 電子發燒友App
電子發燒友App


1、本文使用的STM32芯片是STM32F103RB,使用的資源是片內的USART1。
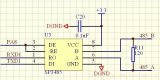
2、下面是我的電路連接圖:
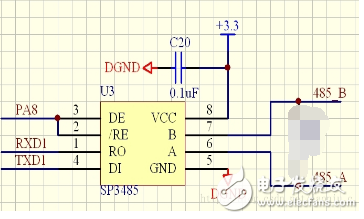
注:電路可以稍做修改更好,在B和A分別接下拉電阻到地和上拉電阻到5v,阻值選擇為10K即可,這是為了在沒有進行數據傳輸時保證兩條數據線的狀態為確定值。
做一下簡單的說明:
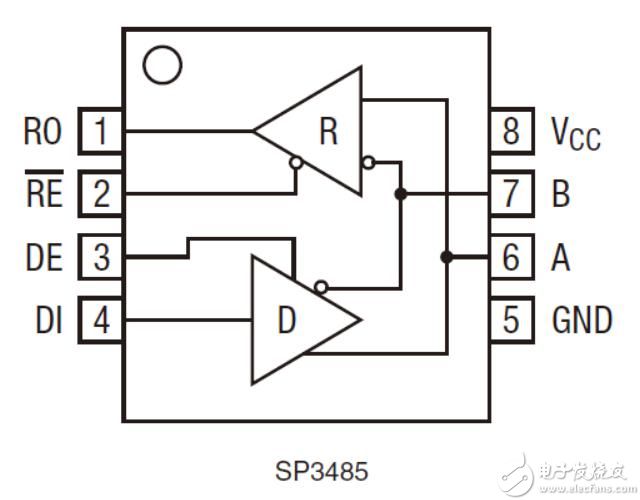
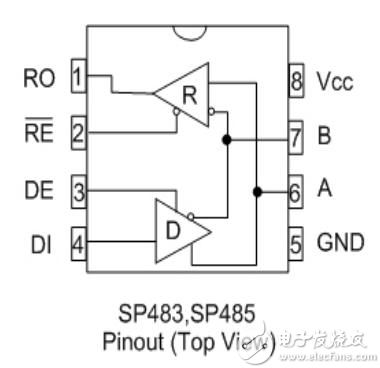
(1)PA8是sp3485的發送/接收使能端,sp3485只能支持半雙工的通信,所以這個引腳就是來控制這個芯片到底是收數據還是發數據的。
(2)在有些電路連接中,sp3485的A和B端會一個被連接一個上拉電阻到3.3V,另一個會連接一個下拉電阻到GND,這樣做的目的是當本sp3485不參與通信時不會影響網絡的穩定性。
3、本次調試方式
PC機——USB轉232轉換頭——RS232/RS485雙向轉換頭——sp3485——STM32,因為是第一次調試sp3485芯片,所以當然沒有太大意,先拿電腦調試,調試通了再看板子和板子之間的通信了。
4、本次試驗的代碼:
main函數:
int main(void)
{
/* Configure the system clocks */
RCC_Configuration();
/* NVIC Configuration */
NVIC_Configuration();
/* Configure the GPIOs */
GPIO_Configuration();
/* Configure the USART1 */
USART_Configuration();
GPIO_SetBits(GPIOA, GPIO_Pin_8); //PA8是sp3485發送/接收控制端,這里先設置為發送(實現的功能就是上電之后STM32先向PC發送一個4和一個3)
delay_ms(2);//稍稍延時一下,原因去查看sp3485的手冊吧
USART_ClearFlag(USART1,USART_FLAG_TC);//這一句很關鍵,如果沒有這一句這個4會發送不成功或者發送錯誤的,
//其實手冊上講了使能發送位后會發送一個無用的幀,所以那個幀發送完了這個
//發送完成的標志位USART_FLAG_TC當然也被置位了。
USART_SendData(USART1, 4);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);//上面清除了發送完成標志位,那么這里就可以等待發送完成標志位被置位來判斷這一幀是否發完了
USART_SendData(USART1, 3);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
while(1)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_8);//現在把PA8清零,試試接收PC機發送過來的數據
delay_ms(2);//稍稍延時一下,原因去查看sp3485的手冊吧
USART_ClearFlag(USART1,USART_FLAG_RXNE);//既然上面開始發送之前都將發送完成標志位清零,這里也將接收完成標志位清下零,就當是一個好習慣吧
while(1)
{
if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)==SET)//判斷是否有一幀數據接收完成
{
buf[j++] = USART_ReceiveData(USART1); //接收完成的話就直接放到緩存區域里
}
if(10 == j)//接收完成10個之后就跳出去,不再接收了,有個意思就OK了
break;
}
j = 0;//清零一下j變量,使得實驗可以反復接收PC發過來的10個數據
GPIO_SetBits(GPIOA, GPIO_Pin_8);//將sp3485設置為發送數據
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
delay_ms(2);//稍稍延時一下,原因去查看sp3485的手冊吧
for(i = 0; i 《 10; i++)
{
USART_SendData(USART1, buf[i]);//將數據依次發送出去
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
}}}
注:在用STM32的串口做485通信的時候,發送數據的時候,檢測到最后一個數據發送后的標志位已經置位,但是還不能立即失能485芯片的發送引腳,因為雖然標志位已經置位,485芯片的數據還沒有完全發送出去,這個時候需要ms級別的延時,一般2個毫秒左右基本就沒有問題了。
RCC設置函數:
void RCC_Configuration(void)
{
/* RCC system reset(for debug purpose) */
RCC_DeInit();
/* Enable HSE */
RCC_HSEConfig(RCC_HSE_ON);
HSEStartUpStatus = RCC_WaitForHSEStartUp();
if(HSEStartUpStatus == SUCCESS)
{
/* HCLK = SYSCLK */
RCC_HCLKConfig(RCC_SYSCLK_Div1);
/* PCLK2 = HCLK */
RCC_PCLK2Config(RCC_HCLK_Div1);
/* PCLK1 = HCLK/2 */
RCC_PCLK1Config(RCC_HCLK_Div2);
/* Flash 2 wait state */
FLASH_SetLatency(FLASH_Latency_2);
/* Enable Prefetch Buffer */
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
/* PLLCLK = 8MHz * 9 = 72 MHz */
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
/* Enable PLL */
RCC_PLLCmd(ENABLE);
/* Wait till PLL is ready */
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
{
}
/* Select PLL as system clock source */
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
/* Wait till PLL is used as system clock source */
while(RCC_GetSYSCLKSource() != 0x08)
{
}}
/* Enable USART1 and GPIOA clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC, ENABLE);
}
GPIO設置函數:
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure PC. as Output push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//GPIO_Mode_Out_PP = 0x10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//GPIO_Mode_Out_PP = 0x10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
USART設置函數:
void USART_Configuration(void)
{
USART_InitTypeDef USART_InitStructure;
USART_ClockInitTypeDef USART_ClockInitStructure;
USART_ClockInitStructure.USART_Clock = USART_Clock_Disable;
USART_ClockInitStructure.USART_CPOL = USART_CPOL_Low;
USART_ClockInitStructure.USART_CPHA = USART_CPHA_2Edge;
USART_ClockInitStructure.USART_LastBit = USART_LastBit_Disable;
/* Configure the USART1 synchronous paramters */
USART_ClockInit(USART1, &USART_ClockInitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
/* Configure USART1 basic and asynchronous paramters */
USART_Init(USART1, &USART_InitStructure);
/* Enable USART1 */
USART_Cmd(USART1, ENABLE);
}
NVIC設置函數:
void NVIC_Configuration(void)
{
#ifdef VECT_TAB_RAM
/* Set the Vector Table base location at 0x20000000 */
NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else /* VECT_TAB_FLASH */
/* Set the Vector Table base location at 0x08000000 */
NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
}










 工商網監
工商網監
評論