 電子發燒友App
電子發燒友App


在微機測控系統中,經常要用到A/D轉換。常用的方法是擴展一塊或多塊A/D采集卡。當模擬量較少或是溫度、壓力等緩變信號場合,采用總線型A/D卡并不是最合適、最經濟的方案。這里介紹一種以GNS97C2051單片機為核心,采用TLC2543 12位串行A/D轉換器構成的采樣模塊,該模塊的采樣數據由單片機串口經電平轉換后送到上位機(IBM PC兼容機)的串口COM1或COM2,形成一種串行數據采集串行數據傳輸的方式。經實踐調試證實:該模塊功耗低、采樣精度高、可靠性好、接口簡便,有一定實用價值。
1 主要器件介紹
1.1 TLC2543串行A/D轉換器
模塊采用TI公司的TLC2543 12位串行A/D轉換器,使用開關電容逐次逼近技術完成A/D轉換過程。由于是串行輸入結構,能夠節省51系列單片機I/O資源,且價格適中。其特點有:
(1)12位分辨率A/D轉換器;
(2)在工作溫度范圍內10μs轉換時間;
(3)11個模擬輸入通道;
(4)3路內置自測試方式;
(5)采樣率為66kbps;
(6)線性誤差+1LSB(max)
(7)有轉換結束(EOC)輸出;
(8)具有單、雙極性輸出;
(9)可編程的MSB或LSB前導;
(10)可編程的輸出數據長度。

TLC2543的引腳排列如圖1所示。圖1中AIN0~AIN10為模擬輸入端; 為片選端;DIN 為串行數據輸入端;DOUT為A/D轉換結果的三態串行輸出端;EOC為轉換結束端;CLK為I/O時鐘;REF+為正基準電壓端;REF-為負基準電壓端;VCC為電源;GND為地。
1.2 GMS97C2051單片機
GMS97C2051是武漢力源公司和韓國LG公司聯合推出的一種性能價格比極高的 8位單片機,其指令系統與MCS-51系列完全兼容。GMS97C2051與AT89C2051兼容(可直接替換),但其性能價格比優于AT89C2051。引腳排列如圖2所示。
1.3 電平轉換器MAX3232
MAX3232為RS-232收發器,簡單易用,單+5V電源供電,僅需外接幾個電容即可完成從TTL電平到RS-232電平的轉換。
2 硬件設計
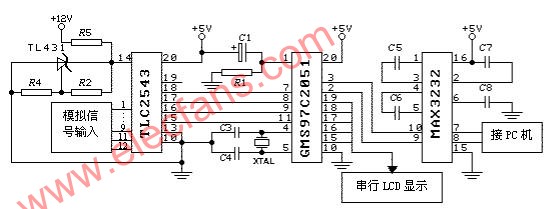
硬件電路如圖4所示。
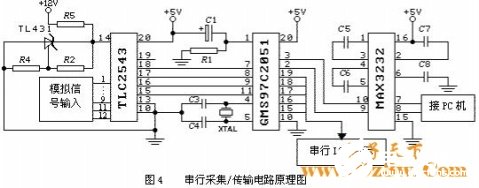
單片機GMS97C2051是整個系統的核心,TLC2543對輸入的模擬信號進行采集,轉換結果由單片機通過P3.5(9腳)接收,AD芯片的通道選擇和方式數據通過P3.4(8腳)輸入到其內部的一個8位地址和控制寄存器,單片機采集的數據通過串口(3、2腳)經MAX3232轉換成RS232電平向上位機傳輸。圖中串行LCD顯示電路僅用于調試,對采集/傳輸的數據進行監測。
3 單片機軟件設計
單片機程序主要包括串行數據采集模塊“DATA_SAM”和串行數據傳輸模塊“RS232”,調試所用到的顯示子程序在此略去。
TLC2543的通道選擇和方式數據為8位,其功能為:D7、D6、D5和D4用來選擇要求轉換的通道,D7D6D5D4=0000時選擇0通道,D7D6D5D4=0001時選擇1通道,依次類推;D3和D2用來選擇輸出數據長度,本程序選擇輸出數據長度為12位,即D3D2=00或D3D2=10;D1,D0選擇輸入數據的導前位,D1D0=00選擇高位導前。
TLC2543在每次I/O周期讀取的數據都是上次轉換的結果,當前的轉換結果在下一個I/O周期中被串行移出。第一次讀數由于內部調整,讀取的轉換結果可能不準確,應丟棄。
數據采集程序如下:
DATA_SAM:
MOV R0,#30H ;數據緩沖區首地址30H→R0
MOV R1,#00000000B ;0通道方式/通道數據
ACALL RD_AD ;第一次讀取的轉換結果可能不準確,丟棄。
MOV R1,#00010000B ;1通道方式/通道數據
ACALL RD_AD ;送1通道方式/通道數據并讀第0通道轉換結果
MOV @R0,R2 ;轉換結果存放到數據緩沖區,下同
INC R0
MOV @R0,R3
INC R0
MOV R1,#00100000B ;2通道方式/通道數據
ACALL RD_AD ;送2通道方式/通道數據并讀第1通道轉換結果
MOV @R0,R2
INC R0
MOV @RO,R3
INC R0
………… ;其它通道操作方式類推
RET
單片機通過編程產生串行時鐘,并按時序發送與接收數據位,完成通道方式/通道數據的寫入和轉換結果的讀出,程序如下,供數據采集模塊“DATA_SAM” 調用。
CLK EQU P3.3
DIN EQU P3.4
DOUT EQU P3.5
CS EQU P3.7
RD_AD:
CLR CLK ;清I/O時鐘
SETB CS ;設置片選為高
CLR CS ;設置片選為低
MOV R4,#08 ;先讀高8位
MOV A, R1 ;把方式/通道控制字放到A
LOP1:
MOV C,DOUT ;讀轉換結果
RLC A ;A寄存器左移,移入結果數據位,移出方式/通道控制位
MOV DIN,C ;輸出方式/通道位
SETB CLK ;設置I/O時鐘為高
CLR CLK ;清I/O時鐘
DJNZ R4,LOP1 ;R4不為0,則返回LOP1
MOV R2,A ;轉換結果的高8位放到R2中
MOV A,#00H ;復位A寄存器
MOV R4,#04 ;再讀低4位
LOP2:
MOV C,DOUT ;讀轉換結果
RLC A ;A寄存器左移,移入結果數據位
SETB CLK ;設置I/O時鐘為高
CLR CLK ;清I/O時鐘
DJNZ R4,LOP2 ;R4不為0,則返回LOP2
MOV R3,A ;轉換結果的低4位放到R3中
SETB CS ;設置片選為高
RET
串行數據傳輸模塊包括串行口初始化子程序和數據傳輸子程序,各子程序分別如下。其中數據傳輸采用查詢方式,也可以方便地改為中斷方式。
INIT_COM:
MOV SCON,#50H ;串口方式1工作,8位數據位,1位停止位,無奇偶校驗
MOV PCON,#80H ;SMOD=1,波特率增倍
MOV TMOD,#20H ;波特率設置,fOSC=12MHz,波特率=2* 2400,N=0F3H
MOV TH1,#0F3H
MOV TL1,#0F3H
SETB TR1 ;啟動定時器T1
RET
RS232:
MOV R0,#30H ;緩沖區首地址30H→R0
MOV R5,#22 ;發送數據長度→R5,11* 2=22
LOOP:
MOV A,@R0 ;取數據→A
MOV SBUF,A ;數據→SBUF
WAIT:
JBC TI,CONT ;判斷發送中斷標志,是1則轉到CONT,并清TI
SJMP WAIT
CONT:
INC R0
DJNZ R5,LOOP
RET
4 上位機串口接收程序設計
上位機接收數據所用C語言程序包括初始化子程序和接收子程序。各子程序分別如下:
void init_com1(void) /*初始化子程序*/
{
outportb(0x3fb,0x80); /*線控制寄存器高位置1,使波特率設置有效*/
outportb(0x3f8,0x18); /*波特率設置,與單片機波特率一致為4800bps*/
outportb(0x3f9,0x00);
outportb(0x3fb,0x03); /*線控制寄存器設置,8位數據位,1位停止位,無奇偶校驗*/
outportb(0x3fc,0x03); /*Modem控制寄存器設置,使DTR和RTS輸出有效*/
outportb(0x3f9,0x00); /*設置中斷允許寄存器,禁止一切中斷*/
}
void receive_data(void) /*查詢方式接收數據子程序*/
{
while(!kbhit())
{
while(!(inportb(0x3fd)&0x01));/*若接收寄存器為空,則等待*/
printf(“%x ”,inportb(0x3f8)); /*讀取結果并顯示*/
}
getch();
}
5 結論
本文給出的硬件和軟件均經過實踐檢驗,并且已經按照PC/104總線制作成數據采集卡,使用很方便,能夠滿足對數據采樣頻率要求不是特別高的應用場合。
責任編輯;zl












 工商網監
工商網監
評論