 電子發(fā)燒友App
電子發(fā)燒友App


1、前言
LONWorks現(xiàn)場(chǎng)總線是美國(guó)Echelon公司推出的局部操作網(wǎng)絡(luò),它具有統(tǒng)一性、開放性、互操作性及支持多種通信介質(zhì)等優(yōu)良性能,是當(dāng)今最流行的現(xiàn)場(chǎng)總線之一。但是由于LonWorks控制節(jié)點(diǎn)的核心神經(jīng)元芯片(Neuron Chip)的應(yīng)用處理能力相對(duì)較弱,因而對(duì)于復(fù)雜的應(yīng)用常使用主從處理器結(jié)構(gòu),主處理器完成用戶的應(yīng)用功能,而把Neuron芯片作為通信協(xié)處理器。由于可以提高了節(jié)點(diǎn)的處理能力,節(jié)省資金和開發(fā)時(shí)間,因此,具有多功能的通用嵌入式主處理器具有很好的應(yīng)用前景。本文采用的MSP430F149主處理器是TI公司基具有較高的集成度的芯片,簡(jiǎn)化了應(yīng)用系統(tǒng)的硬件設(shè)計(jì),適合作為多用途智能節(jié)點(diǎn)。
2、ShortSTack的介紹和實(shí)現(xiàn)
2.1 ShortStack的結(jié)構(gòu)
ShortStack微服務(wù)器是Echelon公司提供的一套開發(fā)包,其結(jié)構(gòu)圖如下:

由圖可看到,主處理器與ShortStack 微服務(wù)器通信通過ShortStack API函數(shù)來實(shí)現(xiàn),通常使用其中的5個(gè),lonInit(),lonEventHandler(),lonPropagateNv(),lonPollNv()和lonsendServicePin()。ShortStack Micro Server,運(yùn)行ShortStack固件,運(yùn)行LonTalk協(xié)議的1~6層;主處理器運(yùn)行SCI串口驅(qū)動(dòng)程序,運(yùn)行ShortStack API函數(shù),處理與Lonworks其他節(jié)點(diǎn)通信;主處理器應(yīng)用部分調(diào)用ShortStack API函數(shù)。主處理器設(shè)備的接口支持文件,由Neuron C model file 通過使用ShortStack向?qū)懋a(chǎn)生,產(chǎn)生數(shù)據(jù)表定義網(wǎng)絡(luò)變量和收發(fā)器參數(shù)。而Model file只需要聲明網(wǎng)絡(luò)變量NVs,配置屬性CPs和功能模塊FBs,因此,可以不需要熟悉Neuron C。
串行驅(qū)動(dòng)程序?yàn)橹魈幚砥骱蛷奶幚砥髦g提供一個(gè)獨(dú)立的接口。整個(gè)串行驅(qū)動(dòng)程序由兩部分構(gòu)成:上層驅(qū)動(dòng)程序?yàn)橹鲬?yīng)用程序提供一個(gè)接口;底層驅(qū)動(dòng)程序完成與神經(jīng)元芯片的硬件接口。上層和底層驅(qū)動(dòng)之間的數(shù)據(jù)交換通過緩沖隊(duì)列完成。底層驅(qū)動(dòng)程序與從處理器的通訊包括SCI上傳和SCI下傳兩類,SCI上傳是數(shù)據(jù)由神經(jīng)元芯片上傳到主處理器;SCI下傳是數(shù)據(jù)由主處理器下傳到神經(jīng)元芯片。
2.2 ShortStack的軟件實(shí)現(xiàn)
采用提供的Neuron C模板事例修改編寫。主要修改ldvsci.h和ldvsci.c中與MSP430F149處理器相關(guān)的語句。
在ldvsci.h中,修改為:
#define ENABLE_RX_TX() (ME1 | = UTXE0+URXE0)
#define ENABLE_TX_ISR() (IE1 |= 0x80)
#define ENABLE_TX_COMPLETE_ISR() (IFG1|=0x80) //USART0發(fā)送標(biāo)志
#define ENABLE_RX_ISR() (IE1|= 0x40) //enable SCI receive interrupt
#define DISABLE_TX_ISR() (IE1 &= ~0x80)
#define DISABLE_TX_COMPLETE_ISR() (IFG1 &= ~0x80) // USART0發(fā)送標(biāo)志復(fù)位
#define DISABLE_RX_ISR() (IE1 &= ~0x40)
#define CHECK_RTS() (P2OUT& 0x02) // check RTS
#define CHECK_CTS() (P2IN& 0x01) // check CTS
#define ASSERT_RTS() (P2OUT &= ~0x02) // assert RTS
#define DEASSERT_RTS() (P2OUT|= 0x01) // deassert RTS
#define DEASSERT_HRDY() (P2OUT |= 0x04) // deassert _HRDY
#define ASSERT_HRDY() (P2OUT &= ~0x04) // assert _HRDY
在ldvsci.h中,修改了void SysResetSCI(void) ,void SysInit(void),
void SysUpdateWDT(void), @interrupt void RxInt (void)以及@interrupt void TxInt (void)中與MSP430F149相關(guān)的程序。
其他文件做少許改變,其中platform.h定義了BIG_ENDIAN and LITTLE_ENDIAN的區(qū)別,對(duì)應(yīng)于哈佛結(jié)構(gòu)和馮.諾伊曼體系結(jié)構(gòu)。由于MSP430F149核是馮.諾伊曼體系結(jié)構(gòu)的,所以ShortStack需用LITTLE_ENDIAN(即高字節(jié)存在高位地址)。
2.3 ShortStack的硬件件實(shí)現(xiàn)
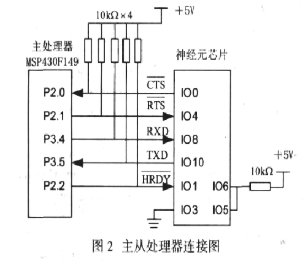
從處理器(如圖2)采用TP/FT-10F控制模塊,該模塊由微型電路板構(gòu)成, 包括一個(gè)3150 芯片、一塊閃存、一個(gè)通信收發(fā)器、電源連接器、I/O 口和網(wǎng)絡(luò)接口, 其中IO_0~I(xiàn)O_10 為神經(jīng)元芯片3150 的11 個(gè)I/O 管腳用于對(duì)控制設(shè)備的連接, DataA 和DataB 是FTT- 10收發(fā)器與網(wǎng)絡(luò)的連接口,它能夠?qū)⒅魈幚砥鹘?jīng)過處理輸出的數(shù)據(jù)發(fā)送到LON 總線,也可以將LON 總線上的消息傳送給主處理器。
主處理器與神經(jīng)元芯片之間的通信采用SCI模式。SCI接口是一個(gè)半雙工串行異步通信接口,通信的格式是:一個(gè)起始位,8個(gè)數(shù)據(jù)位和一個(gè)停止位(LSB在先)。通信模式的選擇由IO3確定,IO3接地選擇SCI通信模式。IO5、IO6則用來選擇通訊速率。
3、μcos_Ⅱ的移植
μcos_Ⅱ的全部源代碼,共16個(gè)文件。移植工作涉及的源文件分為三部分:與處理器無關(guān)的代碼部分,這部分代碼完成操作系統(tǒng)的基本功能,包括10個(gè)文件,即:OS_CORE.C,OS_MBOX.C,OS_MEM.C,OS_Q.C,OS_SEM .C,OS_TASK.C,OS_TIME.C.OS_FLAG.C,OS MUTEX.C,uCOS_II.H。設(shè)置代碼部分,包括OS—CFG.H 和INCLUDES.H 兩個(gè)頭文件,用來進(jìn)行操作系統(tǒng)配置。
最主要的部分是與處理器有關(guān)部分的代碼,包括一個(gè)頭文件OS_CPU.H、一個(gè)C代碼文件OS_CPU_C.C 及一個(gè)匯編文件OS_CPU_A.ASM,將其移植到MSP430F149處理器上,需要修改這3個(gè)與體系結(jié)構(gòu)相關(guān)的文件,代碼量大約是500行。下面分別介紹這3個(gè)文件的移植。
OS_CPU.H這部分代碼包括數(shù)據(jù)類型定義、堆棧單位定義、堆棧增長(zhǎng)方向定義、關(guān)中斷和開中斷的宏定義以及進(jìn)行任務(wù)切換的宏定義等。其中,為了在不同的工作模式下調(diào)用系統(tǒng)的底層接口函數(shù)不受訪問權(quán)限的限制,使用軟中斷SWI。堆棧的單位與CPU的寄存器長(zhǎng)度一致,結(jié)構(gòu)常量OS_STK_GROWTH置1,表示堆棧從由高地址向低地址增長(zhǎng)。
OS_CPU_C.C要求編寫六個(gè)簡(jiǎn)單的c函數(shù):OSTaskSiklnit();OSTaskCreateHook();OSTaskDelHook();OSTaskSwHook();OSTaskStatHook();OSTimeTickHook()唯一必要的函數(shù)是OSTaskStklnit(),其它五個(gè)函數(shù)必須聲明但沒必要包含。對(duì)于OSTaskStklnit()而言,OSTaskCreate()和OSTaskCreateExt()通過調(diào)用OSTaskStkInit()來初始化任務(wù)的堆棧結(jié)構(gòu),OSTaskStkInit()返回堆棧指針?biāo)傅牡刂罚琌STaskCreate()會(huì)獲得該地址并將它保存到任務(wù)控制塊(OS TCB)中。
CPU_ A.ASM要求編寫四個(gè)簡(jiǎn)單的匯編語言函數(shù):OSStartHighRdy();OSCtxSw();
OSIntCtxSw();OSTickISR()。將所有與處理器相關(guān)的代碼放到OS_CPU_C.C文件中,而不必放在一些分散的匯編語言文件中。
(1)OSStartHighRdy():運(yùn)行高優(yōu)先級(jí)就緒任務(wù)函數(shù)OSStartHighRdy()必須調(diào)用OSTaskSwHook(),因?yàn)镺STaskSwHook()可以通過檢查OSRunning而確定是OSStartHighRdy()在調(diào)用它(OSRunning為FALSE)還是正常的任務(wù)切換在調(diào)用它(OSRunning為TRUE)。OSStartHighRdy()還必須在最高優(yōu)先級(jí)任務(wù)恢復(fù)之前和調(diào)用OSTaskSwHook()之后設(shè)置OSRunning為TRUE。
(2)OSCtxSw()、OSIntCtxSw():上下文切換函數(shù)任務(wù)級(jí)的切換是通過發(fā)軟中斷命令來完成的,其中斷向量地址必須指向OSCtxSw()。中斷級(jí)的切換由OSIntExit()通過調(diào)用OSintCtxSw()來執(zhí)行切換功能。
(3)OSTickISR():定時(shí)中斷函數(shù)OSTickISR()函數(shù)主要負(fù)責(zé)進(jìn)人中斷時(shí)保存處理器寄存器內(nèi)容,完成任務(wù)切換退出時(shí)恢復(fù)處理器寄存器內(nèi)容并返回,相當(dāng)于中斷服務(wù)程序的入口。
4、μc/os_Ⅱ與ShortStack的結(jié)合
因?yàn)棣蘡/os_Ⅱ嵌入式操作系統(tǒng)代碼和ShortStack應(yīng)用程序代碼的固有的特征,兩者可以有機(jī)的結(jié)合在一起。μcos_Ⅱ由系統(tǒng)服務(wù),如郵箱、內(nèi)存管理、消息隊(duì)列、信號(hào)量管理等,對(duì)于這些服務(wù)是在OS_CFG.h定義了的,當(dāng)設(shè)計(jì)的系統(tǒng)要使用這些服務(wù)時(shí)只需要將定義的值改為1即可。將ShortStack應(yīng)用程序中的常量定義全部放在OS_CFG.h中。這樣可以同時(shí)對(duì)操作系統(tǒng)各種服務(wù)函數(shù)和ShortStack 的API和APP函數(shù)實(shí)現(xiàn)了裁減。
將ShortStack應(yīng)用程序當(dāng)作μcos_Ⅱ操作系統(tǒng)的一個(gè)任務(wù)運(yùn)行。先定義堆棧,以便保存本任務(wù)在任務(wù)切換時(shí)單片機(jī)的寄存器的當(dāng)前值,當(dāng)μcos_Ⅱ下次調(diào)度到該任務(wù)運(yùn)行時(shí)就可以從堆棧恢復(fù)CPU的值,從而該任務(wù)繼續(xù)運(yùn)行。程序如下:
OS_STK TaskStartStk[TASK_STK_SIZE]; //任務(wù)Task1的任務(wù)堆棧
OS_STK ShortStackStk[TASK_STK_SIZE]; //ShortStack的任務(wù)堆棧
… //其他任務(wù)堆棧
Void main(void)
{
OSInit();
OSTaskCreat(Task1,(void *)0,& TaskStartStk[TASK_STK_SIZE-1],0);
OSTaskCreat(ShortStack,(void *)0,& ShortStackStk[0],2);
… //創(chuàng)建其他任務(wù)
OSStart();
return 0;
}
void ShortStack(void)
{
lonInit();
for(; ; )
{
lonEventHandler();//周期性調(diào)用檢查是否有任何LonWorks事件要處理
}
}
由于μc/os_Ⅱ操作系統(tǒng)沒有任何的硬件驅(qū)動(dòng),所以用戶自己將ShortStack串口驅(qū)動(dòng)、輸入輸出隊(duì)列操作部分?jǐn)U展為該操作系統(tǒng)的一部分。此外,系統(tǒng)可以添加其他特定的任務(wù),通過系統(tǒng)調(diào)度,實(shí)現(xiàn)節(jié)點(diǎn)的合理利用,增加節(jié)點(diǎn)的實(shí)用性。如圖4所示。
最后,將帶有TP/FT-10F控制模塊的MSP430F149芯片接入Gizmo4開發(fā)板,通過Nodebuilder開發(fā)工具編譯,進(jìn)入調(diào)試界面,利用LonMaker連接為兩節(jié)點(diǎn)網(wǎng)絡(luò),測(cè)試兩節(jié)點(diǎn)是否通訊。
5、結(jié)束語
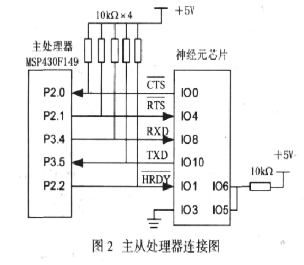
MSP430F149是16bit的RISC微處理器,該處理器特別適用于手持式設(shè)備以及高性價(jià)比、低功耗的網(wǎng)絡(luò)設(shè)備,它集成了中斷控制、功率控制、存儲(chǔ)控制、UART、PWM、ADC等豐富的資源。由于工業(yè)、家庭網(wǎng)絡(luò)化的需求,以及LonWorks總線便捷的入網(wǎng)方式,可以使該多用途智能節(jié)點(diǎn)分散自制,每個(gè)節(jié)點(diǎn)一方面分散地解決其特定的任務(wù),另一方面通過點(diǎn)對(duì)點(diǎn)、點(diǎn)對(duì)多點(diǎn)的通訊,解決節(jié)點(diǎn)之間的信息傳輸,實(shí)現(xiàn)分散基礎(chǔ)上的融合。上位機(jī)要完成對(duì)LON 網(wǎng)絡(luò)的監(jiān)控與管理功能,二者之間必須能進(jìn)行動(dòng)態(tài)數(shù)據(jù)交換。LON 總線技術(shù)還提供了DDE Server 軟件。DDE Server 能夠?qū)崿F(xiàn)LON網(wǎng)絡(luò)和任何具有DDE 功能的Windows 應(yīng)用程序間交換網(wǎng)絡(luò)變量和信息。系統(tǒng)提供給用戶一個(gè)十分友好的人機(jī)界面,用戶可通過上位機(jī)設(shè)置各節(jié)點(diǎn)實(shí)時(shí)運(yùn)行情況以及歷史運(yùn)行記錄、打印等。
責(zé)任編輯:gt









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論