 電子發(fā)燒友App
電子發(fā)燒友App


RTOS有臨界區(qū),裸機(jī)依然有臨界區(qū)。
搞嵌入式玩過 RTOS 的朋友想必都對(duì) OS_ENTER_CRITICAL()、OS_EXIT_CRITICAL() 這個(gè)功能代碼對(duì)特別眼熟,在 RTOS 里常常會(huì)有多任務(wù)(進(jìn)程)處理,有些情況下一些特殊操作(比如 XIP 下 Flash 擦寫、低功耗模式切換)不能被隨意打斷,或者一些共享數(shù)據(jù)區(qū)不能被無序訪問(A 任務(wù)正在讀,B 任務(wù)卻要寫),這時(shí)候就要用到臨界區(qū)保護(hù)策略了。
所謂臨界區(qū)保護(hù)策略,簡(jiǎn)單說就是系統(tǒng)中硬件臨界資源或者軟件臨界資源,多個(gè)任務(wù)必須互斥地對(duì)它們進(jìn)行訪問。RTOS 環(huán)境下有現(xiàn)成的臨界區(qū)保護(hù)接口函數(shù),而裸機(jī)系統(tǒng)里其實(shí)也有這種需求。在裸機(jī)系統(tǒng)里,臨界區(qū)保護(hù)主要就是跟系統(tǒng)全局中斷控制有關(guān)。痞子衡之前寫過一篇 《嵌入式MCU中通用的三重中斷控制設(shè)計(jì)》,文中介紹的第三重也是最頂層的中斷控制是系統(tǒng)全局中斷控制,今天痞子衡就從這個(gè)系統(tǒng)全局中斷控制使用入手給大家介紹三種臨界區(qū)保護(hù)做法:
一、臨界區(qū)保護(hù)測(cè)試場(chǎng)景
關(guān)于臨界區(qū)保護(hù)的測(cè)試場(chǎng)景無非兩種。第一種場(chǎng)景是受保護(hù)的多個(gè)任務(wù)間并無關(guān)聯(lián),也不會(huì)互相嵌套,如下面的代碼所示,task1 和 task2 是按序被保護(hù)的,因此 enter_critical() 和 exit_critical() 這兩個(gè)臨界區(qū)保護(hù)函數(shù)總是嚴(yán)格地成對(duì)執(zhí)行:
?
void?critical_section_test(void)
{
????//?進(jìn)入臨界區(qū)
????enter_critical();
????//?做受保護(hù)的任務(wù)1
????do_task1();
????//?退出臨界區(qū)
????exit_critical();
????//?進(jìn)入臨界區(qū)
????enter_critical();
????//?做受保護(hù)的任務(wù)2,與任務(wù)1無關(guān)聯(lián)
????do_task2();
????//?退出臨界區(qū)
????exit_critical();
}
?
第二種場(chǎng)景就是多個(gè)任務(wù)間可能有關(guān)聯(lián),會(huì)存在嵌套情況,如下面的代碼所示,task2 是 task1 的一個(gè)子任務(wù),這種情況下,你會(huì)發(fā)現(xiàn)實(shí)際上是先執(zhí)行兩次 enter_critical(),然后再執(zhí)行兩次 exit_critical()。需要注意的是 task1 里面的子任務(wù) task3 雖然沒有像子任務(wù) task2 那樣被主動(dòng)加一層保護(hù),但由于主任務(wù) task1 整體是受保護(hù)的,因此子任務(wù) task3 也應(yīng)該是受保護(hù)的。
?
void?do_task1(void)
{
????//?進(jìn)入臨界區(qū)
????enter_critical();
????//?做受保護(hù)的任務(wù)2,是任務(wù)1中的子任務(wù)
????do_task2();
????//?退出臨界區(qū)
????exit_critical();?
????//?做任務(wù)3
????do_task3();
}
void?critical_section_test(void)
{
????//?進(jìn)入臨界區(qū)
????enter_critical();
????//?做受保護(hù)的任務(wù)1
????do_task1();
????//?退出臨界區(qū)
????exit_critical();
}
?
二、臨界區(qū)保護(hù)三種實(shí)現(xiàn)
上面的臨界區(qū)保護(hù)測(cè)試場(chǎng)景很清楚了,現(xiàn)在到 enter_critical()、exit_critical() 這對(duì)臨界區(qū)保護(hù)函數(shù)的實(shí)現(xiàn)環(huán)節(jié)了:
2.1 入門做法
首先是非常入門的做法,直接就是對(duì)系統(tǒng)全局中斷控制函數(shù) __disable_irq()、__enable_irq() 的封裝。回到上一節(jié)的測(cè)試場(chǎng)景里,這種實(shí)現(xiàn)可以很好地應(yīng)對(duì)非嵌套型任務(wù)的保護(hù),但是對(duì)于互相嵌套的任務(wù)保護(hù)就失效了。上一節(jié)測(cè)試代碼里,task3 應(yīng)該也要受到保護(hù)的,但實(shí)際上并沒有被保護(hù),因?yàn)榫o接著 task2 后面的 exit_critical() 直接就打開了系統(tǒng)全局中斷。
?
void?enter_critical(void)
{
????//?關(guān)閉系統(tǒng)全局中斷
????__disable_irq();
}
void?exit_critical(void)
{
????//?打開系統(tǒng)全局中斷
????__enable_irq();
}
?
2.2 改進(jìn)做法
針對(duì)入門做法,可不可以改進(jìn)呢?當(dāng)然可以,我們只需要加一個(gè)全局變量 s_lockObject 來實(shí)時(shí)記錄當(dāng)前已進(jìn)入的臨界區(qū)保護(hù)的次數(shù),即如下代碼所示。每調(diào)用一次 enter_critical() 都會(huì)直接關(guān)閉系統(tǒng)全局中斷(保證臨界區(qū)一定是受保護(hù)的),并記錄次數(shù),而調(diào)用 exit_critical() 時(shí)僅當(dāng)當(dāng)前次數(shù)是 1 時(shí)(即當(dāng)前不是臨界區(qū)保護(hù)嵌套情況),才會(huì)打開系統(tǒng)全局中斷,否則只是抵消一次進(jìn)入臨界區(qū)次數(shù)而已。改進(jìn)后的實(shí)現(xiàn)顯然可以保護(hù)上一節(jié)測(cè)試代碼里的 task3 了。
?
static?uint32_t?s_lockObject; void?init_critical(void) { ????__disable_irq(); ????//?清零計(jì)數(shù)器 ????s_lockObject?=?0; ????__enable_irq(); } void?enter_critical(void) { ????//?關(guān)閉系統(tǒng)全局中斷 ????__disable_irq(); ????//?計(jì)數(shù)器加?1 ????++s_lockObject; } void?exit_critical(void) { ????if?(s_lockObject?<=?1) ????{ ????????//?僅當(dāng)計(jì)數(shù)器不大于?1?時(shí),才打開系統(tǒng)全局中斷,并清零計(jì)數(shù)器 ????????s_lockObject?=?0; ????????__enable_irq(); ????} ????else ????{ ????????//?當(dāng)計(jì)數(shù)器大于?1?時(shí),直接計(jì)數(shù)器減?1?即可 ????????--s_lockObject; ????} }
?
2.3 終極做法
上面的改進(jìn)做法雖然解決了臨界區(qū)任務(wù)嵌套保護(hù)的問題,但是增加了一個(gè)全局變量和一個(gè)初始化函數(shù),實(shí)現(xiàn)不夠優(yōu)雅,并且嵌入式系統(tǒng)里全局變量極容易被篡改,存在一定風(fēng)險(xiǎn),有沒有更好的實(shí)現(xiàn)呢?當(dāng)然有,這要借助 Cortex-M 處理器內(nèi)核的特殊屏蔽寄存器 PRIMASK,下面是 PRIMASK 寄存器位定義(取自 ARMv7-M 手冊(cè)),其僅有最低位 PM 是有效的,當(dāng) PRIMASK[PM] 為 1 時(shí),系統(tǒng)全局中斷是關(guān)閉的(將執(zhí)行優(yōu)先級(jí)提高到 0x0/0x80);當(dāng) PRIMASK[PM] 為 0 時(shí),系統(tǒng)全局中斷是打開的(對(duì)執(zhí)行優(yōu)先級(jí)無影響)。
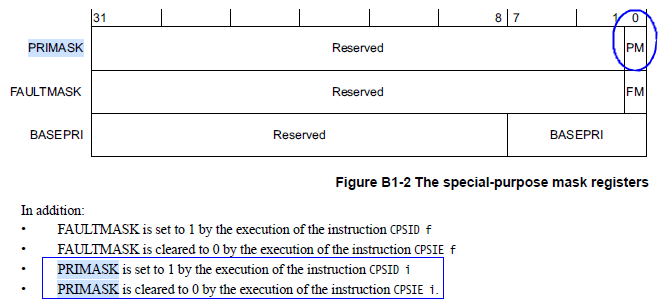
看到這,你應(yīng)該明白了 __disable_irq()、__enable_irq() 功能其實(shí)就是操作 PRIMASK 寄存器實(shí)現(xiàn)的。既然 PRIMASK 寄存器控制也保存了系統(tǒng)全局中斷的開關(guān)狀態(tài),我們可以通過獲取 PRIMASK 值來替代上面改進(jìn)做法里的全局變量 s_lockObject 的功能,代碼實(shí)現(xiàn)如下:
?
uint32_t?enter_critical(void)
{
????//?保存當(dāng)前?PRIMASK?值
????uint32_t?regPrimask?=?__get_PRIMASK();
????//?關(guān)閉系統(tǒng)全局中斷(其實(shí)就是將?PRIMASK?設(shè)為?1)
????__disable_irq();
????return?regPrimask;
}
void?exit_critical(uint32_t?primask)
{
????//?恢復(fù)?PRIMASK
????__set_PRIMASK(primask);
}
?
因?yàn)?enter_critical()、exit_critical() 函數(shù)原型有所變化,因此使用上也要相應(yīng)改變下:
?
void?critical_section_test(void)
{
????//?進(jìn)入臨界區(qū)
????uint32_t?primask?=?enter_critical();
????//?做受保護(hù)的任務(wù)
????do_task();
????//?退出臨界區(qū)
????exit_critical(primask);
????//?...
}
?
附錄、PRIMASK寄存器設(shè)置函數(shù)在各 IDE 下實(shí)現(xiàn)
?
//////////////////////////////////////////////////////
//?IAR?環(huán)境下實(shí)現(xiàn)(見?cmsis_iccarm.h?文件)
#define?__set_PRIMASK(VALUE)????????(__arm_wsr("PRIMASK",?(VALUE)))
#define?__get_PRIMASK()?????????????(__arm_rsr("PRIMASK"))
//////////////////////////////////////////////////////
//?Keil?環(huán)境下實(shí)現(xiàn)(見?cmsis_armclang.h?文件)
__STATIC_FORCEINLINE?void?__set_PRIMASK(uint32_t?priMask)
{
??__ASM?volatile?("MSR?primask,?%0"?:?:?"r"?(priMask)?:?"memory");
}
__STATIC_FORCEINLINE?uint32_t?__get_PRIMASK(void)
{
??uint32_t?result;
??__ASM?volatile?("MRS?%0,?primask"?:?"=r"?(result)?);
??return(result);
}
?
分享完畢,希望對(duì)你有所幫助。
審核編輯:劉清











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論