 電子發燒友App
電子發燒友App


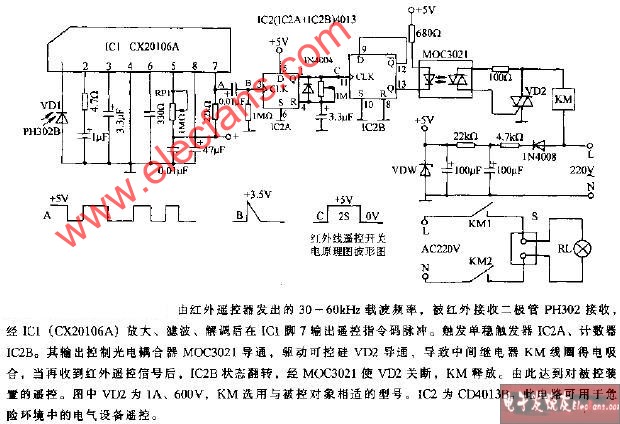
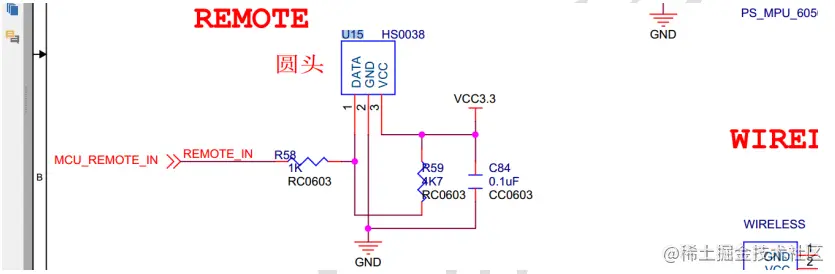
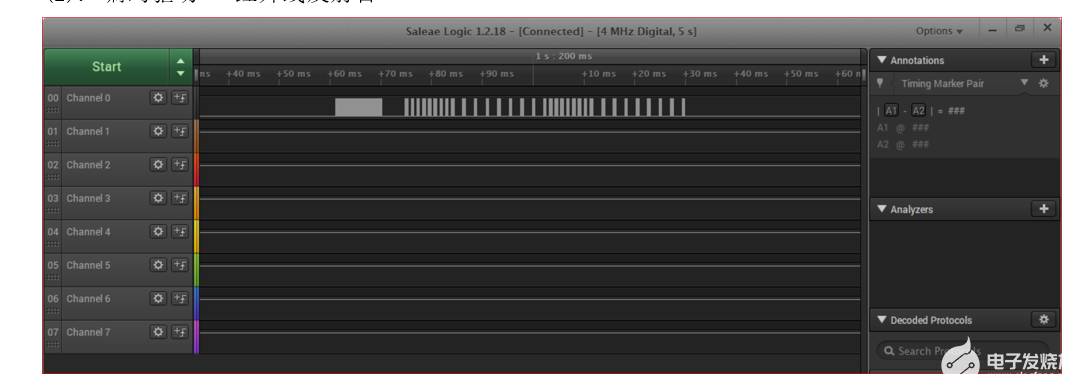
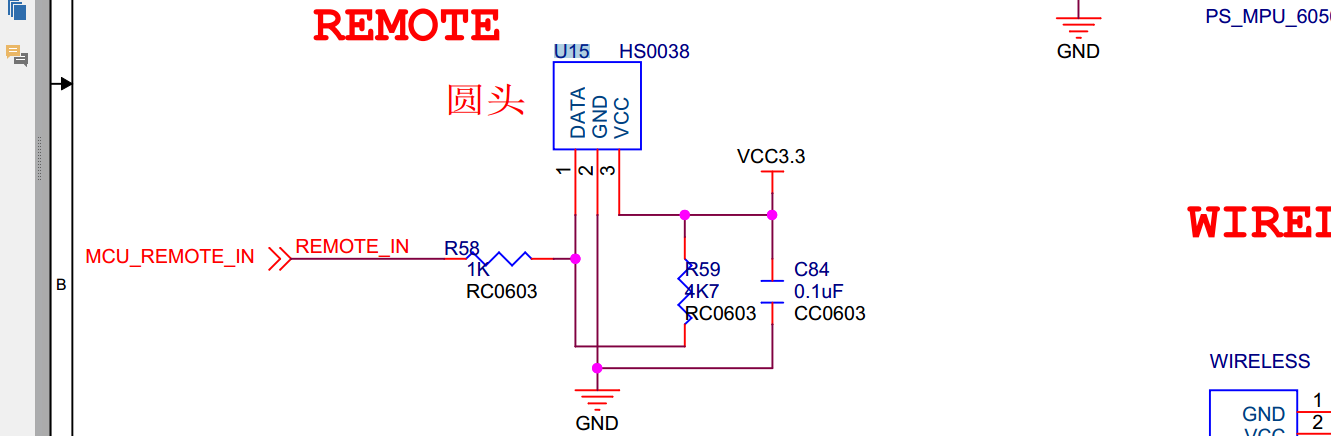
紅外線一開始發送一段13.5ms的引導碼,引導碼由9ms的高電平和4.5ms的低電平組成,跟著引導碼是系統碼,系統反碼,按鍵碼,按鍵反碼,如果按著鍵不放,則遙控器則發送一段重復碼,重復碼由9ms的高電平,2.25ms的低電平,跟著是一個短脈沖。
#include“at89x52.h”
#defineNULL0x00//數據無效
#defineRESET0X01//程序復位
#defineREQUEST0X02//請求信號
#defineACK0x03//應答信號,在接收數據后發送ACK信號表示數據接收正確,
也位請求信號的應答信號
#defineNACK0x04//應答信號,表示接收數據錯誤
#defineBUSY0x05//忙信號,表示正在忙
#defineFREE0x06//空閑信號,表示處于空閑狀態
#defineREAD_IR0x0b//讀取紅外
#defineSTORE_IR0x0c//保存數據
#defineREAD_KEY0x0d//讀取鍵值
#defineRECEIVE0Xf400//接收緩沖開始地址
#defineSEND0xfa00//發送緩沖開始地址
#defineIR0x50//紅外接收緩沖開始地址
#defineHEAD0xaa//數據幀頭
#defineTAIL0x55//數據幀尾
#defineSDAP1_7
#defineSCLP1_6
unsigned char xdata *buf1;//接受數據緩沖
unsigned intbuf1_length;//接收到的數據實際長度
unsigned char xdata *buf2;//發送數據緩沖
unsigned intbuf2_length;//要發送的數據實際長度
bit buf1_flag;//接收標志,1表示接受到一個數據幀,0表示沒有接受到數據幀或數據
幀為空
bit buf2_flag;//發送標志,1表示需要發送或沒發送完畢,0表示沒有要發送的數據或
發送完畢
unsigned char state1,state2;//用來標志接收字符的狀態,state1用來表示接
收狀態,state2用來表示發送狀態
unsigned char data *ir;
union{
unsigned char a[2];
unsigned int b;
unsigned char data *p1[2];
unsigned int data *p2[2];
unsigned char xdata *p3;//紅外緩沖的指針
unsigned int xdata *p4;
}p;
//union{//
//unsigned char a[2];//
//unsigned int b;
//unsigned char data *p1[2];
//unsigned int data *p2[2];
//unsigned char xdata *p3;
//unsigned int xdata *p4;//地址指針
//}q;//
union{
unsigned char a[2];
unsigned int b;
}count;
union{
unsigned char a[2];
unsigned int b;
}temp;
union{
unsigned char a[4];
unsigned int b[2];
unsigned long c;
}ir_code;
union{
unsigned char a[4];
unsigned int b[2];
unsigned long c;
unsigned char data *p1[4];
unsigned int data *p2[4];
unsigned char xdata *p3[2];
unsigned int xdata *p4[2];
}I;
unsigned char ir_key;
bit ir_flag;//紅外接收標志,0為緩沖區空,1為接收成功,2為緩沖溢出
void sub(void);
void delay(void);
void ie_0(void);
void tf_0(void);
void ie_1(void);
void tf_1(void);
void tf_2(void);
void read_ir(void);
void ir_jiema(void);
void ir_init(void);
void ir_exit(void);
void store_ir(void);
void read_key(void);
void reset_iIC(void);
unsigned char read_byte_ack_iic(void);
unsigned char read_byte_nack_iic(void);
bit write_byte_iic(unsigned char a);
void send_ack_iic(void);
void send_nack_iic(void);
bit receive_ack_iic(void);
void start_iic(void);
void stop_iic(void);
void write_key_data(unsigned char a);
unsigned int read_key_data(unsigned char a);
void ie0(void)interrupt 0{ie_0();}
void tf0(void)interrupt 1{tf_0();}
void ie1(void)interrupt 2{ie_1();}
void tf1(void)interrupt 3{tf_1();tf_2();}
void tf2(void)interrupt 5{//采用中斷方式跟查詢方式相結合的辦法解碼
EA=0;//禁止中斷
if(TF2){//判斷是否是溢出還是電平變化產生的中斷
TF2=0;//如果是溢出產生的中斷則清除溢出位,重新開放中斷退出
EA=1;
goto end;
}
EXF2=0;//清除電平變化產生的中斷位
*ir=RCAP2H;//把捕捉的數保存起來
ir++;
*ir=RCAP2L;
*ir++;
F0=1;
TR0=1;//開啟計數器0
loop:
TL0=0;//將計數器0重新置為零
TH0=0;
while(!EXF2){//查詢等待EXF2變為1
if(TF0)goto exit;//檢查有沒超時,如果超時則退出
};
EXF2=0;//將EXF2清零
if(!TH0)//判斷是否是長低電平脈沖過來了
{//不是長低電平脈沖而是短低電平
if(F0)count.b++;//短脈沖數加一
temp.a[0]=RCAP2H;//將捕捉數臨時存放起來
temp.a[1]=RCAP2L;
goto loop;//返回繼續查詢
}
else{//是低電平脈沖,則進行處理
F0=0;
*ir=temp.a[0];//把連續的短脈沖總時間記錄下來
ir++;
*ir=temp.a[1];
ir++;
*ir=RCAP2H;//把長電平脈沖時間記錄下來
ir++;
*ir=RCAP2L;
ir++;
if(ir》=0xda) {
goto exit;//判斷是否溢出緩沖,如果溢出則失敗退出
}
goto loop;//返回繼續查詢
}
exit:
ir_flag=1;//置ir_flag為1表示接收成功
end:
;
}
void rs232(void)interrupt4{
static unsigned char sbuf1,sbuf2,rsbuf1,rsbuf2;//sbuf1,sbuf2用來接收
發送臨時用,rsbuf1,rsbuf2用來分別用來存放接收發送的半字節
EA=0;//禁止中斷
if(RI){
RI=0;//清除接收中斷標志位
sbuf1=SBUF;//將接收緩沖的字符復制到sbuf1
if(sbuf1==HEAD){//判斷是否幀開頭
state1=10;//是則把state賦值為10
buf1=RECEIVE;//初始化接收地址
}
else{
switch(state1){
case 10:sbuf2=sbuf1》》4;//把高半字節右移到的半字節
sbuf2=~sbuf2;//把低半字節取反
if((sbuf2&0x0f)!=(sbuf1&0x0f))//判斷接收是否正確
{//接收錯誤,有可能接收的是數據幀尾,也有可能是接收錯誤
if(sbuf1==TAIL)//判斷是否接收到數據幀尾
{//是接收到數據幀尾
buf1=RECEIVE;//初始化接收的地址
if(*buf1==RESET)//判斷是否為復位命令
{
ES=0;
sbuf2=SP+1;
for(p.p1[0]=SP-0x10;p.p1[0]《=sbuf2;p.p1
[0]++)*p.p1[0]=0;
}
state1=0;//將接收狀態標志置為零,接收下一個數據幀
buf1_flag=1;//置接收標志為1,表示已經接收到一個數據幀
REN=0;//禁止接收
}
else
{//不是接受到數據幀尾,表明接收錯誤
state1=0;// 將接收狀態標志置為零,重新接收
buf1=RECEIVE;//初始化發送的地址
*buf1=NACK;//把NACK信號存入接收緩沖里
buf1_flag=1;//置標志位為1,使主程序能對接收錯誤進行處理
REN=0;//禁止接收
}
}
else
{//接收正確
rsbuf1=~sbuf1;//按位取反,使高半字節變原碼
rsbuf1&=0xf0;//僅保留高半字節,低半字節去掉
state1=20;//將狀態標志置為20,準備接收低半字節
}
break;
case 20:sbuf2=sbuf1》》4;//把高半字節右移到的半字節
sbuf2=~sbuf2;//將低半字節取反
if((sbuf2&0x0f)!=(sbuf1&0x0f))//判斷接收是否正確
{//接受錯誤
state1=0;// 將接收狀態標志置為零,重新接收
buf1=RECEIVE;//初始化接收的地址
*buf1=NACK;//把NACK信號存入發送緩沖里
buf1_flag=1;//置標志位為1,使主程序能對接收錯誤進行處理
REN=0;//禁止接收
}
else
{
sbuf1&=0x0f;//僅保留低半字節,去掉高半字節
rsbuf1“=sbuf1;//高低半字節合并
*buf1++=rsbuf1;//將接收的數據保存至接收緩沖里,并且數據指針加一
buf1_length++;//接收數據長度加一
state1=10;//將state1置為10,準備接收下個字節的高半字節
}
break;
}
}
}
else{
TI=0;//清除發送中斷標志
if(buf2_length)//判斷發送長度是否為零
{//發送長度不為零
if(state2==0)//判斷是否發送高半字節
{//發送高半字節
sbuf2=*buf2;//將要發送的字節送到sbuf2
rsbuf2=~sbuf2;//取反,使高半字節變為反碼
sbuf2》》=4;//將高半字節右移到低半字節
rsbuf2&=0xf0;//保留高半字節,去掉低半字節
sbuf2&=0x0f;//保留低半字節,去掉高半字節
rsbuf2|=sbuf2;//合并高低半字節
SBUF=rsbuf2;//發送出去
state2=10;//將state2置為10準備發送下半字節
}
else
{//發送低半字節
sbuf2=*buf2;//將要發送的字節送到sbuf2
buf2++;//指針加一
buf2_length--;//發送數據長度減一
rsbuf2=~sbuf2;//取反,使低半字節變為反碼
rsbuf2《《=4;//將低半字節反碼左移到高半字節
rsbuf2&=0xf0;//保留高半字節,去掉低半字節
sbuf2&=0x0f;//保留低半字節,去掉高半字節
rsbuf2|=sbuf2;//合并高低半字節
SBUF=rsbuf2;//發送出
state2=0;
}
}
else
{//如果發送數據長度為零則發送數據幀尾
if(buf2_flag){//判斷是否發過數據幀尾
SBUF=TAIL;//將數據幀尾發送出去
while(TI==0);
TI=0;
buf2_flag=0;//置發送標志為零,表示發送完畢
}
}
}
EA=1;//開放中斷
}















 工商網監
工商網監
評論