快速傅里葉變換FFT算法及其應(yīng)用
2020-05-28 09:13:10
一種可靠的峰值和起始點(diǎn)檢測(cè)算法,該算法使用最初被提議用于動(dòng)脈血壓(ABP)波形的描繪方法。
2019-07-30 06:05:32
YSQ(于仕琪)人臉檢測(cè)介紹:YSQ人臉檢測(cè)算法實(shí)現(xiàn)快速從視頻幀中檢測(cè)人臉并提取關(guān)鍵信息,支持多視角檢測(cè),每個(gè)人臉提取68個(gè)關(guān)鍵點(diǎn)(Landmark)坐標(biāo)。算法使用標(biāo)準(zhǔn)C/C++實(shí)現(xiàn),無(wú)任何第三方庫(kù)或工具依賴。具有以下特點(diǎn)
2019-07-29 06:49:25
CCD圖像分析方法和預(yù)測(cè)算法???
2012-07-01 15:20:49
檢測(cè)系統(tǒng)在低功耗、輕小型化等方面提出了更高的要求。因此,完成小目標(biāo)檢測(cè)任務(wù)不僅需要尋求合理的小目標(biāo)檢測(cè)算法,在實(shí)現(xiàn)時(shí)還需要考慮處理性能和體積功耗。
2019-08-09 07:07:03
RK3399Pro是怎樣去移植Tencent的mtcnn人臉檢測(cè)算法的?有哪些移植步驟?
2022-02-15 06:15:52
申請(qǐng)理由:本人已經(jīng)成功完成閾值自適應(yīng)視頻邊緣檢測(cè)算法的FPGA快速實(shí)現(xiàn),但FPGA也有很多局限性,所以想將硬件平臺(tái)從FPGA換成香蕉派。相信會(huì)有全新的體驗(yàn),和更加快捷的開(kāi)發(fā)途徑。項(xiàng)目描述:在香蕉派上
2016-06-20 15:55:06
`線段檢測(cè)主要運(yùn)用Hough變換,Hough變換是圖像處理中從圖像中識(shí)別幾何形狀的基本方法之一,應(yīng)用很廣泛,也有很多改進(jìn)算法。主要用來(lái)從圖像中分離出具有某種相同特征的幾何形狀(如,直線,圓等
2015-05-26 11:22:58
申請(qǐng)理由:本人能夠很快的入手DSP開(kāi)發(fā)板,有五年的開(kāi)發(fā)經(jīng)驗(yàn)。對(duì)DSP開(kāi)發(fā)有相當(dāng)豐富的經(jīng)驗(yàn)。項(xiàng)目描述: 圖像處理的算法已經(jīng)確定,就是灰度化二值化,最后hough變化找到指針直線變換后的點(diǎn),通過(guò)計(jì)算公式得到指針?biāo)谖恢媒嵌龋c0值比較得出當(dāng)時(shí)的測(cè)量值。量程確定的方法類似于汽車車牌識(shí)別。
2015-09-10 11:18:54
芯片上方案比較少。我們嘗試在定點(diǎn)DSP上處理人臉檢測(cè)效率低,沒(méi)有達(dá)到我們預(yù)期的目的。而TMS620C6748芯片是我們另外一個(gè)選擇。該方案需要通過(guò)視頻采集圖像,利用圖像檢測(cè)算法獲取運(yùn)動(dòng)目標(biāo),然后對(duì)運(yùn)動(dòng)目標(biāo)區(qū)域進(jìn)行人臉檢測(cè)算法識(shí)別,并對(duì)目標(biāo)進(jìn)行跟蹤。
2015-09-10 11:09:12
人臉檢測(cè)算法及新的快速算法人臉識(shí)別設(shè)備憑借著便捷的應(yīng)用,以及更加新潮的技術(shù),俘獲了不少人的好感。于是,它的應(yīng)用也在日益的變得更加的廣泛。由中國(guó)電子學(xué)會(huì)主辦的全國(guó)圖形圖像技術(shù)應(yīng)用大會(huì),行業(yè)專家將介紹
2013-09-26 15:13:24
什么是AES算法?如何對(duì)AES算法進(jìn)行優(yōu)化?怎樣快速實(shí)現(xiàn)AES算法?
2021-04-28 06:51:19
什么?是開(kāi)始點(diǎn)和結(jié)束點(diǎn)嗎??這里的xy(:,1),xy(:,2)是代表什么??開(kāi)始點(diǎn)和結(jié)束點(diǎn)???這兩句話很不明白。經(jīng)過(guò)hough變換檢測(cè)出來(lái)的都是線段。如果要實(shí)現(xiàn)線段延長(zhǎng)線相交,獲得消失點(diǎn)要怎么去實(shí)現(xiàn)???
2016-03-03 21:24:51
目前優(yōu)化了一款高速人臉檢測(cè)算法,在 ARM設(shè)備的A73單核CPU(圖像大小:860*540最小人臉大小:60*60)速度可以高達(dá)10-15ms每幀,真正的實(shí)時(shí)人臉檢測(cè)算法,算法準(zhǔn)確率在 FDDB數(shù)據(jù)
2021-12-15 07:01:06
本帖最后由 sanallen 于 2013-4-5 17:14 編輯
基本概述:采用傳統(tǒng)的二維Hough變換,邊緣檢測(cè)采用CANNY算法,峰值檢測(cè)采用傳統(tǒng)的固定閾值的局部極值檢測(cè),以后會(huì)針對(duì)峰值檢測(cè)做出改進(jìn)算法,在這里附上源碼,基于DM642開(kāi)發(fā)板的固定硬件平臺(tái),只供大家參考。
2013-04-05 17:13:08
微分邊緣檢測(cè)算法主要是基于圖像強(qiáng)度的一階和二階導(dǎo)數(shù),而導(dǎo)數(shù)的計(jì)算對(duì)噪聲很敏感,噪聲的存在可能會(huì)使檢測(cè)到的邊緣變寬或在某些點(diǎn)處發(fā)生間斷,因此,需要使用濾波器來(lái)濾掉噪聲。大多數(shù)濾波器在降低噪聲的同時(shí)也
2018-09-21 11:45:44
什么是活體檢測(cè)?什么又是3D活體檢測(cè)?以及怎么實(shí)現(xiàn)惡劣環(huán)境(如人臉遮擋、惡劣光照等)與人臉多姿態(tài)變化(如側(cè)臉、表情等)應(yīng)用場(chǎng)景下的活體檢測(cè)呢?本文將會(huì)圍繞這些問(wèn)題,介紹數(shù)跡智能的最新成果——基于ToF的3D活體檢測(cè)算法。
2021-01-06 07:30:13
系統(tǒng)的關(guān)鍵任務(wù)之一,其主要的功能是檢測(cè)前方道路上出現(xiàn)的目標(biāo)的空間位置和目標(biāo)類別。傳統(tǒng)目標(biāo)檢測(cè)算法依賴于手工設(shè)計(jì)好的特征來(lái)對(duì)目標(biāo)進(jìn)行特征提取,以實(shí)現(xiàn)分類和檢測(cè)的目的,常見(jiàn)的目標(biāo)特征包括 Scale
2023-03-06 13:55:27
本文提出一種基于TM1300的4x4整數(shù)變換的快速算法,使用了并行算是技術(shù)大大減少了計(jì)算量。
2021-06-04 06:41:35
什么是同步檢測(cè)算法?如何去實(shí)現(xiàn)相位模糊估計(jì)的幀同步檢測(cè)算法?
2021-05-06 07:23:16
本文提出了可對(duì)手腕PPG信號(hào)實(shí)施PRV分析的可靠峰值和起始點(diǎn)檢測(cè)算法。
2021-06-17 09:25:04
無(wú)人機(jī)設(shè)計(jì)中姿態(tài)檢測(cè)算法、姿態(tài)控制算法有什么區(qū)別 ?推薦課程:張飛四旋翼飛行器視頻套件,76小時(shí)吃透四軸算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post
2018-07-14 12:12:37
有研究hough檢測(cè)圓的嗎,小弟剛學(xué),顯示的結(jié)果看著有點(diǎn)困難,能解釋一下嗎? Center 60 27 radius 20Center 61 27 radius 20Center 62 27 radius 20Center 63 27 radius 20…
2012-03-31 16:54:37
求Matlab圖像自編邊緣檢測(cè)算法,多謝了
2013-12-03 20:58:39
兩通道DPCA動(dòng)目標(biāo)檢測(cè)原理是什么?基于機(jī)載單通道SAR數(shù)據(jù)的地面運(yùn)動(dòng)目標(biāo)檢測(cè)算法
2021-06-03 06:04:06
算法能夠檢測(cè)喚醒詞,而無(wú)需工程師花費(fèi)大量時(shí)間來(lái)研究和配置芯片上的寄存器。”因此,DSP Group開(kāi)發(fā)了一種API,可以使語(yǔ)音檢測(cè)算法輕松集成到云服務(wù)中。他補(bǔ)充說(shuō):“在某種程度上,來(lái)自云服務(wù)提供商的語(yǔ)音
2021-03-03 10:46:14
詳解快速傅里葉變換FFT算法
2020-03-28 11:48:16
詳解快速傅里葉變換FFT算法
2020-05-25 09:31:30
詳解快速傅里葉變換FFT算法
2021-03-05 11:07:32
誰(shuí)有基于ADxL345加速度傳感器、430單片機(jī)的跌倒檢測(cè)算法程序啊?
2014-05-01 22:11:52
邊緣檢測(cè)是什么?邊緣檢測(cè)算子有哪些?邊緣檢測(cè)算法分為哪幾種?它們有何不同?
2021-05-31 06:57:51
本文提出了一種基于數(shù)字圖像處理技術(shù)的表面裂紋檢測(cè)算法。運(yùn)用這種算法能精確的檢測(cè)裂紋的位置、長(zhǎng)度等特征。將這種裂紋檢測(cè)算法運(yùn)用到裂紋自動(dòng)檢測(cè)系統(tǒng)以及裂紋擴(kuò)展行為
2009-08-21 10:37:06 36
36 討論了音視頻編碼標(biāo)準(zhǔn)AVS 中比較耗時(shí)的部分——8x8 IDCT 變換的一維快速算法,提出了變換算法在TI 公司的TMS320DM6446 芯片的C64x+ DSP 子系統(tǒng)上的快速實(shí)現(xiàn)方法。該方法針對(duì)視頻編碼的
2009-08-24 08:38:1210 密度聚類算法DBSCAN是一種有效的聚類分析方法。本文構(gòu)建了網(wǎng)絡(luò)入侵檢測(cè)系統(tǒng)模型,并將一種改進(jìn)的基于密度聚類的入侵檢測(cè)算法IDBC應(yīng)用于檢測(cè)引擎設(shè)計(jì)。IDBC算法改進(jìn)了網(wǎng)絡(luò)連接記
2009-08-24 08:41:564 提出一種新的基于小波變換的Harris 多尺度角點(diǎn)檢測(cè)算法,可以在不同的尺度下獲取角點(diǎn),克服了單一尺度的Harris 角點(diǎn)檢測(cè)算法可能存在的角點(diǎn)信息丟失和易受噪聲影響而檢測(cè)出
2010-01-09 11:18:2541 空間信源數(shù)檢測(cè)是陣列信號(hào)處理的關(guān)鍵問(wèn)題之一,常用的信源數(shù)檢測(cè)算法需要計(jì)算采樣協(xié)方差矩陣的特征值,該文提出一種基于改進(jìn)Hung-Turner 投影的多目標(biāo)信源數(shù)快速檢測(cè)算法,該
2010-02-09 11:22:235 一種微分極值的邊緣檢測(cè)算法
本文通過(guò)對(duì)邊緣點(diǎn)的定義,提出了一種微分極值的邊緣檢測(cè)算法。與經(jīng)典微分算法相比,該算法直接在邊緣檢測(cè)窗口內(nèi)提取邊界像
2010-02-22 15:03:568 DSP教程--快速富利葉變換
FAST FOURIER TRANSFORMS� The Discrete Fourier Transform� The Fast Fourier Transform
2010-04-09 18:10:1115 邊緣檢測(cè)是醫(yī)學(xué)圖像處理中非常重要的一個(gè)環(huán)節(jié),通過(guò)對(duì)幾種經(jīng)典邊緣檢測(cè)算法的分析,提出了一種基于Canny算子的改進(jìn)算法。該算法以圖像增強(qiáng)法代替原算法中的高斯濾波,以去除
2010-07-05 16:50:5615 在分析了自適應(yīng)小波變換和擴(kuò)頻特性的基礎(chǔ)上,提出一種基于自適應(yīng)小波變換的擴(kuò)頻數(shù)字水印算法,并利用DSP系統(tǒng)實(shí)現(xiàn)了該數(shù)字水印算法。對(duì)用DSP實(shí)現(xiàn)的數(shù)字水印系統(tǒng)進(jìn)行了測(cè)試,結(jié)果
2010-07-27 16:03:538 由于實(shí)際場(chǎng)景的多樣性,目前常用的運(yùn)動(dòng)目標(biāo)檢測(cè)算法都還存在一定程度的缺陷,因此本文提出了一種將幀差法和背景減法相結(jié)合的方法,實(shí)現(xiàn)快速精確地檢測(cè)和提取運(yùn)動(dòng)目標(biāo)。實(shí)
2010-07-27 16:42:0713 研究了三維空間中的碰撞檢測(cè)問(wèn)題。提出一種基于DirectX的物體三角形碰撞檢測(cè)方法,在游戲程序中分析并實(shí)現(xiàn)了這種碰撞檢測(cè)算法。該算法能以較快的速度解決游戲程序中物體間的碰
2010-11-19 14:58:090 快速小波變換的定點(diǎn)DSP實(shí)現(xiàn)
小波變換具有良好的時(shí)——頻局部性,是分析奇異信號(hào)的重要方法。定點(diǎn)DSP在工程中的應(yīng)用十分普遍,具有低成本,高性能的特點(diǎn)。利用DSP
2009-05-28 18:36:33 1298
1298 
摘要:本文基于廣義dqk旋轉(zhuǎn)坐標(biāo)變換的諧波電流檢測(cè)理論,以單相電路間諧波檢測(cè)為對(duì)象,通過(guò)對(duì)諧波頻率倍頻,提出了單相電路間諧波檢測(cè)技術(shù);并基于DSP微處理器研究了該技術(shù)工程化方法,包括采樣倍頻算法、旋轉(zhuǎn)變換算法、Q格式等DSP算法,并仿真驗(yàn)證。最后,
2011-03-01 14:26:2056 在FPGA上設(shè)計(jì)并實(shí)現(xiàn)了一種用于直線檢測(cè)快速HOUGH變換方法。使用分類濾波器把直線目標(biāo)分成多個(gè)方向,使多個(gè)方向上的運(yùn)算在空間上實(shí)現(xiàn)了并行處理;在每個(gè)方向上,設(shè)計(jì)實(shí)現(xiàn)了一種用于HOUGH變換的流水線處理結(jié)構(gòu);提出了一種基于直方圖統(tǒng)計(jì)的兩階段搜索算法。大
2011-03-16 13:57:5933 摘要! 在實(shí)際系統(tǒng)中對(duì)游程檢測(cè)的實(shí)現(xiàn)速度$電路規(guī)模有很高的要求# 而傳統(tǒng)的檢測(cè)方法性能 較低% 針對(duì)此問(wèn)題提出了一種新的游程檢測(cè)算法% 該算法基于硬件實(shí)現(xiàn)#電路結(jié)構(gòu)簡(jiǎn)單實(shí)現(xiàn)速度
2011-03-31 15:47:0618 本內(nèi)容提供了基于碼本模型的運(yùn)動(dòng)目標(biāo)檢測(cè)算法
2011-05-19 10:54:0132 針對(duì)標(biāo)準(zhǔn) Hough 變換在圓檢測(cè)中對(duì)時(shí)間空間需求高的問(wèn)題,提出一種改進(jìn)的Hough變換圓檢測(cè)算法。該算法將標(biāo)準(zhǔn)Hough變換檢測(cè)圓時(shí)的三維空間轉(zhuǎn)換為一維空間,利用圓為中心對(duì)稱圖形的幾
2011-08-05 15:14:5353 為了設(shè)計(jì)一種實(shí)時(shí)高效、穩(wěn)定可靠的圖像目標(biāo)跟蹤系統(tǒng)平臺(tái),避免因圖像邊緣提取效果差而引起跟蹤失敗,采用自適應(yīng)Canny邊緣檢測(cè)算法。該自適應(yīng)算法能夠很好的確定平滑參數(shù)以及高
2012-03-05 16:14:1338 點(diǎn),然后用強(qiáng)分類器進(jìn)行人臉的檢測(cè),進(jìn)一步利用混合投影峰分析檢測(cè)人眼的位置。通過(guò)C++實(shí)現(xiàn)了該算法,完成了人臉檢測(cè)算法的DSP程序移植。實(shí)驗(yàn)結(jié)果表明,該DSP系統(tǒng)可以有效的實(shí)現(xiàn)人眼檢測(cè)。
2016-06-17 16:00:4410 一種雙門限語(yǔ)音端點(diǎn)檢測(cè)算法的ASIC實(shí)現(xiàn)
2017-01-07 20:32:200 空瓶的智能檢測(cè)算法研究_劉煥軍
2017-01-14 22:34:290 工業(yè)機(jī)器人手臂快速碰撞檢測(cè)算法
2017-02-07 18:09:2023 基于Hough變換的橢圓檢測(cè)方法_樊曉燕
2017-03-18 09:52:220 移動(dòng)機(jī)器人視覺(jué)導(dǎo)航中基于Hough變換的直線檢測(cè)與跟蹤_周燕紅
2017-03-19 11:45:571 改進(jìn)的ViBe運(yùn)動(dòng)目標(biāo)檢測(cè)算法_劉春
2017-03-19 11:41:390 二維EMD的指紋邊緣檢測(cè)算法_賈可
2017-03-19 19:04:231 改進(jìn)的MIMO系統(tǒng)球譯碼檢測(cè)算法_仵丹
2017-03-19 19:04:232 行人慣性導(dǎo)航零速檢測(cè)算法_費(fèi)程羽
2017-03-19 19:07:044 基于機(jī)器視覺(jué)的色差檢測(cè)算法_范鵬飛
2017-03-19 19:25:563 法(MFD)、循環(huán)平穩(wěn)特征檢測(cè)法(CFD)。能量檢測(cè)是最簡(jiǎn)單的一種頻譜感知方法,它易于實(shí)現(xiàn),算法復(fù)雜度低。 實(shí)際環(huán)境中,噪聲功率波動(dòng)性大,從而使能量檢測(cè)算法的穩(wěn)健性變差,算法出現(xiàn)信噪比門限效應(yīng)。 基于此,提出了小波變換對(duì)信息進(jìn)
2017-11-10 09:58:003 移動(dòng)機(jī)器人可借助交通標(biāo)志牌進(jìn)行定位,文中提出了一種基于顏色分割和局部LPT變換的交通標(biāo)志牌檢測(cè)算法。首先利用交通標(biāo)志牌的顏色特征預(yù)分割出潛在的交通標(biāo)志區(qū)域,然后通過(guò)局部LPT空間變換,然后根據(jù)變換后的圖像特征進(jìn)行形狀檢測(cè),檢測(cè)出圓形的交通標(biāo)志牌。實(shí)驗(yàn)結(jié)果表明了算法的有效性。
2017-11-15 15:58:202 提出一種新的基于粒子群優(yōu)化算法的屬性異常檢測(cè)算法。該算法利用粒子群優(yōu)化算法簡(jiǎn)單、尋優(yōu)速度快的優(yōu)點(diǎn)檢測(cè)屬性異常,在粒子群尋找最優(yōu)值的過(guò)程中發(fā)現(xiàn)可能是屬性異常的數(shù)據(jù),并采用0-measure適應(yīng)度評(píng)估
2017-11-20 09:21:374 應(yīng)用提出的掃描線處理算法快速抽取進(jìn)行Hough變換的特征像素點(diǎn),最后用雙閾值Hough變換檢測(cè)直線。實(shí)驗(yàn)表明,所提算法創(chuàng)新性地將指針圖像細(xì)化與雙閾值Hough變換等相結(jié)合,不僅解決了光照變化的影響以及檢測(cè)速度慢等問(wèn)題,而且具有讀數(shù)精度高
2017-11-20 15:11:503 改進(jìn)的ViBe算法,以達(dá)到快速消除鬼影的目的,更準(zhǔn)確地完成前景目標(biāo)提取。在道路上設(shè)置固定檢測(cè)區(qū)域,根據(jù)運(yùn)動(dòng)目標(biāo)在固定檢測(cè)區(qū)域的運(yùn)動(dòng)軌跡來(lái)建立或者消除非固定虛擬線圈,再進(jìn)一步使用虛擬線圈的車流量檢測(cè)算法實(shí)現(xiàn)車流量統(tǒng)計(jì)
2017-12-08 14:56:390 針對(duì)紅外眼部視頻中瞳孔直徑檢測(cè)精度不夠高的問(wèn)題,提出了一種將Hough圓變換和輪廓匹配相結(jié)合的瞳孔檢測(cè)算法(Hough-Contour)。對(duì)每幀圖像,首先進(jìn)行灰度化并濾波去噪;然后提取邊緣并利用
2017-12-19 11:49:070 能。在眾多MIMO檢測(cè)算法中,線性檢測(cè)器由于其較低的實(shí)現(xiàn)成本和復(fù)雜度,得到了廣泛使用。然而在大規(guī)模MIMO系統(tǒng)中,線性檢測(cè)器中的矩陣求逆操作復(fù)雜度進(jìn)一步提高,大大增加了硬件實(shí)現(xiàn)的難度。因此,選擇和設(shè)計(jì)適合大規(guī)模MIMO系統(tǒng)的檢測(cè)算
2017-12-21 15:26:441 針對(duì)局部窗口K分布檢測(cè)算法運(yùn)算速度慢、計(jì)算效率低的問(wèn)題,提出了一種基于局部窗口K分布的快速艦船目標(biāo)檢測(cè)算法。該算法首先采用迭代分割算法對(duì)原始合成孔徑雷達(dá)( SAR)圖像進(jìn)行預(yù)篩選處理,根據(jù)預(yù)篩選選出
2017-12-22 14:04:120 集中性,能解決譜估計(jì)存在較大方差的問(wèn)題。理論推導(dǎo)及仿真結(jié)果證明,基于多窗譜的頻譜檢測(cè)算法是一種低方差、高分辨率的頻譜檢測(cè)方法,能有效實(shí)現(xiàn)低信噪比條件下的信號(hào)檢測(cè),且相比于其他檢測(cè)算法能達(dá)到更好的檢測(cè)性能。
2017-12-27 15:34:030 利用Hough變換進(jìn)行直線檢測(cè)時(shí),由于直線在參數(shù)空間中的映射容易受到鄰近目標(biāo)、噪聲以及本身非理想狀態(tài)的干擾,算法中的投票過(guò)程較易出現(xiàn)無(wú)效累積,進(jìn)而導(dǎo)致虛檢、漏檢及端點(diǎn)定位不準(zhǔn)等問(wèn)題。針對(duì)傳統(tǒng)方法
2017-12-29 14:23:011 針對(duì)現(xiàn)有跌倒檢測(cè)算法由于缺乏真實(shí)老人跌倒樣本以及使用年輕人仿真跌倒樣本規(guī)模較小導(dǎo)致的過(guò)擬合和適應(yīng)性不足等問(wèn)題,提出了基于隨機(jī)森林的跌倒檢測(cè)算法。該算法采用滑動(dòng)窗口機(jī)制,對(duì)窗口內(nèi)的加速度數(shù)據(jù)進(jìn)行
2017-12-29 14:50:292 本文針對(duì)現(xiàn)有的ML(Maximum Likelihood)檢測(cè)算法復(fù)雜度高,而傳統(tǒng)檢測(cè)算法性能不是很優(yōu)的問(wèn)題,提出了一種新的檢測(cè)算法。新的檢測(cè)算法結(jié)合ZF-OSIC和ML檢測(cè)算法,根據(jù)ZF-OSIC
2017-12-29 14:52:210 針對(duì)廣義Hough變換(GHT)算法匹配發(fā)生旋轉(zhuǎn)圖像中的目標(biāo)形狀時(shí)發(fā)生誤匹配的問(wèn)題,提出一種基于U弦長(zhǎng)曲率的具有抗旋轉(zhuǎn)性的廣義Hough變換算法。首先,對(duì)模板形狀采用邊緣點(diǎn)的U弦長(zhǎng)曲率和偏移
2018-01-04 15:42:220 集網(wǎng)格和最近數(shù)據(jù)網(wǎng)格的小規(guī)模數(shù)據(jù)流計(jì)算集,以快速即時(shí)地衡量最新數(shù)據(jù)點(diǎn)的異常程度,將改進(jìn)的算法用于無(wú)線傳感器網(wǎng)絡(luò)采集的電梯真實(shí)數(shù)據(jù)流檢測(cè),實(shí)現(xiàn)電梯故障檢測(cè)。實(shí)驗(yàn)結(jié)果表明,與ABOD、HODA等算法相比,改進(jìn)算法能有效識(shí)
2018-01-17 11:29:341 在遙感圖像中,對(duì)江河上橋梁目標(biāo)的識(shí)別具有重要意義。由于橋梁的最突出特征在于橋體的平行直線,所以對(duì)平行直線的實(shí)時(shí)檢測(cè)十分重要。經(jīng)典的Hough變換是一種常用的檢測(cè)直線的方法,Hough變換的研究及應(yīng)用動(dòng)態(tài):Hough變換于1962年由Paul Hough提出,并在美國(guó)作為專利被發(fā)表。
2019-06-18 08:07:002043 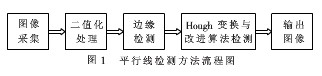
本文檔的主要內(nèi)容詳細(xì)介紹的是hough變換檢測(cè)直線函數(shù)程序免費(fèi)下載。函數(shù)用于對(duì)檢測(cè)圖像中的平行直線。如果圖像中有兩條平行的直線,則將這兩條平行直線提取出來(lái)。
2018-08-29 16:46:3615 本文檔的主要內(nèi)容詳細(xì)介紹的是利用Hough變換檢測(cè)直線的MATLAB程序免費(fèi)下載。
2019-10-21 08:00:001 提出一種應(yīng)用于RFID 系統(tǒng)上行鏈路的多標(biāo)簽沖突檢測(cè)算法, 并給出了參考實(shí)現(xiàn)電路。依算法, 對(duì)電子標(biāo)簽進(jìn)行隨機(jī)分群, 在群間做隨機(jī)避讓, 在群內(nèi)進(jìn)行沖突檢測(cè)和標(biāo)簽的仲裁。與現(xiàn)有的隨機(jī)避讓算法和二進(jìn)制樹(shù)算法相比, 該算法不但有效降低了碰撞次數(shù), 實(shí)現(xiàn)電路也更簡(jiǎn)單。
2020-01-15 17:04:593 為了實(shí)現(xiàn)非結(jié)構(gòu)化道路檢測(cè)與障礙物的識(shí)別,提出了一種基于最小錯(cuò)誤率貝葉斯決策與 Hough變換相結(jié)合的非結(jié)構(gòu)化道路檢測(cè)與障礙物識(shí)別算法。算法首先將Otsu多閾值理論引入到最小錯(cuò)誤率貝葉斯決策中并進(jìn)
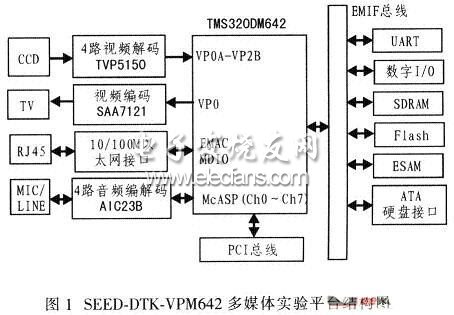
2020-07-06 17:45:587 數(shù)字圖像處理技術(shù)廣泛應(yīng)用于機(jī)器視覺(jué)、自動(dòng)化檢測(cè)和視頻監(jiān)控等領(lǐng)域。通用的圖像處理系統(tǒng)采用圖像采集卡將圖像傳送至PC,從而實(shí)現(xiàn)圖像處理的各種算法。近年來(lái),隨著集成電路和嵌入式技術(shù)的發(fā)展,特別是DSP
2020-08-13 15:05:12547 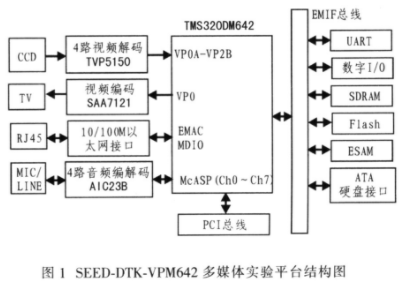
本文給出了一種適合于用硬件實(shí)現(xiàn)的多通道自相關(guān)信號(hào)檢測(cè)算法。該算法采用三路并行的自相關(guān)信號(hào)檢測(cè)通道,在三路中采用不同的相關(guān)點(diǎn)數(shù)和檢測(cè)門限,最后綜合考慮三路的檢測(cè)結(jié)果,給出最終的檢測(cè)結(jié)果。這種多通道自相
2021-03-10 17:13:0043 現(xiàn)有數(shù)據(jù)流離群點(diǎn)檢測(cè)算法在面對(duì)海量高維數(shù)據(jù)流時(shí)普遍存在運(yùn)算時(shí)間過(guò)長(zhǎng)的問(wèn)題。為此,提出一種引入局部向量點(diǎn)積密度的高維數(shù)據(jù)流離群點(diǎn)快速檢測(cè)算法。以保存少量中間結(jié)果的方式只對(duì)窗口內(nèi)受影響的數(shù)據(jù)點(diǎn)進(jìn)行增量
2021-03-17 16:18:1412 為實(shí)現(xiàn)230MHz頻段電力無(wú)線通信頻譜的快速可靠認(rèn)知,提出一種協(xié)作式步進(jìn)頻域能量檢測(cè)算法。該算法在頻域進(jìn)行2次步進(jìn)能量檢測(cè),第一次步進(jìn)能量檢測(cè)以較大的步進(jìn)值對(duì)全頻段進(jìn)行快速檢測(cè),檢測(cè)中被占用的頻帶
2021-03-30 13:47:218 整體框架 目標(biāo)檢測(cè)算法主要包括:【兩階段】目標(biāo)檢測(cè)算法、【多階段】目標(biāo)檢測(cè)算法、【單階段】目標(biāo)檢測(cè)算法 什么是兩階段目標(biāo)檢測(cè)算法,與單階段目標(biāo)檢測(cè)有什么區(qū)別? 兩階段目標(biāo)檢測(cè)算法因需要進(jìn)行兩階
2021-04-30 10:22:0410070 
為對(duì)結(jié)構(gòu)性數(shù)據(jù)的髙效干擾進(jìn)行檢測(cè),以線性分組碼為研究對(duì)象,在經(jīng)典能量檢測(cè)算法的噪聲模型中加入惡意干擾信號(hào),推導(dǎo)二元假設(shè)模型中檢驗(yàn)統(tǒng)計(jì)量的數(shù)學(xué)表達(dá)式。在此基礎(chǔ)上,以虛警率與漏檢率之和最小為準(zhǔn)則提出一種
2021-05-27 15:15:177 為在電子商務(wù)水軍群組檢測(cè)中快速處理真實(shí)環(huán)境中的大規(guī)模用戶數(shù)據(jù),提出一種分布式水軍群組檢測(cè)算法。設(shè)計(jì)基于余弦模式挖掘的候選群組提取算法,通過(guò)氽弦相似度衡量群組成員間旳耦合性,以精準(zhǔn)提取候選群組并降低
2021-06-21 16:14:0610 簡(jiǎn) 介: 利用FFT算法實(shí)現(xiàn)快速傅里葉變換, 在理論、工程中具有非常廣泛的應(yīng)用。除了能夠在合適的計(jì)算平臺(tái)完成FFT算法,同時(shí)還需要注意到它在頻譜分析中可能帶來(lái)的頻率混疊以及頻率泄露等問(wèn)題。
2022-07-10 09:07:002632 在計(jì)算機(jī)視覺(jué)領(lǐng)域,我們經(jīng)常需要做一些特殊的任務(wù),而這些任務(wù)中經(jīng)常會(huì)用到直線檢測(cè)算法,比如車道線檢測(cè)、長(zhǎng)度測(cè)量等。盡管直線檢測(cè)的任務(wù)看起來(lái)比較簡(jiǎn)單,但是在具體的應(yīng)用過(guò)程中,你會(huì)發(fā)現(xiàn)這里面還是有很大的優(yōu)化空間,本文對(duì)常用的一些比較經(jīng)典的直線檢測(cè)算法進(jìn)行匯總
2022-11-25 17:25:211026 解開(kāi)車輛檢測(cè)算法之謎
2023-01-05 09:43:38803 
Canny 邊緣檢測(cè)算法 是 John F. Canny 于 1986年開(kāi)發(fā)出來(lái)的一個(gè)多級(jí)邊緣檢測(cè)算法,此算法被很多人認(rèn)為是邊緣檢測(cè)的最優(yōu)算法,相對(duì)其他邊緣檢測(cè)算法來(lái)說(shuō)其識(shí)別圖像邊緣的準(zhǔn)確度要高很多。
2023-01-05 11:41:191010 Hough變換是一個(gè)比較有名的計(jì)算機(jī)視覺(jué)處理算法,該算法可以用來(lái)做很多的任務(wù),常用的任務(wù)包括直線檢測(cè)、圓檢測(cè)、橢圓檢測(cè)等,下面我們將對(duì)該算法進(jìn)行簡(jiǎn)單的分析并進(jìn)行代碼實(shí)戰(zhàn)。
2023-05-12 11:40:521726 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論