設(shè)計(jì)工具日漸成熟,如今將FPGA集成到常用的深度學(xué)習(xí)框架已成為可能。未來,FPGA將有效地適應(yīng)深度學(xué)習(xí)的發(fā)展趨勢,從架構(gòu)上確保相關(guān)應(yīng)用和研究能夠自由實(shí)現(xiàn)。
2016-07-28 12:16:38 7349
7349 該原型由英特爾和地平線聯(lián)合開發(fā)完成,基于地平線最新設(shè)計(jì)的一款低功耗深度神經(jīng)網(wǎng)絡(luò)處理器架構(gòu)IP。分工上,英特爾提供了FPGA硬件平臺(tái),地平線提供了實(shí)現(xiàn)在FPGA上的深度神經(jīng)處理器架構(gòu),
2016-12-29 16:03:082424 有多種 3D 傳感器方案來實(shí)現(xiàn)深度感知系統(tǒng),包括立體視覺相機(jī)、激光雷達(dá)和TOF(飛行時(shí)間)相機(jī)。每個(gè)選擇都有其優(yōu)缺點(diǎn),其中,嵌入式深度感知立體系統(tǒng)成本低,堅(jiān)固耐用,適合戶外使用,并且能夠提供高分辨率的彩色點(diǎn)云。
2022-08-23 16:45:151041 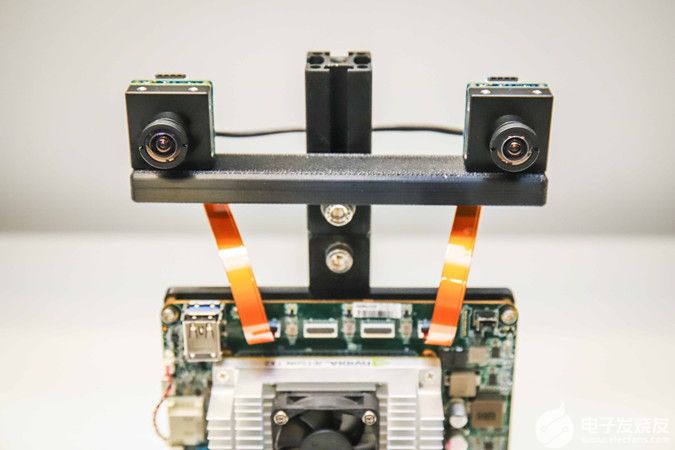
基于單攝像頭圖像來感知3D環(huán)境是一個(gè)病態(tài)問題,但是可以利用一些幾何約束和先驗(yàn)知識來輔助完成這個(gè)任務(wù),也可以采用深度神經(jīng)網(wǎng)絡(luò)端對端的學(xué)習(xí)如何從圖像特征來預(yù)測3D信息。
2023-06-08 10:22:481576 
在自動(dòng)駕駛車輛中,感知系統(tǒng)主要由攝像頭、毫米波雷達(dá)、激光雷達(dá)感器構(gòu)成。攝像頭作為主要的環(huán)境感知傳感器起著非常重要的作用, 可以實(shí)現(xiàn) 360° 全面視覺感知,彌補(bǔ)雷達(dá)在物體識別上的缺陷,是最接近人類視覺的傳感器。因此是車載攝像頭是自動(dòng)駕駛領(lǐng)域的關(guān)鍵設(shè)備之一。
2023-07-04 11:42:102789 
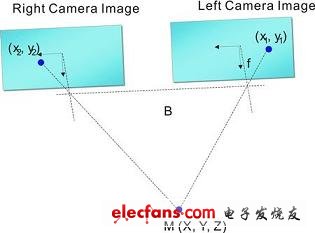
,然后通過三角測量原理計(jì)算圖像像素間的位置偏差(視差)來獲取景物的三維信息。這一過程與人類視覺感知過程是類似的。 雙目立體視覺測量示意圖 在雙目立體視覺系統(tǒng)的硬件結(jié)構(gòu)中,通常采用兩個(gè)攝像機(jī)作為
2020-12-01 15:08:04
現(xiàn)場可編程門陣列 (FPGA) 解決了 GPU 在運(yùn)行深度學(xué)習(xí)模型時(shí)面臨的許多問題
在過去的十年里,人工智能的再一次興起使顯卡行業(yè)受益匪淺。英偉達(dá) (Nvidia) 和 AMD 等公司的股價(jià)也大幅
2024-03-21 15:19:45
大蝦們,小蝦米求助!FPGA的最大深度可以達(dá)到多少,如果我存儲(chǔ)的數(shù)據(jù)由14000*29bit,又需高速處理的話,我是否應(yīng)該考慮使用SDRAM?順便記錄下:當(dāng)讀速率F2慢于寫速率F1時(shí),F(xiàn)IFO便可
2013-05-28 14:17:37
公司名稱:北京感知起源科技有限公司公司介紹:是一家創(chuàng)業(yè)公司,是專注領(lǐng)域?yàn)樾⌒l(wèi)星成像雷達(dá)系統(tǒng)、射頻模塊、星載反射面天線、數(shù)字信號處理硬軟一體化系統(tǒng)、雷達(dá)信號回波模擬器、基于AI的目標(biāo)識別與分類。所涉
2021-11-17 11:56:56
公司名稱:北京感知起源科技有限公司公司介紹:是一家創(chuàng)業(yè)公司,是專注領(lǐng)域?yàn)樾⌒l(wèi)星成像雷達(dá)系統(tǒng)、射頻模塊、星載反射面天線、數(shù)字信號處理硬軟一體化系統(tǒng)、雷達(dá)信號回波模擬器、基于AI的目標(biāo)識別與分類。所涉
2021-11-29 17:36:49
深度學(xué)習(xí)的概念源于人工神經(jīng)網(wǎng)絡(luò)的研究。含多隱層的多層感知器就是一種深度學(xué)習(xí)結(jié)構(gòu)。深度學(xué)習(xí)通過組合低層特征形成更加抽象的高層表示屬性類別或特征,以發(fā)現(xiàn)數(shù)據(jù)的分布式特征表示。晦澀難懂的概念,略微有些難以
2018-07-04 16:07:53
CV:基于深度學(xué)習(xí)實(shí)現(xiàn)目標(biāo)檢測之GUI界面產(chǎn)品設(shè)計(jì)并實(shí)現(xiàn)圖片識別、視頻識別、攝像頭識別
2018-12-21 10:31:47
你好,我有一個(gè)需要立體成像的項(xiàng)目。 realSense d435似乎是完美的,但不幸的是這個(gè)設(shè)備太寬了。是否有可能從深度模塊中撕掉兩個(gè)攝像頭并再次用電纜連接到該板?我知道,我必須再次校準(zhǔn)d435
2018-11-16 11:31:04
相關(guān)部分,考慮簡單修改可以實(shí)現(xiàn)雙攝像頭同時(shí)輸出。但因?yàn)榭紤]到不好驗(yàn)證(有一個(gè)攝像頭異常,執(zhí)行代碼時(shí)會(huì)無法選取)圖片:執(zhí)行期間的錯(cuò)誤打印三、運(yùn)行和網(wǎng)頁代碼在樹莓派上,開啟兩個(gè)terminal,進(jìn)入
2020-09-23 13:50:16
。此外,FPGA正迅速取代ASIC和應(yīng)用專用標(biāo)準(zhǔn)產(chǎn)品(ASSP)來實(shí)現(xiàn)固定功能邏輯。 FPGA市場規(guī)模預(yù)計(jì)在2016年將達(dá)到100億美元。對于深度學(xué)習(xí)而言,FPGA提供了優(yōu)于傳統(tǒng)GPP加速能力的顯著潛力
2018-08-13 09:33:30
1.為什么使用cc2530ZigBee板來實(shí)現(xiàn)感知層?為什么不能直接使用單片機(jī)采集數(shù)據(jù)呢?因?yàn)閱纹瑱C(jī)還連接了WiFi模塊。WiFi模塊會(huì)隨著時(shí)間的推移而發(fā)熱,如果直接用單片機(jī)和節(jié)點(diǎn)相連,則采集到
2022-01-17 08:13:19
FPGA實(shí)現(xiàn)。易于適應(yīng)新的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)深度學(xué)習(xí)是一個(gè)非常活躍的研究領(lǐng)域,每天都在設(shè)計(jì)新的 DNN。其中許多結(jié)合了現(xiàn)有的標(biāo)準(zhǔn)計(jì)算,但有些需要全新的計(jì)算方法。特別是在具有特殊結(jié)構(gòu)的網(wǎng)絡(luò)難以在 GPU 上
2023-02-17 16:56:59
要想機(jī)器人有智能,必先賦予其感知能力。感知計(jì)算,特別是視覺以及深度學(xué)習(xí),通常計(jì)算量比較大,對性能要求高。但是機(jī)器人受電池容量限制,可分配給計(jì)算的能源比較低。
2019-10-10 06:39:48
頭為Micron自帶ISP的200萬像素CMOS攝像頭MT9D111,兩個(gè)攝像頭分別連接到我們的VIP核心板,FPGA實(shí)現(xiàn)兩個(gè)攝像頭的寄存器初始化配置,并且采集640*480的輸入圖像,緩存到DDR2中
2017-05-11 21:26:52
完成,基于地平線最新設(shè)計(jì)的一款低功耗深度神經(jīng)網(wǎng)絡(luò)處理器架構(gòu)IP。分工上,英特爾提供了FPGA硬件平臺(tái),地平線提供了實(shí)現(xiàn)在FPGA上的深度神經(jīng)處理器架構(gòu),深度神經(jīng)網(wǎng)絡(luò)算法,以及整套嵌入式人工智能
2017-01-06 18:09:34
雙目立體視覺(BinocularStereoVision)是機(jī)器視覺的一種重要形式,因其可簡單地利用左右攝像機(jī)中的圖像信息計(jì)算得到相機(jī)視野中物體相對于攝像機(jī)的深度信息使得該技術(shù)擁有廣泛的應(yīng)用前景
2021-12-23 07:19:52
大家好,我想弄清楚哪個(gè)相機(jī)(realsense D415或realsense D435)在陽光下具有最佳性能,可在2到5米范圍內(nèi)進(jìn)行深度感知和物體識別。我已經(jīng)閱讀了規(guī)格,但似乎intel D415
2018-11-20 11:34:48
基于FPGA的小功率立體聲發(fā)射機(jī)的設(shè)計(jì)
2023-09-20 06:12:22
”特征的算法,同時(shí)根據(jù)學(xué)習(xí)到的“經(jīng)驗(yàn)數(shù)據(jù)”,從而能把圖片中的貓都識別出來。基于“深度學(xué)習(xí)”的智能分類 智能機(jī)器人就是通過搭載“深度學(xué)習(xí)”系統(tǒng),實(shí)現(xiàn)對環(huán)境參數(shù)的感知,從而智能判斷自己應(yīng)該執(zhí)行什么程序,包括
2018-05-31 09:36:03
`現(xiàn)實(shí)的世界是一個(gè)擁有寬度、高度和深度的三維立體世界。在平面二維顯示技術(shù)已經(jīng)成熟的今天,三維立體顯示技術(shù)首當(dāng)其沖的成為了當(dāng)今顯示技術(shù)領(lǐng)域的研究熱點(diǎn)。眾所周知人眼在接收被觀察物體的信息時(shí),攜帶物體信息
2020-08-27 14:59:05
被迫寫此論文,卻一點(diǎn)思路都沒有,觀測矩陣怎么求的?又怎么重構(gòu)?最重要的是怎么用FPGA來實(shí)現(xiàn)???求相關(guān)經(jīng)驗(yàn)大神提點(diǎn),思路也可以
2016-11-08 09:19:47
FPGA 上實(shí)現(xiàn)卷積神經(jīng)網(wǎng)絡(luò) (CNN)。CNN 是一類深度神經(jīng)網(wǎng)絡(luò),在處理大規(guī)模圖像識別任務(wù)以及與機(jī)器學(xué)習(xí)類似的其他問題方面已大獲成功。在當(dāng)前案例中,針對在 FPGA 上實(shí)現(xiàn) CNN 做一個(gè)可行性研究
2019-06-19 07:24:41
的FPGA基于立體攝像頭數(shù)據(jù)來計(jì)算用戶的手部動(dòng)作,然后將數(shù)據(jù)發(fā)送到頭盔中的移動(dòng)應(yīng)用處理器,最終通過AR/VR應(yīng)用呈現(xiàn)出來。圖6:展示了開發(fā)工程師如何使用單個(gè)ECP5 FPGA實(shí)現(xiàn)從前需要使用多個(gè)ARM處理器
2020-10-21 11:53:02
數(shù)據(jù)進(jìn)入FPGA的速率高于傳出的速率,持續(xù)的傳輸會(huì)造成數(shù)據(jù)的溢出,斷續(xù)的傳輸可能會(huì)造成數(shù)據(jù)不連續(xù)。使用基于LabVIEW FPGA的DMA FIFO作為主控計(jì)算機(jī)和FPGA之間的緩存,若DMAFIFO深度設(shè)置的合適,F(xiàn)IFO不會(huì)溢出和讀空,那么就能實(shí)現(xiàn)數(shù)據(jù)輸出FPGA是連續(xù)的。
2019-10-12 09:05:54
如何去實(shí)現(xiàn)一種立體圖像獲取及顯示系統(tǒng)的設(shè)計(jì)?
2021-06-03 07:10:25
為什么要設(shè)計(jì)一種基于物聯(lián)網(wǎng)感知的家居人體健康狀況檢測系統(tǒng)?如何去實(shí)現(xiàn)一種基于物聯(lián)網(wǎng)感知的家居人體健康狀況檢測系統(tǒng)設(shè)計(jì)?
2021-10-20 06:23:04
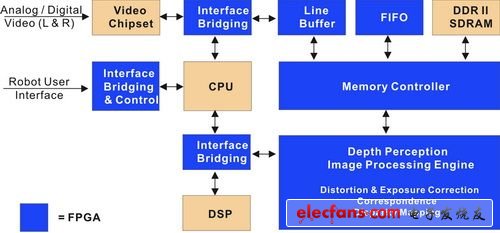
對于自主機(jī)器人導(dǎo)航和其它機(jī)器視覺應(yīng)用來說,實(shí)時(shí)深度感知是很關(guān)鍵的。目前通過立體圖像來計(jì)算深度的算法計(jì)算量很大,例如差異測繪,要占用CPU大量的時(shí)間,或者需要用昂貴的器件進(jìn)行實(shí)時(shí)操作。
2019-10-17 08:28:30
本文介紹一種基于視差原理的立體顯示器的視頻轉(zhuǎn)換系統(tǒng),它能夠?qū)⒁延械?b class="flag-6" style="color: red">立體視頻格式轉(zhuǎn)換成所需的視頻格式。
2021-04-29 06:20:29
進(jìn)入大腦,提供一種全新的體驗(yàn)——使用者通過皮膚即可感受音樂。今年9月,幾位聾啞人參加了在拉斯維加速舉辦的一場音樂會(huì),他們正是利用了Music:Not Impossible可穿戴技術(shù)設(shè)備,通過皮膚體驗(yàn)音樂振動(dòng),感受到“環(huán)繞立體聲”,實(shí)現(xiàn)了親身“聽”到音樂會(huì)的夢想。
2019-07-19 04:20:02
最近要做一個(gè)采集coms攝像頭信號的東西在YUV格式只要Y信號就可以了我只會(huì)fpga了要是不用外加sdram難實(shí)現(xiàn)嗎?求大神指導(dǎo)額
2012-11-03 10:15:00
圖像壓縮之后的數(shù)據(jù)存入fifo,然后經(jīng)過nrf2401發(fā)送。。但是由于圖片尺寸比較大,導(dǎo)致fifo深度不夠,受限于FPGA芯片尺寸的限制,fifo深度不能再選大了。。。求指導(dǎo)
2015-05-22 14:34:48
我想用單片機(jī)或FPGA將普通電腦USB攝像頭的圖像數(shù)據(jù)讀取出來,但不知道如何實(shí)現(xiàn)。麻煩有經(jīng)驗(yàn)的朋友給點(diǎn)提示。如果有相關(guān)資料的話,我真誠的希望能發(fā)給我一份,不勝感激。
2011-06-08 09:09:37
隨著三維立體顯示電影阿凡達(dá)等的出現(xiàn),三維立體顯示得到廣泛的關(guān)注,自由立體顯示系統(tǒng)作為最好實(shí)現(xiàn)真三維立體顯示的技術(shù),對自由立體顯示的研究具有重要的作用,本文通過對自由立體顯示系統(tǒng)中人的因素分析以及自由立體顯示圖像制作分析,為了使人得到很好的三維立體感覺,進(jìn)行了綜合的人機(jī)交互分析。
2020-03-26 06:42:23
fpga采集u***攝像頭怎么樣去實(shí)現(xiàn)
2014-12-16 17:52:29
嗨,我在邏輯中使用單端口RAM模塊,深度為208896,長度為12位。我想通過增加內(nèi)存深度和字長來提高計(jì)算的精度。請讓我知道我的fpga的深度和寬度的兼容值。最大塊RAM存儲(chǔ)器的數(shù)據(jù)表是14,976 Kb。問候,Tanay
2019-10-31 10:21:53
自動(dòng)駕駛汽車的夢想正在成為現(xiàn)實(shí)。通過在車輛中實(shí)現(xiàn)多種先進(jìn)的駕駛員輔助系統(tǒng)(ADAS),汽車行業(yè)對于完全自動(dòng)駕駛的追求正在穩(wěn)步推進(jìn)。如今,幾乎所有汽車經(jīng)銷商的新款車都配備了多個(gè)攝像頭、雷達(dá)和超聲波傳感器,可實(shí)現(xiàn)如輔助自動(dòng)泊車、自動(dòng)緊急制動(dòng)、車道輔助行駛、司機(jī)疲勞駕駛警報(bào)等基于感知的各項(xiàng)功能。
2019-07-29 08:26:19
自動(dòng)駕駛汽車的夢想正在成為現(xiàn)實(shí)。通過在車輛中實(shí)現(xiàn)多個(gè)高級駕駛輔助系統(tǒng)(ADAS),汽車行業(yè)對自動(dòng)駕駛的追求正在穩(wěn)步推進(jìn)。當(dāng)今的新車均已配備多個(gè)攝像頭、雷達(dá)和超聲波傳感器,實(shí)現(xiàn)基于感知的輔助功能,如
2022-11-10 08:09:48
成像對于許多機(jī)器人應(yīng)用至關(guān)重要,能讓機(jī)器人執(zhí)行基本任務(wù),躲避障礙物,進(jìn)行導(dǎo)航以及確保基本安全。 顯然,提供成像的方式是采用低成本視頻攝像頭,或者再好點(diǎn),使用兩個(gè)攝像頭實(shí)現(xiàn)立體視野和深度感知。 但后者
2020-11-27 06:20:37
,又可以作為機(jī)器學(xué)習(xí)、深度學(xué)習(xí)等各類算法的原始數(shù)據(jù),從而為智能駕駛及艙內(nèi)感知保駕護(hù)航。經(jīng)緯恒潤緊跟智能汽車行業(yè)發(fā)展趨勢和市場需求,全面布局車載攝像頭產(chǎn)品,目前已形
2022-07-19 13:20:45
Intel RealSense?深度攝像頭D455Intel Realsense深度攝像頭D455采用立體聲攝像頭,可為各種用途提供出色的深度信息。立體聲攝像頭在室內(nèi)和室外均能正常工作,因此非常適合
2024-02-27 11:51:25
為了解決基于LabVIEWFPGA模塊的DMAFIFO深度設(shè)定不當(dāng)帶來的數(shù)據(jù)不連續(xù)問題,結(jié)合LabVIEWFPGA的編程特點(diǎn)和DMA FIFO的工作原理,提出了一種設(shè)定 FIFO 深度的方法。對FIFO不同深度的實(shí)驗(yàn)表明,采
2011-09-26 13:45:176923 
三目立體視覺外極線校正及其FPGA實(shí)現(xiàn)方法
2016-09-17 07:30:24 16
16 介紹了基于FPGA,利用數(shù)字頻率合成技術(shù)實(shí)現(xiàn)的小功率立體聲 FM調(diào)頻發(fā)射機(jī)的設(shè)計(jì).采用FPGA完成對核心芯片MC145152的控制,可自動(dòng)改變并測量發(fā)射 頻率并用液晶顯示;同時(shí)實(shí)現(xiàn)了頻率擴(kuò)展、自制
2016-10-25 18:04:4211 FPGA是深度學(xué)習(xí)的未來,學(xué)習(xí)資料,感興趣的可以看看。
2016-10-26 15:29:040 機(jī)器深度學(xué)習(xí)是近年來在人工智能領(lǐng)域的重大突破之一,它在語音識別、自然語言處理、計(jì)算機(jī)視覺等領(lǐng)域都取得了不少成功。由于車輛行駛環(huán)境復(fù)雜,當(dāng)前感知技術(shù)在檢測與識別精度方面無法滿足自動(dòng)駕駛發(fā)展需要,深度學(xué)習(xí)被證明在復(fù)雜環(huán)境感知方面有巨大優(yōu)勢。
2016-11-02 17:12:045780 
科達(dá)感知型攝像機(jī)之人員卡口
2016-12-29 20:16:070 科達(dá)感知型攝像機(jī)之特征分析系列宣傳彩頁
2016-12-29 20:33:400 由騰訊云基礎(chǔ)產(chǎn)品中心、騰訊架構(gòu)平臺(tái)部組成的騰訊云FPGA聯(lián)合團(tuán)隊(duì),在這里介紹國內(nèi)首款FPGA云服務(wù)器的工程實(shí)現(xiàn)深度學(xué)習(xí)算法(AlexNet),討論深度學(xué)習(xí)算法FPGA硬件加速平臺(tái)的架構(gòu)
2017-11-15 20:20:082468 針對虛擬現(xiàn)實(shí)領(lǐng)域現(xiàn)有的顯示模塊無法提供滿足人眼視覺規(guī)律的立體視覺效果這一問題,提出一種基于斜交視錐體立體攝像機(jī)模型的虛擬現(xiàn)實(shí)(VR)立體視覺解決方案。首先,通過研究人眼視域模型和人眼雙目提取深度信息
2018-01-03 16:03:441 立體視覺的采集與顯示,定位為立體視覺的采集與顯示系統(tǒng)。另一方面,通過在FPGA片上設(shè)計(jì)的高速圖像處理系統(tǒng),可以根據(jù)左右圖像的差距,計(jì)算出圖像的深度信息,也就是物體在環(huán)境中相對于雙目攝像頭的三維坐標(biāo)。該設(shè)計(jì)方面可以應(yīng)用到人機(jī)交互、機(jī)器視覺領(lǐng)域,作為機(jī)器對環(huán)境情況的認(rèn)知設(shè)備。
2018-05-28 09:51:002852 依托自主研發(fā)的嵌入式主動(dòng)/被動(dòng)雙目立體視覺技術(shù),人加已經(jīng)推出雙目AI攝像頭產(chǎn)品——“司眸”系列,可以為各類機(jī)器人提供立體視覺感知解決方案,讓機(jī)器人擁有人體感知、自主避障等視覺智能,為下游客戶提供成熟、可量產(chǎn)的解決方案。
2018-06-07 14:44:085570 Pico Zense 是 Pico發(fā)布的一款高精度、高分辨度Time-of-Flight(TOF)深度感知解決方案,基于Rockchip RV1108,能實(shí)現(xiàn)手勢識別、人體定位與識別等功能,助力將3D視覺能力快速集成到產(chǎn)品中。
2018-06-22 15:20:175597 計(jì)算機(jī)轉(zhuǎn)變的核心技術(shù)支持,得益于3D傳感器,又稱為深度攝像頭、深度傳感器的采用
2018-07-06 09:12:404332 去年秋季發(fā)布的 iPhone X 擁有兩個(gè)標(biāo)志性的特性,即劉海全面屏、以及 3D 深度感知前置攝像頭,但這也引發(fā)了很大的爭議。
2018-07-25 16:09:163966 微軟在2016年開始將立體攝像頭集成至VR系統(tǒng)中以開發(fā)AR頭顯,允許用戶能夠通過攝像頭的饋送看到現(xiàn)實(shí)世界。通過視頻合成可以創(chuàng)建低成本的AR系統(tǒng)。
2018-11-06 10:42:38641 為滿足物流分揀的低成本和實(shí)時(shí)性要求,提出了基于多個(gè)立體攝像頭的系統(tǒng)獲取典型物體的完整立體信息的方法,并結(jié)合機(jī)械臂搭建了實(shí)驗(yàn)硬件平臺(tái)。實(shí)驗(yàn)采用了2個(gè)微軟Kinect攝像頭在水平面上實(shí)現(xiàn)了約3 mm精度
2019-01-18 15:15:068 本文將概要討論利用模擬或HDMI攝像機(jī)實(shí)現(xiàn)立體視覺(3D視頻)的各種要求。文章將描述一個(gè)基于FPGA的系統(tǒng),它將兩個(gè)視頻流結(jié)合成一個(gè)3D視頻流,通過HDMI 1.4發(fā)射器進(jìn)行傳輸,同時(shí)還要介紹
2019-04-09 08:50:002770 本文從硬件加速的視角考察深度學(xué)習(xí)與FPGA,指出有哪些趨勢和創(chuàng)新使得這些技術(shù)相互匹配,并激發(fā)對FPGA如何幫助深度學(xué)習(xí)領(lǐng)域發(fā)展的探討。
2019-06-28 17:31:466529 個(gè)像素提高到ZYDAS-2的每度14.2個(gè)像素。這進(jìn)而提高了目標(biāo)識別的探測距離,遠(yuǎn)遠(yuǎn)優(yōu)于傳統(tǒng)立體攝像頭相對受限的3D測量距離。
2019-08-09 10:51:465445 實(shí)現(xiàn)PCB高精度深度銑的關(guān)鍵是每軸上裝置的光柵尺可感知板面,使各Z 軸的下降深度被單獨(dú)控制, 各軸間協(xié)調(diào)獨(dú)立作業(yè),實(shí)現(xiàn)量產(chǎn)化加工。
2019-11-15 11:24:341498 提出采用CMOS數(shù)字攝像頭采集并提取黑色膠條位置來控制冷卻轉(zhuǎn)鼓速度的方法。系統(tǒng)以FPGA作為核心控制器,采用兩片SRAM進(jìn)行乒乓操作,FPGA根據(jù)CMOS攝像頭輸出的同步信號,將采集到的圖像信息存儲(chǔ)
2021-02-01 14:54:0010 系下對圖像進(jìn)行重取樣,使圖像的行列對齊。給出了基于FPGA的實(shí)時(shí)計(jì)算三目立體視覺外極線校正的硬件實(shí)現(xiàn)方法。在時(shí)鐘頻率為60 MHz,圖像可分辨的像素?cái)?shù)為640×480時(shí),三目立體視覺外極線校正速度達(dá)到48幀/s。
2021-04-01 10:27:2912 本文給出一種實(shí)時(shí)計(jì)算場景稠密深度圖的多目立體視覺機(jī)設(shè)計(jì)與實(shí)現(xiàn)方法。立體視覺機(jī)使用多個(gè)微型攝像機(jī)同步獲取場景圖像,采用圖像修正、LoG濾波、多立體圖像對匹配和稠密深度圖等并行算法,利用FPGA的大規(guī)模
2021-04-02 09:33:0021 實(shí)現(xiàn)了一種用于自由立體顯示系統(tǒng)的光學(xué)引擎。該系統(tǒng)采用FPGA作為控制處理器,通過RS232串口與DSP瞳孔跟蹤模塊實(shí)時(shí)
2021-04-23 14:54:541392 
,主要探討了三種主流的光學(xué)深度感知技術(shù):雙目立體視覺、ToF(飛行時(shí)間)傳感器,和結(jié)構(gòu)光傳感器。Dinesh Balasubramaniam 的演講主題為:僅有二維是不夠的--光學(xué)深度感知技術(shù)概述
2021-06-23 16:08:401680 當(dāng)今汽車認(rèn)知
自動(dòng)駕駛汽車的夢想正在成為現(xiàn)實(shí)。通過在車輛中實(shí)現(xiàn)多個(gè)高級駕駛輔助系統(tǒng)(ADAS),汽車行業(yè)對自動(dòng)駕駛的追求正在穩(wěn)步推進(jìn)。當(dāng)今的新車均已配備多個(gè)攝像頭、雷達(dá)和超聲波傳感器,實(shí)現(xiàn)基于感知
2022-01-15 17:32:27659 深度信息恢復(fù)是計(jì)算機(jī)視覺領(lǐng)域的一個(gè)重要研究內(nèi)容。使用傳統(tǒng)的光學(xué)成像系統(tǒng)對不同距離的物體成像時(shí),需要機(jī)械移動(dòng)會(huì)造成圖像放大率變化,導(dǎo)致深度測量產(chǎn)生誤差。近年來,電控調(diào)焦的液晶透鏡光學(xué)成像系統(tǒng)已實(shí)現(xiàn)對焦、變焦、深度測量等功能,利用液晶透鏡光學(xué)成像系統(tǒng)進(jìn)行雙目立體視覺深度測量可以擴(kuò)張雙目深度測量范圍。
2022-06-14 13:43:182264 在基于事件的攝像機(jī)的立體深度估計(jì)方面已經(jīng)有了一些工作,但是,由于缺乏準(zhǔn)確的地面實(shí)況深度,評估只限于小的、不相干的序列,包括攝像機(jī)前面的幾個(gè)物體。
2022-11-07 09:39:281990 Dear Reality?發(fā)布新品 EXOVERB,解鎖立體聲制作空間感知新緯度 Dear Reality?推出全新混響插件——EXOVERB,賦予立體聲制作前所未有的 3D 深度和廣度感知技術(shù)
2023-01-31 11:35:21151 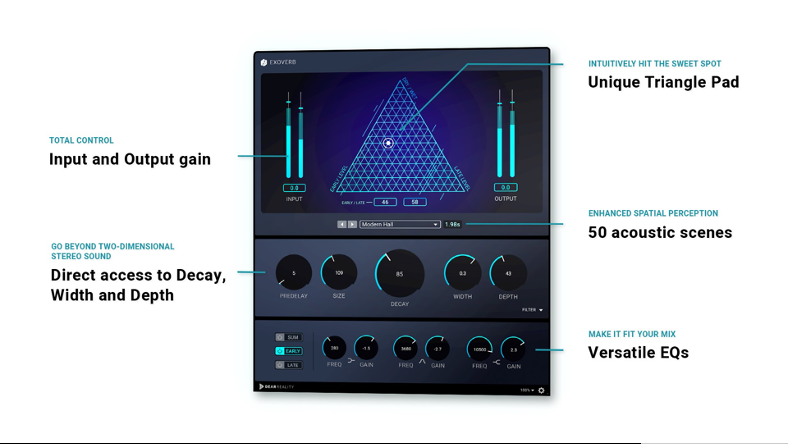
這是新的系列教程,在本教程中,我們將介紹使用 FPGA 實(shí)現(xiàn)深度學(xué)習(xí)的技術(shù),深度學(xué)習(xí)是近年來人工智能領(lǐng)域的熱門話題。
2023-03-03 09:52:131088 在目前主流的3D深度感知方案技術(shù)中,作為賦能衛(wèi)浴場景智能化的絕佳選擇,dToF傳感器可以廣泛應(yīng)用于智能衛(wèi)浴的用戶感知、接近檢測、無接觸操作等,讓用戶充分享受到科技帶來的智能衛(wèi)浴新體驗(yàn)。
2023-04-04 10:51:06582 這是新的系列教程,在本教程中,我們將介紹使用 FPGA 實(shí)現(xiàn)深度學(xué)習(xí)的技術(shù),深度學(xué)習(xí)是近年來人工智能領(lǐng)域的熱門話題。
2023-04-12 10:19:34533 這是新的系列教程,在本教程中,我們將介紹使用 FPGA 實(shí)現(xiàn)深度學(xué)習(xí)的技術(shù),深度學(xué)習(xí)是近年來人工智能領(lǐng)域的熱門話題。
2023-05-04 11:22:36651 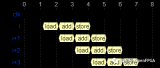
? ? 本文提出了一種生產(chǎn)化的端到端立體深度感知系統(tǒng)設(shè)計(jì),可以完成預(yù)處理、在線立體校正和立體深度估計(jì),并支持糾偏失敗后的單目深度估計(jì)備選方案。同時(shí),該深度感知系統(tǒng)的輸出應(yīng)用于一種基于智能眼鏡拍攝
2023-05-26 16:12:00453 
在自動(dòng)駕駛體系中,毫米波雷達(dá)是系統(tǒng)感知層不可或缺的重要硬件,能讓智能駕駛感知系統(tǒng)立體化。因?yàn)槠囎詣?dòng)駕駛系統(tǒng)的主要邏輯層包括感知層、決策層和執(zhí)行層,而感知層是實(shí)現(xiàn)系統(tǒng)運(yùn)作的源頭基礎(chǔ)。
2023-06-01 16:56:29845 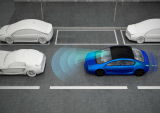
電子發(fā)燒友網(wǎng)站提供《邊緣AI套件上的立體視覺深度感知.zip》資料免費(fèi)下載
2023-06-12 14:36:400 電子發(fā)燒友網(wǎng)站提供《FPGA立體相機(jī)設(shè)置-第一部分.zip》資料免費(fèi)下載
2023-06-29 09:27:060 我的論文方向目前是使用單目攝像頭實(shí)現(xiàn)機(jī)器人對人的跟隨,首先單目攝像頭與kinect等深度攝像頭最大的區(qū)別是無法有效獲取深度信息,那就首先從這方面入手,嘗試通過圖像獲取攝像頭與人的距離。
2023-07-03 10:01:471614 
在本文中,我們首先介紹了立體視覺系統(tǒng)的主要部分,并提供了有關(guān)使用硬件組成和開源軟件制作定制立體相機(jī)的說明。由于此設(shè)置專注于嵌入式系統(tǒng),因此它將實(shí)時(shí)計(jì)算任何場景的深度圖,而無需電腦主機(jī)。
2023-07-13 16:49:17402 
兩個(gè)范疇。 在稠密算法范疇,主要通過點(diǎn)云轉(zhuǎn)換、多視圖立體視覺等方法,來獲取場景中每一個(gè)點(diǎn)的深度信息,從而更準(zhǔn)確地描述場景中的物體。其中最具代表性的就是近兩年非常火熱的BEV感知,其多傳感器數(shù)據(jù)從圖像空間到BEV空間的轉(zhuǎn)換過程
2023-10-17 09:53:20735 在人工智能和圖像處理的迷人世界中,這些概念在使機(jī)器能夠像我們的眼睛一樣感知我們周圍的三維世界中起著關(guān)鍵作用。和我們一起探索立體視覺和深度感知背后的技術(shù),揭示計(jì)算機(jī)如何從二維圖像中獲得深度、距離和空間理解的秘密。
2023-11-21 10:50:45240
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論