 電子發燒友App
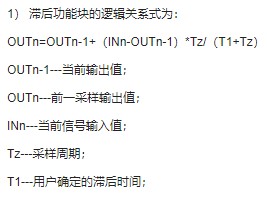
電子發燒友App


引言
現場總線是當今自動化領域技術發展的一個熱點,被譽為自動化領域的計算機局域網。它的出現,標志著工業控制技術領域又一個新時代的開始,并對該領域的發展產生了重要的影響。控制器局域網CAN(Controller Aera Network)屬于現場總線的范疇,CAN總線的數據通信具有極高的可靠性、實時性和靈活性的特點,是一種有效支持集散控制系統和實時控制的多主串行總線。
1. 基于CAN總線的集散控制系統
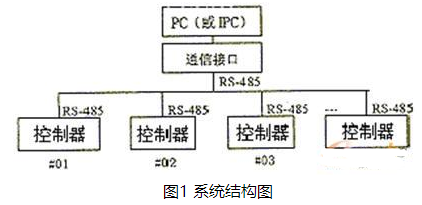
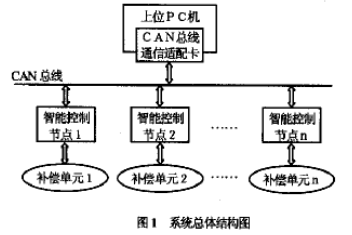
圖1 基于CAN總線的集散控制系統
基于CAN總線的集散控制系統如圖1所示,采用現場總線式控制系統FCS(Fieldbus Control System)結構,由上位機、CAN總線控制網絡、CAN智能節點組成。上位機主要完成在線系統監控,上位機通過CAN適配卡與CAN總線相連;CAN智能節點完成數據采集及計算、節點設定、節點控制、運行顯示等。上位機和智能節點之間通過CAN現場總線交換各種數據和管理控制信息。
2. CAN的性能特點
CAN為多主方式工作,網絡上任一節點均可在任意時刻主動地向網絡上其他節點發送信息,而不分主從,通訊方式靈活,且無需站地址等節點信息。
CAN網絡上的節點信息分成不同的優先級,可滿足不同的實時要求,高優先級的數據最多可在134μs內得到傳輸。
CAN采用非破壞性總線仲裁技術,當多個節點同時向總線發送信息時,優先級較低的節點會主動的退出發送,而優先級較高的節點可不受影響地繼續傳輸數據,從而大大節省了總線沖突仲裁時間。
CAN只需要通過報文濾波即可實現點對點、一點對多點及全局廣播等幾種方式傳送接收數據,無需專門的“調度”。
CAN的直接通信距離最遠可達10km(速率5kbps以下);通信速率最高可達1Mbps(此時通信距離最長為40m)。
CAN上的節點數主要取決于總線驅動電路,目前可達110個,報文標識符可達2032種(CAN2.0A),而擴展標準(CAN2.0B)的報文標識符幾乎不受限制。
CAN采用短幀結構,傳輸時間短,受干擾概率低,具有極好的檢錯效果。
CAN的每幀信息都有CRC校驗及其他檢錯措施,保證了數據出錯率極低。
CAN通信介質可為雙絞線、同軸電纜或光纖,選擇靈活。
CAN節點在錯誤嚴重的情況下具有自動關閉輸出功能,以使總線上其他節點的操作不受影響。
3. CAN智能節點硬件設計
目前常用的CAN器件分為兩大類,一類是獨立的CAN控制器,如Philips的PCA82C250、SJA1000等,另一類是帶有CAN功能的微控制器,如PIC的DSPIC6014、TI的TMS320F2812、Motorola的MC9S12DT128等等。本文采用Intel的 87C196KD微處理器和PHILIP的 SJA1000 CAN控制器完成CAN總線智能節點的設計。
圖2 CAN智能節點硬件電路
CAN智能節點硬件電路如圖2所示。電路主要由五部分組成:微控制器87C196KD、獨立CAN控制器SJA1000、CAN總線收發器82C250、高速光電耦合器6N137、復位電路。
微控制器87C196KD是CAN智能節點的核心部分,87C196KD具有32K字節的ROM和1000字節的RAM,可用高級語言編程。87C196KD主要完成節點數據采集及計算、節點設定、節點控制、運行顯示等功能,并與CAN控制器SJA1000之間發送、接收數據。
SJA1000芯片是一種應用廣泛、性能優異的CAN總線控制器。SJA1000負責完成CAN總線通信協議的物理層和數據鏈路層的功能。它有Basicmode和Pelimode兩種工作模式,與 Basicmode模式相比,Pelimode工作模式支持擴展幀,報文標識符可達29位,提供了更加強大的功能。為減少每幀非數據字符的數量,提高信息交換速度,在實際應用中宜采用Basicmode模式。在Basicmode模式下,SJA1000對于微處理器來說相當于一個存儲器映像外圍設備,它的可尋址域由控制段和接收、發送緩沖器組成。SJA1000的AD0~AD7連接到87C196KD的P3口(數據總線),采用并口連接方式,數據讀寫速度快。87C196KD 地址總線的P4.6、P4.7通過譯碼器與SJA1000的片選信號CS相連,SJA1000的RD、WR、ALE分別與87C196KD的RD、WR、ALE相連, SJA1000的INT經過非門與87C196KD的EXINT相連, 微控制器也可以通過中斷的方式訪問CAN控制器。
82C250是CAN控制器與物理總線之間的接口。82C250的CANL和CANH與CAN總線相連,若82C250處于CAN總線的網絡終端,CANL和CANH之間需加一個匹配電阻,用于消除反射信號的干擾。RS用于選擇三種不同的工作方式:高速、斜率控制和待機,RS串接一個電阻后再接地,用于控制上升和下降斜率,減小射頻干擾。
為了進一步提高系統抗干擾能力,在CAN控制器SJA1000和CAN總線收發器82C250之間加接高速光電耦合器6N137,并采用DC-DC變換器隔離電源,這樣就很好的實現了總線上各個CAN節點之間的 器隔離。
復位電路由看門狗MAX706和手動復位按扭組成。當系統發生故障時,MAX706自動產生復位信號給87C196KD和SJA1000復位,若想重新啟動程序,可用手動復位按扭復位。
4. CAN智能節點軟件設計
CAN智能節點的軟件設計主要包括三部分:CAN初始化程序、報文發送程序、報文接收程序。下面給出了Basic CAN模式CAN智能節點軟件的程序框圖和C語言源程序。
a.CAN初始化部分
#include 《80c196kd.h》
/* 應包含的微控制器寄存器的定義*/
#include _SFR_H_
#include _FUNCS_H_
#define BASE_CAN 0Xa000 /*定義CAN控制器基址*/
typedef struct {
unsigned int id; /*報文標識符*/
unsigned char rtr; /*遠程幀位*/
unsigned char dlen; /*數據長度*/
unsigned char data[8]; /*數據*/
} MSG_STRUCT; /*將CAN協議的幀用C語言的結構表示*/
void init_can()
{
*(unsigned char*)(BASE_CAN + 0) = 0x01; /*SJA1000進入復位狀態*/
*(unsigned char*)(BASE_CAN + 4) = 0x00; /* 初始化接收代碼寄存器ACR */
*(unsigned char*)(BASE_CAN + 5) = 0xff; /* 初始化接收屏蔽寄存器AMR */
*(unsigned char*)(BASE_CAN + 6) = 0x00; /* 初始化總線時序寄存器BTR0 */
*(unsigned char*)(BASE_CAN + 7) = 0x14; /* 初始化總線時序寄存器BTR1 */
*(unsigned char*)(BASE_CAN + 8) = 0xfa; /* 初始化輸出控制寄存器OCR */
}
[!--empirenews.page--] b.報文發送部分
unsigned char can_send(MSG_STRUCT smsg)
{
unsigned char v;
int i;
v=*(unsigned char*)(BASE_CAN + 2);
if( v &0x08) /*判斷是否可以發送數據*/
{ v=smsg.id》》3; /*標識符送識別碼寄存器*/
*(unsigned char*)(BASE_CAN + 10) = v;
v=*(unsigned char*)(BASE_CAN + 10);
v=smsg.id & 7; /*識別碼0-2位、RTR、DLC*/
v《《=5;
v+=smsg.dlen;
*(unsigned char*)(BASE_CAN + 11) = v;
for(i=0;i
{ *(unsigned char*)(BASE_CAN + 12+i) = smsg.data[i]; }
*(unsigned char*)(BASE_CAN + 1) = 0x01;
return(1);
}
else
{ return(0);}
}
c.報文接收部分
unsigned char can_receive()
{
MSG_STRUCT rmsg;
int i;
unsigned char buf1,buf2;
while((*(unsigned char*)(BASE_CAN + 2)) & 0x01)/*判斷是否有可接收信息*/
{buf1 = *(unsigned char*)(BASE_CAN + 20); /*將一幀信息取出*/
buf2 = *(unsigned char*)(BASE_CAN + 21);
rmsg.dlen = buf2 & 0x0f; /*數據長度*/
for(i=0; i《 rmsg.dlen; i++) /*取出數據*/
{rmsg.data[i]=*(unsigned char*)(BASE_CAN + 22 + i); }
*(unsigned char*)(BASE_CAN + 1) = 0x04; /*釋放接收緩沖器*/
rmsg.rtr = (buf2 》》 4) & 0x01; /*遠程幀*/
rmsg.id = buf1; /*取出報文標識符*/
rmsg.id 《《= 3;
rmsg.id |= (buf2 》》 5) & 0x06;
switch (rmsg.id) /*按標識符轉入不同的數據處理程序*/
case ……
{……
……}
break;
case ……
}
}
5. 結束語
本文的創新點在于:將現場總線引入到集散控制系統中,克服了傳統的串行通訊集散控制系統的實時性不強,通訊可靠性差的問題。所給出的CAN智能節點已應用于某發電廠的集散控制系統中,經過一年多的運行情況發現該設計方案具有較好的可靠性、實時性和靈活性。CAN智能節點不僅可以應用于集散控制系統,還可以用于其它分布式控制系統。
責任編輯:gt












 工商網監
工商網監
評論