三自由度直升機(jī)的嵌入式控制系統(tǒng)
三自由度直升機(jī)可以應(yīng)用于飛行器控制系統(tǒng)的半實(shí)物仿真試驗(yàn)和性能測試等場合,用以模擬橫列式直升機(jī),即傾轉(zhuǎn)旋翼機(jī)的直升機(jī)狀
2010-02-06 09:10:13 1238
1238 
3自由度自動(dòng)控制機(jī)械手,試用好使!希望可以幫助到大家
2014-09-11 15:55:50
本人建立一個(gè)七自由度的整車模型,仿真時(shí)一直報(bào)錯(cuò),出現(xiàn)代數(shù)環(huán)的問題,歡迎小伙伴們來探討!我qq:1139471346
2016-11-22 12:54:59
硬件方面的電磁兼容性 電磁兼容性(EMC)包含系統(tǒng)的發(fā)射和敏感度兩方面的問題。假若干擾不能完全消除,也要使干擾減少到最小。如果一個(gè)DSP系統(tǒng)符合下面三個(gè)條件,則該系統(tǒng)是電磁兼容的。(1) 對其它系統(tǒng)不產(chǎn)生干擾;(2) 對其它系統(tǒng)的發(fā)射不敏感;(3) 對系統(tǒng)本身不產(chǎn)生干擾。
2019-07-25 06:31:45
之間進(jìn)行排列補(bǔ)償,對電壓變化、溫度變化及其它影響進(jìn)行校準(zhǔn),再在使用中對其進(jìn)行動(dòng)態(tài)補(bǔ)償,這些都是用戶透明的。 ADIS16365與其它iSensor 6自由度傳感器后向兼容,并支持快速的數(shù)據(jù)訪問接口
2018-11-16 15:56:38
本帖最后由 mr.pengyongche 于 2013-4-30 02:57 編輯
FPGA+DSP 在空中背景下運(yùn)動(dòng)目標(biāo)實(shí)時(shí)跟蹤系統(tǒng)中的應(yīng)用 摘要:針對電視跟蹤系統(tǒng)對飛行目標(biāo)的檢測與跟蹤受到速度瓶頸
2012-12-28 11:19:07
橫跨多重電子應(yīng)用領(lǐng)域、全球第一大消費(fèi)電子和便攜設(shè)備MEMS(微機(jī)電系統(tǒng))傳感器供應(yīng)商意法半導(dǎo)體進(jìn)一步擴(kuò)大MEMS產(chǎn)品組合,推出整合三軸線性運(yùn)動(dòng)和角速率傳感器的新一代傳感器模塊,這款擁有6個(gè)自由度
2011-08-08 16:58:28
項(xiàng)目名稱:漁業(yè)衛(wèi)士-基于圖像識(shí)別的多自由度水下機(jī)器人試用計(jì)劃:1、申請理由希望早日接觸、應(yīng)用國產(chǎn)的鴻蒙系統(tǒng)。2、項(xiàng)目名稱漁業(yè)衛(wèi)士-基于圖像識(shí)別的多自由度水下機(jī)器人3、計(jì)劃(1)約三個(gè)月時(shí)間,應(yīng)用該款
2020-09-25 10:11:50
項(xiàng)目名稱:采用labview與FPGA的多自由度機(jī)械臂快速控制系統(tǒng)原型開發(fā)試用計(jì)劃: 機(jī)械臂在自動(dòng)化工業(yè)中廣泛應(yīng)用,由于每個(gè)自由度都有一對驅(qū)動(dòng)-傳感環(huán)節(jié),多自由度下各環(huán)節(jié)的配合,動(dòng)作完成的一致性需要
2016-12-19 15:30:56
申請理由:本項(xiàng)目涉及視覺識(shí)別算法,串聯(lián)機(jī)構(gòu)正逆解,多種傳感器信息融合,電機(jī)控制等。擬采用高速dsp為硬件,解決上述問題項(xiàng)目描述:果實(shí)自動(dòng)采摘三自由度串聯(lián)手臂的研制
2015-11-06 09:53:02
方法,邊緣提取,以及由擬合圓的方法,達(dá)到能獲取六自由度物體的微小位移或者旋轉(zhuǎn)角度,實(shí)現(xiàn)物體實(shí)時(shí)跟蹤定位。系統(tǒng)中是由CMOS相機(jī)獲取遠(yuǎn)距離目標(biāo)的實(shí)時(shí)圖像,利用軟件實(shí)現(xiàn)目標(biāo)的定位。 根據(jù)實(shí)驗(yàn)理論,該方法
2017-04-27 14:18:11
`準(zhǔn)備圍繞履帶車綜合做一些實(shí)際小項(xiàng)目,更重要的是將知識(shí)綜合運(yùn)用,我將圍繞履帶車去實(shí)現(xiàn)wifi控制,4自由度機(jī)械手控制,安卓app控制,PS2手柄無線控制,估計(jì)這個(gè)月內(nèi)將教程全部完成,代碼調(diào)試的差不多
2015-08-04 23:05:28
如題,我在Labview里搭的二自由度車輛模型,給了一個(gè)角階躍信號(hào),怎么出不來響應(yīng)圖啊
2015-07-29 14:04:20
最近在參與一個(gè)六個(gè)自由度座椅控制的課題,需要查閱哪些方面的相關(guān)書籍,有什么推薦嗎?謝謝各位
2017-01-13 14:46:46
``受大象鼻子啟發(fā),研制出的萬向自由度的機(jī)械臂,可以完成更柔性的工作``
2016-10-19 14:36:31
` 本帖最后由 3010203109 于 2013-11-14 18:09 編輯
啤酒生產(chǎn)線介紹:機(jī)械手抓瓶視頻:啤酒生產(chǎn)線六自由度機(jī)械手抓瓶控制系統(tǒng)設(shè)計(jì):任務(wù)要求裝箱工藝主要分為2個(gè)部分:視覺
2013-11-14 12:04:29
。 四自由度機(jī)械臂機(jī)械系統(tǒng) 本文討論的四自由度機(jī)械臂面向中小型物流系統(tǒng)應(yīng)用。其基本的設(shè)計(jì)要求為:實(shí)用、有相對大的作業(yè)空間、抓取重量不小于2.5kg、具有不大于10mm的重復(fù)定位精度、自重輕、外觀整潔
2015-02-12 16:10:04
一前言針對機(jī)器人相關(guān)專業(yè)的教學(xué)需求,商飛信息科技開發(fā)出此開源六自由度協(xié)作機(jī)器人實(shí)驗(yàn)平臺(tái)。該平臺(tái)有以下幾大特色機(jī)器人本體采用自主設(shè)計(jì)的3Kg負(fù)載六自由度協(xié)作機(jī)器人,機(jī)器人每個(gè)關(guān)節(jié)集成電機(jī)、減速器和驅(qū)動(dòng)
2021-09-07 07:10:14
六自由度Stewart并聯(lián)運(yùn)動(dòng)平臺(tái)模型-X,Y,Z平移、旋轉(zhuǎn)測試六自由度Stewart并聯(lián)運(yùn)動(dòng)平臺(tái)-Z向旋轉(zhuǎn)正弦波復(fù)現(xiàn)六自由度Stewart并聯(lián)運(yùn)動(dòng)平臺(tái)-Z向平移正弦波復(fù)現(xiàn)
2014-04-16 23:25:51
,從而影響動(dòng)力裝置的安全運(yùn)行。由于蒸汽發(fā)生器中存在放射性物質(zhì),當(dāng)發(fā)生泄漏時(shí),人不能進(jìn)入其中進(jìn)行維修,這時(shí)就需要機(jī)械臂代替人完成維修工作。機(jī)械臂檢修系統(tǒng)即通過六自由度機(jī)械臂對蒸汽發(fā)生器內(nèi)部進(jìn)行檢修和維護(hù)
2011-09-29 17:02:53
怎么用LabVIEW自定義一個(gè)導(dǎo)彈(飛行器)的六自由度彈道仿真界面,使其能夠和simulink進(jìn)行聯(lián)合仿真,并且能夠在界面中顯示導(dǎo)彈打擊目標(biāo)的三維運(yùn)動(dòng)曲線,有沒有做過的或者這方面比較牛的人給一些指點(diǎn),我是新手,LabVIEW不太懂,但是這個(gè)課程設(shè)計(jì)要的比較急,求幫助,我有彈道仿真simulink程序
2014-12-20 21:40:52
什么是電磁干擾?有什么方法可以降低DSP系統(tǒng)的電磁干擾嗎?
2021-04-23 06:10:26
我們設(shè)計(jì)的四自由度機(jī)器人走一定距離會(huì)走偏,要求走四米的直線,偏差不能超過五厘米,而且還要轉(zhuǎn)彎后繼續(xù)走直線,請問有什么比較好用的傳感器可以既節(jié)省時(shí)間又可以讓行走偏差縮小。
2014-08-15 15:49:53
本人設(shè)計(jì)了用51設(shè)計(jì)了一個(gè)晾衣架,但是需要兩個(gè)自由度(前后和左右),得用兩個(gè)驅(qū)動(dòng)模塊,用了一個(gè)后,發(fā)現(xiàn)單片機(jī)引腳不夠了,想請教一下有什么可以解決的辦法。
2019-03-02 14:07:29
更輕松。Dialog 將無線收發(fā)器和傳感器組合在專用模塊中,進(jìn)而獲得世界上功耗最低的 12 自由度 (DOF) 無線傳感器模塊。該模塊在縮減系統(tǒng)尺寸和成本的同時(shí),還包含了用于加快物聯(lián)網(wǎng)系統(tǒng)開發(fā)的所有必要
2018-07-10 09:51:47
積累和放大、位置反解容易等優(yōu)點(diǎn), 與串聯(lián)機(jī)構(gòu)在應(yīng)用上形成了互補(bǔ)關(guān)系。目前, 對并聯(lián)機(jī)器人研究較多的是6 自由度( 6DOF) 并聯(lián)機(jī)器人, 但在某些場合2~5 個(gè)自由度即可滿足使用要求, 這類少于6 自由度
2019-06-02 08:00:00
環(huán)境中,也可作為教學(xué)科研演示設(shè)備進(jìn)行推廣。圖3 四自由度機(jī)械臂樣機(jī)圖4 鋼絲傳動(dòng)機(jī)構(gòu)示意圖控制系統(tǒng)設(shè)計(jì) 在綜合考慮了項(xiàng)目的機(jī)械結(jié)構(gòu)要求、功能目標(biāo)、開發(fā)周期等因素后,我們對于控制系統(tǒng)的設(shè)計(jì)定下如下的方案
2019-05-06 09:26:38
看到的全動(dòng)飛行模擬器,其運(yùn)動(dòng)系統(tǒng)具有六個(gè)自由度,即在三維坐標(biāo)中繞三個(gè)軸的轉(zhuǎn)動(dòng)及沿三個(gè)軸的線位移,動(dòng)筒的協(xié)同運(yùn)動(dòng),可驅(qū)動(dòng)平臺(tái)并使座艙模擬出飛機(jī)的運(yùn)動(dòng)變化情況,可完成升降,俯仰,轉(zhuǎn)向,偏航等動(dòng)作。 六自由度
2020-09-07 17:20:34
利用MATLAB仿真分析二自由度跟隨伺服系統(tǒng)Simulated Analyzing 2 Degree of Freedom Follow一up Servo System by using MATLAB施 丈 濟(jì)(浙江水利水電專科學(xué)校,杭州310016)摘要利用MATLAB提供的
2008-10-18 23:01:53 20
20 系統(tǒng)和激光測距系統(tǒng)來確定空間點(diǎn)的坐標(biāo),從而實(shí)現(xiàn)完整的測量過程。 中圖儀器GTS激光跟蹤儀集激光干涉測距技術(shù)、光電檢測技術(shù)、精密機(jī)械技術(shù)、計(jì)算機(jī)及控制技術(shù)
2022-06-30 14:50:49
機(jī)床導(dǎo)軌直線
度,轉(zhuǎn)臺(tái)軸向,相互垂直
度,徑向跳動(dòng)等。實(shí)際加工過程
中可以使用激光
跟蹤儀實(shí)測被加工零件尺寸,以此做為機(jī)床加工進(jìn)給量的依據(jù),此時(shí)激光
跟蹤儀由檢測設(shè)備轉(zhuǎn)變?yōu)楣?/div>
2022-06-30 14:56:40
介紹了虛擬現(xiàn)實(shí)和跟蹤系統(tǒng)的概念、用途以及磁阻傳感器的特點(diǎn)闡述了利用磁阻傳感器開發(fā)虛擬現(xiàn)實(shí)三自由度和六自由度跟蹤系統(tǒng)的基本原理及其應(yīng)用。關(guān)鍵詞: 磁阻傳感器; 虛
2009-06-27 09:19:2316 提出一種單神經(jīng)元二自由度PID 控制方法,將前饋型二自由度PID 的五個(gè)參數(shù)分別對應(yīng)于單神經(jīng)元的五個(gè)權(quán)值,將二次型性能指標(biāo)Pe2 (k) + QΔu 2 (k)作為控制算法中加權(quán)系數(shù)學(xué)習(xí)的優(yōu)化
2009-08-27 08:35:3711 新型三自由度碟型磁浮馬達(dá)特性量測與改善本計(jì)劃將針對本校電機(jī)系所研制之新型三自由度碟型磁浮馬達(dá)進(jìn)行特性量測與改善。此碟型磁浮馬達(dá)是由具有18 個(gè)E型硅鋼片之三相交流
2009-11-17 18:13:3238 針對二自由度PID 控制器參數(shù)整定困難的問題,提出了一種基于單親遺傳算法的二自由度參數(shù)整定方法。運(yùn)用該算法分別對單自由度PID 控制器和二自由度控制器進(jìn)行了整定,并與
2009-12-26 13:56:4223 GTS激光跟蹤測量系統(tǒng)主要用于百米大尺度空間三維坐標(biāo)的精密測量,如在航空航天領(lǐng)域?qū)︼w機(jī)零部件及裝配精度的測量;在機(jī)床行業(yè)中對機(jī)床平面度、直線度、圓柱度等的測量;在汽車制造中對車型的在線測量;在制造中
2023-08-30 10:35:56
的測量問題。 GTS國內(nèi)激光跟蹤測量儀已經(jīng)發(fā)展出三自由度激光跟蹤儀和六自由度激光跟蹤儀家族系列,可以和多種形式的合作目標(biāo)測頭配合使用:1、GTS3000激
2023-09-04 11:49:43
、軌道交通等裝備制造行業(yè)以及大型科學(xué)工程、工業(yè)母機(jī)的高精密加工和裝配中,已成為多個(gè)行業(yè)的習(xí)慣和測量標(biāo)準(zhǔn)。主機(jī)測量系統(tǒng)(1)GTS六自由度激光自動(dòng)精準(zhǔn)跟蹤測量儀集成化控制
2023-10-12 09:26:16
、集成裝配和逆向工程等應(yīng)用領(lǐng)域顯示出高測量精度和效率。中圖GTS激光跟蹤測量儀系統(tǒng)已經(jīng)發(fā)展出三自由度激光跟蹤儀和六自由度激光跟蹤儀家族系列,可以和多種形式的合作目標(biāo)
2023-10-17 14:22:14
中圖儀器牽頭的國家重點(diǎn)研發(fā)計(jì)劃——“六自由度激光自動(dòng)精準(zhǔn)跟蹤測量關(guān)鍵技術(shù)"的項(xiàng)目綜合績效評價(jià)會(huì)議在深圳順利召開。本項(xiàng)目瞄準(zhǔn)我國航空航天、汽車船舶、軌道交通、機(jī)器人、核電、大科學(xué)裝置等裝備制造領(lǐng)域
2023-10-27 11:27:00
空間坐標(biāo)和空間姿態(tài)的測量問題。中圖儀器GTS大尺寸三維空間測量儀激光跟蹤儀已經(jīng)發(fā)展出三自由度激光跟蹤儀和六自由度激光跟蹤儀家族系列,可以和多種形式的合作目標(biāo)測頭配
2023-11-15 09:26:26
本文介紹了由計(jì)算機(jī)對步進(jìn)電機(jī)控制從而實(shí)現(xiàn)多自由度運(yùn)動(dòng)的系統(tǒng)的設(shè)計(jì)。同時(shí)詳細(xì)介紹了系統(tǒng)中的結(jié)構(gòu)組成、軟件的應(yīng)用和步進(jìn)電機(jī)的控制。該控制系統(tǒng)操作界面友好、簡單,動(dòng)
2010-07-21 09:54:0512 、工業(yè)母機(jī)等全域高精度空間坐標(biāo)和空間姿態(tài)的測量問題。與空間姿態(tài)探頭配合組成六自由度激光跟蹤儀,能夠根據(jù)合作目標(biāo)的精確空間姿態(tài)對被測工件的內(nèi)部特征、隱藏特征或曲面等
2023-12-19 09:21:48
高精度空間坐標(biāo)和空間姿態(tài)的測量問題。中圖儀器GTS國產(chǎn)光學(xué)跟蹤定位儀系統(tǒng)已經(jīng)發(fā)展出三自由度激光跟蹤儀和六自由度激光跟蹤儀家族系列,可以和多種形式的合作目標(biāo)測頭配合使用
2024-03-11 11:17:11
三自由度氣動(dòng)機(jī)械手的PLC控制
一、實(shí)驗(yàn)?zāi)康模和ㄟ^對一個(gè)三自由度氣動(dòng)機(jī)械手的控制程序的設(shè)計(jì),熟悉基于PLC的
2008-09-23 08:19:423146 SimTec仿真技術(shù)公司總部位于德國北部Braunschweig,是一家擁有超過20年歷史的國際領(lǐng)先的運(yùn)動(dòng)仿真系統(tǒng)制造公司。 SimTec專門電液伺服液多自由度運(yùn)動(dòng)模擬系統(tǒng)及運(yùn)動(dòng)數(shù)據(jù)采集系統(tǒng)的的軟硬
2011-04-07 16:34:4222 闡述了二自由度系統(tǒng)的類型及應(yīng)用價(jià)值,推出了基本運(yùn)算為不完全微分PID的濾波型二自由度控制算法,它具有結(jié)構(gòu)簡單,參數(shù)整定容易,比常規(guī)PID控制器性能優(yōu)越等特點(diǎn)。
2011-04-09 10:06:44108 針對典型的工業(yè)過程控制對象,提出了一種二自由度內(nèi)模控制方法,此方法可以使系統(tǒng)同時(shí)具有良好的目標(biāo)值跟蹤特性、干擾抑制特性和魯棒性,改進(jìn)了常規(guī)內(nèi)模控制的不足,而且控制算法簡
2011-05-23 15:12:4027 基于MSP430F149單片機(jī)設(shè)計(jì)了一種三自由度轉(zhuǎn)臺(tái)系統(tǒng)。在該系統(tǒng)中,利用旋轉(zhuǎn)編碼器的信息反饋,通過對電機(jī)的閉環(huán)控制,使三自由度轉(zhuǎn)臺(tái)能夠模擬飛機(jī)的飛行姿態(tài)。
2011-09-26 13:58:192288 
大專生畢業(yè)設(shè)計(jì)任務(wù)書《基于PLC的五自由度噴漆機(jī)械手控制系統(tǒng)設(shè)計(jì)》。
2016-03-18 14:03:580 超聲波在六自由度測量定位系統(tǒng)中的應(yīng)用,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-05-04 14:37:530 19自由度機(jī)器人_動(dòng)作例程,感興趣的小伙伴們可以瞧一瞧。
2016-11-17 18:35:231 二自由度行波型超聲波電機(jī)定子的優(yōu)化研究_傅平
2017-01-04 16:45:451 軸向電磁軸承多自由度承載力理論與實(shí)驗(yàn)研究_張?jiān)迄i
2017-01-07 18:39:176 多自由度超聲電機(jī)驅(qū)動(dòng)電路研究_朱華
2017-01-08 11:20:203 兩自由度直驅(qū)感應(yīng)電機(jī)優(yōu)化設(shè)計(jì)及特性分析_司紀(jì)凱
2017-01-08 11:28:380 永磁轉(zhuǎn)子偏轉(zhuǎn)式三自由度電機(jī)電磁系統(tǒng)的建模與分析_李爭
2017-01-08 12:03:280 基于模糊PD算法的三自由度機(jī)械臂遙操作雙邊控制_邱恒
2017-01-21 12:16:517 六自由度液壓運(yùn)動(dòng)平臺(tái)的迭代學(xué)習(xí)控制_盧穎
2017-03-15 08:00:001 6自由度機(jī)器人 雙足竟步機(jī)器人研究報(bào)告 加代碼
2017-04-10 11:19:1266 理想的少自由度并聯(lián)機(jī)構(gòu)的所有分支最好具有完全相同的結(jié)構(gòu),保持結(jié)構(gòu)的對稱,以滿足各向同性的要求。以單開鏈支路為單元,提出了一種新型的對稱的少自由度的并聯(lián)機(jī)器人機(jī)構(gòu)。研究結(jié)果表明,該機(jī)構(gòu)的運(yùn)動(dòng)平臺(tái)具有
2017-10-23 16:24:5015 建立了二自由度汽車油氣懸架系統(tǒng)模型,分析了油氣懸架和車身模型的非線性特性。運(yùn)用AMEsim仿真軟件,通過模型對不同的激振頻率的時(shí)域和頻譜響應(yīng)分析,驗(yàn)證了油氣懸架非線性振動(dòng)模型的正確性。仿真結(jié)果表明,系統(tǒng)產(chǎn)生了接近激振頻率分?jǐn)?shù)(或整數(shù)倍)的頻率分量,造成亞諧波(或超諧波)共振,導(dǎo)致系統(tǒng)振動(dòng)不穩(wěn)定。
2018-01-16 16:49:302 機(jī)器人機(jī)構(gòu)能夠獨(dú)立運(yùn)動(dòng)的關(guān)節(jié)數(shù)目,稱為機(jī)器人機(jī)構(gòu)的運(yùn)動(dòng)自由度,簡稱自由度(Degree of Freedom),由DOF簡寫表示。
2018-01-17 10:03:2011464 現(xiàn)在用的最多的工業(yè)機(jī)器人,一般都是六軸的,但是最近推出來的人機(jī)協(xié)作機(jī)械臂,卻有7個(gè)自由度,一直想不明白為什么。直到最近看到知乎上的一個(gè)問題:人的手臂(腕關(guān)節(jié)到肩關(guān)節(jié))有幾個(gè)自由度?才發(fā)現(xiàn),原來
2018-02-07 15:40:2517441 
六自由度電磁跟蹤定位系統(tǒng)根據(jù)法拉第電磁感應(yīng)定律研制的空間跟蹤定位裝置,可實(shí)時(shí)地確定目標(biāo)的6個(gè)參數(shù),在機(jī)載火控系統(tǒng)陽1、精密醫(yī)療器械、虛擬現(xiàn)實(shí)系統(tǒng)、作戰(zhàn)模擬訓(xùn)練、管道缺陷無損檢測隋1等方面獲得了
2018-02-09 14:25:550 積累和放大、位置反解容易等優(yōu)點(diǎn), 與串聯(lián)機(jī)構(gòu)在應(yīng)用上形成了互補(bǔ)關(guān)系。目前, 對并聯(lián)機(jī)器人研究較多的是6 自由度( 6DOF) 并聯(lián)機(jī)器人, 但在某些場合2~5 個(gè)自由度即可滿足使用要求, 這類少于6 自由度
2018-10-07 10:57:005510 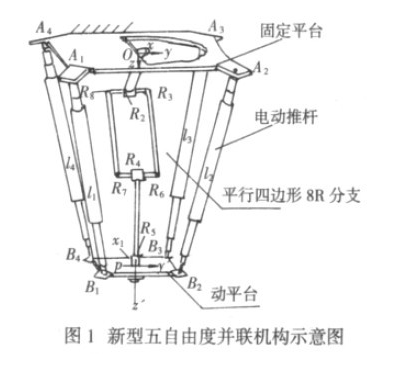
高速攻擊型無人機(jī)的飛行控制系統(tǒng)需要具有最佳的指令跟蹤性能、干擾抑制性能和魯棒性,而傳統(tǒng)單自由度PID控制技術(shù)只有1組PID參數(shù),無法同時(shí)滿足上述設(shè)計(jì)要求,針對這一問題,采用給定值濾波器型二自由度微分
2018-12-27 08:00:003 現(xiàn)在用的最多的工業(yè)機(jī)器人,一般都是六軸的,但是最近推出來的人機(jī)協(xié)作機(jī)械臂,卻有7個(gè)自由度,一直想不明白為什么。
2019-03-17 09:23:0225892 目前,以磁懸浮系統(tǒng)為主的制造業(yè)發(fā)展較為緩慢,其關(guān)鍵是產(chǎn)品的設(shè)計(jì)方法有待提高。而作為磁懸浮基礎(chǔ)的單自由度控制策略與方法則可以視為多自由度系統(tǒng)控制的基礎(chǔ),因而具有很高的研究意義。
2019-04-16 16:07:343415 
他們采用了一種MBDA之前在Simulink中已經(jīng)開發(fā)出來的6自由度火箭模型。 他們將此6自由度火箭模型與另一個(gè)MBDA團(tuán)隊(duì)在Simulink中開發(fā)的跟蹤天線控制器模型結(jié)合在一起。他們使用組合模型運(yùn)行蒙特卡羅模擬,并改進(jìn)系統(tǒng)的精度和帶寬要求。
2019-09-12 15:50:031680 我希望這些照片對您有所幫助組裝您的4自由度機(jī)械臂。
2019-10-09 11:52:039860 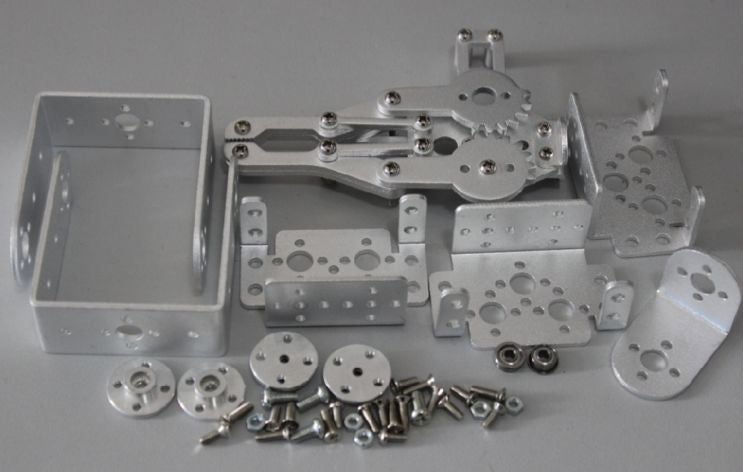
這是一款兼容Arduino的有6自由度傳感器擴(kuò)展板,它使用了一個(gè)ADXL345三軸加速器和一個(gè)ITG-3200三軸螺旋儀。
2019-11-27 15:35:541011 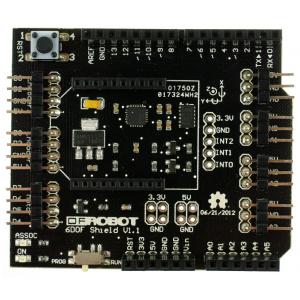
一款小型、性價(jià)比較高的6自由度機(jī)械臂 簡介 機(jī)械臂、機(jī)械手相信大家都不陌生了如醫(yī)院里的手術(shù)機(jī)械手、工廠里的工業(yè)機(jī)械手,但其龐大的身軀和高額的售價(jià),使我們愛好者望而卻步,如今DFRobot開發(fā)了一款
2020-01-14 10:48:394405 
ADIS16486:六自由度慣性傳感器數(shù)據(jù)表
2021-03-22 13:11:534 ADIS16407:十自由度慣性傳感器數(shù)據(jù)表
2021-05-09 18:03:099 ADIS16365:六自由度慣性傳感器數(shù)據(jù)表
2021-05-23 20:27:512 ADIS16489七自由度慣性傳感器數(shù)據(jù)表
2021-06-02 15:02:583 1、功能描述 ? ? ?R308樣機(jī)是一款擁有3自由度的串聯(lián)機(jī)械臂。本文提供的示例所實(shí)現(xiàn)的功能為:在3自由度串聯(lián)機(jī)械臂樣機(jī)上安裝電磁鐵,實(shí)現(xiàn)電磁鐵搬運(yùn)物品的功能。 2、電子硬件 在這個(gè)示例中,我們
2023-03-09 08:31:06600 
工業(yè)機(jī)器人自由度一般分為4個(gè)自由度,或者6個(gè)自由度,關(guān)節(jié)機(jī)器人主要是模仿人的手臂進(jìn)行設(shè)計(jì)的。
2023-03-16 12:20:301648 本文實(shí)例將實(shí)現(xiàn)2自由度并聯(lián)仿生腿模組運(yùn)動(dòng)起來,模擬實(shí)現(xiàn)狗腿行走的動(dòng)作。
2023-06-18 10:35:20296 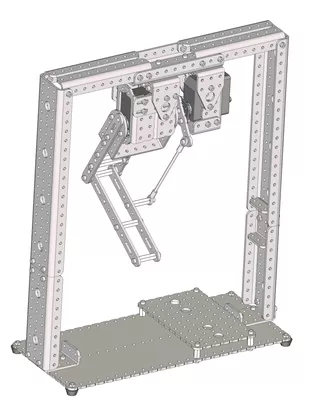
本文示例將實(shí)現(xiàn)4自由度并聯(lián)機(jī)器狗行走的功能。
2023-06-18 10:49:20466 
本期采用Simulink建立汽車2自由度動(dòng)力學(xué)模型。為了便于掌握汽車穩(wěn)定性的基本特性,對汽車簡化為線性二自由度的汽車模型,忽略轉(zhuǎn)向系統(tǒng)的影響,直接一前輪轉(zhuǎn)角作為輸入;忽略懸架的作用,認(rèn)為汽車車廂只作用于地面的平面運(yùn)動(dòng)。
2023-06-28 16:39:131101 
線性2自由度汽車模型是汽車操縱穩(wěn)定性分析中最簡單、最典型的模型。
2023-06-28 16:52:311166 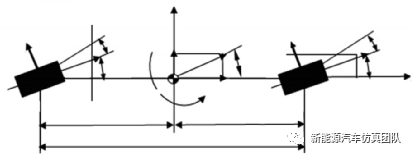
中圖儀器GTS激光跟蹤測量系統(tǒng)已經(jīng)發(fā)展出三自由度激光跟蹤儀和六自由度激光跟蹤儀家族系列,可以和多種形式的合作目標(biāo)測頭配合使用:1、GTS3000激光跟蹤儀與光學(xué)回射靶球配合組成三自由度激光跟蹤
2023-07-13 14:54:330 GTS6000激光跟蹤儀與空間姿態(tài)探頭配合組成六自由度激光跟蹤儀,能夠根據(jù)合作目標(biāo)的精確空間姿態(tài)對被測工件的內(nèi)部特征、隱藏特征或曲面等復(fù)雜特征進(jìn)行快速、高精度的測量。
2023-07-21 10:58:58402 
中圖儀器GTS激光跟蹤測量儀系統(tǒng)已經(jīng)發(fā)展出三自由度激光跟蹤儀和六自由度激光跟蹤儀家族系列,可以和多種形式的合作目標(biāo)測頭配合使用。在實(shí)踐中可以為為航空航天、汽車制造、重型機(jī)械制造、重工與船舶、科學(xué)研究、能源等領(lǐng)域等行業(yè)提供可靠的技術(shù)保障。
2023-07-28 14:32:01493 
端裝備制造領(lǐng)域?qū)ψ藨B(tài)測量傳感與測量系統(tǒng)的重大需求,自主研發(fā)的六自由度激光精準(zhǔn)跟蹤測量系統(tǒng),增加了我國核心測量儀器的自主可控能力。會(huì)議期間,專家組詳細(xì)審閱了項(xiàng)目相關(guān)材
2023-09-28 16:31:181623 
近年來,一些端到端學(xué)習(xí)方法被提出以增強(qiáng)六自由度物體定位的魯棒性,包括:直接回歸幾何參數(shù);采用渲染 - 比對來迭代地優(yōu)化位姿。盡管基于學(xué)習(xí)的方法具有潛力,但是直接回歸法精度有限、泛化能力差
2023-10-16 17:13:21319 
中圖儀器GTS激光跟蹤測量系統(tǒng)已經(jīng)發(fā)展出三自由度激光跟蹤儀和六自由度激光跟蹤儀家族系列,可以和多種形式的合作目標(biāo)測頭配合使用:1、GTS3000激光跟蹤儀與光學(xué)回射靶球配合組成三自由度激光跟蹤
2023-07-21 10:58:110 裝置等高端裝備制造領(lǐng)域?qū)ψ藨B(tài)測量傳感與測量系統(tǒng)的重大需求,自主研發(fā)的六自由度激光精準(zhǔn)跟蹤測量系統(tǒng),增加了我國核心測量儀器的自主可控能力。會(huì)議期間,專家組詳細(xì)審閱了
2023-10-07 11:34:310 激光跟蹤儀與空間姿態(tài)探頭(iProbe 6D姿態(tài)探頭)配合使用,就組成六自由度激光跟蹤儀。它能夠根據(jù)合作目標(biāo)的精確空間姿態(tài)對被測工件的內(nèi)部特征、隱藏特征或曲面等復(fù)雜特征進(jìn)行快速、高精度的測量。
2023-12-12 09:39:51299 
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論