我們?yōu)榱?b class="flag-6" style="color: red">實(shí)現(xiàn)動態(tài)圖像的濾波算法,用串口發(fā)送圖像數(shù)據(jù)到FPGA開發(fā)板,經(jīng)FPGA進(jìn)行圖像處理算法后,動態(tài)顯示到VGA顯示屏上,前面我們把硬件平臺已經(jīng)搭建完成了,后面我們將利用這個(gè)硬件基礎(chǔ)平臺
2019-01-02 16:26:23 4706
4706 10種濾波算法
2017-07-28 11:16:48
包含內(nèi)容:1.10種軟件濾波的方法 2.單片機(jī)數(shù)字濾波算法研究3.濾波算法程序
2017-10-13 09:29:02
computation)。源于對鳥群捕食的行為研究。粒子群優(yōu)化算法的基本思想:是通過群體中個(gè)體之間的協(xié)作和信息共享來尋找最優(yōu)解.PSO的優(yōu)勢:在于簡單容易實(shí)現(xiàn)并且沒有許多參數(shù)的調(diào)節(jié)。目前已被廣泛應(yīng)用于函數(shù)優(yōu)化
2021-07-07 06:04:36
本帖最后由 shkslc 于 2013-10-10 10:25 編輯
跟蹤算法簡介AVT21提供了多種跟蹤算法:質(zhì)心跟蹤算法(Centroid)、多目標(biāo)跟蹤算法(MTT)、相關(guān)跟蹤算法
2013-09-29 08:59:37
,并具有良好的普適性。因此,AVT31不是單純的視頻目標(biāo)取差器,而是一個(gè)完整的自動視頻跟蹤系統(tǒng)解決方案。內(nèi)置多種圖像增強(qiáng)預(yù)處理算法:白熱、黑熱、雙極性、移動目標(biāo)檢測等。視頻捕獲:可根據(jù)目標(biāo)的亮度、尺寸
2013-09-05 11:14:16
采集數(shù)據(jù)中的量化噪聲,在進(jìn)行數(shù)據(jù)壓縮前采用濾波的預(yù)處理技術(shù)。介紹LZW算法和滑動濾波算法的基本理論,詳細(xì)闡述用單片F(xiàn)PGA實(shí)現(xiàn)兩種算法的方法。最終測試結(jié)果表明,該設(shè)計(jì)方案能夠有效濾除數(shù)據(jù)中的高頻噪聲
2010-04-24 09:05:21
三方面的視頻;2、就是圖像視頻處理算法,包含目標(biāo)檢測跟蹤算法、圖像增強(qiáng)、透霧、拼接、電子穩(wěn)像等算法的程序實(shí)現(xiàn)優(yōu)化工作。3、做出一個(gè)可視化界面,在界面上操作這些算法,觀看這些算法的效果。4、做出產(chǎn)品,將算法放到嵌入式系統(tǒng)中,使得這個(gè)嵌入式系統(tǒng)具有我們想要的功能,比如目標(biāo)跟蹤功能。
2016-01-18 16:23:54
迭代實(shí)現(xiàn)跟蹤,以及加入放射變換,目標(biāo)預(yù)測,焦點(diǎn)提取功能,以適應(yīng)更為復(fù)雜的環(huán)境來跟蹤。后期在PC上調(diào)試好,還需在DSP上調(diào)試好,具體優(yōu)化要求還要根據(jù)視頻源來定。努力做到最優(yōu)。
2015-09-09 16:59:45
是測試其提供的例程b.將目標(biāo)跟蹤算法移植到計(jì)算棒中,主要是量化等的工作c.將計(jì)算棒接入到目前的RK3399的平臺事項(xiàng)PTZ相機(jī)的控制,最終實(shí)現(xiàn)視頻會議中目標(biāo)跟蹤算法
2020-06-30 15:50:16
概率密度的逼近程度來緩解樣本退化問題,通過改進(jìn)再采樣實(shí)現(xiàn)過程來緩解樣本枯竭問題.把新算法應(yīng)用到INS/GPS組合導(dǎo)航系統(tǒng)中,仿真結(jié)果表明新算法的估計(jì)性能明顯優(yōu)于粒子濾波【關(guān)鍵詞】:粒子濾波;;最大期望算法
2010-04-24 09:04:09
隨著基于模型設(shè)計(jì)的廣泛應(yīng)用,模型在環(huán)仿真也逐漸多了起來,我們今天介紹幾種嵌入式常用濾波算法的matlab實(shí)現(xiàn)。一、采用數(shù)字濾波算法克服隨機(jī)干擾的誤差具有以下優(yōu)點(diǎn):數(shù)字濾波無需其他的硬件成本,只用一個(gè)
2021-12-21 08:32:58
卡爾曼濾波算法對比其他的濾波算法有什么優(yōu)點(diǎn)
2023-10-11 06:42:24
卡爾曼濾波算法是怎么實(shí)現(xiàn)對數(shù)據(jù)的預(yù)測處理的
2023-10-10 08:28:02
階段步長調(diào)整過程中的不足,實(shí)現(xiàn)了對SVS-LMS算法的改進(jìn)。理論分析和計(jì)算機(jī)仿真結(jié)果表明,本算法的收斂性能優(yōu)于SVS-LMS算法。另外,還對本算法與VS-LMS算法進(jìn)行了比較,仿真結(jié)果表明本算法在低
2010-04-26 16:12:54
和大小,得到當(dāng)前幀中目標(biāo)的尺寸和質(zhì)心位置。在介紹Intel公司的開源OpenCV計(jì)算機(jī)視覺庫的基礎(chǔ)上,采用CAMSHIFT跟蹤算法,實(shí)現(xiàn)運(yùn)動目標(biāo)跟蹤,解決了跟蹤目標(biāo)發(fā)生存在旋轉(zhuǎn)或部分遮擋等復(fù)雜情況下的跟蹤
2014-12-23 14:21:51
目標(biāo)跟蹤的處理要求。后續(xù)的本博客的第二個(gè)部分《QT+OpenCv實(shí)現(xiàn)在410c開發(fā)板上實(shí)現(xiàn)視頻目標(biāo)追蹤預(yù)研——(二)粒子濾波算法測試》將在此基礎(chǔ)上,進(jìn)一步在上位機(jī)平臺上搭建粒子濾波視頻目標(biāo)跟蹤系統(tǒng)對粒子濾波算法性能進(jìn)行測試,進(jìn)一步驗(yàn)證其在DragonBoard 410c平臺上實(shí)現(xiàn)的可行性。
2018-09-21 10:42:31
自適應(yīng)濾波器設(shè)計(jì)是典型的多參數(shù)組合優(yōu)化問題,利用一種改進(jìn)的粒子群優(yōu)化算法(MPSO)來優(yōu)化設(shè)計(jì)自適應(yīng)LMS濾波器.將濾波器設(shè)計(jì)問題轉(zhuǎn)化為濾波器參數(shù)優(yōu)化的問題,利用改進(jìn)的粒子群算法MPSO搜索整個(gè)參數(shù)
2010-04-26 16:13:08
1、引言 隨著現(xiàn)代高速處理器的迅猛發(fā)展,圖像處理技術(shù)也日益成熟。其中,移動目標(biāo)的視頻檢測與跟蹤是圖像處理、分析應(yīng)用的一個(gè)重要領(lǐng)域,是當(dāng)前相關(guān)領(lǐng)域的研究前沿。移動目標(biāo)視頻檢測與跟蹤技術(shù),在機(jī)器人
2019-06-26 06:09:46
` 本帖最后由 ninghechuan 于 2017-9-1 07:04 編輯
在這一篇開篇之前,我需要解決一個(gè)問題,上一篇我們實(shí)現(xiàn)了基于FPGA的均值濾波算法的實(shí)現(xiàn),最后的顯示效果圖上發(fā)現(xiàn)有
2017-09-01 07:04:36
` 本帖最后由 ninghechuan 于 2017-8-30 08:20 編輯
我們?yōu)榱?b class="flag-6" style="color: red">實(shí)現(xiàn)動態(tài)圖像的濾波算法,用串口發(fā)送圖像數(shù)據(jù)到FPGA開發(fā)板,經(jīng)FPGA進(jìn)行圖像處理算法后,動態(tài)顯示到
2017-08-28 11:34:10
目標(biāo)跟蹤算法的研究,并加入噪聲干擾,更接近真實(shí)的軍事與民用環(huán)境。首先搭建紅外/雷達(dá)雙模導(dǎo)引頭仿真平臺,進(jìn)而設(shè)計(jì)基于多傳感器的多模型機(jī)動目標(biāo)跟蹤算法,采用擴(kuò)展卡爾曼濾波,最終實(shí)現(xiàn)算法的軟件仿真及跟蹤性能
2018-12-05 15:16:23
作者:Joy Yang1.什么是姿態(tài)融合算法簡單來說,姿態(tài)融合算法就是融合多種運(yùn)動傳感器數(shù)據(jù)(一般需要3軸加速度, 3軸陀螺儀或者3軸地磁感應(yīng)傳感器),通過數(shù)字濾波算法容錯(cuò)補(bǔ)償,實(shí)現(xiàn)當(dāng)前姿態(tài)檢測
2019-07-19 06:47:49
對ADC數(shù)據(jù)進(jìn)行濾波可以用中值濾波算法嗎
2023-10-09 06:29:24
前言大家好,我是小麥在往期的文章中,曾經(jīng)介紹過PWM,SPWM,還有SVPWM的實(shí)現(xiàn),另外還有PID輸入輸出的時(shí)間響應(yīng);對不同濾波算法的測試,這些如果只通過單純的數(shù)據(jù)就變得十分的不直觀;這...
2021-11-30 07:43:06
常用的經(jīng)典濾波算法有哪些??
2012-07-01 15:15:23
怎么評估一個(gè)濾波算法的濾波效果
2023-10-10 07:31:46
分布式的濾波器算法是什么?一種基于FPGA分布式算法的濾波器設(shè)計(jì)實(shí)現(xiàn)
2021-04-29 07:13:23
軟件算法實(shí)現(xiàn)數(shù)字濾波問題:解決方法:數(shù)字濾波算法優(yōu)點(diǎn):限幅濾波算法:原理描述:適用場景:參考代碼:中值濾波算法:原理描述:適用場景:參考代碼:算術(shù)平均濾波算法:原理描述:適用場景:參考代碼:加權(quán)平均
2022-01-20 06:58:14
單片機(jī)主要作用是控制外圍的器件,并實(shí)現(xiàn)一定的通信和數(shù)據(jù)處理。但在某些特定場合,不可避免地要用到數(shù)學(xué)運(yùn)算,盡管單片機(jī)并不擅長實(shí)現(xiàn)算法和進(jìn)行復(fù)雜的運(yùn)算。下面主要是介紹如何用單片機(jī)實(shí)現(xiàn)數(shù)字濾波。在單片機(jī)
2022-01-18 07:00:34
針對視頻運(yùn)動參數(shù)捕獲系統(tǒng)中標(biāo)記點(diǎn)無法被正確匹配及跟蹤的問題,提出一種多目標(biāo)三維立體跟蹤算法。該算法通過二維和三維卡爾曼濾波預(yù)測來標(biāo)記點(diǎn)的位置,并利用三維立體匹
2009-04-08 09:00:55 21
21 為提高含噪視頻序列的質(zhì)量和效果,提出一種基于開關(guān)噪聲檢測與三維中值濾波相結(jié)合的開關(guān)3-D中值濾波算法。該算法通過判斷視頻序列的每一個(gè)像素點(diǎn),對噪聲點(diǎn)用3-D中值濾波處
2009-04-23 09:32:5617 粒子濾波技術(shù)通過非參數(shù)化的蒙特卡羅模擬方法實(shí)現(xiàn)遞推貝葉斯濾波,適用于非線性目標(biāo)運(yùn)動模型、非高斯噪聲的目標(biāo)跟蹤。在實(shí)際應(yīng)用中,初始粒子選取的精度對濾波效果往往
2009-06-16 11:36:3313 在實(shí)際系統(tǒng)中,常用的數(shù)據(jù)融合方法是基于擴(kuò)展的卡爾曼濾波算法的融合算法,但是這種融合算法的跟蹤精度并不是很高. 通過對濾波跟蹤型數(shù)據(jù)融合的研究,提出了基于轉(zhuǎn)換測量值卡爾
2009-07-14 11:28:0015 一種基于粒子濾波的自適應(yīng)相關(guān)跟蹤算法:相關(guān)跟蹤是最常見的一種目標(biāo)跟蹤方法,但傳統(tǒng)相關(guān)跟蹤采取的“峰值”跟蹤方法拋棄了所有小于峰值點(diǎn)相關(guān)值的位置點(diǎn)的信息,不夠穩(wěn)健,受
2009-11-08 16:44:0635 針對被動傳感器陣列中的機(jī)動目標(biāo)跟蹤問題,該文提出了一種基于多模Rao-Blackwellized 粒子濾波的機(jī)動目標(biāo)跟蹤新方法。算法首先基于Rao-Blackwellization 理論將機(jī)動目標(biāo)跟蹤問題劃分為
2009-11-20 15:24:4611 該文提出一種自適應(yīng)粒子濾波算法。首先建立目標(biāo)的顏色模型,提出基于加權(quán)顏色分布圖的目標(biāo)顏色模型。采用該模型計(jì)算目標(biāo)模板與粒子區(qū)域的相似程度,以此作為對目標(biāo)物體定
2009-11-24 15:46:1615 針對粒子濾波運(yùn)算量大,硬件復(fù)雜性高的問題,該文提出了一種用于純方位跟蹤的簡化粒子濾波算法,該算法引入了一種新的基于閾值的重采樣方法,降低了硬件實(shí)現(xiàn)的復(fù)雜度。在
2009-11-25 15:15:439 非線性估計(jì)領(lǐng)域的經(jīng)典算法是擴(kuò)展Kalman濾波(EKF),它采用了Taylor展開的線性變換來近似非線性模型,因而存在計(jì)算量大、實(shí)時(shí)性差、估計(jì)精度低等缺點(diǎn)。而粒子濾波采用一些帶有
2010-01-18 11:42:1428 僅用單一的顏色特征進(jìn)行跟蹤是大多數(shù)跟蹤算法魯棒性不高的主要原因。針對此問題,該文提出一種多特征融合跟蹤算法。該算法利用顏色和紋理特征表示目標(biāo),通過均值遷移和粒
2010-02-09 11:39:3719 介紹了3種最基本非線性濾波算法——擴(kuò)展卡爾曼濾波(EKF)、無跡卡爾曼濾波(UKF)和粒子濾波(PF)算法的理論在機(jī)動目標(biāo)跟蹤中的應(yīng)用。通過仿真試驗(yàn)對三者性能進(jìn)行了分析比較。
2010-07-08 15:34:5616 設(shè)計(jì)內(nèi)容:1.了解視頻圖像動態(tài)跟蹤的應(yīng)用背景2.了解視頻圖像動態(tài)跟蹤算法的基本原理3.掌握camshift和Meanshift跟蹤算法的基本原理4.編程實(shí)現(xiàn)camshift算法并進(jìn)行實(shí)驗(yàn)驗(yàn)證
2010-11-16 01:03:4742 本文采用的圖像是256×256大小的灰度圖像,濾波模板3×3大小。如何設(shè)計(jì)硬件電路來完成上述空域濾波算法,分析上述算法實(shí)現(xiàn)過程,可以得出結(jié)論,實(shí)現(xiàn)空域濾波算法可采用3個(gè)三階的FIR濾波器+延時(shí)單元來描述。
2011-01-18 12:12:47837 
隨著目標(biāo)運(yùn)動的多樣性和復(fù)雜化,雷達(dá)非線性目標(biāo)跟蹤算法越來越受到重視。本文對目前 非線性濾波 的主要算法即擴(kuò)展卡爾曼濾波、不敏卡爾曼濾波、粒子濾波的濾波模型、適用條件
2011-07-11 10:55:1162 針對粒子濾波(Particle filter)算法的粒子衰退和計(jì)算量過大問題,提出一種將P-N跟蹤器與粒子濾波算法結(jié)合的目標(biāo)跟蹤方法。首先構(gòu)造P-N跟蹤器,利用跟蹤器來確定目標(biāo)區(qū)域范圍并輸
2011-09-19 15:33:570 CAMSHIFT算法是一種基于顏色直方圖的目標(biāo)跟蹤算法。在視頻跟蹤過程中,CAMSHIFT算法利用選定目標(biāo)的顏色直方圖模型得到每幀圖像的顏色投影圖,并根據(jù)上一幀跟蹤的結(jié)果自適應(yīng)調(diào)整搜索
2011-11-07 14:47:55923 建立了雙觀測站被動跟蹤系統(tǒng)的非線性濾波模型,通過擴(kuò)展卡爾曼濾波方法在該非線性模型下的具體實(shí)現(xiàn)步驟。分析了目標(biāo)通過不同角度向觀測站襲來時(shí),卡爾曼濾波算法對目標(biāo)參數(shù)估計(jì)的
2012-04-18 15:32:3450 利用粒子濾波實(shí)現(xiàn)行人跟蹤是視頻智能監(jiān)控的主要方法之一,但粒子濾波的粒子退化問題尚未得到一個(gè)比較理想的解決方法。本文利用重采樣后的粒子集,構(gòu)造經(jīng)驗(yàn)分布函數(shù),用支持向
2013-08-20 16:57:020 為了解決再入階段的彈道目標(biāo)跟蹤問題,提出一種修正的強(qiáng)跟蹤濾波算法,即強(qiáng)跟蹤有限差分濾波算法(STFDEKF)。修正的強(qiáng)跟蹤算法做出來以下改進(jìn):使用有限差分方法來近似多項(xiàng)式,不需要求解非線性函數(shù)的導(dǎo)數(shù);其次,新算法中使用強(qiáng)跟蹤的次優(yōu)漸消因子對先驗(yàn)協(xié)方差矩陣進(jìn)行修正。
2015-12-21 10:00:1312 卡爾曼濾波算法C語言實(shí)現(xiàn) 可以運(yùn)行STM32 和 arduino上 已測試成功
2016-09-27 16:34:1667 一種優(yōu)化高斯粒子濾波的載波頻偏估計(jì)算法_焦玲
2017-01-07 18:56:131 基于Kalman濾波器和改進(jìn)Camshift算法的雙眼跟蹤_王麗
2017-01-07 19:00:391 基于重采樣技術(shù)改進(jìn)的粒子濾波算法_李小婷
2017-01-07 20:49:271 改進(jìn)的粒子濾波單通道盲分離算法_馬歡
2017-01-08 11:13:290 在QT+OpenCV實(shí)現(xiàn)在410c開發(fā)板上實(shí)現(xiàn)視頻目標(biāo)追蹤預(yù)研系列內(nèi)容呢的前面兩個(gè)博客中已經(jīng)對目標(biāo)跟蹤算法的選擇進(jìn)行了介紹,確定了使用粒子濾波作為視頻目標(biāo)跟蹤,并在上位機(jī)上對粒子濾波算法進(jìn)行了簡單的測試驗(yàn)證了采用粒子濾波算法來實(shí)現(xiàn)目標(biāo)跟蹤的可行性。
2017-02-23 10:33:322887 目標(biāo)跟蹤算法作為一種有著非常廣泛的應(yīng)用的算法,在航空航天、智能交通、智能設(shè)備等領(lǐng)域有著非常廣泛的應(yīng)用。本系列博客將教大家在410c開發(fā)板上基于linux操作系統(tǒng)環(huán)境,采用QT+Opencv來實(shí)現(xiàn)視頻
2017-02-27 10:32:475141 
相控陣PD雷達(dá)目標(biāo)檢測的實(shí)時(shí)空間濾波算法_鄧志象
2017-03-15 09:42:493 改進(jìn)粒子濾波的無線傳感器網(wǎng)絡(luò)目標(biāo)跟蹤算法_丁婷婷
2017-03-19 19:04:390 基于核相關(guān)濾波器的目標(biāo)旋轉(zhuǎn)跟蹤算法_李龍
2017-03-19 19:25:560 ) VECx技術(shù)以加速電路的計(jì)算性能,分析與評估硬件與軟件對實(shí)現(xiàn)FIR濾波算法的影響。實(shí)驗(yàn)結(jié)果表明,采用硬件等效替代的方法能使單個(gè)FIR濾波能
2017-11-03 10:29:5210 特性,增加了樣本的多樣性,克服了重采樣過程中的粒子退化問題,并針對二維平面機(jī)動模型進(jìn)行仿真。仿真實(shí)驗(yàn)表明,本文算法能夠適用于機(jī)載無源定位系統(tǒng),能夠有效的提高濾波精度,跟蹤性能優(yōu)于經(jīng)典的粒子濾波算法。
2017-11-08 15:32:321 為了解決 Kalman濾波算法跟蹤精度低,計(jì)算量大的問題,提出了光電跟蹤目標(biāo)的貫序濾波算法。該算法將 Kalman濾波原理拓展到對測量矢量按照俯仰、方位、距離的順序逐個(gè)進(jìn)行濾波處理。并將前一個(gè)測量
2017-11-10 16:36:003 -濾波算法是一種高效濾波算法,常用于對勻速直線運(yùn)動的跟蹤。為了解決船用ARPA雷達(dá)追蹤定位實(shí)時(shí)性和準(zhǔn)確性的矛盾,提出使用-濾波算法對目標(biāo)航跡進(jìn)行濾波。在確保精度要求的同時(shí),能夠快速定位目標(biāo),并計(jì)算
2017-11-14 11:43:343 中以先驗(yàn)概率密度函數(shù)作為建議分布所引發(fā)的退化問題;運(yùn)用優(yōu)化組合重采樣策略保證所有粒子的信息以一定概率得到繼承,維持粒子集中粒子的多樣性。理論分析與仿真結(jié)果均表明,改進(jìn)算法能有效地解決標(biāo)準(zhǔn)粒子濾波存在的粒子退化問題并避免
2017-11-17 17:42:4810 針對經(jīng)過多次迭代之后粒子濾波因粒子匱乏,對于光照、遮擋與旋轉(zhuǎn)等問題會出現(xiàn)跟蹤精度下降,甚至失敗等問題,提出了一種似然分布自適應(yīng)調(diào)整ALD方法,根據(jù)噪聲因子的大小來自適應(yīng)調(diào)整似然分布狀態(tài),增加先驗(yàn)
2017-11-21 08:52:120 為解決相關(guān)濾波器(CF)在跟蹤快速運(yùn)動目標(biāo)時(shí)存在跟蹤失敗的問題,提出一種結(jié)合了核相關(guān)濾波( KCF)跟蹤器和基于光流法的檢測器的長時(shí)核相關(guān)濾波(LKCF)跟蹤算法。首先,使用跟蹤器跟蹤目標(biāo),并計(jì)算所
2017-12-05 08:44:400 針對粒子濾波中存在粒子質(zhì)量低和粒子貧化的問題,提出了一種基于智能粒子濾波的多傳感器信息融合算法。該算法分為兩個(gè)模塊,首先,將多傳感器數(shù)據(jù)發(fā)送給相應(yīng)的粒子濾波計(jì)算模塊,以優(yōu)化粒子分布為目的更新建議分布
2017-12-08 17:08:371 針對基于Cubature粒子濾波的蒙特卡羅定位(CMCL)算法存在的計(jì)算量大、實(shí)時(shí)處理能力較差的問題,提出一種基于自適應(yīng)多提議分布粒子濾波的蒙特卡羅定位( AMPD-MCL)算法。該算法
2017-12-14 11:43:472 本課題的主要內(nèi)容是在MATLAB上實(shí)現(xiàn)自適應(yīng)濾波器的設(shè)計(jì)。課題的具體內(nèi)容為利用GUI界面設(shè)計(jì)出濾波器的選擇界面、參數(shù)的輸入界面、結(jié)果分析圖等。其中濾波器的設(shè)計(jì)將會用兩種算法實(shí)現(xiàn)既LMS算法和RLS算法。
2017-12-14 16:24:4536801 
均值濾波是典型的線性濾波算法,它是指在圖像上對目標(biāo)像素給一個(gè)模板,該模板包括了其周圍的臨近像素(以目標(biāo)像素為中心的周圍個(gè)像素,構(gòu)成一個(gè)濾波模板,即去掉目標(biāo)像素本身),再用模板中的全體像素的平均值來代替原來像素值。
2017-12-19 15:35:316371 針對標(biāo)準(zhǔn)粒子群優(yōu)化(PSO)算法在求解過程中存在求解精度低、搜索后期收斂速度慢等問題,提出一種基于粒子濾波重采樣步驟與變異操作相結(jié)合的改進(jìn)PSO算法-RSPSO。該算法充分利用重采樣中具有較大
2017-12-20 16:20:510 對三維點(diǎn)云數(shù)據(jù)進(jìn)行曲率估計(jì),并對現(xiàn)有點(diǎn)云雙邊濾波進(jìn)行改進(jìn),增強(qiáng)其魯棒性和保特征性;最后使用改進(jìn)的雙邊濾波對小尺度噪聲進(jìn)行光順,實(shí)現(xiàn)三維點(diǎn)云數(shù)據(jù)模型的去噪、光順。與單獨(dú)使用雙邊濾波、Fleishman雙邊濾波相比,改進(jìn)算法
2018-01-05 10:51:022 區(qū)域之間的對比度被作為目標(biāo)評判雙準(zhǔn)則,而目標(biāo)函數(shù)(或似然函數(shù))則由兩個(gè)準(zhǔn)則的加權(quán)融合而成。算法是在粒子濾波框架下實(shí)現(xiàn)的目標(biāo)搜索,并采用了模糊邏輯對相似度和對比度的權(quán)值進(jìn)行自適應(yīng)調(diào)節(jié)。對人、動物等多個(gè)挑戰(zhàn)性運(yùn)動
2018-01-08 10:39:200 視覺跟蹤問題是當(dāng)前計(jì)算機(jī)視覺領(lǐng)域中的熱點(diǎn)問題,而在動態(tài)環(huán)境中對運(yùn)動目標(biāo)進(jìn)行實(shí)時(shí)、魯棒的跟蹤是其重要的組成部分,視覺跟蹤在自動監(jiān)控、人機(jī)交互、醫(yī)學(xué)圖像處理、虛擬現(xiàn)實(shí)等領(lǐng)域有著廣泛的應(yīng)用。常用的用于目標(biāo)
2018-01-25 11:49:373 針對航拍視頻的特性,對經(jīng)典的壓縮跟蹤( Compression tracking,CT)算法進(jìn)行了研究,發(fā)現(xiàn)了CT算法在樣本采集和分類取樣步驟中的不足并進(jìn)行了相應(yīng)的改進(jìn)。采用Kalman濾波器預(yù)測
2018-02-27 14:17:411 研究了一種基于多線索融合的目標(biāo)跟蹤算法并在TI DM3730上實(shí)現(xiàn)。該算法結(jié)合在線AdaBoost和顏色目標(biāo)跟蹤算法,選用Haar小波和核顏色直方圖兩種特征類型,利用粒子的狀態(tài)散度矩陣的行列式
2018-03-05 16:36:121 關(guān)鍵詞:DaVinci , SoC , 跟蹤算法 , 視頻 目標(biāo)跟蹤作為計(jì)算機(jī)視覺的一個(gè)極具挑戰(zhàn)性的研究任務(wù),已被廣泛的應(yīng)用在人機(jī)交互、智能監(jiān)控、醫(yī)學(xué)圖像處理等領(lǐng)域中。目標(biāo)跟蹤的本質(zhì)是在圖像序列
2018-11-14 11:32:02248 提出了一種實(shí)用的圖像濾波算法,即圖像加窗中值濾波算法。在分析經(jīng)典中值濾波算法基礎(chǔ)上,給出了加窗中值濾波算法的基本原理與實(shí)現(xiàn)過程,與經(jīng)典的鄰域均值濾波器、中值濾波器、Buttenvorth低通濾波器、Wiener濾波器進(jìn)行了濾波比較實(shí)驗(yàn),分別從主觀效果及客觀參數(shù)計(jì)算兩個(gè)方面驗(yàn)證了其優(yōu)良的濾波性能。
2018-11-30 11:11:224 Mean Shift收斂性分析, 使用收斂后的粒子集表達(dá)目標(biāo)的當(dāng)前狀態(tài); 以狀態(tài)粒子的坐標(biāo)位置為特征值對其進(jìn)行Mean Shift 聚類, 作為對目標(biāo)的量測。 連續(xù)跟蹤時(shí), 下一幀的采樣粒子基于上一幀的量測結(jié)果產(chǎn)生。 與傳統(tǒng)的基于序貫重要性采樣的粒子濾波方法相比
2018-12-13 16:05:002 為了解決核化相關(guān)濾波器( KCF)在復(fù)雜場景下魯棒性差的問題,提出了基于自適應(yīng)組合核(SACK)的目標(biāo)跟蹤算法。跟蹤任務(wù)分為位置跟蹤和尺度跟蹤兩個(gè)獨(dú)立部分。首先,以線性核和高斯核的自適應(yīng)組合作為核跟蹤濾波器,構(gòu)造了SACK權(quán)重的風(fēng)險(xiǎn)目標(biāo)函數(shù)。
2018-12-19 14:05:383 本文檔的主要內(nèi)容詳細(xì)介紹的是十大濾波算法的資料介紹包括了:限幅濾波法(程序判斷濾波法),中位值濾波法,算術(shù)平均濾波法,遞推平均濾波法(滑動平均濾波法),中位值平均濾波法,限幅平均濾波法,一階滯后濾波法,加權(quán)遞推平均濾波法,消抖濾波法,限幅消抖濾波法。
2019-01-04 08:00:0028 為提高分層卷積相關(guān)濾波視覺跟蹤算法的實(shí)時(shí)性能,提出一種稀疏卷積特征的實(shí)時(shí)目標(biāo)跟蹤算法。首先,在分析不同層卷積特征的基礎(chǔ)上,采用等間隔采樣的方式提取每個(gè)卷積層的稀疏卷積特征;然后,對每個(gè)卷積層特征
2019-01-17 15:12:441 性,提出一種基于次優(yōu)視差的多模濾波目標(biāo)跟蹤算法。首先,采用目標(biāo)不確定性橢球投影面積變化最大的方向?yàn)榇蝺?yōu)視差方向,并將其作為機(jī)器人視差控制方向;然后,采用多模濾波算法計(jì)算目標(biāo)各種運(yùn)動方式的概率;其次,對各運(yùn)動方式的目標(biāo)狀態(tài)進(jìn)
2019-03-28 13:41:126 這篇文章將非常詳細(xì)地介紹計(jì)算機(jī)視覺領(lǐng)域中的目標(biāo)跟蹤,尤其是相關(guān)濾波類方法,分享一些作者認(rèn)為比較好的算法。
2019-07-05 10:15:265304 針對純測距條件下移動傳感器網(wǎng)絡(luò)中的目標(biāo)跟蹤冋題,提岀一種基于非線性濾波和多維標(biāo)度的目標(biāo)跟蹤算法。根據(jù)傳感器和目標(biāo)之間存在的相對運(yùn)動,建立帶約束的動態(tài)距離模型,利用無跡卡爾曼濾波算法提高模型對距離
2021-03-17 10:50:2011 多模板尺度自適應(yīng)核相關(guān)濾波器( KCF MTSA)跟蹤算法在目標(biāo)移動模糊、旋轉(zhuǎn)和尺度變化時(shí)跟蹤距離精度與成功率較低。針對該問題,提岀一種結(jié)合多特征和尺度估計(jì)的改進(jìn) KCF MTSA目標(biāo)跟蹤算法。采用
2021-03-23 15:30:369 中值濾波和多級中值濾波的特點(diǎn)和適用范圍,針對濾波算法的鄰域性特點(diǎn),設(shè)計(jì)了基于FPGA的濾波器整體架構(gòu),并設(shè)計(jì)了標(biāo)準(zhǔn)中值濾波和多級巾值濾波兩種濾波算法的FPGA實(shí)現(xiàn)方案和功能仿真.同時(shí)通過實(shí)驗(yàn)結(jié)果對兩種算法的濾波效果進(jìn)行比
2021-04-01 11:21:4841 傳統(tǒng)相關(guān)濾波方法在目標(biāo)運(yùn)動模糊和光照變化上取得了一定的魯棒效果,但當(dāng)目標(biāo)存在形變、顏色變化、重度遮擋等干擾因素時(shí)難以實(shí)現(xiàn)跟蹤,魯棒性差,且當(dāng)目標(biāo)丟失后不能再恢復(fù),無法實(shí)現(xiàn)長時(shí)間跟蹤。因此,文中
2021-04-23 14:31:347 目標(biāo)漏跟。針對該問題,在多伯努利濾波框架下,深度分析目標(biāo)的特征信息,引λ抗干擾的卷積特征,提出基于卷積特征的多伯努利視頻多目標(biāo)跟蹤算法,并在目標(biāo)狀態(tài)提取過程中,進(jìn)一步提岀模板更新,使用自適應(yīng)學(xué)習(xí)速率進(jìn)行更新
2021-05-12 15:18:1111 當(dāng)被跟蹤目標(biāo)受變形、遮擋、快速和不規(guī)則運(yùn)動等因素的干擾時(shí),基于單一顏色特征的相關(guān)濾波器跟蹤算法難以實(shí)現(xiàn)精準(zhǔn)的目標(biāo)定位。為此,分析基于多通道顏色特征 Color Names(CN)的核相關(guān)濾波器算法
2021-05-27 15:51:509 針對傳統(tǒng)相關(guān)濾波跟蹤器在目標(biāo)尺度變化和部分遮擋時(shí)效果不佳等問題,基于KCF提出了一種全局塊與局部塊協(xié)作的分塊跟蹤算法。該算法首先根據(jù)目標(biāo)的外觀特征,對跟蹤目標(biāo)進(jìn)行水平或垂直分抉,并分別訓(xùn)練兩個(gè)局部
2021-05-28 16:44:192 標(biāo)準(zhǔn)粒子濾波算法用于無線傳感器網(wǎng)絡(luò)運(yùn)動目標(biāo)跟蹤時(shí),非高斯噪聲環(huán)境會降低其跟蹤精度和計(jì)算效率。針對該問題,結(jié)合多傳感器測量模型和 Kullback- Leibler距離(KLD)采樣方法,提出一種
2021-06-02 16:21:044 結(jié)合卡爾曼濾波等的四旋翼無人機(jī)目標(biāo)跟蹤算法
2021-06-23 15:00:1924 對象跟蹤問題一直是計(jì)算機(jī)視覺的熱點(diǎn)任務(wù)之一,簡單的可以分為單目標(biāo)跟蹤與多目標(biāo)跟蹤,最常見的目標(biāo)跟蹤算法都是基于檢測的跟蹤算法,首先發(fā)現(xiàn)然后標(biāo)記,好的跟蹤算法必須具備REID的能力。今天小編斗膽給大家推薦一個(gè)結(jié)合傳統(tǒng)算法跟深度學(xué)習(xí),特別好用的對象跟蹤算法框架DeepSort
2022-09-14 16:20:052188 粒子濾波器方法通常用于視覺跟蹤。從統(tǒng)計(jì)角度來看,它是一種順序蒙特卡羅重要抽樣方法,用于根據(jù)觀測序列估計(jì)動態(tài)系統(tǒng)的潛狀態(tài)變量。 粒子濾波步驟: 初始狀態(tài):用大量粒子模擬X(t),粒子在空間內(nèi)均勻分布
2023-01-13 10:17:331045 該項(xiàng)目包含使用高級綜合 (HLS) 的 2D 中值濾波器算法的實(shí)現(xiàn)。該項(xiàng)目的目標(biāo)是在不到 3 ms的時(shí)間內(nèi)對測試圖像進(jìn)行去噪,同時(shí)消耗不到 25% 的可用 PL 資源。
2023-07-12 15:19:44718 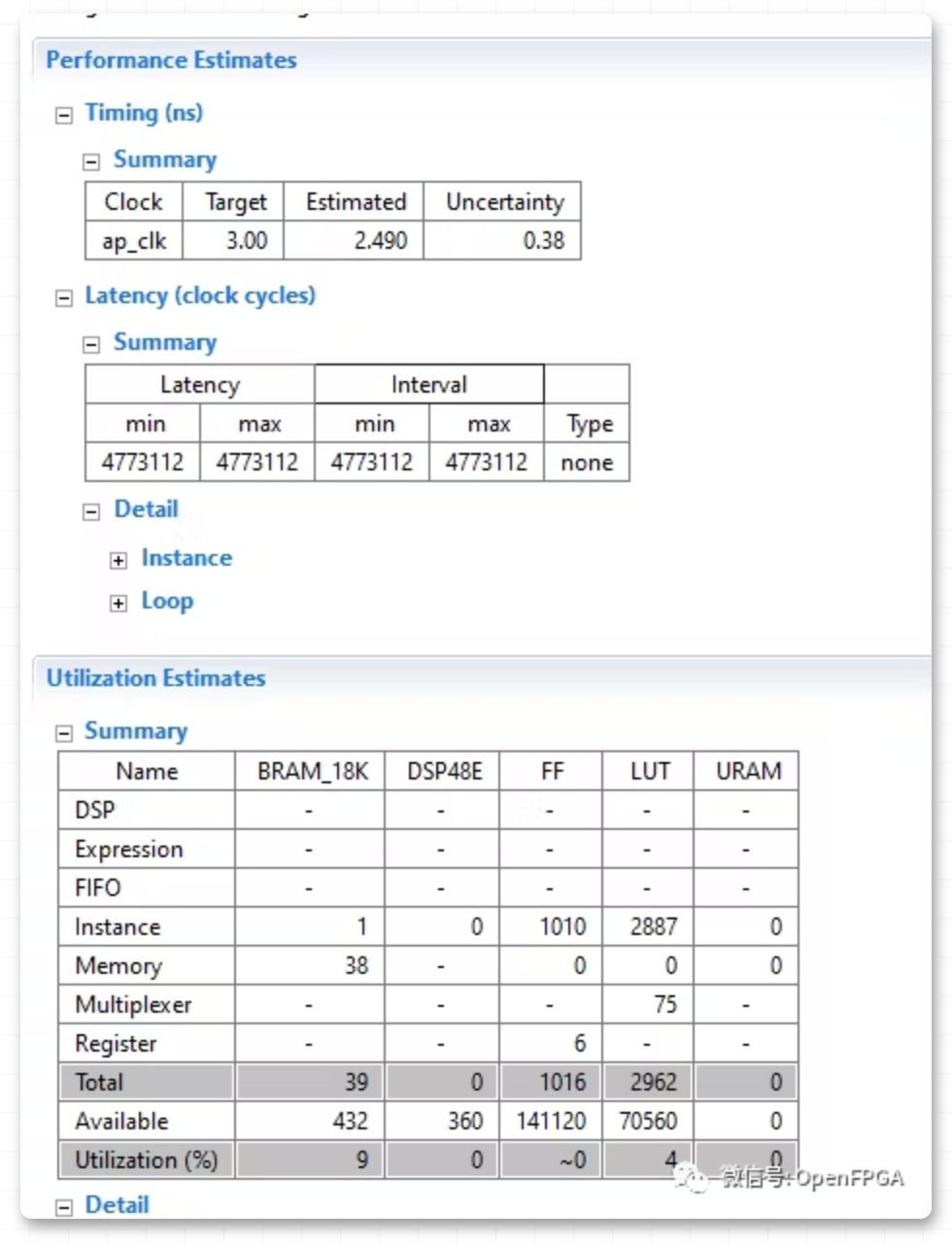
將再啰嗦一次,詳解從均值濾波到非局部均值濾波算法的原理及實(shí)現(xiàn)方式。 細(xì)數(shù)主要的2D降噪算法,如下圖所示,從最基本的均值濾波到相對最好的BM3D降噪,本文將盡量用最同屬的語言,詳解這些算法的實(shí)現(xiàn)流程,并給予一定的 FPGA 加速實(shí)現(xiàn)的實(shí)現(xiàn)
2023-12-19 16:30:02242
正在加载...
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論