可利用 Artix-7 FPGA 和 Xilinx 機(jī)器視覺(jué)合作伙伴 Sensor to Image 的 IP 實(shí)現(xiàn)多標(biāo)準(zhǔn)的可擴(kuò)展攝像機(jī)平臺(tái),與之前的工業(yè)攝像機(jī)設(shè)計(jì)相比,其具有最佳的功率性能、最低的功耗和更低的總體 BOM 成本。
2014-12-31 11:04:34 1401
1401 
攝像機(jī)標(biāo)定是什么?如何對(duì)攝像機(jī)標(biāo)定進(jìn)行分類?傳統(tǒng)攝像機(jī)標(biāo)定方法分為哪些?攝像機(jī)自標(biāo)定方法有哪些?
2021-04-13 06:10:19
DVR攝像機(jī)的同步方式一般有內(nèi)同步、電源同步和外同步。 內(nèi)同步(INT)是利用攝像機(jī)內(nèi)部的晶體振蕩電路產(chǎn)生同步信號(hào)來(lái)完成操作。電源同步(LL,Line Locked),也稱之為線性鎖定或行鎖定
2011-03-04 11:04:24
在機(jī)器視覺(jué)中,怎么標(biāo)定坐標(biāo)原點(diǎn)啊,我用的圖像匹配可以標(biāo)定一個(gè)坐標(biāo)原點(diǎn),但是在不同的圖像上會(huì)有偏移,怎么才能減小偏移呢。求大家指教一下
2013-01-18 15:53:54
針對(duì)機(jī)器視覺(jué)中獲取圖像的硬件部分(如照明、鏡頭、攝像機(jī)及攝像機(jī)與計(jì)算機(jī)的接口)介紹,并詳細(xì)講解機(jī)器視覺(jué)在現(xiàn)實(shí)中的應(yīng)用。本書為中英雙語(yǔ)版,是一本充分介紹機(jī)器視覺(jué)硬件各個(gè)部分的理論基礎(chǔ)及算法,同時(shí)提供
2019-03-28 18:18:09
或漏裝。一般采用人工目測(cè)方法檢查,誤差大、可靠性差,不能滿足自動(dòng)化生產(chǎn)的需要。基于機(jī)器視覺(jué)的智能集成測(cè)試系統(tǒng),改變了這種現(xiàn)狀,實(shí)現(xiàn)了對(duì)儀表板總成智能化、全自動(dòng)、高精度、快速化的質(zhì)量檢測(cè),克服了人工檢測(cè)
2015-11-18 19:21:04
本帖最后由 lilin0734 于 2017-11-15 20:09 編輯
機(jī)器視覺(jué)手眼標(biāo)定
2017-11-06 10:45:41
系統(tǒng)或I/O系統(tǒng)執(zhí)行相應(yīng)的控制動(dòng)作(如定位和分類)。 機(jī)器視覺(jué)是新興的自動(dòng)化市場(chǎng),之所以這么說(shuō),主要機(jī)器視覺(jué)技術(shù)實(shí)際上就是利用攝像機(jī)替代人眼,圖像處理軟件替代大腦對(duì)生產(chǎn)線上產(chǎn)品進(jìn)行質(zhì)量檢驗(yàn)或識(shí)別,它
2014-03-13 10:21:47
2.1 照明2.1.1 電磁輻射2.1.2 光源類型2.1.3 光與被測(cè)物間的相互作用2.1.4 利用照明的光譜2.1.5 利用照明的方向性2.2 鏡頭2.2.1 針孔攝像機(jī)2.2.2 高斯光學(xué)2.2.3
2016-06-29 13:48:38
是攝像機(jī)、轉(zhuǎn)鼓等,它們都把三維的影像作為輸入源,即輸入計(jì)算機(jī)的就是三維管觀世界的二維投影。如果把三維客觀世界到二維投影像看作是一種正變換的話,則機(jī)器視覺(jué)系統(tǒng)所要做的是從這種二維投影圖像到三維客觀世界
2019-07-08 08:30:00
技術(shù)的迅速發(fā)展,越來(lái)越多的研究者采用攝像機(jī)作為全自主用移動(dòng)機(jī)器人的感知傳感器。這主要是因?yàn)樵瓉?lái)的超聲或紅外傳感器感知信息量有限,魯棒性差,而視覺(jué)系統(tǒng)則可以彌補(bǔ)這些缺點(diǎn)。而現(xiàn)實(shí)世界是三維的,而投射于攝像
2019-06-08 08:30:00
1. 什么是CCD攝像機(jī)? CCD是Charge Coupled Device(電荷耦合器件)的縮寫,它是一種半導(dǎo)體成像器件,因而具有靈敏度高、抗強(qiáng)光、畸變小、體積小、壽命長(zhǎng)、抗震動(dòng)等優(yōu)點(diǎn)
2008-06-16 15:10:19
MS41908M 網(wǎng)絡(luò)攝像機(jī)·監(jiān)控攝像機(jī)用鏡頭驅(qū)動(dòng)芯片(內(nèi)置光圈控制)MS41908M 是一款用于網(wǎng)絡(luò)攝像機(jī)和監(jiān)控攝像機(jī)的鏡頭驅(qū)動(dòng)芯片。 芯片內(nèi)置光圈控制功能;通過(guò)電壓驅(qū)動(dòng)方式以及扭矩紋波修正技術(shù)
2021-02-28 14:29:36
``【課程推薦】龍哥手把手教你學(xué)LabVIEW機(jī)器視覺(jué)設(shè)計(jì)教程請(qǐng)問(wèn)哪位大神有Labview機(jī)器視覺(jué)相機(jī)標(biāo)定的程序文件,麻煩分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
的USB攝像機(jī)主要就是高分辨率和高幀率的USB3.0以及低分辨率的USB2.0。USB攝像機(jī)的方案主要分為三類:FPGA架構(gòu),ARM架構(gòu),單片機(jī)架構(gòu)。FPGA架構(gòu)的USB攝像機(jī)是從機(jī)器視覺(jué)相機(jī)中發(fā)展而來(lái),主要是由于FPGA的靈活性,能應(yīng)對(duì)機(jī)器視覺(jué)對(duì)單一環(huán)境,獲取較好的圖像效果,同時(shí)...
2022-02-17 07:21:11
輔助實(shí)現(xiàn);也有廠家采取AP/STA切換工作狀態(tài)的方法;本文將討論一個(gè)更加簡(jiǎn)便的方法:ZeroLink技術(shù)。無(wú)須額外增加設(shè)備,無(wú)須切換WiFi工作狀態(tài),利用網(wǎng)絡(luò)攝像機(jī)本身自帶的WiFi,結(jié)合ios或者
2015-08-09 12:08:04
求教,怎么用labview控制攝像機(jī)啊,控制攝像機(jī)的拍攝,傳輸圖片,讀取圖片
2011-09-28 15:25:20
OpenMV項(xiàng)目旨在通過(guò)開(kāi)發(fā)開(kāi)源的低成本機(jī)器視覺(jué)攝像機(jī),為業(yè)余愛(ài)好者和制造商提供機(jī)器視覺(jué)。第一代OpenMV攝像機(jī)基于STM32F ARM Cortex-M MCU和Omnivision
2020-09-29 14:49:30
雙目視覺(jué)的原理:由于視差原理,左右兩個(gè)ccd的位置固定,若能測(cè)量空間中同一個(gè)點(diǎn)P在左右兩個(gè)ccd中圖像的位置,則根據(jù)三角原理,可以求得P點(diǎn)在空間中的坐標(biāo)位置。可用于攝像頭實(shí)現(xiàn)空間點(diǎn)的距離測(cè)量。下圖
2021-09-27 16:52:18
雙目立體視覺(jué)(BinocularStereoVision)是機(jī)器視覺(jué)的一種重要形式,因其可簡(jiǎn)單地利用左右攝像機(jī)中的圖像信息計(jì)算得到相機(jī)視野中物體相對(duì)于攝像機(jī)的深度信息使得該技術(shù)擁有廣泛的應(yīng)用前景
2021-12-23 07:19:52
檢測(cè)器探測(cè)到物體已經(jīng)運(yùn)動(dòng)至接近攝像系統(tǒng)的視野中心,向圖像采集部分發(fā)送觸發(fā)脈沖;2、圖像采集部分按照事先設(shè)定的程序和延時(shí),分別向攝像機(jī)和照明系統(tǒng)發(fā)出啟 動(dòng)脈沖;3、攝像機(jī)停止目前的掃描,重新開(kāi)始新的一幀
2021-12-20 14:41:05
機(jī)器視覺(jué)是工業(yè)自動(dòng)化的“眼睛”,主要由工業(yè)攝像機(jī)、光源、工控機(jī)以及相應(yīng)的圖像分析軟件系統(tǒng)組成。在機(jī)器視覺(jué)行業(yè)中,工控機(jī)的性能直接影響整個(gè)視覺(jué)系統(tǒng)的處理速度和運(yùn)行時(shí)間,是整個(gè)視覺(jué)系統(tǒng)的關(guān)鍵,特別是對(duì)于
2021-11-10 14:02:02
表面的三維信息和由攝像機(jī)成像的幾何模型;(3)獲取和發(fā)送目標(biāo)點(diǎn)的坐標(biāo)視覺(jué)定位系統(tǒng)的目標(biāo)就是為了找出目標(biāo)物在工業(yè)機(jī)器人的基礎(chǔ)坐標(biāo)系上的坐標(biāo),然后把攝像機(jī)獲得的標(biāo)定與圖像在工業(yè)機(jī)器人的基礎(chǔ)坐標(biāo)系上的坐標(biāo)聯(lián)系起來(lái)
2021-11-17 11:27:44
不依賴于標(biāo)定參照物,僅利用攝像機(jī)在運(yùn)動(dòng)過(guò)程中周圍環(huán)境圖像與圖像之間的對(duì)應(yīng)關(guān)系來(lái)對(duì)攝像機(jī)進(jìn)行的標(biāo)定的方法稱為攝像機(jī)自標(biāo)定方法。目前已有的自標(biāo)定技術(shù)大致可以分為基于主動(dòng)視覺(jué)的攝像機(jī)自標(biāo)定技術(shù)、直接求解
2019-06-04 08:00:00
本系統(tǒng)搭建了基于單目視覺(jué)的SCARA機(jī)器人硬件平臺(tái),并使用圓形供料盤混合投放多種顏色的保險(xiǎn)片,利用CCD攝像機(jī)獲取保險(xiǎn)片的圖像信息,從圖像中提取其輪廓形狀及坐標(biāo)信息,并利用攝像機(jī)參數(shù)標(biāo)定,通過(guò)坐標(biāo)變換得到保險(xiǎn)片在機(jī)器人坐標(biāo)系的空間坐標(biāo),然后控制SCARA機(jī)器人夾爪對(duì)保險(xiǎn)片工件進(jìn)行精確定位和抓取。
2019-06-19 06:30:00
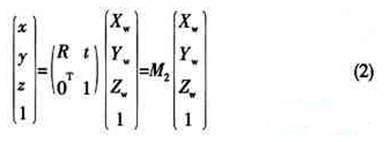
參數(shù)在計(jì)算機(jī)標(biāo)定的時(shí)候計(jì)算出來(lái)即可,其矩陣表示如下: 以上就是整個(gè)攝像機(jī)標(biāo)定的基本原理和相關(guān)概念,在機(jī)器3D視覺(jué)計(jì)算中,先要通過(guò)標(biāo)定確定這些參數(shù),通常的做法是通過(guò)一些包含了非常明顯的圖案樣本(棋盤
2018-09-28 10:32:24
統(tǒng)采用Gige Vision攝像機(jī)來(lái)獲取圖像,在FPGA中采用了Gige Vision IP核,根據(jù)TCP/IP傳送協(xié)議實(shí)現(xiàn)了FPGA與PC機(jī)的數(shù)據(jù)通訊。1 FPGA實(shí)現(xiàn)機(jī)器視覺(jué)的優(yōu)勢(shì) 隨著機(jī)器視覺(jué)
2013-09-04 12:14:55
利用LABVIEW視覺(jué)模塊完成攝像機(jī)標(biāo)定,一般需要哪些vi?相關(guān)參數(shù)怎么設(shè)置?
2015-05-17 17:24:58
如何利用WT-ESP32_CAM去獲取攝像機(jī)里的圖片呢?怎樣去編寫其代碼呢?
2022-01-14 06:27:50
CCD檢測(cè)方法是什么?如何去劃分CCD攝像機(jī)?有什么依據(jù)?
2021-05-08 06:38:10
的2D視覺(jué)系統(tǒng)已經(jīng)可以定位大多數(shù)堆疊于箱柜內(nèi)部隔板頂層的部件。 這種應(yīng)用一般的方法就是使用一個(gè)安裝在箱柜上的攝像機(jī)來(lái)定位部件。攝像機(jī)安裝在足夠的高度,因此機(jī)器人可以在攝像機(jī)底下移動(dòng)并進(jìn)入箱柜內(nèi)部。在每
2018-10-26 16:31:33
CCD彩色攝像機(jī)的可調(diào)整功能 :(1)同步方式的選擇A、對(duì)單臺(tái)彩色攝像機(jī)而言,主要的同步方式有下列三種:內(nèi)同步——利用彩色攝像機(jī)內(nèi)部的晶體振蕩電路產(chǎn)生同步信號(hào)來(lái)完成操作。外同步——利用一個(gè)外同步信號(hào)
2008-08-18 15:42:30
系統(tǒng)的主要工作步驟分為以下幾點(diǎn):1.工件定位檢測(cè)器探測(cè)到物體已經(jīng)運(yùn)動(dòng)至接近攝像系統(tǒng)的視野中心,向圖像采集部分發(fā)送觸發(fā)脈沖。2.圖像采集部分按照事先設(shè)定的程序和延時(shí),分別向攝像機(jī)和照明系統(tǒng)發(fā)出啟動(dòng)
2021-04-19 10:25:16
的特征點(diǎn)也能夠獲取目標(biāo)的位置等信息。此方法須保證該組特征點(diǎn)在不同坐標(biāo)系下的位置關(guān)系一致, 而對(duì)于一般的雙目視覺(jué)系統(tǒng), 坐標(biāo)的計(jì)算誤差往往會(huì)破壞這種關(guān)系。 采用在機(jī)器人上安裝車載攝像機(jī)這種局部視覺(jué)定位
2019-06-01 08:00:00
解決這些問(wèn)題。接下來(lái)將簡(jiǎn)介一些特色化攝像機(jī)的技術(shù)。 紅外攝像機(jī)技術(shù)原理 紅外攝像技術(shù)分為被動(dòng)紅外攝像技術(shù)和主動(dòng)紅外攝像技術(shù)。被動(dòng)紅外攝像技術(shù)是利用任何物質(zhì)在絕對(duì)零度以上都有紅外光發(fā)射,人體和熱機(jī)
2009-02-05 15:46:08
什么是攝像機(jī)的光譜響應(yīng)特性?攝像機(jī)的數(shù)字信號(hào)(DSP)處理指的是什么?什么是攝像機(jī)的曝光量?什么是攝像機(jī)的最低照度?什么是攝像機(jī)的數(shù)字變焦?
2021-10-09 07:56:24
對(duì)單臺(tái)監(jiān)控攝像機(jī)而言,主要的同步方式有下列三種: 內(nèi)同步--利用監(jiān)控攝像機(jī)內(nèi)部的晶體振蕩電路產(chǎn)生同步信號(hào)來(lái)完成操作
2008-10-06 16:44:24
紅外攝像機(jī)技術(shù)分為被動(dòng)紅外攝像技術(shù)和主動(dòng)紅外攝像技術(shù)。 被動(dòng)紅外攝像機(jī)技術(shù)是利用任何物質(zhì)在絕對(duì)零度(-273℃)以上都發(fā)射紅外光的原理,人體和熱機(jī)發(fā)出的紅外光較強(qiáng),其它物體發(fā)出的紅外光相對(duì)微弱,利用
2008-08-26 10:21:28
攝像機(jī)只需將其連接到最近的網(wǎng)絡(luò),并分配一個(gè)IP地址就可以。它可以利用現(xiàn)有的網(wǎng)絡(luò)作為傳輸平臺(tái),不用去布線; 模擬攝像機(jī)需要將同軸電纜連接到每一臺(tái)攝像機(jī),并連接到控制平臺(tái)、錄像設(shè)備、顯示設(shè)備上,每增加
2020-12-11 14:22:45
,在考慮實(shí)際情況下,正確安裝鏡頭、連通信號(hào)電纜,接通電源即可。如果沒(méi)有正確地安裝鏡頭并調(diào)整攝像機(jī)及鏡頭的狀態(tài),就會(huì)很影響到系統(tǒng)的性能,達(dá)不到預(yù)期的效果。下文詳細(xì)闡述網(wǎng)絡(luò)攝像機(jī)的安裝方法和一些注意事項(xiàng)
2009-05-26 09:50:52
網(wǎng)絡(luò)攝像機(jī) 是一種結(jié)合傳統(tǒng)攝像機(jī)與網(wǎng)絡(luò)技術(shù)所產(chǎn)生的新一代攝像機(jī),它可以將影像通過(guò)網(wǎng)絡(luò)傳至有網(wǎng)絡(luò)連接端口的另一端,且遠(yuǎn)端的瀏覽者不需用任何專業(yè)軟件,只要標(biāo)準(zhǔn)的網(wǎng)絡(luò)瀏覽器(如“Microsoft IE或
2008-12-29 14:11:49
(http://www.ztwl.cn/)網(wǎng)絡(luò)攝像機(jī)網(wǎng)絡(luò)攝像機(jī)就是擁有獨(dú)立的IP地址和嵌入式的操作系統(tǒng)從而實(shí)現(xiàn)網(wǎng)絡(luò)監(jiān)控的智能化產(chǎn)品。輕此又被叫做IP 攝像機(jī)或IP CAMERA。 它可以通過(guò)LAN
2009-05-26 09:57:13
130萬(wàn)高清網(wǎng)絡(luò)全景
攝像機(jī) 360度魚眼網(wǎng)絡(luò)
攝像機(jī)畫面出現(xiàn)花屏還有軟件打開(kāi)時(shí)出現(xiàn)卡死狀態(tài)是什么原因?qū)е碌模壳蠼?/div>
2020-10-22 22:14:09
,并用到移動(dòng)機(jī)器人中,取得了較好的效果,三目視覺(jué)系統(tǒng)的優(yōu)點(diǎn)是充分利用了第三個(gè)攝像機(jī)的信息,減少了錯(cuò)誤匹配,解決了雙目視覺(jué)系統(tǒng)匹配的多義性,提高了定位精度,但三目視覺(jué)系統(tǒng)要合理安置三個(gè)攝像機(jī)的相對(duì)位置,其
2018-12-13 21:23:57
3D 點(diǎn)云。高度差異化 3D 機(jī)器視覺(jué)系統(tǒng)利用 DLP?(...)主要特色 集成型 API 和針對(duì) DLP 芯片組的驅(qū)動(dòng)程序支持,可實(shí)現(xiàn)快速以及可編程圖形針對(duì)同步捕捉的集成型攝像機(jī)支持投影儀和攝像機(jī)校準(zhǔn)例程用于生成視差圖、景深圖和點(diǎn)云的結(jié)構(gòu)光算法API 文檔應(yīng)用和源代碼的完全訪問(wèn)權(quán)限
2018-10-12 15:33:03
描述 3D 機(jī)器視覺(jué)參考設(shè)計(jì)采用德州儀器 (TI) 的 DLP 軟件開(kāi)發(fā)套件 (SDK),使得開(kāi)發(fā)人員可以通過(guò)將 TI 的數(shù)字微鏡器件 (DMD) 技術(shù)與攝像頭、傳感器、電機(jī)和其他外設(shè)集成來(lái)輕松構(gòu)建
2022-09-22 10:20:04
本應(yīng)用筆記介紹了安全視頻監(jiān)控系統(tǒng)中高級(jí)互聯(lián)網(wǎng)協(xié)議(IP)攝像機(jī)與模擬攝像機(jī)的應(yīng)用差異。
2021-06-02 06:36:00
光學(xué)標(biāo)定板應(yīng)用領(lǐng)域宏誠(chéng)光學(xué)玻璃系列標(biāo)定板和陶瓷系列標(biāo)定板是專為高校實(shí)驗(yàn)、研究單位項(xiàng)目研發(fā)和機(jī)器視覺(jué)集成商產(chǎn)品標(biāo)定等等客戶群體使用的常用標(biāo)定工具,能夠方便獲得相機(jī)的標(biāo)定數(shù)據(jù)。標(biāo)定板作用:為校正鏡頭畸變
2022-09-20 08:14:32
利用空間直線的中心折反射投影的特性對(duì)全維視覺(jué)系統(tǒng)的標(biāo)定方法進(jìn)行了研究。應(yīng)用光線追跡法提取空間直線折反射圖像上的點(diǎn),并提出一種基于最小二乘理論的二次曲線擬合方法
2009-06-11 10:41:43 8
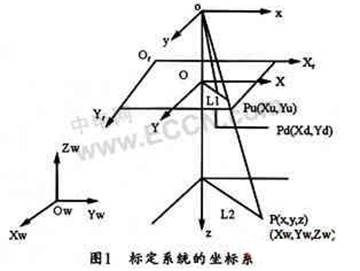
8 在計(jì)算機(jī)視覺(jué)中,二維計(jì)算機(jī)坐標(biāo)和三維物體空間坐標(biāo)的關(guān)系可通過(guò)攝像機(jī)模型來(lái)建立。模型中的參數(shù)包括:攝像機(jī)幾何、光學(xué)特性參數(shù)(內(nèi)參數(shù))及攝像機(jī)空間位置參數(shù)(外參
2009-08-05 15:29:1641 本文給出了robocup 中型組足球比賽機(jī)器人在全維視覺(jué)情況下,對(duì)足球比賽中目標(biāo)定位的一種方法。文中推導(dǎo)了一種針對(duì)全向攝像機(jī)鏡面投影的變換關(guān)系,該方法簡(jiǎn)單有效,為全維
2009-08-14 09:37:3921 本文給出了robocup 中型組足球比賽機(jī)器人在全維視覺(jué)情況下,對(duì)足球比賽中目標(biāo)定位的一種方法。文中推導(dǎo)了一種針對(duì)全向攝像機(jī)鏡面投影的變換關(guān)系,該方法簡(jiǎn)單有效,為全維
2009-08-14 09:38:448 天津機(jī)器視覺(jué)非標(biāo)定制,天津計(jì)算機(jī)視覺(jué),芯片分選檢測(cè)機(jī)全自動(dòng)上下料、分選芯片
2023-02-21 10:26:40
基于視覺(jué)系統(tǒng)的移動(dòng)機(jī)器人導(dǎo)航技術(shù)是近年來(lái)移動(dòng)機(jī)器人研究領(lǐng)域的一個(gè)熱點(diǎn),而攝像機(jī)標(biāo)定是視覺(jué)系統(tǒng)的基礎(chǔ),它建立了攝像機(jī)系統(tǒng)尺寸(像素)和已知的三維世界坐標(biāo)系系統(tǒng)
2010-01-20 14:08:3738 視覺(jué)傳感器的標(biāo)定技術(shù)
雙目視覺(jué)傳感器由兩臺(tái)性能相同的面陣CCD攝像機(jī)組成,基于立體視差的原理,可完
2009-11-07 11:42:011723 以簡(jiǎn)化以往的攝像機(jī)標(biāo)定技術(shù)為研究目的,分析了標(biāo)定算法對(duì)于前期圖像處理的要求,給出了基于MATLAB 的簡(jiǎn)易 攝像機(jī) 標(biāo)定方法。該方法借助于常用軟件完成了以往攝像機(jī)的標(biāo)定算法中的
2011-06-13 15:52:4039 采用直線對(duì)應(yīng)法和基于最小二乘的標(biāo)定方法對(duì)攝像機(jī)和光刀進(jìn)行標(biāo)定,設(shè)計(jì)并實(shí)現(xiàn)了三維掃描儀系統(tǒng)的標(biāo)定,經(jīng)試驗(yàn)表明,此方法簡(jiǎn)單易行,計(jì)算結(jié)果精度高,對(duì)數(shù)據(jù)測(cè)量的精確性和可
2011-10-10 10:38:4818 提出了基于平面單應(yīng)性矩陣的攝像機(jī)標(biāo)定算法,通過(guò)攝像機(jī)標(biāo)定對(duì)檢測(cè)區(qū)域進(jìn)行網(wǎng)格劃分,從而進(jìn)行車輛速度的檢測(cè)。經(jīng)實(shí)驗(yàn)測(cè)試,該方法易于實(shí)現(xiàn),且具有較高的檢測(cè)精度,平均測(cè)速準(zhǔn)確率
2011-11-10 14:35:3651 提出了一種改進(jìn)標(biāo)定法.該方法采用分步標(biāo)定的思想,以創(chuàng)建的平面模板為標(biāo)定物,利用共面點(diǎn)便可線性求解出攝像機(jī)的內(nèi)外參數(shù).建立的攝像機(jī)模型考慮了徑向畸變,有利于提高標(biāo)定精度
2012-04-26 15:29:2328 介紹了一種線性模型下的攝像機(jī)標(biāo)定方法。在獲取交通視頻的基礎(chǔ)上,利用實(shí)際路面上的參照物和圖像處理的基本知識(shí)抽象出交通視頻中的像素行和路面實(shí)際距離之間的幾何模型,對(duì)幾
2012-05-28 16:26:4743 本文介紹了一種線性模型下的攝像機(jī)標(biāo)定方法。在獲取交通視頻的基礎(chǔ)上,利用實(shí)際路面上的參照物和圖像處理的基本知識(shí)抽象出交通視頻中的像素行和路面實(shí)際距離之間的幾何模型,
2012-05-29 16:58:1283 基于B-dual-space的攝像機(jī)標(biāo)定
2015-11-18 16:40:220 提出一種新的機(jī)器人視覺(jué)伺服控制方法,該方法參照人的抓取動(dòng)作,首先根據(jù)物體在圖像中的位置信息,利用模糊邏輯將機(jī)器人的手爪移動(dòng)到物體附近,然后再根據(jù)物體當(dāng)前圖像和參考圖像之差,利用局部神經(jīng)網(wǎng)絡(luò)對(duì)手爪的位姿進(jìn)行精確調(diào)整。整個(gè)過(guò)程無(wú)需機(jī)器人和攝像機(jī)的標(biāo)定,能有效利用人的控制經(jīng)驗(yàn)。
2016-09-22 11:15:3416 本文CameraCalibrator類源代碼來(lái)自于OpenCV2 計(jì)算機(jī)視覺(jué)編程手冊(cè)(Robert Laganiere 著 張靜 譯) 強(qiáng)烈建議閱讀機(jī)器視覺(jué)學(xué)習(xí)筆記(4)——單目攝像機(jī)標(biāo)定參數(shù)
2017-02-08 03:36:38523 (4)——單目攝像機(jī)標(biāo)定參數(shù)說(shuō)明? 機(jī)器視覺(jué)學(xué)習(xí)筆記(5)——基于OpenCV的單目攝像機(jī)標(biāo)定? 機(jī)器視覺(jué)學(xué)習(xí)筆記(6)——雙目攝像機(jī)標(biāo)定參數(shù)說(shuō)明 1.雙目攝像機(jī)標(biāo)定目的 雙目攝像機(jī)標(biāo)定最主要的目的就是要得出左右兩個(gè)攝像機(jī)的相對(duì)位置關(guān)系,但是在OpenCV中,計(jì)算表示左右攝像機(jī)位置的矩陣R和T的同時(shí),也可
2017-02-08 03:41:12578 Dragoboard410c開(kāi)發(fā)板為平臺(tái)進(jìn)行簡(jiǎn)單的3D視覺(jué)實(shí)驗(yàn),這里我們將涉及到3D視覺(jué)中的攝像機(jī)標(biāo)定、姿勢(shì)估計(jì)、對(duì)極集合和3D圖像中的深度地圖等內(nèi)容。
2017-02-15 10:11:221695 混合攝像機(jī)視覺(jué)伺服機(jī)器人研究與應(yīng)用_陳丹
2017-03-19 19:07:040 攝像機(jī)標(biāo)定是機(jī)器視覺(jué)和攝像測(cè)量領(lǐng)域相對(duì)基礎(chǔ)的工作,同時(shí)也是最復(fù)雜、困難的T作。攝像機(jī)標(biāo)定的意義是得到立體空間中對(duì)象的幾何信息,其中所使用的圖像信息由雙目攝像機(jī)所得。定后的雙目攝像機(jī)得到的圖像目標(biāo)信息
2017-11-06 14:41:0530 問(wèn)題,、提出一種基于雙目視覺(jué)的投影儀標(biāo)定算法,將投影儀視為逆向相機(jī),利用一個(gè)輔助相機(jī)捕獲投影于不同位置標(biāo)定平面,確立攝像機(jī)圖像與標(biāo)定平面之間的對(duì)應(yīng)關(guān)系,然后利用極線原理得到攝像機(jī)圖像與投影儀圖像之間的對(duì)應(yīng)關(guān)
2017-11-06 15:30:2120 使用LabVIEW和用于DENSO的ImagingLab Robotics庫(kù),機(jī)器視覺(jué)和機(jī)器人系統(tǒng)可以集成在一個(gè)應(yīng)用程序中。本文介紹了使用相同坐標(biāo)系統(tǒng)在機(jī)器視覺(jué)系統(tǒng)和機(jī)器人系統(tǒng)之間進(jìn)行標(biāo)定的方法
2017-11-17 17:03:2512638 機(jī)器視覺(jué)的基本任務(wù)之一是從攝像機(jī)獲取圖像信息并計(jì)算三維空間中物體的幾何信息,以由此重建和識(shí)別物體。而空間物體表面 某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系是由攝像機(jī)成像的幾何模型決定
2017-11-17 17:53:3814884 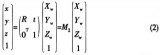
攝像機(jī)標(biāo)定是三維重建時(shí)的必要步驟。傳統(tǒng)的標(biāo)定方法對(duì)設(shè)備要求高、操作繁瑣,而自標(biāo)定方法雖然簡(jiǎn)便,但精度不高,會(huì)嚴(yán)重影響三維重建的效果。因此,越來(lái)越需要一種操作簡(jiǎn)便并且精度高的自標(biāo)定方法。采用SIFT
2017-11-21 15:01:163 針對(duì)自由雙目立體視覺(jué)中由于攝像機(jī)旋轉(zhuǎn)導(dǎo)致的攝像機(jī)外參數(shù)變化的問(wèn)題,提出一種基于旋轉(zhuǎn)軸標(biāo)定的動(dòng)態(tài)外參數(shù)獲取方法。在多個(gè)不同位置,立體標(biāo)定得到多組旋轉(zhuǎn)平移矩陣,利用最小二乘法求解旋轉(zhuǎn)軸參數(shù);結(jié)合初始位置
2017-11-25 11:27:150 針對(duì)目前基于視頻的車輛測(cè)速方法均需通過(guò)手工標(biāo)定而造成的低效和可操作性差的問(wèn)題,提出了一種對(duì)典型配置的道路監(jiān)控攝像機(jī)的焦距、俯仰角、離地距離等重要參數(shù)進(jìn)行自動(dòng)標(biāo)定的方法。首選利用自然場(chǎng)景中兩組正交
2017-11-29 16:47:580 針對(duì)無(wú)人車(UGV)自主跟隨目標(biāo)車輛檢測(cè)過(guò)程中需要對(duì)激光雷達(dá)(LiDAR)數(shù)據(jù)和攝像機(jī)圖像進(jìn)行信息融合的問(wèn)題,提出了一種基于梯形棋盤格標(biāo)定板對(duì)激光雷達(dá)和攝像機(jī)進(jìn)行聯(lián)合標(biāo)定的方法。首先,利用激光雷達(dá)
2017-11-30 16:23:127 為提高場(chǎng)景攝像機(jī)的標(biāo)定精度和標(biāo)定效率,本文利用攝像機(jī)透鏡成像原理,基于針孔成像模型,提出了一種基于單幅二維圖像的攝像機(jī)標(biāo)定方法。該方法利用最小二乘法直接計(jì)算世界坐標(biāo)系與計(jì)算機(jī)圖像坐標(biāo)系之間的數(shù)學(xué)模型
2017-12-15 11:04:185 針對(duì)借助激光跟蹤儀標(biāo)定機(jī)器人所涉及的坐標(biāo)系統(tǒng)一問(wèn)題,對(duì)基于空間幾何法擬合建立的基坐標(biāo)系與機(jī)器人理論基坐標(biāo)系的轉(zhuǎn)換關(guān)系進(jìn)行了研究,提出了一種基于對(duì)偶四元數(shù)法的機(jī)器人基坐標(biāo)系標(biāo)定方法。利用指數(shù)積公式推導(dǎo)
2018-03-07 10:43:522 防暴攝像機(jī)又稱高安全性攝像機(jī)、抗沖擊攝像機(jī)、抗打擊攝像機(jī)、防破壞型攝像機(jī)。顧名思義,防暴攝像機(jī)就是在外來(lái)暴力打擊下仍然可以保證部件正常工作的攝像機(jī),特點(diǎn)就是其外殼具有很強(qiáng)的抗沖擊能力。本視頻主要詳細(xì)介紹了防爆攝像機(jī)安裝方法。
2018-11-24 09:48:238950 雙目立體視覺(jué)中在對(duì)物體進(jìn)行三維測(cè)量或精準(zhǔn)定位時(shí),需要對(duì)攝像機(jī)進(jìn)行標(biāo)定以獲得其內(nèi)外參數(shù)。研究徑向畸變攝像機(jī)模型,構(gòu)造了基于一階徑向畸變( RAC)算法的雙目攝像機(jī)內(nèi)外參數(shù)線性求解公式。考慮側(cè)傾角、旋轉(zhuǎn)
2018-12-27 17:04:5211 建立攝像機(jī)的模型,在Tsai方法基礎(chǔ)上,改進(jìn)算法,對(duì)攝像機(jī)的內(nèi)、外部參數(shù)進(jìn)行了標(biāo)定。試驗(yàn)結(jié)果表明,該方法明顯好于傳統(tǒng)的Tsai方法,可以準(zhǔn)確得到水平方向不確定比例因素s。再結(jié)合Tsai方法,可以準(zhǔn)確獲得其余的標(biāo)定參數(shù)。
2019-10-31 16:20:055 采用張正友提出的基于2D平面棋盤格的攝像機(jī)標(biāo)定方法,利用Matlab攝像頭標(biāo)定工具完成相機(jī)參數(shù)的標(biāo)定。
2020-08-31 10:04:124714 
常見(jiàn)的機(jī)器人視覺(jué)伺服中要實(shí)現(xiàn)像素坐標(biāo)與實(shí)際坐標(biāo)的轉(zhuǎn)換,首先就要進(jìn)行標(biāo)定,對(duì)于實(shí)現(xiàn)視覺(jué)伺服控制,這里的標(biāo)定不僅包括攝像機(jī)標(biāo)定,也包括機(jī)器人系統(tǒng)的手眼標(biāo)定。
2020-09-10 16:40:233704 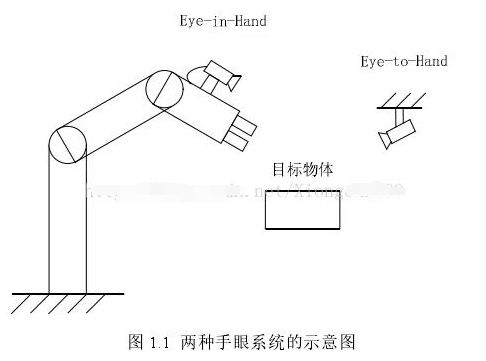
研究基于機(jī)器視覺(jué)的對(duì)刀方法。構(gòu)建由CCD模擬攝像機(jī)和視頻采集卡組成的圖像采集和處理系統(tǒng),利用labview控制平臺(tái)實(shí)現(xiàn)對(duì)加工點(diǎn)的獲取,進(jìn)而實(shí)現(xiàn)自動(dòng)對(duì)刀.
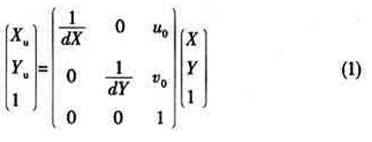
2020-11-05 14:53:3712 攝像機(jī)通過(guò)成像透鏡將三維場(chǎng)景投影到攝像機(jī)二維像平面上,這個(gè)投影可用成像變換(即攝像機(jī)成像模型)來(lái)描述。攝像機(jī)成像模型分為線形模型和非線性模型。針孔成像模型就屬于線形攝像機(jī)模型,本文就討論在這種模型
2022-11-07 15:22:34799 常見(jiàn)的機(jī)器人視覺(jué)伺服中要實(shí)現(xiàn)像素坐標(biāo)與實(shí)際坐標(biāo)的轉(zhuǎn)換,首先就要進(jìn)行標(biāo)定,對(duì)于實(shí)現(xiàn)視覺(jué)伺服控制,這里的標(biāo)定不僅包括攝像機(jī)標(biāo)定,也包括機(jī)器人系統(tǒng)的手眼標(biāo)定。 以常見(jiàn)的焊接機(jī)器人系統(tǒng)為例,有兩種構(gòu)型。
2023-02-06 15:24:211136 
一、為什么要進(jìn)行攝像機(jī)標(biāo)定 隨著機(jī)器視覺(jué)的迅猛發(fā)展,我們已經(jīng)不滿足于使用攝像機(jī)進(jìn)行監(jiān)控、抓拍這種較為簡(jiǎn)單的功能。更多的用戶青睞于它在非接觸三維尺寸測(cè)量上的應(yīng)用。我們所謂的三維測(cè)量是廣義的三維測(cè)量
2023-06-19 10:57:04975 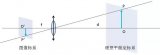
一、為什么要進(jìn)行攝像機(jī)標(biāo)定 隨著機(jī)器視覺(jué)的迅猛發(fā)展,我們已經(jīng)不滿足于使用攝像機(jī)進(jìn)行監(jiān)控、抓拍這種較為簡(jiǎn)單的功能。更多的用戶青睞于它在非接觸三維尺寸測(cè)量上的應(yīng)用。我們所謂的三維測(cè)量是廣義的三維測(cè)量
2023-06-20 11:00:03911 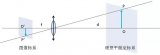
常見(jiàn)的機(jī)器人視覺(jué)伺服中要實(shí)現(xiàn)像素坐標(biāo)與實(shí)際坐標(biāo)的轉(zhuǎn)換,首先就要進(jìn)行標(biāo)定,對(duì)于實(shí)現(xiàn)視覺(jué)伺服控制,這里的標(biāo)定不僅包括攝像機(jī)標(biāo)定,也包括機(jī)器人系統(tǒng)的手眼標(biāo)定。
2023-08-04 11:48:47579 
對(duì)于攝像機(jī)標(biāo)定問(wèn)題已提出了很多方法,攝像機(jī)標(biāo)定的理論問(wèn)題已得到較好的解決,對(duì)攝像機(jī)標(biāo)定的研究來(lái)說(shuō),當(dāng)前的研究工作應(yīng)該集中在如何針對(duì)具體的實(shí)際應(yīng)用問(wèn)題,采用特定的簡(jiǎn)便、實(shí)用、快速、準(zhǔn)確的標(biāo)定方法。
2023-08-04 12:54:171386 
利用本質(zhì)矩陣和基本矩陣的攝像機(jī)標(biāo)定方法;利用主動(dòng)系統(tǒng)控制攝像機(jī)作特定運(yùn)動(dòng)的自標(biāo)定方法(主動(dòng)視覺(jué)標(biāo)定方法)。
2023-10-16 11:42:11253 
空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系是由攝像機(jī)成像的幾何模型決定的,這些幾何模型參數(shù)就是攝像機(jī)參數(shù),為了得到這些參數(shù)而進(jìn)行的實(shí)驗(yàn)與計(jì)算的過(guò)程稱為攝像機(jī)標(biāo)定。
2023-10-19 17:31:56542 
空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對(duì)應(yīng)點(diǎn)之間的相互關(guān)系是由攝像機(jī)成像的幾何模型決定的,這些幾何模型參數(shù)就是攝像機(jī)參數(shù),為了得到這些參數(shù)而進(jìn)行的實(shí)驗(yàn)與計(jì)算的過(guò)程稱為攝像機(jī)標(biāo)定。
2023-11-03 11:07:58479 
攝像機(jī)是機(jī)器視覺(jué)系統(tǒng)中的一個(gè)關(guān)鍵組件,其最本質(zhì)的功能就是將光信號(hào)轉(zhuǎn)變成為有序的電信號(hào)。選擇合適的攝像機(jī)也是機(jī)器視覺(jué)系統(tǒng)設(shè)計(jì)中的重要環(huán)節(jié),攝像機(jī)的不僅是直接決定所采集到的圖像分辨率、圖像質(zhì)量等,同時(shí)也與整全系統(tǒng)的運(yùn)行模式直接相關(guān)。
2024-01-19 09:23:37140 
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論