 電子發燒友App
電子發燒友App


1引言
用計算機或微控制器通過一種或多種總線方式,實現與現場各種設備的通信,并通過總線實現對現場設備進行必要控制的計算機網絡系統稱為底層測控通信網絡系統,簡稱底層測控網絡。本文是針對數控系統方面來展開研究的,提出了一種基于CAN總線的數控系統底層測控網絡,現場設備就是數控機床等數控設備。
2CAN總線的基本工作原理
CAN總線的拓撲結構是一個典型的串行總線的結構形式。CAN總線中一個節點發送信息,多個節點接收信息;但CAN總線的信息存取方式采用的是一種廣播式的存取工作方式。在CAN總線的通信協議中支持的是基于報文的工作方式。也就是說加入或撤銷節點設備都不會影響網絡的工作,十分適用于控制系統要求快速、可靠、簡明的特點。CAN總線的數據通信具有突出的可靠性、實時性和靈活性。CAN采用了CRC校驗并可提供相應的錯誤處理功能,保證了數據通信的可靠性。為了清楚地說明數控系統遠程測控儀的工作原理,我們以結構方框圖的形式表示如圖1所示。輸入信號來自于數控機床電機編碼器的光電編碼器,輸出信號可以去伺服驅動或控制其它需要的信號,下面是它的工作原理:
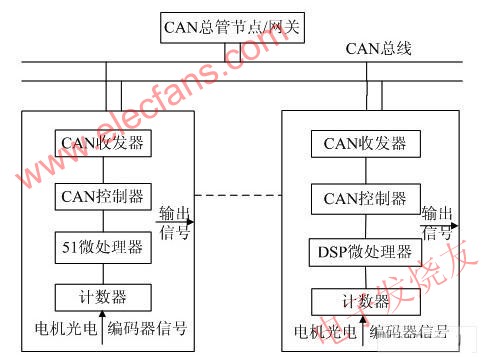
圖1基于CAN總線的數控系統遠程測控儀的工作原理圖
由伺服電機編碼器的脈沖輸出信號進入測控儀的輸入端,后經計數器濾波、倍頻、鑒相、計數等;微處理器對采來的數據進行一定較簡單處理,再轉發到CAN控制器的緩存器里面;時機成熟CAN控制器再進一步發給CAN收發器(驅動),最后CAN收發器把數據轉發給CAN總線、總管CAN節點的收發器、CAN控制器;總管CAN節點充當網關的作用,把底層CAN節點的數據取出來以便自己或其它對其進行進一步的復雜分析處理,相反上面來的數據依照同樣的道理可以通過CAN網關下傳到底層的CAN節點。就這樣底層和中間層進行了數據信息的交流。底層的CAN節點也可以接受CAN總管節點發來的信息,通過輸出信號通道把命令傳給相應的接口電路、伺服系統,以便對數控設備進行控制。
3基于DSP的CAN測控儀的設計與開發
本文選用的微處理器是由TI公司生產的TMS320LF2407。基于DSP的CAN測控儀的系統原理框圖如圖2所示:
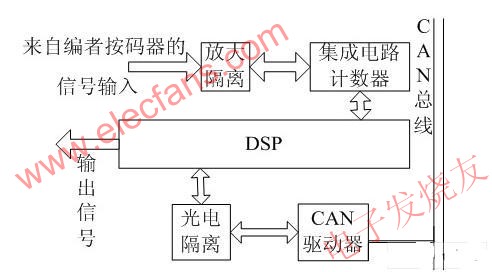
圖2基于DSP的CAN測控儀的系統原理框圖
DSP用的CPU用TI公司的2000系列的TMs320LF2407實現,光電隔離用6N137實現,CAN驅動器用PCA820C250實現。因為TMS320LF2407自帶有CAN控制器,所以這里就不用加控制器。
3.1測控模塊硬件設計
智能結點包括信號采集、信號處理及信號傳輸三大部分,根據所選用的微處理芯片所帶的外圍接口的不同,整個智能結點的結構有所不同。本系統所選用的TMS320LF2407帶有豐富的外圍接口,所以整個智能結點結構簡潔,系統的可靠性極強。以TMS320LF2407為核心的智能結點電路包括以下部分:電源電路、時鐘復位電路、CAN總線接口電路、信號調理部分及外擴存儲電路,其結構框圖如圖3:
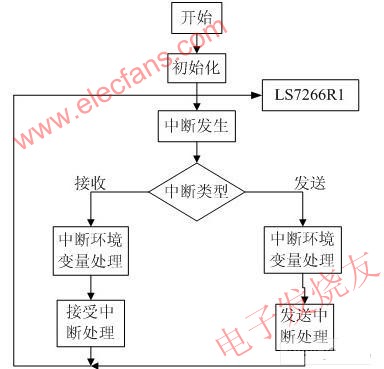
圖3智能結點總體結構圖
由于TMS320LF2407內嵌CAN模塊,所以通過一個CAN驅動器就可以與CAN總線相連。為了增強CAN總線結點的抗干擾能力,CANTX與CANRX并不直接與CAN驅動器82C250的TXD和RXD相連,而是通過高速光耦6N137進行電氣隔離后,再與82C250相接。這樣就很好的實現了總線上各CAN節點間的電氣隔離,避免了相互之間的電氣干擾。本系統中6N137所采用的電源3.3v、5V及5V-CAN是相互隔離的,保證了光耦器件的電氣隔離功能。82C250與CAN總線的接口部分也采用了一定的安全和抗干擾措施。82C250的CANH和CANL引腳各自通過一個5歐的電阻與CAN總線相接,電阻起到限制電流的作用,保護82C250免受過流的沖擊。CANH與CANL與地之間并聯了兩個30pF的小電容,可以起濾除總線上的高頻干擾,并具有一定的防電磁輻射的能力。另外在兩根CAN總線輸入端與地之間分別接了一個防雷擊管,當輸入端與地之間出現瞬變干擾時,通過防雷擊管的放電可以起到一定的保護作用。
3.2時鐘和復位電路設計
3.2.1時鐘電路設計
本文采用6M的晶體振蕩器,晶振的輸出直接連接到X2引腳,并將DSP的X1引腳懸空。在設計程序時,設置DSP內部的時鐘鎖相環為4倍頻,則CPU的工作時鐘就可達到24M。
3.2.2復位電路設計
在設計中,使用了上電復位和按鍵復位相結合的簡單電路.在上電的瞬時,電容相當于短路,在上電的瞬時,電容C16相當于短路,此時RST為低電平,對芯片進行復位處理。經這一段時間后,電容的電壓達到2V,則復位過程結束,芯片進入正常工作區。當按下K1時,RST直接與地相連接,芯片進行復位處理。因此操作者可以根據自己的需要隨時對系統進行復位操作。
3.3電源電路設計
TM3S20LF2407A的工作電壓是.33v,而設計中用到的晶體振蕩器、光耦隔離器件6N137、CAN驅動器均為SV供電,因此以TMS320LF2407A為核心所構成的應用系統是一個混合電壓系統,需要對電壓進行轉換.系統中采用TI公司的甘57333Q電壓轉換芯片為DSP轉換.33V電壓。
3.4外擴存儲電路設計
TMs320LF2407片內帶有4K程序/數據RAM,32KFLASH程序存儲器,芯片自帶的數據和程序存儲器己經滿足了本監控系統的要求,所以在實際應用中硬件設計時不用擴展數據和程序存儲器。但是作為初期的電路設計,為了方便在線調試,設計了一片64K靜態隨機讀寫存儲器,在線調試時供程序、數據共同使用。
3.5信號調理電路設計
從傳感器傳來的信號均為電壓或電流信號,在本智能結點上,設計了放大電路及濾波電路,對初始信號進行放大處理和濾波處理。為了保證測量的精度,對于精度要求較高的信號采用儀用放大器AD6523來進行放大。而對于精度要求不高的信號,則采用價格低廉的LM324來進行放大處理。
AD623可工作于單電源方式下,此時AD623的供電電壓范圍為3V-12V;DS623也可以工作在雙電源方式下,此時的電壓范圍為±5V到±6V。在本智能結點中,電源電路只提供3.3V和5V的電壓,且DSP的工作電壓為3.3V,所以采用單電源方式。為了去藕,在靠電源腳處加了10μf的電容。
4測控儀的軟件設計
智能結點的軟件包括系統的初始化模塊、數據采集模塊、數據處理模塊和系統的傳輸模塊。初始化模塊完成以下工作:根據芯片本身的功能和特征,所用的寄存器清零,程序FLASH區和數據RAM區初始化,中斷口設置等為主程序運行準備工作;還要檢查和保護系統電源,利用本身自帶的看門狗(WATCHDOG)監視DSP芯片的各資源的硬件運行情況。在DSP芯片能正常運行后,進入數據采集軟件的主程序運行。使用默認配置參數分配數據采集卡系統的通道資源、存儲器資源和總線占用資源.數據采集模塊以EMA中斷(事件管理中斷)中的定時器軟中斷啟動LS7266R1采集一幀數據;與其同時,數據處理模塊對已采集完前一幀各通道數據做處理。數據的傳輸是通過CAN總線來完成的,所以數據傳輸模塊必須完成CAN總線通信功能。在下面的兩節里,將根據TMS320LF2407的特點詳細介紹數據采集、處理和傳輸模塊的設計。
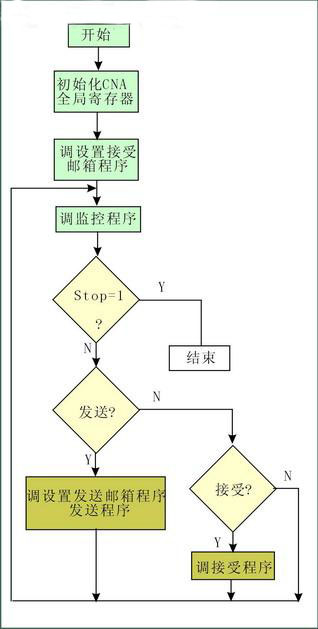
CAN通信軟件的功能主要有兩個:把智能結點的數據包裝成有效的CAN信息幀發給目標結點;從CAN總線上接收有效的數據幀,并將信息幀還原為原始數據,供給CPU進行下一步的操作。數據幀的包裝和還原都是由DSP內的CAN控制器來完成的,在通信軟件中,只需設置CAN控制器中的相應寄存器就可以了。TMS320LF2407的CAN控制器是一個完全的CAN控制器。整個軟件流程如圖4:
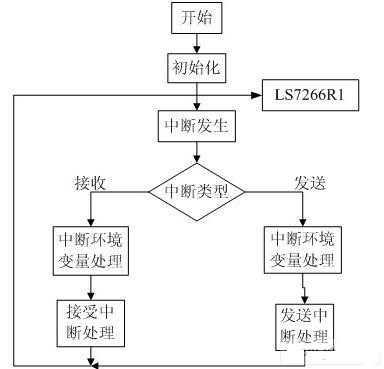
圖4軟件流程圖
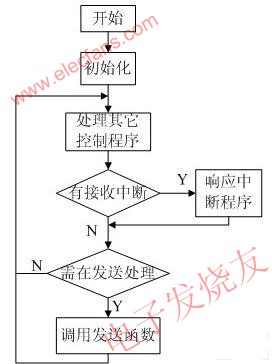
圖5CAN總線通信流程圖
有了CAN控制器的支持,CAN通信軟件的設計就變得簡潔明了。本系統CAN通信軟件設計思想是:將本系統向其它節點發送數據設計成函數,當本系統發送數據時調用此函數,將數據發送到CAN總線上;本系統接收數據采用中斷方式,當CAN控制器接收到數據后,向微控制器發出中斷響應信號,微控制器在中斷程序中將接收到的數據讀入。整個系統對CAN總線通信軟件管理的流程圖如圖5所示。
本文作者創新點:
本文設計的基于CAN總線的數控系統底層測控模塊,對數控機床的運動精度進行測試。實現了與現場各種設備的通信,并通過總線實現對現場設備進行必要控制,使本地各設備的信息交互更加迅速。









 工商網監
工商網監
評論