 電子發(fā)燒友App
電子發(fā)燒友App


根據(jù)內編隊重力場衛(wèi)星紅外成像工作環(huán)境的溫度要求,選取了非制冷長波紅外焦平面陣列探測器——UL 03 16 2,并在此基礎上進行了系統(tǒng)的軟硬件設計。硬件電路采用了模擬電路和數(shù)字電路分離設計方案,以減小電路噪聲對紅外圖像的影響。在系統(tǒng)實現(xiàn)上,以內嵌MircoBlaze微處理器FPGA為主處理器,通過編程實現(xiàn)了圖像數(shù)據(jù)的獲取、處理和輸出以及整個系統(tǒng)各模塊的綜合管理,提高了系統(tǒng)的集成度和穩(wěn)定性。
采用內編隊衛(wèi)星方式測量大地重力場,需要在內衛(wèi)星所受非保守力引起的擾動加速度小于1×10-11 m2/s的情況下測量內外衛(wèi)星的相對位置[1],利用非接觸可見光測量帶來的光壓擾動在4×10-10 m2/s左右,已超出了非保守力的干擾要求范圍。通過分析得出,利用內衛(wèi)星表面和外衛(wèi)星腔體內表面的紅外發(fā)射率不同,采用三臺固定于外衛(wèi)星腔體內表面的紅外相機對內衛(wèi)星進行拍攝,可解算出內外衛(wèi)星的相對位置。
由于內編隊衛(wèi)星的特殊性,要求該星載紅外相機的體積、質量、功耗都很小。通過調研發(fā)現(xiàn),現(xiàn)有的商業(yè)紅外相機很難達到上述要求,且無法滿足航天要求。而制冷型相機需要冷卻裝置將探測器冷卻到相當?shù)偷臏囟龋@增加了整個系統(tǒng)的功耗和復雜度。因此,研制一種小型星載非制冷紅外相機是實現(xiàn)內編隊衛(wèi)星有效載荷需要首先解決的問題。基于上述需求,本文通過分析內編隊重力場衛(wèi)星的紅外成像環(huán)境,選用了合適的長紅外焦平面陣列探測器,對非制冷紅外相機進行了系統(tǒng)設計,并利用FPGA實現(xiàn)了對焦平面陣列探測器芯片正常工作所需各種信號的控制和圖像預處理算法以及整個系統(tǒng)的綜合管理。
1 非制冷紅外成像系統(tǒng)總體設計
本文設計的非制冷紅外成像系統(tǒng)主要由光學鏡頭、非制冷紅外焦平面陣列、控制電路、圖像處理和輸出電路組成,系統(tǒng)構成框圖如圖1所示。紅外目標光線經過紅外光學鏡頭聚焦在CCD探測器上,模擬電路部分提供CCD工作的基準電壓,CCD探測器在數(shù)字電路部分提供的掃描時序驅動下以模擬電壓的方式逐行輸出每一像素點的灰度值。該模擬電壓信號經過高精度A/D采樣后生成數(shù)字圖像信號送入數(shù)字電路部分。數(shù)字電路部分實時完成各種圖像處理任務,并輸出處理后的圖像數(shù)據(jù)供PC機作后續(xù)處理或在電視機屏幕上顯示。
?

?
考慮到電路噪聲對紅外圖像信號的影響,本系統(tǒng)采用了數(shù)字電路和模擬電路分離設計思想,將數(shù)字電路和模擬電路設計在不同的電路板上,通過排針直接相連。它們之間只有數(shù)字信號的交互,這樣既可以減小數(shù)模混合電路的相互干擾性,也可以降低信號在傳輸線上的噪聲影響。模擬電路部分主要采用各類電壓轉換芯片實現(xiàn)對CCD探測器基準電壓的設置。模數(shù)轉換芯片實現(xiàn)對探測器輸出模擬圖像信號的轉換以及處理后模擬圖像信號的輸出。數(shù)字電路部分以內嵌MicroBlaze 32位微處理器軟核的FPGA為主處理器[2],實現(xiàn)的功能主要包括CCD探測器時序生成、圖像處理算法、處理后的數(shù)字圖像信號輸出以及整個系統(tǒng)的綜合管理等[3]。
2 各模塊的設計與實現(xiàn)
2.1 CCD探測器電路設計與實現(xiàn)
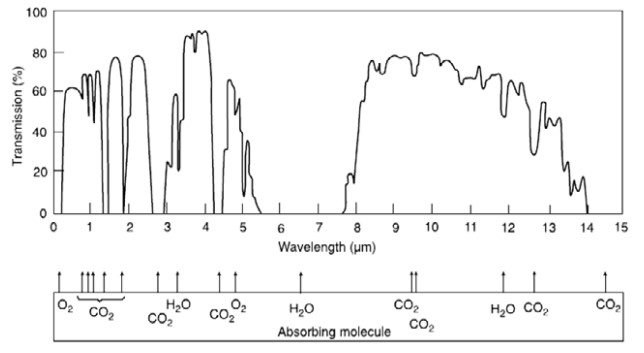
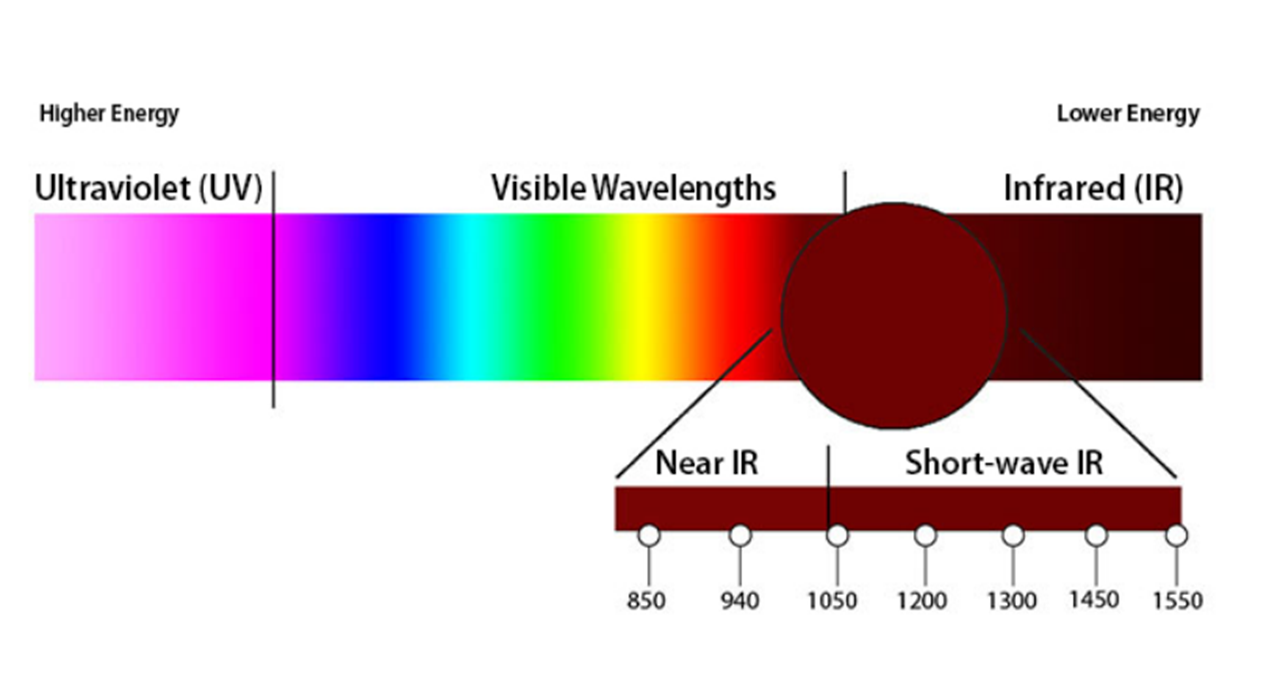
根據(jù)內編隊重力場衛(wèi)星設計的紅外成像環(huán)境溫度(300 K)和黑體維恩位移定律,可得到紅外光譜輻照度的峰值波長為9.66 μm,處于長波紅外波段,因此可以選用典型波長為8 μm~14 μm的紅外焦平面陣列探測器。在波長范圍確定的情況下,綜合考慮航天運用上高可靠性、低功耗、低噪聲和小型化等方面的要求,選取了ULIS公司生產的UL 03 16 2非制冷型長紅外微型測輻射熱儀[4]。與之相匹配的紅外鏡頭委托相關公司設計了視場角120°、焦距3 mm、光圈F數(shù)為1的廣角鏡頭。UL 03 16 2微型測輻射熱儀焦平面陣列包含兩部分:由384×288個單元組成,采用多晶硅工藝制作的電阻型兩維探測陣列;連接到探測器陣列的硅工藝讀出集成電路(ROIC)。
根據(jù)探測器芯片資料,探測器正常工作所需的電源和各項偏置電壓參數(shù)要求如表1所示。

?
由表1可知,VDDA和VDDL為供電電源,選用了轉換效率高、穩(wěn)定性好的LT1086-5.0和LT1086-3.3電源芯片,它可提供1.5 A的最大電流。4個精密基準電壓源需要為探測器提供低噪聲的偏置電壓(VBUS、GFID、VSK和GSK),比較此類芯片的特性,采用AD584配合精密可調電阻產生VBUS、GFID和VSK三種電壓,采用LM4041配合精密可調電阻產生GSK電壓。為了使電源噪聲達到上述要求,設計了放大器去噪電路,采用低噪聲精密放大器OP270,它在1 kHz下能達到5 nV的電壓穩(wěn)定精度,溫度漂移為1 ?滋V/K。圖2以VSK(5.475 V)電壓為例給出了具體電路原理圖,其他電壓的電路原理基本類似。
?

?
探測器借助不同的外部時鐘和偏置電壓,內部時序器為完全同步的ROIC操作提供所有必要的內部信號,所有內部脈沖都是通過主時鐘的整數(shù)倍頻得到的。內部時序器的操作僅需要以下時鐘[4]:(1)主時鐘(MC);(2)復位信號;(3)積分信號。VIDEO信號在每行積分完成的18.5個時鐘周期后開始輸出,與之相應的AD采樣時鐘可設置為積分完成后的19個周期開始,與主時鐘同步。上述信號的時序關系可在FPGA內部編程實現(xiàn)。
2.2 模擬采樣電路設計
為了保證圖像的高質量,需要確保高精度、低噪聲的A/D轉換。CCD探測器為串行輸出,最高主頻為6 MHz,圖像采集的數(shù)據(jù)量較大。輸出的Video信號在1 V~4.2 V內動態(tài)變化,它對應了-10 ℃~80 ℃的溫度范圍,由于系統(tǒng)環(huán)境溫度是27 ℃,Video信號的輸出范圍很小,給電路的設計帶來了較大的困難。為了盡可能提高輸出速度和采樣精度,選用了14位高速高精度集成轉換芯片AD9240[5],其電路連接圖如圖3(a)所示。
?

?

?
本系統(tǒng)設計中考慮到圖像目標比較均勻單一,采用了計算量偏小的A3×3中值濾波窗口。
上述圖像處理模塊的實現(xiàn)都由FPGA實現(xiàn),對于非均勻性校正,預先將高低溫下的探測器像元響應存入外部SRAM中,直接調用FPGA中的乘法和加法模塊通過上述公式計算各像元系數(shù)并存儲到Flash中,在實時校正過程中由MircoBlaze將系數(shù)調入到外部SRAM中供校正模塊使用[5]。對于線性灰度變化,可先求取圖像的最大和最小灰度值,然后將校正后的像素值代入式(6)即可求得。對于3×3中值濾波,可將圖像數(shù)據(jù)延遲得到3行并行數(shù)據(jù)[7](不延遲行數(shù)據(jù)、延遲1行數(shù)據(jù)和延遲2行數(shù)據(jù)),利用這3行并行數(shù)據(jù)完成3×3窗口內延遲1行數(shù)據(jù)的中值濾波計算。
2.4 圖像輸出模塊設計與實現(xiàn)
經過預處理后的圖像通過兩種方式輸出:(1)通過LVDS接口信號方式輸出,供后續(xù)處理;(2)實時顯示在電視屏幕上。
LVDS信號采用低壓差分信號傳輸方式,可實現(xiàn)信號的高速低噪聲傳輸[8]。電路設計較為簡單,只要在數(shù)據(jù)的收發(fā)兩端設計LVDS信號轉換芯片即可,本系統(tǒng)發(fā)送端采用了信號發(fā)送轉換芯片DS90CR215,接收端采用了與之相對應的信號接收轉換芯片DS90CR216。
將紅外探測器采集到的圖像實時顯示在電視屏幕上,需要將預處理后的數(shù)字圖像信號轉換為PAL制式的模擬電視信號。系統(tǒng)采用AD公司的DAV7123視頻轉換芯片,視頻碼流在芯片內部進行D/A轉換,再進行視頻編碼,然后生成復合同步信號、消隱信號和模擬視頻信號,這三路信號共用一路信號輸出[9]。由于PAL625行制的電視信號采用13.5 MHz的抽樣標準,而探測器輸出5 MHz,因此在輸出端采用了雙口RAM對圖像數(shù)據(jù)進行了緩存,再根據(jù)現(xiàn)有PAL制式電視標準[10]對雙口RAM中的像素灰度值進行讀取。
3 系統(tǒng)測試結果與分析
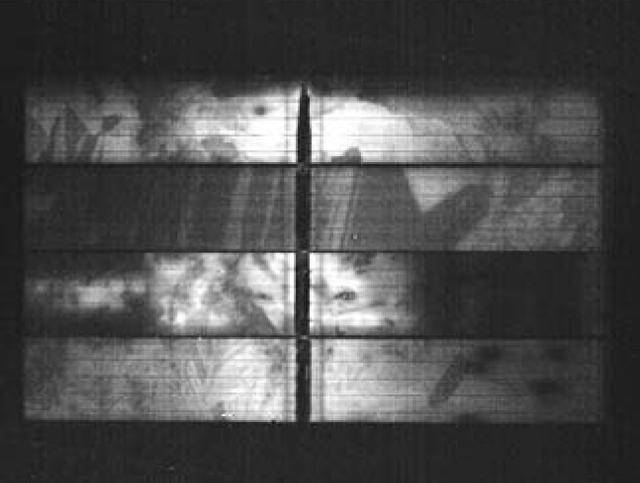
通過上述硬件電路的設計和圖像預處理算法的實現(xiàn),得到不同預處理階段的圖像和PC機上實現(xiàn)的邊緣提取結果如圖4所示。
?

?
通過圖4圖像可以得出,兩點校正后的圖像成像效果較好,伴有隨機散粒噪聲干擾,經過中值濾波后,基本上消除了噪聲的影響。預處理后的圖像邊緣輪廓清晰,通過邊緣提取結果分析得知,圖像質量基本上能保證內外衛(wèi)星相對位置解算的精度。
本項目設計的最終目的是要通過外衛(wèi)星腔體內表面的三臺紅外相機對內衛(wèi)星進行照相,最后通過雙目或三目交匯解算出內外衛(wèi)星的相對位置。本文的內容屬于前期紅外相機原理樣機的研制,包括紅外CCD探測器的選取,硬件電路的設計與軟件系統(tǒng)的實現(xiàn),但其功能只限于紅外圖像信號的獲取和圖像預處理,F(xiàn)PGA實現(xiàn)的算法沒有涉及到后續(xù)的圖像處理,包括圖像的邊緣提取、中心擬合以及三目交匯的解算。通過對預處理后的圖像邊緣提取結果分析可知,該原理樣機的圖像輸出質量良好,基本達到系統(tǒng)要求,攻克了內編隊重力場衛(wèi)星有效載荷測量的關鍵技術,為后續(xù)試驗樣機和工程樣機的研制奠定了堅實的基礎。
參考文獻
[1] 張育林,曾國強,王兆魁,等.分布式衛(wèi)星系統(tǒng)理論及應用[M].北京:科學出版社,2008.
[2] Xilinx Company.Spartan-3 FPGA family complete data sheet[S].2004,8.
[3] Hanson.Advances in monolithic ferroe1ectric uncooled IR FPA technology[C].SPIE,1995,3379:60-68.
[4] ULIS Company.UL 03 16 2 datasheet revision1[S]. 2006,12.
[5] Analog Devices,Inc.High speed AD 9240 datasheet,Rev.A,1998.
[6] 周建勇,尹玉梅,唐遵烈,等.基于FPGA的紅外圖像非均勻性校正技術[J].半導體光電,2007,28(2).
[7] SEINSTRA F J,KOELMA D.A fully sequential programming model for efficient data parallel image processing. Concurrency and Computation:Practice and Experience,2004,16(6):611-614.
[8] 張健,吳曉冰.LVDS技術原理和設計簡介[J].電子技術應用,2000(5).
[9] 鄧春健,王琦,徐秀知,等.基于FPGA和ADV7123的VGA顯示接口的設計和應用[J].電子器件,2006,29(4).
[10] PAL-D制電視廣播技術規(guī)范[S].中華人民共和國國家標準,GB 3174-1995.
[11] 徐欣,于紅旗.基于FPGA的嵌入式系統(tǒng)設計[M].北京:機械工業(yè)出版社,2005.















 工商網監(jiān)
工商網監(jiān)
評論