOOM LENS三可變鏡頭為例討論其控制電路的設計。
??????此鏡頭的控制主要通過在三對控制信號線上加載+8 V~+12 V或-8 V~12 V電源實現。這三對控制信號線分別對應光圈、變焦、聚焦參數的調節,而每對控制信號的電源極性和存在時間長短決定了參數變化的方向和變化量的大小。例如:在光圈控制端輸入+12 V電源則光圈變大,通電時間越長光圈開的越大:反之,輸入-12 V電源則光圈變小。通電時間越長則光圈變得越小。本文所討論的鏡頭控制電路主要按照系統終端或計算機的控制指令,為三可變鏡頭的三個輸入端提供具有精確脈沖寬度、正確極性和合適幅度的控制電壓信號,實現系統控制器對鏡頭參數的完全控制。
?????? 3 三可變鏡頭控制電路設計
????? 根據前面的介紹,可以確定三可變鏡頭的控制電路完成控制功能需要三個步驟:1)與控制計算機進行通信,接收控制指令;2)解析控制指令的內容,生成基本控制信號;3)控制功率電路產生鏡頭控制所需的控制信號。由于需要完成數據通訊和指令解析的功能,本文選擇具有串行通信接口的51系列單片機89C51為核心設計鏡頭的控制電路。電路與上述三個步驟的工作相對應,分為串行通信電路、中心控制電路、執行電路三個部分。
???? 3.1 串行通信電路
????? 89C51單片機的串行接口采用了TTL電平方式,即2.4 V以上代表數字1,0.45 V以下代表數字0,而一般的標準串行通信標準RS232則用大于+2V的電壓表示數字0,用小于-2 V的電壓表示數字1。因此,89C51與控制計算機之間的串行通信接口必須經過電壓轉化。一般的方法是采用專用器件(如MAX232等)完成這一轉換,但是需要額外提供一組±12 V電源,不利于設備的安全,另外由于電路只需要接收串行信息,因此本設計采用如圖1所示的電路完成電平轉換,實現串行通信。
?
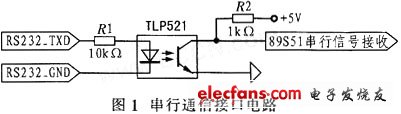
???? ?當RS232傳送數字“0”時,TXD和GND之間出現一個大于+2 V的電壓,光電耦合器TLP521一次側發光,二次側導通,輸出低電平,對應TTL邏輯“0”;當RS232傳送數字“1”時,TXD和GND之間出現一個小于-2 V的電壓,光電耦合器TLP521一次側不發光,二次側不導通,輸出高電平,對應TTL邏輯“1”,從而完成了電平轉換,實現了串行數據的接收。這一電路不需要額外提供±12V電源,而且能夠避免控制計算機與鏡頭控制電路的直接電氣連接,對于野外應用具有更高的安全性。
????? 3.2 執行電路設計
?
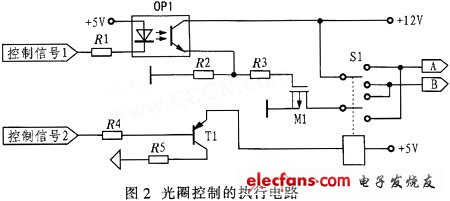
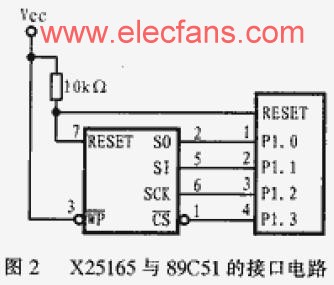
?????? 此部分的硬件設計主要是實現三可變鏡頭控制信號的輸出。圖2所示為鏡頭光圈的控制電路。聚焦和變焦的控制電路與之完全相同。
????? 電路中雙刀雙擲繼電器S1用于進行電源極性的變換,實現控制參數變化方向的選擇。當S1線包不通電時,AB端輸出+12 V電壓,控制光圈變大;當S1線包通電時,AB端輸出-12 V電壓,控制光圈縮小,完成控制參數變化方向的轉換。
????? 參數變化數值的控制通過控制驅動電壓的存在時間來實現。但是繼電器機械動作的持續性使它難以實現精確的通斷時間控制,其誤差一般在10ms以上,因此在本電路中采用MOSFET作為電子開關,實現通斷時間的精確控制,誤差小于0.1 ms。常態下MOSFET截止,輸出端A、B無電流,光圈不動作。
????? 在需要擴大光圈時,S1線包不通電,A端接+12 V,B端通過MOSFET接地,然后51單片機發出控制信號,使MOSFET導通,輸出A、B端形成電流回路,驅動光圈擴大;在需要縮小光圈時,S1線包通電,B端接+12 V,A端通過MOSFET接地,然后51單片機發出控制信號,使MOSFET導通,輸出A、B端形成電流回路,驅動光圈縮小。這一電路結構和工作方式不僅實現了動作時間的精確控制,還可有效地避免電路因帶電切換而造成的打火現象,提高了繼電器的工作壽命,減少了干擾。
???? ?此外,電路中的光電耦合器OP1主要用于隔離和變換51單片機的+5 V電源電壓和鏡頭動作的+12 V驅動電壓;三極管T1用來控制對繼電器S1線包的供電。
?????? ?3.3 中心控制電路及軟件設計
?????? 中心控制電路如圖3所示。鏡頭控制模塊的控制核心是89C51。主要實現接收控制指令、解析控制指令和執行控制指令三項功能。軟件采用51系列單片機的匯編語言編寫。主要是看重使用匯編語言具有執行速度快。可精確掌握動作時間,所占內存小等方面的優勢。
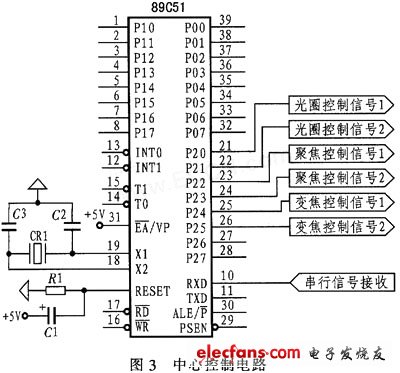
???????PC與89C51之間采用異步串行通訊方式。數據位最多可為8位,定義為動作類型和動作時間兩部分。用數據位前3位表示6種動作狀態,包括光圈擴大、光圈縮小、圖像放大、圖像縮小、焦距變大和焦距變小。數據位后5位表示動作時間,一共可以表示32種不同動作時間。根據軟件要實現的三項功能,程序首先進行初始化。89C52的兩個定時/計數器分別用作波特率設定和動作時間計時。通過對工作方式控制寄存器TMOD的設置就可完成對兩個定時/計數器工作模式的定義。定時/計數器1采用工作方式2,用于定義波特率。定時/計數器0采用工作方式1,用于鏡頭動作時間控制。
??????? 然后是指令的處理部分。通過“邏輯與ANL”運算將指令分解為動作類型和動作時間兩部分。利用比較轉移指令CJNE進行動作類型篩選,通過對工作寄存器組中R1、R2的賦值完成對引腳的設置:
???
????? 采用中斷方式進行引腳輸出。由于在帶電狀態下變換雙刀雙擲開關的狀態可能會“打火”,為避免這種情況,在對R1,R2賦值時要實現雙刀雙擲繼電器先進行動作變換,后通電。兩步動作的間隔為10ms。而動作時間以10 ms為步長。根據預先設計的指令協議可以控制動作時間的范圍在0 ms~320 ms之間,可滿足本模塊需求。
????? 4 結束語
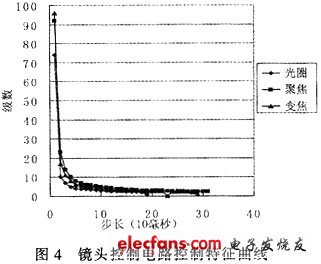
???? 通過對本電路軟硬件的改進和調試,獲得了預期的應用效果,實現了對鏡頭的定性定量控制。電路的控制特性曲線如圖4所示,圖中橫坐標表示參數的變化步長,單位為10 ms;縱坐標表示參數最大變化范圍所需的驅動級數。
????? 本控制電路結構簡單,控制可靠,環境適應性強,實現了智能終端設備對拍攝參數的完全控制。例如終端可以在圖像平均亮度較高的情況下擴大攝像鏡頭的光圈,以使局部陰影中的影像更清晰。具體的控制方式可根據實際需要定制。
?










 工商網監
工商網監
評論