 電子發燒友App
電子發燒友App


警用車輛的指揮調度、運鈔車的監控與安全調度、出租車的經營管理和合理調度,已成為公安、銀行以及公交運輸系統中越來越重要的問題。GPS全球定位技術的出現給車輛、輪船等移動目標的導航定位提供了精確、實時的定位能力。集成定位,通信、汽車行駛記錄儀等多項功能;具有強大的業務調度功能和數據處理能力;支持電話本呼叫、文字信息語音播報;具有安防報警、剪線報警及遠程安全斷油、斷電安全保護功能;預留多個RS-232接口和RS485接口,可外接計價器、攝像頭、麥克風、耳機、TTS語音合成盒子。分體式設計主機可隱蔽安裝,自備高量備用電池可供車載終端的無電情況下工作報警。
1 車載移動終端
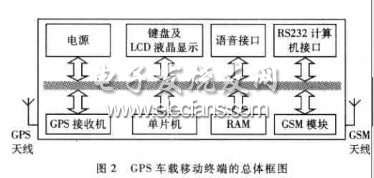
GPS車載移動終端采用世界領先的GPS全球衛星定位技術、無線通信技術及計算機數據處理技術,可為用戶提供全方位、全時域空間位置信息。GPS車載移動終端在GPS移動信息服務系統中的應用結構如圖1所示。
?
通過GPS移動信息服務系統,車載移動終端可以實現如下基本功能:
(1)實時定位功能:運用GPS實現定位獲得車輛高精度的位置及狀態信息,通過電子地圖系統查出車輛地理位置,實現定位和跟蹤,并根據需要通知車主或控制中心。
(2)報警功能:為確保人、車安全,設計了多種條件下觸發報警功能。
①緊急報警:當車主在遇到緊急情況、車輛故障、交通事故、醫療等情況下,只要按動緊急情況按鍵,即可通知車主家人、控制中心、汽車俱樂部。通過數據分析可得知車輛位置并設法盡快提供幫助。
②狀態報警:可遠程遙控設置超速、超加速、越界、停車時間過長、振動、車門動作、GPS無信號、蓄電池電壓低等多種報警功能。報警后車主或控制中心會收到報警信息和車輛位置信息。狀態報警可以由用戶設定來選擇各種報警有效與否。
(3)車載電話功能:可以實現完全的GSM車載電話功能。配接免提裝置可實現免提通話功能,保證行車安全。
(4)汽車黑匣子功能:可記錄汽車最近一段時間的運行狀態和軌跡。可根據設置記錄一定時間或距離的汽車狀態和軌跡,為運營和交通事故處理提供依據。
(5)汽車防盜器:具有近程和遠程控制及報警功能。近程可通過RF來實現遙控解除和設置警界狀態功能;遠程可通過GSM網絡將汽車狀態通知車主或控制中心,且車主和控制中心可遙控解除和設置警界狀態。
(6)具有嚴格的密碼認證功能,車主具有隱私權。
2 GPS車載移動終端設計
GPS車載移動終端主要由GPS模塊及天線、GSM通信模塊、微處理器、LCD液晶顯示模塊、鍵盤等單元組成。
2.1 主要硬件模塊選型
2.1.1 微處理器
GPS 是英文Global Positioning System(全球定位系統)的簡稱,而其中文簡稱為"球位系".GPS是20世紀70年代由美國陸海空三軍聯合研制的新一代空間衛星導航定位系統 .其主要目的是為陸、海、空三大領域提供實時、 全天候和全球性的導航服務,并用于情報收集、核爆監測和應急通訊等一些軍事目的,是美國獨霸全球戰略的重要組成。經過20余年的研究實驗,耗資300億美元,到1994年3月,全球覆蓋率高達98%的24顆GPS衛星星座己布設完成。
GPS車載移動終端中控制器的選擇至關重要,它不僅影響整個系統的性能,而且關系到車載移動終端的成本。本車載移動終端選擇美國CYGNAL公司的C8051F020單片機做處理器。C8051F020與一般的8051相比,其優點在于:(1)運行速度快。芯片采用流水線指令結構,70%的指令其執行時間為1個或2個系統時鐘周期,當工作在最大系統時鐘頻率25MHz時,執行速度可達25MIPS.(2)ADC采樣速率高,可達到500Kbps,不必外加ADC芯片就能滿足需要。(3)片內存儲空間大。(4)調試方便。(5)安全機制可靠。(6)外部資源豐富,有8個8位的I/O端口,硬件有SMBus(I2C兼容)、SPI及2個增強型UART串口等。
2.1.2 GPS模塊
GPS模塊選用瑞士U-BLOX公司的TIM GPS接收器。瑞士U-BLOX公司專門從事GPS集成電路開發,其突出特點是可以將高性能GPS定位接收機做得非常小。TIM GPS接收器自身包含低功耗GPS接收器,尺寸僅為25.4mm×25.4mm×3mm,相當于一個普通芯片的大小,非常適合于對尺寸要求嚴格的高端應用,如手機、PDA、車載導航等GPS的應用。
2.1.3 通信模塊
TC35是SIEMENS公司推出的新一代無線通信GSM模塊,可以快速、安全、可靠地實現系統方案中的數據和語音傳輸、短消息服務(Short Message Service)及傳真。模塊的工作電壓為3.3~5.5V,可以工作在900MHz和1800MHz 2個頻段,所在頻段功耗分別為2W(900MHz)和1W(1800MHz)。模塊有AT命令集接口,支持數據、語音、短消息和傳真服務等。此外,該模塊還具有電話簿功能、多方通話及漫游檢測功能。常用工作模式有省電、IDLE和TALK等模式。通過獨特的40引腳的ZIF連接器,實現電源連接、指令、數據、語音信號及控制信號的雙向傳輸。通過ZIF連接器及50Ω天線連接器,可分別連接SIM卡支架和天線。
2.2 GPS車載移動終端的工作原理
TIM GPS接收機通過GPS天線接收衛星信號,解算出車載移動終端的位置信息,一方面存儲于緩沖區中,作為日后路徑回放用,另一方面直接由單片機通過串口發送到GSM模塊。GSM模塊再通過GSM短消息方式把位置信息發送到監控中心。監控中心通過GIS軟件平臺就可以直觀、清晰地在電子地圖上發現車輛的軌跡,實現車輛的實時監控。另外,車載終端也可以發送報警信息和語音信息到監控中心;監控中心也可以通過文字或語音的方式對車輛實施調度。
2.3 GPS車載移動終端的軟件設計
2.3.1 GPS數據的提取
目前幾乎所有GPS廠商都遵循美國國家海洋電子協會(National Marine Electronics Association)制定的NMEA-0183V20通信標準格式。TIM GPS接收機的輸出語句按串行通信協議,數據格式為8個數據位、1個起始位、1個停止位,無奇偶校驗。可以根據需要選擇傳輸速率。其輸出語句采用的是NMEA0183即ASCII格式碼,輸出語句達十多種,包括GGA、GSA、GSV、RMC、RMT、VTG等。這些定位數據語句不僅給出了位置、速度、時間等信息,而且指出當地的衛星接收情況。實際導航應用讀取GPS的空間定位數據時,可以根據需要每隔幾秒鐘更新一次經緯度和時間數據。而更頻繁的數據更新就沒有必要了,而且不需要了解NMEA0183通信協議的全部信息,僅需要從中挑選出所需要的那部分定位數據。RMC數據設置描述如表1所示,其數據設置示例如下:
?
$GPRMC,130304.0,A,4717.115,N,00833.912,E,000.04,205.5,200601,01.3,W*7C
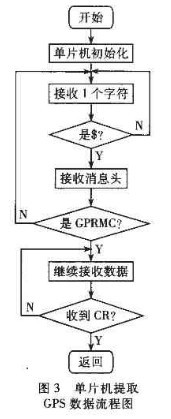
單片機提取GPS數據的流程圖如圖3所示。
?
2.3.2 TC35的AT指令控制
單片機對TC35進行初始化并通過AT指令控制短消息的收發。對短消息的控制有PDU模式和Text模式。Text模式不能發中文,所以本方案中采用PDU模式進行短消息的接收和發送。
首先對TC35進行初始化,設置短消息發送格式AT+CMGF=1,設置短消息中心AT+CSCA="+8613800531500"(短消息中心),設置短消息到達自動提示AT+CNM1=1,1,0,0,1.
發送短消息的過程:首先設置發送短消息的長度AT+CMGS=;等待TC35模塊返回字符">",則可以將PDU數據輸入;短消息發送成功后,模塊返回OK.
接收短消息的過程:單片機接收到指令+CMT1:"SM",INDEX(信息存儲位置),就開始讀取PDU數據,AT命令為AT+CMGR=INDEX.
2.3.3 車載移動終端軟件
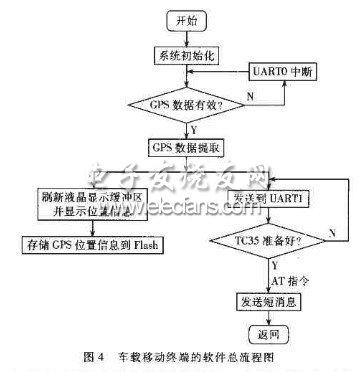
車載移動終端軟件總流程圖如圖4所示。
?
本設計依據GPS全球定位系統、GSM公眾網絡以及通用的單片機技術,實現了車輛的定位監控。方案經過試驗驗證其技術可行,并且構成的系統成本低、應用范圍廣,為智能交通系統中的定位監控提出了一個較好的解決方法。













 工商網監
工商網監
評論