【電路方案】基于單片機(jī)太陽(yáng)能雙軸舵機(jī)自動(dòng)追光路燈系統(tǒng)利用增強(qiáng)型的自帶模數(shù)轉(zhuǎn)換器ADC的51單片機(jī)做的一個(gè)雙軸舵機(jī)驅(qū)動(dòng)的自動(dòng)追光系統(tǒng),可用于太陽(yáng)能系統(tǒng)的自動(dòng)追光,能夠根據(jù)太陽(yáng)光強(qiáng)的變化而調(diào)整太陽(yáng)能電池
2021-11-19 07:42:09
嗨,我附上了JTAG鏈設(shè)計(jì)結(jié)構(gòu)。請(qǐng)看一下。我想在單JTAG鏈中連接CPLD和FPGA。但是,在我的CPLD中,VCCAUX電壓網(wǎng)是1.8V_CPLD而FPGA Bank-0(VCCO_0)電壓網(wǎng)
2020-05-29 14:17:04
CPLD在汽車(chē)制動(dòng)性能檢測(cè)系統(tǒng)中的應(yīng)用汽車(chē)制動(dòng)性是汽車(chē)主動(dòng)安全的主要性能之一,是汽車(chē)行駛安全的重要保障。因此,汽車(chē)的制動(dòng)性能的檢測(cè)研究為其制動(dòng)性能試驗(yàn)研究和生產(chǎn)檢測(cè)提供了條件,為提高制動(dòng)性能提供了
2009-04-16 13:56:57
CPLD程序如何去實(shí)現(xiàn)?CPLD在通信數(shù)據(jù)傳輸中的應(yīng)用是什么?
2021-05-25 06:53:01
雙位置控制器的主要部分是什么?實(shí)現(xiàn)三位置控制器更有效的方法是什么?
2021-04-08 06:50:57
你好,我正在嘗試在Coolrunner2系列CPLD上實(shí)現(xiàn)一個(gè)系統(tǒng)。該系統(tǒng)通過(guò)不同的輸入進(jìn)行控制。其中一個(gè)編碼為2個(gè)字節(jié),在翻譯期間被刪除。[警告]:Cpld:1007- 刪除未使用的輸入
2018-10-08 17:39:45
分辨率和60 RPM的條件下,采樣速率只有1 kHz。在永磁交流伺服電機(jī)中,為了高效率、高動(dòng)態(tài)地產(chǎn)生扭矩,要求正弦定子電流與轉(zhuǎn)子磁體角位置對(duì)齊,如圖2所示。電流和磁場(chǎng)對(duì)齊控制確保電機(jī)扭矩滿足速度環(huán)路
2018-10-22 16:50:51
處理器與通信接口直連。還有一種不那么常見(jiàn)的架構(gòu),即把安全隔離柵分散在功率、控制和通信之間。這會(huì)降低每個(gè)隔離柵的隔離標(biāo)準(zhǔn)要求,而且可以縮小系統(tǒng)的整體尺寸。 圖3. 采用隔離式控制架構(gòu)的雙軸電機(jī)控制系統(tǒng)
2018-10-10 18:13:01
新的精密傳感器的可選方案。 ADIS16209雙軸可編程傾斜計(jì),基于ADI公司的iMEMS集成微電子機(jī)械系統(tǒng)內(nèi)核,當(dāng)它處于水平安裝時(shí),能夠在±30度測(cè)量范圍內(nèi)以小于0.1度的誤差測(cè)量雙軸傾斜。由于
2018-11-16 11:11:46
,基于同一平臺(tái)設(shè)計(jì),采用同樣強(qiáng)大的 HD 控制算法。與采用兩個(gè)獨(dú)立驅(qū)動(dòng)器的系統(tǒng)相比,通過(guò)共享組件和優(yōu)化線路,每根軸可以降低 20% 的成本。 DDHD雙軸伺服驅(qū)動(dòng)器 主要特性: 通過(guò)共享組件和精簡(jiǎn)線...
2021-09-17 08:24:23
的速度是480Mbits/s,完全可以滿足圖像采集、傳輸以及后續(xù)處理的要求。系統(tǒng)中采用 DSP+CPLD的硬件設(shè)計(jì)方案,采用現(xiàn)場(chǎng)可編程芯片 CPLD及兩片 SRAM構(gòu)成的圖像采集和存儲(chǔ)系統(tǒng),可以根據(jù)
2019-06-20 07:31:29
是480Mbits/s,完全可以滿足圖像采集、傳輸以及后續(xù)處理的要求。系統(tǒng)中采用 DSP+CPLD的硬件設(shè)計(jì)方案,采用現(xiàn)場(chǎng)可編程芯片 CPLD及兩片 SRAM構(gòu)成的圖像采集和存儲(chǔ)系統(tǒng),可以根據(jù)
2019-07-26 07:16:41
如何在CPLD內(nèi)部構(gòu)造一個(gè)雙口RAM,實(shí)現(xiàn)DSP從CPLD中讀寫(xiě)數(shù)據(jù)
2015-10-25 17:14:50
/div):控制示波屏上的橫軸,即X軸刻度(時(shí)間/每格),調(diào)節(jié)范圍為(0.10ns/div ~ 1s/div)。 ● Y軸偏移(X position):控制信號(hào)在Y軸的偏移位置,調(diào)節(jié)范圍為(-5
2009-07-10 09:16:15
HCTL-2020 解碼器及其在多關(guān)節(jié)機(jī)器人運(yùn)動(dòng)控制中的應(yīng)用編碼器位置檢測(cè)通道的擴(kuò)展是多軸運(yùn)動(dòng)控制系統(tǒng)開(kāi)發(fā)中經(jīng)常遇到的技術(shù)問(wèn)題。該文詳細(xì)介紹了HCTL -2020 解碼器的工作原理,設(shè)計(jì)了它與DSP
2009-12-17 16:12:31
特設(shè)二路模擬輸出和一路數(shù)字輸出接口,輸出值分別對(duì)應(yīng)(X,Y)雙軸偏移量,其類型為模擬量;按鍵表示用戶是否在Z軸上按下,其類型為數(shù)字開(kāi)關(guān)量。模塊集成電源指示燈,可顯示工作狀態(tài);坐標(biāo)標(biāo)識(shí)符清晰簡(jiǎn)明、準(zhǔn)確
2015-11-13 17:25:30
STM32雙軸搖桿控制空心杯電機(jī)雙軸搖桿傳感器??PS2雙軸按鍵游戲搖桿模塊采用PS2游戲手柄上金屬按鍵搖桿電位器、模塊特設(shè)二路模擬輸出和一路數(shù)字輸出接口、輸出值分別對(duì)應(yīng)(×、Y雙軸偏移量、其類型為
2021-09-07 08:43:58
DCSPI和單線UART雙軸編碼器接口和每軸2x參考開(kāi)關(guān)輸入最高分辨率,每步完成高達(dá)256微步stealthChop用于極其安靜的操作和平穩(wěn)的運(yùn)動(dòng)spreadCycle高動(dòng)態(tài)電機(jī)控制斬波器dcStep負(fù)載相關(guān)
2020-05-27 15:28:20
labview控制雙軸步進(jìn)電機(jī)按照輸出的正弦余弦波形運(yùn)動(dòng)
2020-01-04 11:24:57
拖動(dòng)轉(zhuǎn)子旋轉(zhuǎn),使得檢測(cè)誤差在 180°附近。為解決該問(wèn)題,可以在定子繞組中依次施加三個(gè)互差 120°的電壓矢量,將轉(zhuǎn)子逐步拖動(dòng)到預(yù)期位置,該方法降低了電壓矢量的幅值,同時(shí)也提高了預(yù)定位方法的可靠性
2021-09-07 13:59:38
與編碼器 的絕對(duì)角度一一對(duì)應(yīng)。圖三示出了AS5040、磁鐵磁極、電機(jī)轉(zhuǎn)子磁極,以及電機(jī)定子A相軸線四者間的關(guān)系。
在電機(jī)控制
系統(tǒng)中,常定義轉(zhuǎn)子磁極與定子A相軸線重合時(shí)電機(jī)
位置角為 0,且逆時(shí)針?lè)较驗(yàn)檎?/div>
2021-09-22 09:41:15
`利用增強(qiáng)型的自帶模數(shù)轉(zhuǎn)換器ADC的51單片機(jī),做的一個(gè)雙軸舵機(jī)驅(qū)動(dòng)的自動(dòng)追光系統(tǒng)。`
2021-03-29 15:11:07
基于ADXL345的新型跌倒檢測(cè)解決方案。 iMEMS加速度傳感器ADXL345 iMEMS 半導(dǎo)體技術(shù)把微型機(jī)械結(jié)構(gòu)與電子電路集成在同一顆芯片上。iMEMS加速度傳感器就是利用這種技術(shù),實(shí)現(xiàn)對(duì)單軸、雙
2018-11-02 15:10:18
什么是CPLD,怎么選擇?CPLD在雙軸位置檢測(cè)系統(tǒng)中的應(yīng)用設(shè)計(jì)
2021-04-30 06:24:23
目前市場(chǎng)上有兩種主要的自拍桿產(chǎn)品:?jiǎn)?b class="flag-6" style="color: red">軸自拍桿和三軸自拍桿。自拍桿如何保證手機(jī)的拍攝穩(wěn)定性?攝影師手抖會(huì)導(dǎo)致一軸或三軸自拍桿抖動(dòng),自拍桿的內(nèi)置陀螺儀傳感器可檢測(cè)位置和方向。內(nèi)部 MCU 可以處理數(shù)據(jù)并
2023-04-12 14:02:41
控制,通過(guò)改正工藝來(lái)消除或減少缺陷。通常把光學(xué)影像檢測(cè)系統(tǒng)置于關(guān)鍵位置,監(jiān)控具體生產(chǎn)狀況,并為生產(chǎn)工藝的調(diào)整提供必要的依據(jù)。 在PCB制造過(guò)程中,需檢測(cè)的項(xiàng)目:菲林熱脹冷縮的檢測(cè)、產(chǎn)品外觀檢測(cè)、各元素
2012-08-07 22:14:19
本帖最后由 eehome 于 2013-1-5 10:06 編輯
六軸運(yùn)動(dòng)控制卡是基于PCI總線的高性能六軸伺服/步進(jìn)控制卡,一個(gè)系統(tǒng)中可支持多達(dá)16塊控制卡,可控制96路伺服/步進(jìn)電機(jī),支持
2012-12-24 15:25:13
/32768 =0.061mg。當(dāng)以上圖所示的靜止?fàn)顟B(tài),z軸正方向會(huì)檢測(cè)出1g,X、Y軸為0.如果調(diào)轉(zhuǎn)位置(如手機(jī)屏幕翻轉(zhuǎn)),那總會(huì)有一個(gè)軸會(huì)檢測(cè)出1g,其他軸為0,在實(shí)際的測(cè)值中,可能并不是0,而是有細(xì)微
2016-03-14 10:02:27
一、系統(tǒng)基本功能:溫度檢測(cè)是動(dòng)車(chē)組及其他交通工具中的重要工作。本設(shè)計(jì)通過(guò)PT100溫度傳感器對(duì)溫度進(jìn)行檢測(cè),同時(shí)將檢測(cè)結(jié)果送入單片機(jī)。單片機(jī)可以根據(jù)車(chē)軸的軸溫進(jìn)行故障診斷,并將診斷的結(jié)果顯示在顯示屏
2022-02-28 08:40:48
在尋找射頻電纜或連接器時(shí),你首先需要確定的是電纜。通常有3種類型的電纜,分別為同軸、雙軸和三軸電纜,每種類型都有差異和不同的尺寸。以下教大家怎么認(rèn)清這三種電纜。
2021-01-18 06:28:09
求教大牛關(guān)于CPLD的雙口RAM設(shè)計(jì)程序!
2012-10-22 16:18:14
基于CPLD的系統(tǒng)中I2C總線的設(shè)計(jì)
2012-08-17 11:17:28
分立元件,實(shí)現(xiàn)一個(gè)節(jié)省電池能量的系統(tǒng)斷電電路。在本例中,使用的CPLD是Altera EPM570-T100.使用一只外接P溝道MOSFET Q1和一只國(guó)際整流器公司 的IRLML6302(或等效器件
2018-09-26 17:29:24
自主設(shè)計(jì) 了一種雙核四軸運(yùn)動(dòng)控制器 。該 運(yùn)動(dòng)控制器 以 MCX314As與 STM32為核心 硬件 。該控制 器不僅能夠完成 四軸 的位置 、速度和 s曲線 的加減 速控 制等功能 ,還 能夠
2023-09-19 08:08:55
本文介紹一個(gè)用微控制器在系統(tǒng)配置Lattice MACH4000系列CPLD器件的方案。
2021-04-30 06:43:20
X-Y二維掃描臺(tái)位置檢測(cè)原理是什么?如何去設(shè)計(jì)一種掃描儀位置檢測(cè)系統(tǒng)?如何對(duì)掃描儀位置檢測(cè)系統(tǒng)進(jìn)行仿真測(cè)試?
2021-04-29 06:44:31
本文設(shè)計(jì)的基于CPLD的雙CAN控制器已運(yùn)用于實(shí)際應(yīng)用中,電池管理系統(tǒng)運(yùn)行可靠,CAN報(bào)文收發(fā)平穩(wěn),完全適合混合動(dòng)力汽車(chē)的使用。
2021-05-06 06:51:07
嗨, 我正在通過(guò)App。關(guān)于如何連接CRII CPLD中的LED的說(shuō)明805。該說(shuō)明提到CPLD可以在LED的情況下吸收電流,即。如果連接的引腳處于邏輯0,那么LED將發(fā)光,反之亦然。如果連接的引腳
2019-08-08 06:20:48
MIL-STD-1553B美軍方專為飛機(jī)上設(shè)備制定的信息傳輸總線標(biāo)準(zhǔn)(設(shè)備間傳輸協(xié)議),即數(shù)據(jù)總線系統(tǒng)規(guī)范的規(guī)定,在軍用飛機(jī)控制、導(dǎo)航、通信系統(tǒng)中,數(shù)據(jù)通過(guò)78Ω的屏蔽對(duì)絞線纜進(jìn)行傳輸。屏蔽對(duì)絞電纜的芯線
2017-09-28 10:25:55
,精度較差,無(wú)法滿足高精度的要求。WOVG系列分選機(jī)采用雙遠(yuǎn)心光學(xué)成像系統(tǒng),擁有專利全新智能測(cè)量軟件,精度高,速度快,全程無(wú)人工參與。避免了人為誤差,減低了人力成本。只需把微型軸倒入振動(dòng)盤(pán),從送料,測(cè)量
2017-06-29 15:11:28
本文在硬件電路設(shè)計(jì)上采用DSP 芯片和外圍電路構(gòu)成速度捕獲電路,電機(jī)驅(qū)動(dòng)控制器采用微控制芯片和外圍電路構(gòu)成了電流采樣、過(guò)流保護(hù)、壓力調(diào)節(jié)等電路,利用CPLD實(shí)現(xiàn)無(wú)刷直流電機(jī)的轉(zhuǎn)子位置信號(hào)的邏輯換相
2021-05-12 06:44:08
關(guān)于電機(jī)轉(zhuǎn)子初始位置檢測(cè)的方法電機(jī)轉(zhuǎn)子檢測(cè)的目的對(duì)位置的幾種方法使用d軸電流吸合時(shí)的電角度解算使用q軸電流吸合時(shí)的電角度解算總結(jié)電機(jī)轉(zhuǎn)子檢測(cè)的目的電機(jī)實(shí)現(xiàn)閉環(huán)需要電機(jī)的轉(zhuǎn)速和轉(zhuǎn)子實(shí)際位置的反饋量
2021-09-16 06:48:03
的編碼器絕對(duì)角度,根據(jù)這一信息可以使得電機(jī)位置角與編碼器 的絕對(duì)角度一一對(duì)應(yīng)。 圖三示出了AS5040、磁鐵磁極、電機(jī)轉(zhuǎn)子磁極,以及電機(jī)定子A相軸線四者間的關(guān)系。在電機(jī)控制系統(tǒng)中,常定義轉(zhuǎn)子磁極與定子A
2023-03-09 15:30:26
檢測(cè)電機(jī)運(yùn)行過(guò)程中的轉(zhuǎn)子位置檢測(cè)技術(shù)可分為適用于中高速時(shí)觀測(cè)反電動(dòng)勢(shì)的轉(zhuǎn)子位置觀測(cè)器,和適用于低速或零速時(shí)跟蹤凸極性的高頻信號(hào)注入法。兩種方法各有千秋,值得說(shuō)明的是,觀測(cè)反電動(dòng)勢(shì)的方法在低速或零速
2022-10-12 15:23:20
汽車(chē)設(shè)計(jì)師已成功將毫米波(mmWave)傳感器集成到多個(gè)汽車(chē)駕駛室內(nèi)應(yīng)用中。這些應(yīng)用之一是能夠在各類照明條件和傳感器放置中檢測(cè)車(chē)內(nèi)人員乘坐情況,而不管其是否移動(dòng)。這可幫助汽車(chē)系統(tǒng)檢測(cè)到留在車(chē)內(nèi)無(wú)人看管的兒童或人員位置,以進(jìn)行溫度控制。
2019-07-31 07:47:57
針對(duì)目前研究的艦載機(jī)電磁彈射器的工作特點(diǎn),提出了一種抗電磁干擾能力好、實(shí)時(shí)性好的位置檢測(cè)方案,將目前已經(jīng)比較成熟的脈沖式激光測(cè)距技術(shù)應(yīng)用于艦載機(jī)電磁彈射系統(tǒng)中飛機(jī)動(dòng)態(tài)位置的檢測(cè);介紹了脈沖式激光動(dòng)態(tài)
2010-05-13 09:08:52
高手幫幫忙!用CPLD和模擬電路實(shí)現(xiàn)雙積分A/D轉(zhuǎn)換 怎么做呢精度要4位半 速率0.3秒還可以轉(zhuǎn)換3位半速率提高數(shù)碼管顯示
2011-03-19 15:44:03
應(yīng)用中的位置檢測(cè),或適合空間受限型IDM中的電流檢測(cè)。雙極性輸入器 件適用于高功率應(yīng)用中的電流和電壓反饋。多軸設(shè)計(jì)拓?fù)?b class="flag-6" style="color: red">中適合采用多通 道器件;這類器件具有快速轉(zhuǎn)換時(shí)間和低延遲,因此可提供快速動(dòng)態(tài)響應(yīng)性能
2018-10-25 10:03:48
劍桿織機(jī)電子送經(jīng)系統(tǒng)由三個(gè)部分組成,即位置傳感器、智能伺服控制部件和經(jīng)紗輥。在織布過(guò)程中,位置傳感器檢測(cè)張力桿的偏移位置來(lái)確定經(jīng)紗張力的大小,智能伺服采集位置傳感器的信號(hào)變化值,根據(jù)設(shè)定的張力值,在
2020-05-14 07:58:03
計(jì)算機(jī)聯(lián)網(wǎng)檢測(cè)系統(tǒng)在機(jī)動(dòng)車(chē)檢測(cè)中的應(yīng)用 不要發(fā)廣告網(wǎng)論述,計(jì)算機(jī)聯(lián)網(wǎng)檢測(cè)系統(tǒng)是電子技術(shù)、儀表技術(shù)、計(jì)算機(jī)技術(shù)、網(wǎng)絡(luò)技術(shù)與檢測(cè)設(shè)備的集成,通過(guò)網(wǎng)絡(luò)集成而構(gòu)成的自動(dòng)控制系統(tǒng),按照規(guī)范的通訊協(xié)議在
2012-10-24 13:34:23
另外,在DSP系統(tǒng)中為什么要使用CPLD?有大俠指導(dǎo)嗎?
2019-07-05 03:42:00
如何實(shí)現(xiàn)CPLD的在系統(tǒng)編程?
2021-04-25 07:05:12
請(qǐng)問(wèn)電機(jī)測(cè)試系統(tǒng)如何完美軸對(duì)中?
2021-05-08 07:23:20
Home傳感器,感應(yīng)Spindle在Z軸方向已經(jīng)全程回到上位;固定在X和Y軸橫梁的Road Head讀取頭上,與對(duì)應(yīng)軸的光刪尺一起工作,感應(yīng)檢測(cè)軸所在位置也是一種位置傳感器。 圖 OTHC相機(jī)的兩個(gè)位置
2018-09-04 22:07:54
在泛用機(jī)中,支撐貼片頭的基座固定在X導(dǎo)軌上,基座不進(jìn)行Z方向運(yùn)動(dòng)。貼片機(jī)Z軸控制系統(tǒng)是指貼片頭的吸嘴運(yùn)動(dòng)過(guò)程 中的定位,即取料和貼片過(guò)程中的Z方向定位,以適應(yīng)不同PCB厚度和元件高度,滿足貼片
2018-09-04 16:04:10
現(xiàn)在手頭上一個(gè)項(xiàng)目是通過(guò)一個(gè)算法定位波形圖中一個(gè)游標(biāo)的X軸位置,問(wèn)題是算法可能不準(zhǔn),所以我打算在程序的運(yùn)行的過(guò)程中觀察波形中由算法定位好的游標(biāo),然后通過(guò)鼠標(biāo)拖曳的方法來(lái)修正游標(biāo)的位置。但是我發(fā)現(xiàn)已經(jīng)初始化X軸位置的游標(biāo),無(wú)法再改變它的X軸位置并輸出,請(qǐng)問(wèn)大神,有沒(méi)合適的方法實(shí)現(xiàn)功能。
2015-04-17 23:03:59
、生物醫(yī)學(xué)工程、自動(dòng)檢測(cè)與計(jì)量等領(lǐng)域得到越來(lái)越廣泛的應(yīng)用。本文的鐵路線路沖擊狀況檢測(cè)系統(tǒng)就是基于雙軸加速度傳感器ADXL210進(jìn)行設(shè)計(jì)的。本設(shè)計(jì)利用ADXL210進(jìn)行沖擊測(cè)量,并將測(cè)量到的數(shù)據(jù)送到
2018-11-05 11:00:59
。目前,可用基于霍爾效應(yīng)的霍爾傳感器,來(lái)檢測(cè)洗衣機(jī)滾筒在三個(gè)維度中與機(jī)殼的相對(duì)位置。在洗衣機(jī)中,安裝霍爾傳感器,可測(cè)量偶極磁場(chǎng)的三個(gè)矢量分量。整個(gè)測(cè)量系統(tǒng)包括:1.固定在洗衣機(jī)滾筒上的磁體以及裝在機(jī)殼上
2020-02-28 11:49:55
視覺(jué)組合導(dǎo)航中的應(yīng)用,針對(duì)四軸飛行器的非線性特點(diǎn),傳統(tǒng)的Kalman 濾波方法存在一定的的誤差,而EKF 和UKF 在融合視覺(jué)位置信息時(shí)具有明顯的優(yōu)勢(shì),且UKF 比EKF 更適應(yīng)于四軸飛行器的組合導(dǎo)航系統(tǒng)。
2015-12-31 10:53:54
高速數(shù)據(jù)采集系統(tǒng)的硬件結(jié)構(gòu)MAX7000系列CPLD及其開(kāi)發(fā)平臺(tái)介紹CPLD在高速數(shù)據(jù)采集系統(tǒng)中的應(yīng)用
2021-04-08 06:11:56
位置檢測(cè)裝置 位置檢測(cè)裝置是數(shù)控機(jī)床的重要組成部分。在閉環(huán)、半閉環(huán)控制系統(tǒng)中,它的主要作用是檢測(cè)位移和速度,并發(fā)出反饋信號(hào),構(gòu)成閉環(huán)或半閉環(huán)控制。 &nb
2008-12-30 16:10:09 20
20 CPLD 在汽車(chē)制動(dòng)性能檢測(cè)系統(tǒng)中的應(yīng)用CPLD APPLICATION IN THE DETECTING SYSTEM OF AUTOMOTIVE BRAKING PERFORMANCE
汽車(chē)制動(dòng)性是汽車(chē)主動(dòng)安全的主要性能之一,是汽車(chē)行駛安全的重要保
2009-04-06 01:04:1837 在單片機(jī)系統(tǒng)中使用CPLD,可使系統(tǒng)構(gòu)成靈活,提高可靠性,縮短開(kāi)發(fā)周期。介紹在MCS-51 應(yīng)用系統(tǒng)中的CPLD 應(yīng)用設(shè)計(jì)實(shí)例, 詳細(xì)分析CPLD 的應(yīng)用和實(shí)現(xiàn)方法,提出設(shè)計(jì)中選用和使用CPLD
2009-05-14 13:49:4939 基于CPLD 和DSP 設(shè)計(jì)了線陣CCD 檢測(cè)系統(tǒng),CCD 的時(shí)序驅(qū)動(dòng)由CPLD 實(shí)現(xiàn),經(jīng)過(guò)運(yùn)放后的視頻信號(hào)由TMS320F2812 進(jìn)行采集和處理,此檢測(cè)系統(tǒng)已成功應(yīng)用于醫(yī)藥包裝行業(yè)的數(shù)粒機(jī)系統(tǒng),能夠可
2009-08-13 14:53:4622 文章提出了一種基于ARM+CPLD 結(jié)構(gòu)的可重構(gòu)檢測(cè)系統(tǒng)的設(shè)計(jì)方法, 并采用此方法開(kāi)發(fā)了一款多用途聲波檢測(cè)設(shè)備。該系統(tǒng)充分利用了ARM 芯片資源豐富、運(yùn)行速度快、計(jì)算精度高、編
2009-09-15 15:40:468 CHOTEST中圖儀器PO系列數(shù)控機(jī)床在機(jī)測(cè)量系統(tǒng)也就是機(jī)床測(cè)頭,可以用于精密測(cè)量和檢測(cè)應(yīng)用。比如,在汽車(chē)零部件加工中,可以使用測(cè)頭對(duì)發(fā)動(dòng)機(jī)曲軸箱等關(guān)鍵部位進(jìn)行精密測(cè)量和檢測(cè),以確保其質(zhì)量和可靠性
2023-07-26 13:29:40
在單片機(jī)系統(tǒng)中使用CPLD,可使系統(tǒng)構(gòu)成靈活,提高可靠性,縮短開(kāi)發(fā)周期。介紹在MCS-51應(yīng)用系統(tǒng)中的CPLD應(yīng)用設(shè)計(jì)實(shí)例,詳細(xì)分析CPLD的應(yīng)用和實(shí)現(xiàn)方法,提出設(shè)計(jì)中選用和使用CPLD的
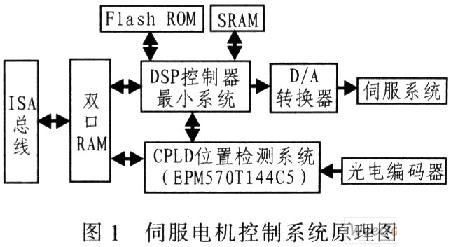
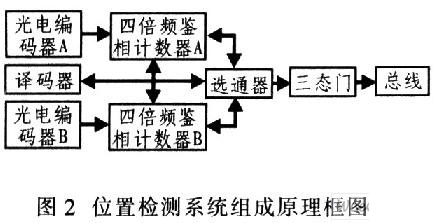
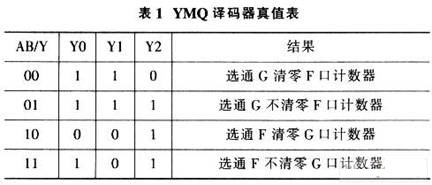
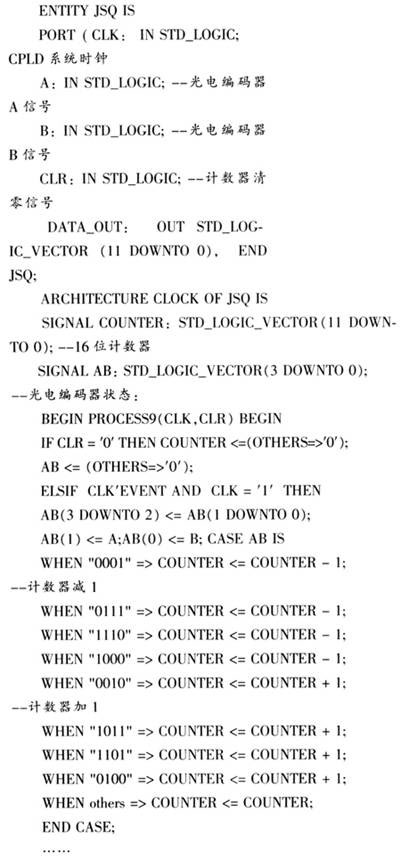
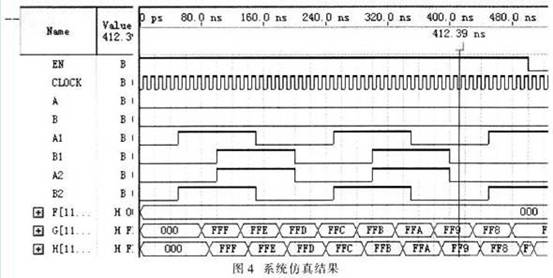
2010-07-14 14:04:2539 簡(jiǎn)介數(shù)控機(jī)床位置檢測(cè)系統(tǒng)工作原理,根據(jù)系統(tǒng)原理框圖編寫(xiě)數(shù)控機(jī)床雙軸位置檢測(cè)系統(tǒng)的地址譯碼、四倍頻鑒相計(jì)數(shù)等VHDL程序,并對(duì)系統(tǒng)的硬件設(shè)計(jì)進(jìn)行仿真,試驗(yàn)結(jié)果表明,系
2010-12-27 10:12:5651 基于柔性測(cè)試技術(shù)的位置傳感器標(biāo)定與檢測(cè)系統(tǒng)平臺(tái)的設(shè)計(jì)
本系統(tǒng)是一套基于柔性測(cè)試技術(shù)理念開(kāi)發(fā)的平臺(tái)式位置傳感器標(biāo)定與檢測(cè)系統(tǒng),能夠完成對(duì)多種位置傳感器
2009-12-12 10:26:06 783
783 CPLD在固態(tài)高功放控制檢測(cè)單元中的應(yīng)用。
2016-01-04 15:26:580 基于CMOS攝像頭與FPGA的位置檢測(cè)系統(tǒng)設(shè)計(jì),感興趣的小伙伴們可以看看。
2016-08-29 15:31:415 電磁發(fā)射用直線感應(yīng)電機(jī)位置檢測(cè)系統(tǒng)_何娜
2017-01-08 12:03:281 基于ARM和CPLD的無(wú)線內(nèi)窺系統(tǒng)設(shè)計(jì)
2017-01-24 16:15:3819 靜態(tài)軌道衡車(chē)輛上衡位置檢測(cè)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)_吳桂清
2017-03-15 08:00:000 摘要: 在有軌機(jī)車(chē)自動(dòng)控制中,需要對(duì)移動(dòng)機(jī)車(chē)位置進(jìn)行精確測(cè)量,為此設(shè)計(jì)了一套感應(yīng)無(wú)線位置檢測(cè)系統(tǒng)。該系統(tǒng)是基于電磁感應(yīng)原理,通過(guò)檢測(cè)天線箱線圈與編碼電纜的感應(yīng)電動(dòng)勢(shì)相位和幅度,得到移動(dòng)機(jī)車(chē)的位置
2018-01-19 20:58:02302 數(shù)控機(jī)床的加T精度主要南位置檢測(cè)系統(tǒng)的精度決定,位置檢測(cè)系統(tǒng)一般包括傳感器(旋轉(zhuǎn)變壓器,光電編碼器,光柵)、四倍頻鑒相電路、計(jì)數(shù)電路等,系統(tǒng)通過(guò)這些檢測(cè)電機(jī)的位移和速度,發(fā)出反饋信號(hào),從而構(gòu)成閉環(huán)或半閉環(huán)控制。
2019-04-23 08:03:002557 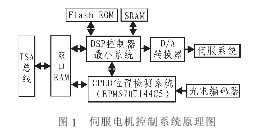
介紹了一種用CPLD(復(fù)雜可編程邏輯器件)作為核心控制電路的測(cè)試系統(tǒng)接口,通過(guò)時(shí)cPLD和竹L電路的比較及cPLD在系統(tǒng)中實(shí)現(xiàn)的強(qiáng)大功能,論述了CPLD在測(cè)試系統(tǒng)接口中應(yīng)用的可行性和優(yōu)越性,簡(jiǎn)單介紹
2019-01-01 16:18:001472 
區(qū)分可以分為單軸、雙軸和三軸。單軸應(yīng)變片:就是只能檢測(cè)一個(gè)方向的應(yīng)變。雙軸應(yīng)變片:是兩個(gè)單軸應(yīng)變片成0度和90度垂直疊加在一起。三軸應(yīng)變片:是三個(gè)單軸應(yīng)變片成0度、
2022-02-18 16:42:20
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論