 電子發(fā)燒友App
電子發(fā)燒友App


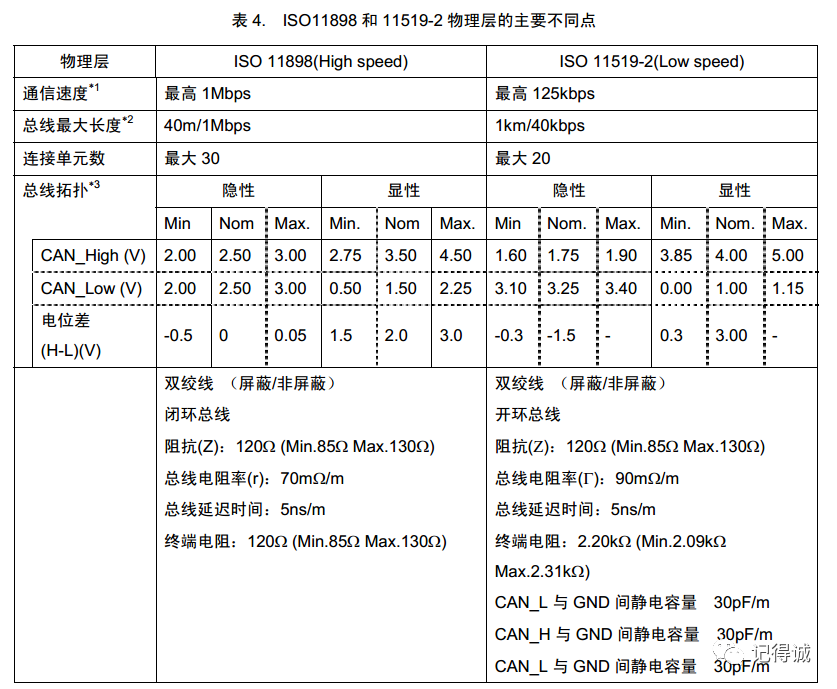
CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network)的簡(jiǎn)稱,它是由研發(fā)和生產(chǎn)汽車(chē)電子產(chǎn)品著稱的德國(guó)BOSCH公司開(kāi)發(fā)的,并最終成為國(guó)際標(biāo)準(zhǔn)(ISO11519以及ISO11898),是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。 ? 兩個(gè)標(biāo)準(zhǔn)的差異點(diǎn)如下: ?
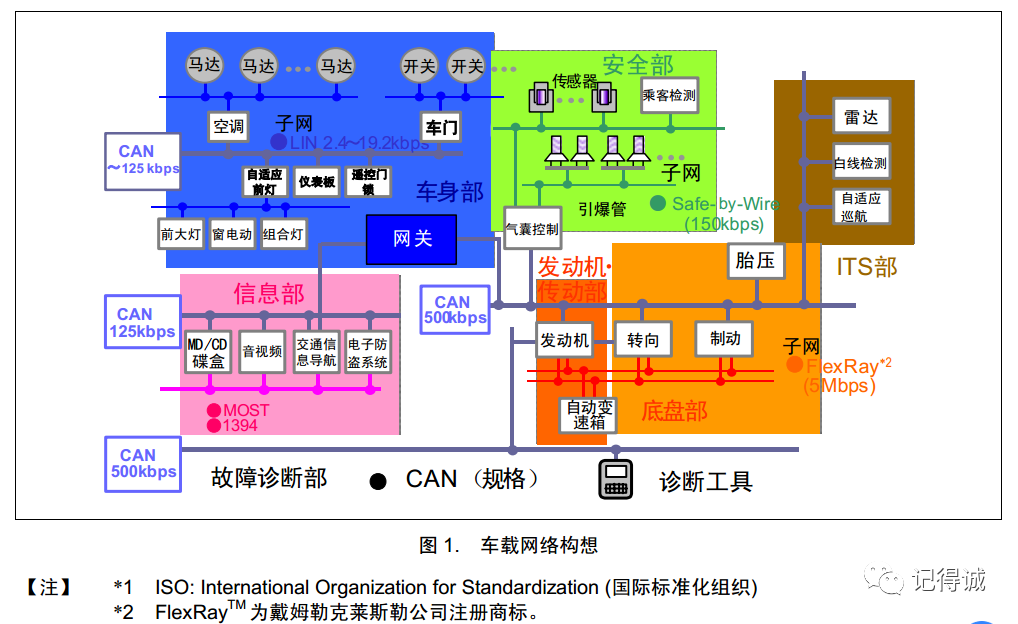
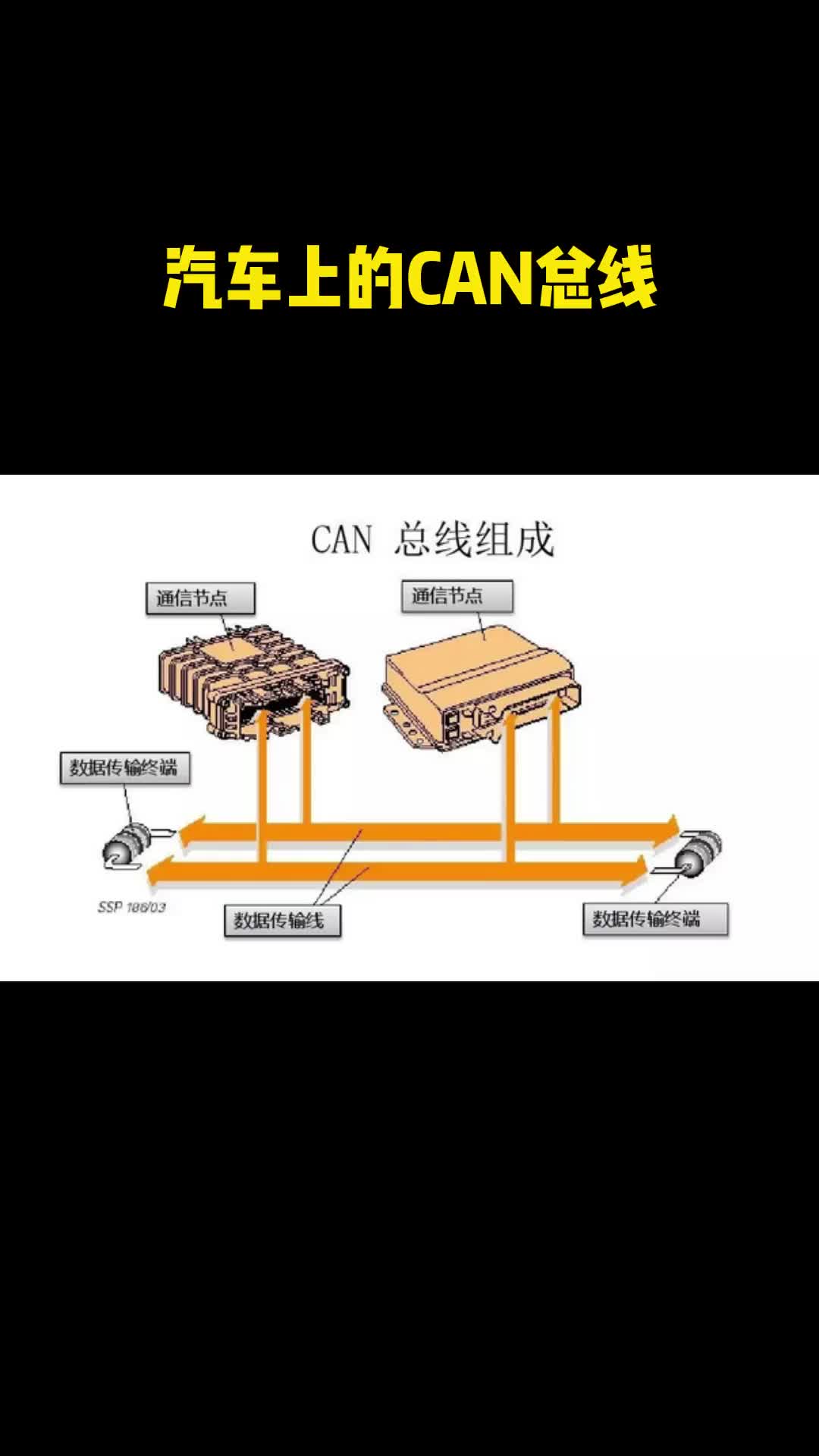
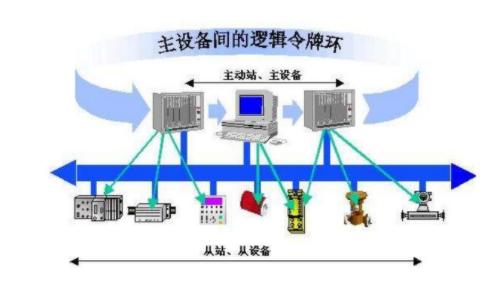
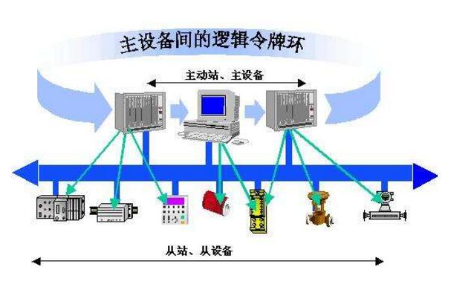
? CAN總線協(xié)議已經(jīng)成為汽車(chē)計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專(zhuān)為大型貨車(chē)和重工機(jī)械車(chē)輛設(shè)計(jì)的J1939協(xié)議。 ? 近年來(lái),它具有的高可靠性和良好的錯(cuò)誤檢測(cè)能力受到重視,被廣泛應(yīng)用于汽車(chē)計(jì)算機(jī)控制系統(tǒng)和環(huán)境溫度惡劣、電磁輻射強(qiáng)及振動(dòng)大的工業(yè)環(huán)境。 ? 我們來(lái)貼一個(gè)車(chē)載網(wǎng)絡(luò)構(gòu)想圖。 ?
?1 CAN物理層? 與I2C、SPI等具有時(shí)鐘信號(hào)的同步通訊方式不同,CAN通訊并不是以時(shí)鐘信號(hào)來(lái)進(jìn)行同步的,它是一種異步通訊,只有CAN_High和CAN_Low兩條信號(hào)線,共同構(gòu)成一組差分信號(hào)線,以差分信號(hào)的形式進(jìn)行通訊。我們來(lái)看一個(gè)示意圖。 ?
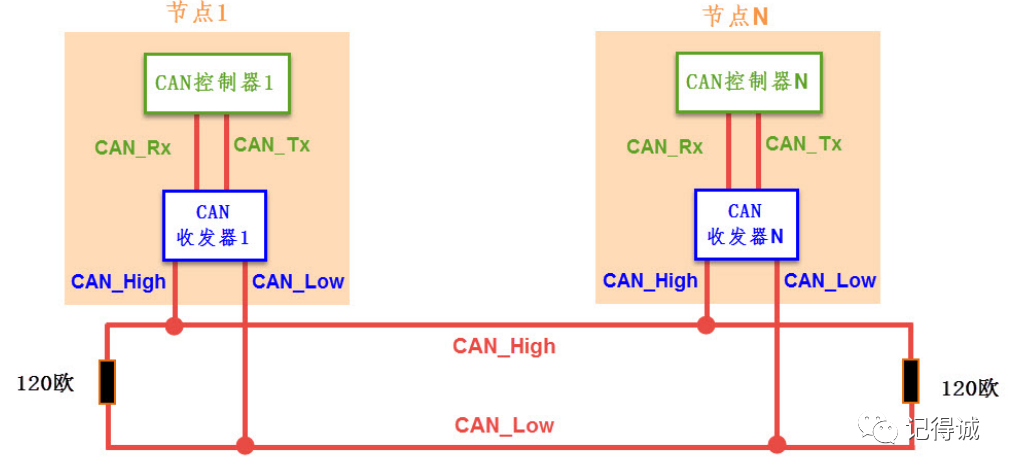
?1.1 閉環(huán)總線網(wǎng)絡(luò)? CAN物理層的形式主要有兩種,圖中的CAN通訊網(wǎng)絡(luò)是一種遵循ISO11898標(biāo)準(zhǔn)的高速、短距離“閉環(huán)網(wǎng)絡(luò)”,它的總線最大長(zhǎng)度為40m,通信速度最高為1Mbps,總線的兩端各要求有一個(gè)“120 歐”的電阻。 ?
?1.2 開(kāi)環(huán)總線網(wǎng)絡(luò)? 圖中的是遵循ISO11519-2標(biāo)準(zhǔn)的低速、遠(yuǎn)距離“開(kāi)環(huán)網(wǎng)絡(luò)”,它的最大傳輸距離為1km,最高通訊速率為125kbps,兩根總線是獨(dú)立的、不形成閉環(huán),要求每根總線上各串聯(lián)有一個(gè)“2.2千歐”的電阻。 ?
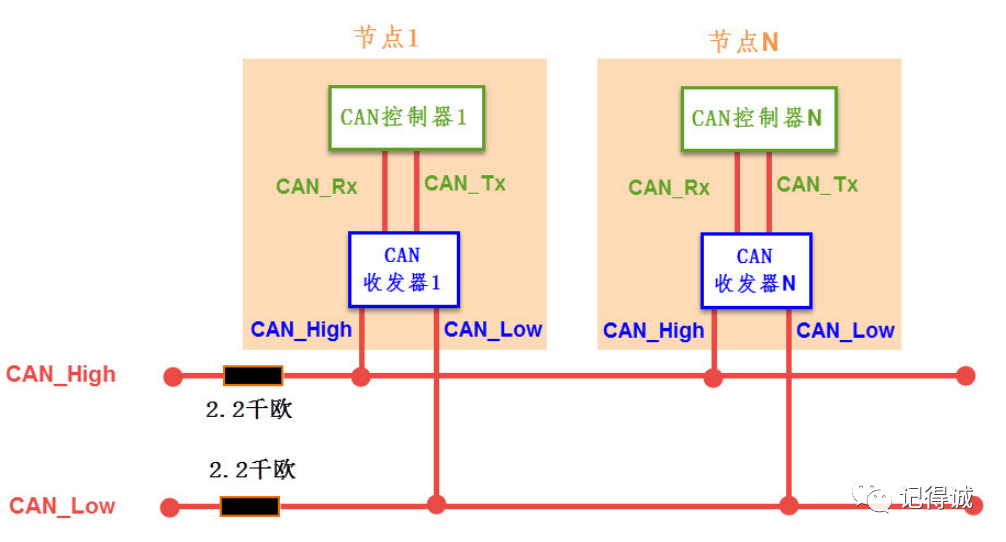
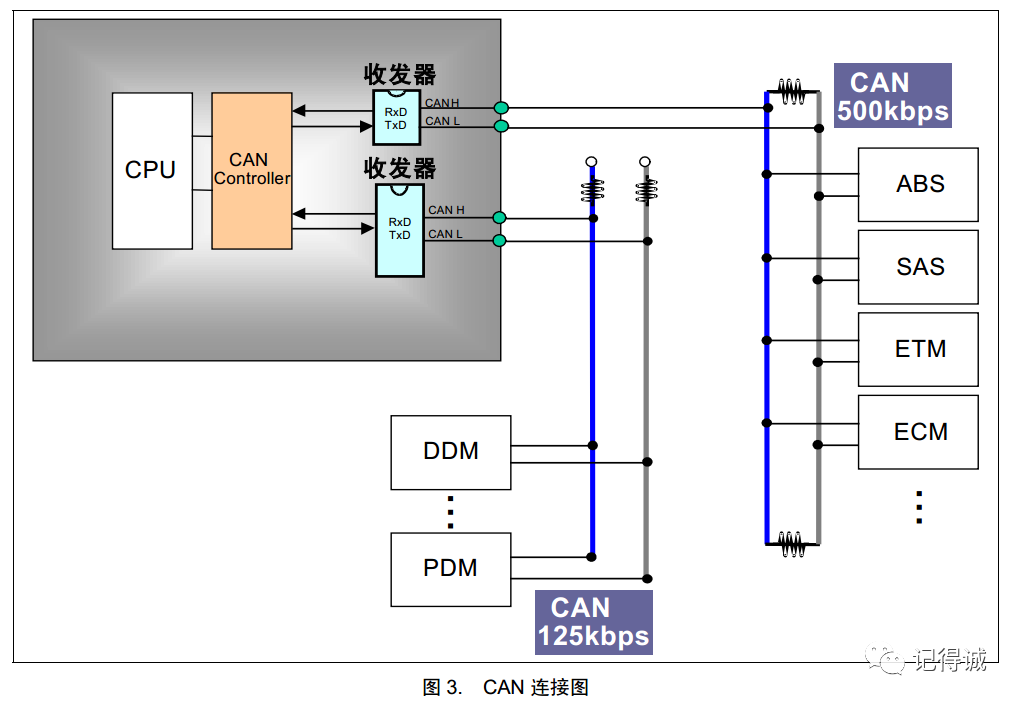
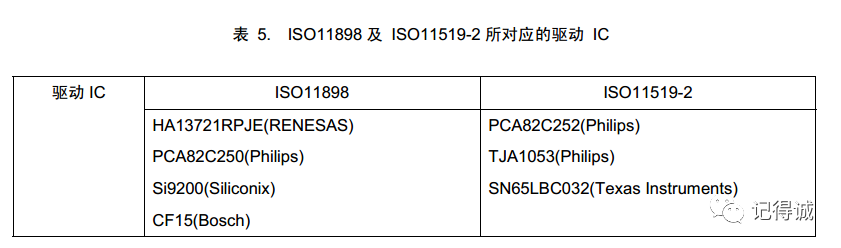
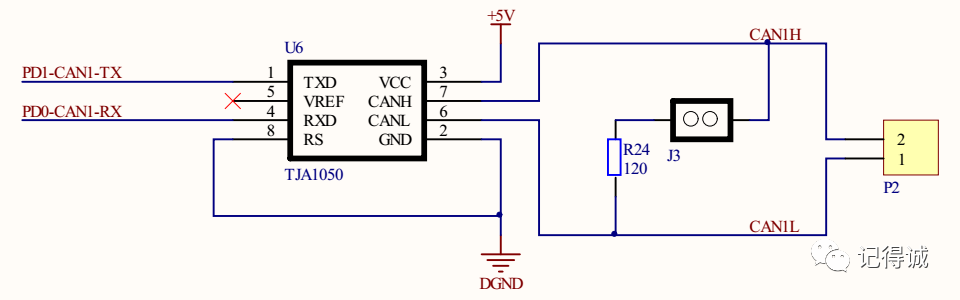
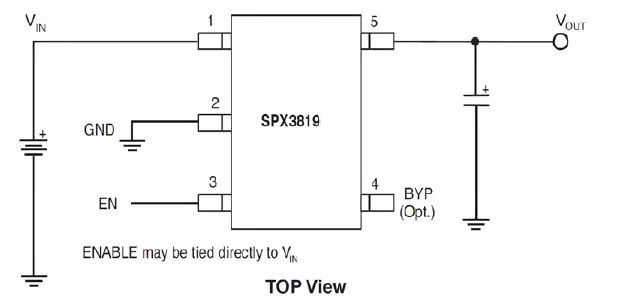
?1.3 通訊節(jié)點(diǎn)? 從CAN通訊網(wǎng)絡(luò)圖可了解到,CAN總線上可以掛載多個(gè)通訊節(jié)點(diǎn),節(jié)點(diǎn)之間的信號(hào)經(jīng)過(guò)總線傳輸,實(shí)現(xiàn)節(jié)點(diǎn)間通訊。 ? 由于CAN通訊協(xié)議不對(duì)節(jié)點(diǎn)進(jìn)行地址編碼,而是對(duì)數(shù)據(jù)內(nèi)容進(jìn)行編碼的,所以網(wǎng)絡(luò)中的節(jié)點(diǎn)個(gè)數(shù)理論上不受限制,只要總線的負(fù)載足夠即可,可以通過(guò)中繼器增強(qiáng)負(fù)載。 ? CAN通訊節(jié)點(diǎn)由一個(gè)CAN控制器及CAN收發(fā)器組成,控制器與收發(fā)器之間通過(guò)CAN_Tx及CAN_Rx信號(hào)線相連,收發(fā)器與CAN總線之間使用CAN_High及CAN_Low信號(hào)線相連。 ? 其中CAN_Tx及CAN_Rx使用普通的類(lèi)似TTL邏輯信號(hào),而CAN_High及CAN_Low是一對(duì)差分信號(hào)線,使用比較特別的差分信號(hào),下一小節(jié)再詳細(xì)說(shuō)明。 ? 當(dāng)CAN節(jié)點(diǎn)需要發(fā)送數(shù)據(jù)時(shí),控制器把要發(fā)送的二進(jìn)制編碼通過(guò)CAN_Tx線發(fā)送到收發(fā)器,然后由收發(fā)器把這個(gè)普通的邏輯電平信號(hào)轉(zhuǎn)化成差分信號(hào),通過(guò)差分線CAN_High和CAN_Low線輸出到CAN總線網(wǎng)絡(luò)。 ? 而通過(guò)收發(fā)器接收總線上的數(shù)據(jù)到控制器時(shí),則是相反的過(guò)程,收發(fā)器把總線上收到的CAN_High及CAN_Low信號(hào)轉(zhuǎn)化成普通的邏輯電平信號(hào),通過(guò)CAN_Rx輸出到控制器中。 ? 例如,STM32的CAN片上外設(shè)就是通訊節(jié)點(diǎn)中的控制器,為了構(gòu)成完整的節(jié)點(diǎn),還要給它外接一個(gè)收發(fā)器,在我們實(shí)驗(yàn)板中使用型號(hào)為T(mén)JA1050的芯片作為CAN收發(fā)器。 ? CAN控制器與CAN收發(fā)器的關(guān)系如同TTL串口與MAX3232電平轉(zhuǎn)換芯片的關(guān)系,MAX3232芯片把TTL電平的串口信號(hào)轉(zhuǎn)換成RS-232電平的串口信號(hào),CAN收發(fā)器的作用則是把CAN控制器的TTL電平信號(hào)轉(zhuǎn)換成差分信號(hào) (或者相反) 。 ? 目前有以下CAN電平轉(zhuǎn)換芯片(不全) ?
? 我們來(lái)用TJA1050來(lái)看下原理圖: ?
?1.4 差分信號(hào)? 差分信號(hào)又稱差模信號(hào),與傳統(tǒng)使用單根信號(hào)線電壓表示邏輯的方式有區(qū)別,使用差分信號(hào)傳輸時(shí),需要兩根信號(hào)線,這兩個(gè)信號(hào)線的振幅相等,相位相反,通過(guò)兩根信號(hào)線的電壓差值來(lái)表示邏輯 0 和邏輯 1。 ? 見(jiàn)下圖,它使用了V+與V-信號(hào)的差值表達(dá)出了圖下方的信號(hào)。 ?
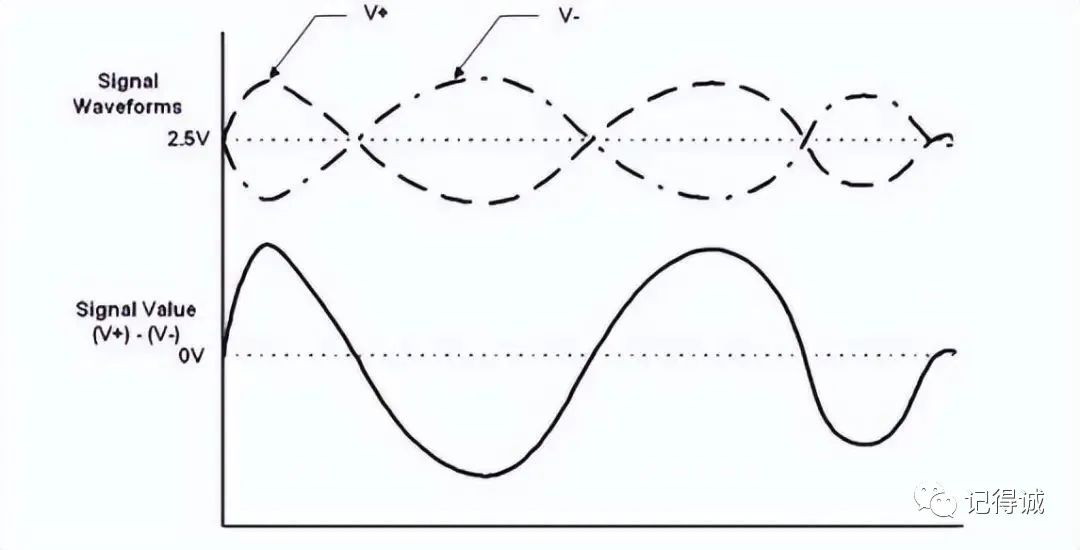
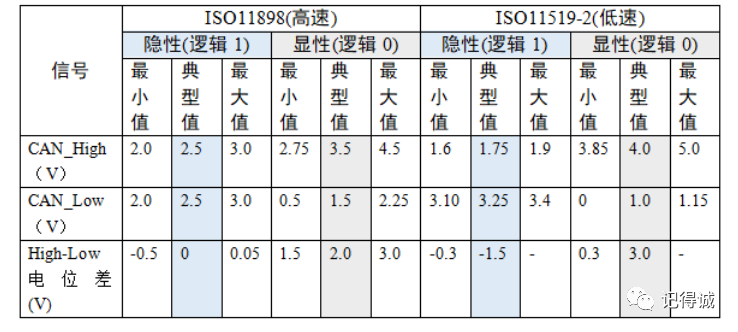
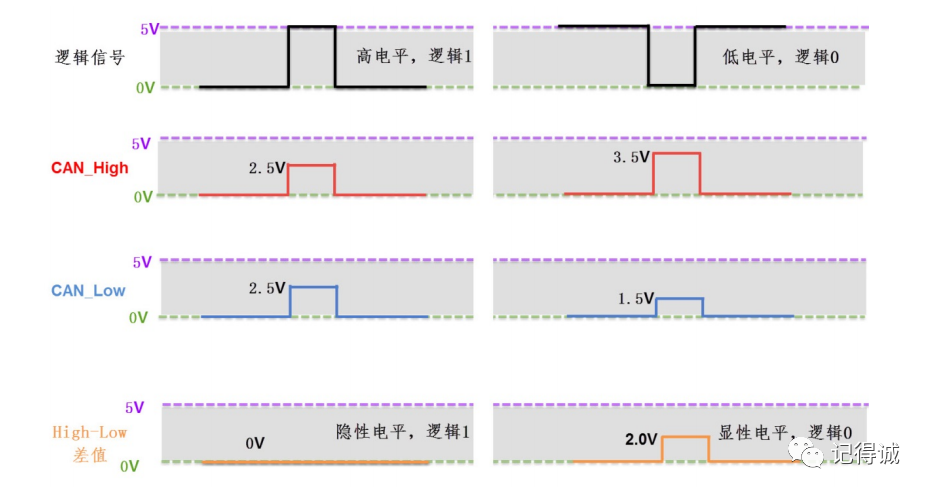
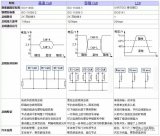
? 相對(duì)于單信號(hào)線傳輸?shù)姆绞剑褂貌罘中盘?hào)傳輸具有如下優(yōu)點(diǎn): ? (1)抗干擾能力強(qiáng),當(dāng)外界存在噪聲干擾時(shí),幾乎會(huì)同時(shí)耦合到兩條信號(hào)線上,而接收端只關(guān)心兩個(gè)信號(hào)的差值,所以外界的共模噪聲可以被完全抵消。 ? 舉一個(gè)例子,正常的單線假設(shè)邏輯1是3.3V,邏輯0假設(shè)是0V,但是如果有噪聲,把3.3V弄成了0V(極端),把0V弄成了-3.3V,此時(shí)就邏輯錯(cuò)誤,但是有Can高/Can低一般都作用于兩根線,所以兩個(gè)雖然都有噪聲影響,但是差值還是不變的 ? (2)能有效抑制它對(duì)外部的電磁干擾,同樣的道理,由于兩根信號(hào)的極性相反,他們對(duì)外輻射的電磁場(chǎng)可以相互抵消,耦合的越緊密,泄放到外界的電磁能量越少。 ? 舉一個(gè)例子,假設(shè)一根是10V,一根是-10V,單跟都會(huì)對(duì)外部造成電磁干擾,但是CAN可以把線擰在一起,跟編麻花一樣,可以互相抵消電子干擾 ? (3)時(shí)序定位精確,由于差分信號(hào)的開(kāi)關(guān)變化是位于兩個(gè)信號(hào)的交點(diǎn),而不像普通單端信號(hào)依靠高低兩個(gè)閾值電壓判斷,因而受工藝,溫度的影響小,能降低時(shí)序上的誤差,同時(shí)也更適合于低幅度信號(hào)的電路。 ? 由于差分信號(hào)線具有這些優(yōu)點(diǎn),所以在USB協(xié)議、485協(xié)議、以太網(wǎng)協(xié)議及CAN協(xié)議的物理層中,都使用了差分信號(hào)傳輸。 ?1.5 CAN協(xié)議中的差分信號(hào)? CAN協(xié)議中對(duì)它使用的CAN_High及CAN_Low表示的差分信號(hào)做了規(guī)定,見(jiàn)表及圖。 ? 以高速CAN協(xié)議為例,當(dāng)表示邏輯1時(shí) (隱性電平) ,CAN_High和CAN_Low 線上的電壓均為2.5v,即它們的電壓差 VH-VL=0V;而表示邏輯0時(shí) (顯性電平) ,CAN_High的電平為3.5V,CAN_Low線的電平為1.5V,即它們的電壓差為 VH-VL=2V。 ? 例如,當(dāng)CAN收發(fā)器從CAN_Tx線接收到來(lái)自CAN控制器的低電平信號(hào)時(shí) (邏輯0),它會(huì)使CAN_High輸出3.5V,同時(shí)CAN_Low輸出1.5V,從而輸出顯性電平表示邏輯0 。 ?
? 在CAN總線中,必須使它處于隱性電平 (邏輯1) 或顯性電平 (邏輯0) 中的其中一個(gè)狀態(tài)。假如有兩個(gè)CAN通訊節(jié)點(diǎn),在同一時(shí)間,一個(gè)輸出隱性電平,另一個(gè)輸出顯性電平,類(lèi)似I2C總線的“線與”特性將使它處于顯性電平狀態(tài),顯性電平的名字就是這樣來(lái)的,即可以認(rèn)為顯性具有優(yōu)先的意味。 ?
? 由于 CAN 總線協(xié)議的物理層只有1對(duì)差分線,在一個(gè)時(shí)刻只能表示一個(gè)信號(hào),所以對(duì)通訊節(jié)點(diǎn)來(lái)說(shuō),CAN通訊是半雙工的,收發(fā)數(shù)據(jù)需要分時(shí)進(jìn)行。在CAN的通訊網(wǎng)絡(luò)中,因?yàn)楣灿每偩€,在整個(gè)網(wǎng)絡(luò)中同一時(shí)刻只能有一個(gè)通訊節(jié)點(diǎn)發(fā)送信號(hào),其余的節(jié)點(diǎn)在該時(shí)刻都只能接收。 ?2 CAN協(xié)議層?2.1 CAN的波特率及位同步? 由于CAN屬于異步通訊,沒(méi)有時(shí)鐘信號(hào)線,連接在同一個(gè)總線網(wǎng)絡(luò)中的各個(gè)節(jié)點(diǎn)會(huì)像串口異步通訊那樣,節(jié)點(diǎn)間使用約定好的波特率進(jìn)行通訊,特別地,CAN還會(huì)使用“位同步”的方式來(lái)抗干擾、吸收誤差,實(shí)現(xiàn)對(duì)總線電平信號(hào)進(jìn)行正確的采樣,確保通訊正常。 ?2.2 位時(shí)序分解? 為了實(shí)現(xiàn)位同步,CAN協(xié)議把每一個(gè)數(shù)據(jù)位的時(shí)序分解成如圖 所示的SS段、PTS段、PBS1段、PBS2段,這四段的長(zhǎng)度加起來(lái)即為一個(gè)CAN數(shù)據(jù)位的長(zhǎng)度。分解后最小的時(shí)間單位是Tq,而一個(gè)完整的位由8~25個(gè)Tq組成。 ? 為方便表示,圖中的高低電平直接代表信號(hào)邏輯0或邏輯1(不是差分信號(hào))。 ?
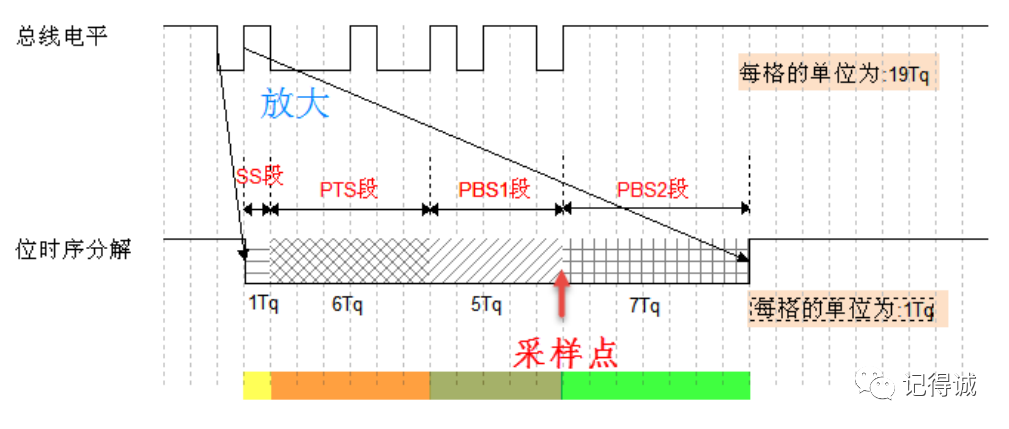
? 該圖中表示的CAN通訊信號(hào)每一個(gè)數(shù)據(jù)位的長(zhǎng)度為19Tq,其中SS段占1Tq,PTS段占6Tq, PBS1段占5Tq, PBS2段占7Tq。 ? 信號(hào)的采樣點(diǎn)位于PBS1段與PBS2段之間,通過(guò)控制各段的長(zhǎng)度,可以對(duì)采樣點(diǎn)的位置進(jìn)行偏移,以便準(zhǔn)確地采樣。 ? 各段的作用如介紹下: ?
SS段 (SYNC SEG)
SS譯為同步段,若通訊節(jié)點(diǎn)檢測(cè)到總線上信號(hào)的跳變沿被包含在SS段的范圍之內(nèi),則表示節(jié)點(diǎn)與總線的時(shí)序是同步的,當(dāng)節(jié)點(diǎn)與總線同步時(shí),采樣點(diǎn)采集到的總線電平即可被確定為該位的電平。SS段的大小固定為1Tq。 ?
PTS段 (PROP SEG)
PTS譯為傳播時(shí)間段,這個(gè)時(shí)間段是用于補(bǔ)償網(wǎng)絡(luò)的物理延時(shí)時(shí)間。是總線上輸入比較器延時(shí)和輸出驅(qū)動(dòng)器延時(shí)總和的兩倍。PTS段的大小可以為1~8Tq。 ?
PBS1段 (PHASE SEG1)
PBS1譯為相位緩沖段,主要用來(lái)補(bǔ)償邊沿階段的誤差,它的時(shí)間長(zhǎng)度在重新同步的時(shí)候可以加長(zhǎng)。PBS1段的初始大小可以為1~8Tq。 ?
PBS2段 (PHASE SEG2)
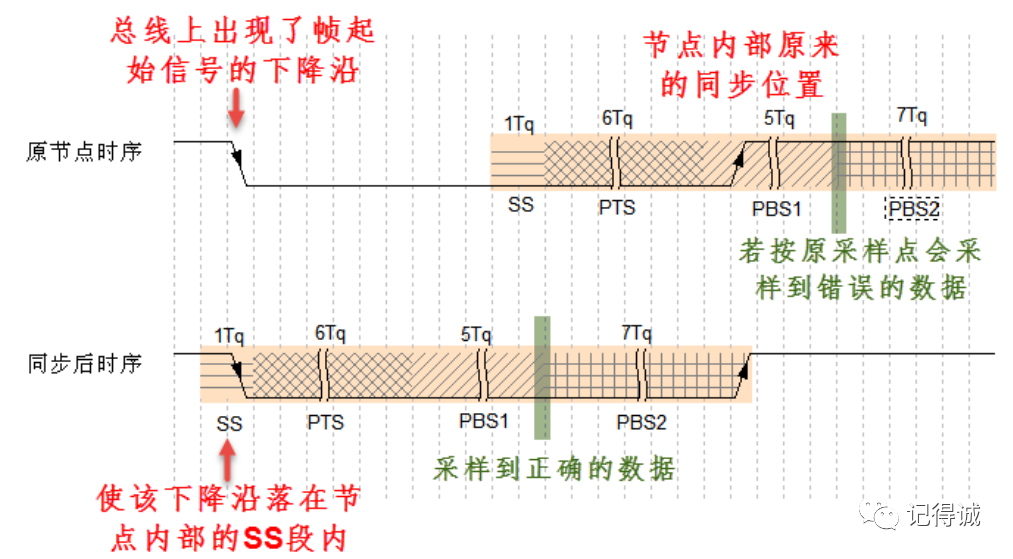
PBS2這是另一個(gè)相位緩沖段,也是用來(lái)補(bǔ)償邊沿階段誤差的,它的時(shí)間長(zhǎng)度在重新同步時(shí)可以縮短。PBS2段的初始大小可以為2~8Tq。 ?2.3 通訊的波特率? 總線上的各個(gè)通訊節(jié)點(diǎn)只要約定好1個(gè)Tq的時(shí)間長(zhǎng)度以及每一個(gè)數(shù)據(jù)位占據(jù)多少個(gè)Tq,就可以確定CAN通訊的波特率。 ? 例如,假設(shè)上圖中的1Tq=1us,而每個(gè)數(shù)據(jù)位由19個(gè)Tq組成,則傳輸一位數(shù)據(jù)需要時(shí)間T1bit=19us,從而每秒可以傳輸?shù)臄?shù)據(jù)位個(gè)數(shù)為:1x10次方/19 = 52631.6 (bps) ? 這個(gè)每秒可傳輸?shù)臄?shù)據(jù)位的個(gè)數(shù)即為通訊中的波特率。 ?2.4 同步過(guò)程分析? 波特率只是約定了每個(gè)數(shù)據(jù)位的長(zhǎng)度,數(shù)據(jù)同步還涉及到相位的細(xì)節(jié),這個(gè)時(shí)候就需要用到數(shù)據(jù)位內(nèi)的SS、PTS、PBS1及PBS2段了。根據(jù)對(duì)段的應(yīng)用方式差異, CAN的數(shù)據(jù)同步分為硬同步和重新同步。其中硬同步只是當(dāng)存在“幀起始信號(hào)”時(shí)起作用,無(wú)法確保后續(xù)一連串的位時(shí)序都是同步的,而重新同步方式可解決該問(wèn)題,這兩種方式具體介紹如下: ?① 硬同步? 若某個(gè)CAN節(jié)點(diǎn)通過(guò)總線發(fā)送數(shù)據(jù)時(shí),它會(huì)發(fā)送一個(gè)表示通訊起始的信號(hào) (即下一小節(jié)介紹的幀起始信號(hào)),該信號(hào)是一個(gè)由高變低的下降沿。而掛載到CAN總線上的通訊節(jié)點(diǎn)在不發(fā)送數(shù)據(jù)時(shí),會(huì)時(shí)刻檢測(cè)總線上的信號(hào)。見(jiàn)圖 ,可以看到當(dāng)總線出現(xiàn)幀起始信號(hào)時(shí),某節(jié)點(diǎn)檢測(cè)到總線的幀起始信號(hào)不在節(jié)點(diǎn)內(nèi)部時(shí)序的SS段范圍,所以判斷它自己的內(nèi)部時(shí)序與總線不同步,因而這個(gè)狀態(tài)的采樣點(diǎn)采集得的數(shù)據(jù)是不正確的。所以節(jié)點(diǎn)以硬同步的方式調(diào)整,把自己的位時(shí)序中的SS段平移至總線出現(xiàn)下降沿的部分,獲得同步,同步后采樣點(diǎn)就可以采集得正確數(shù)據(jù)了。 ?
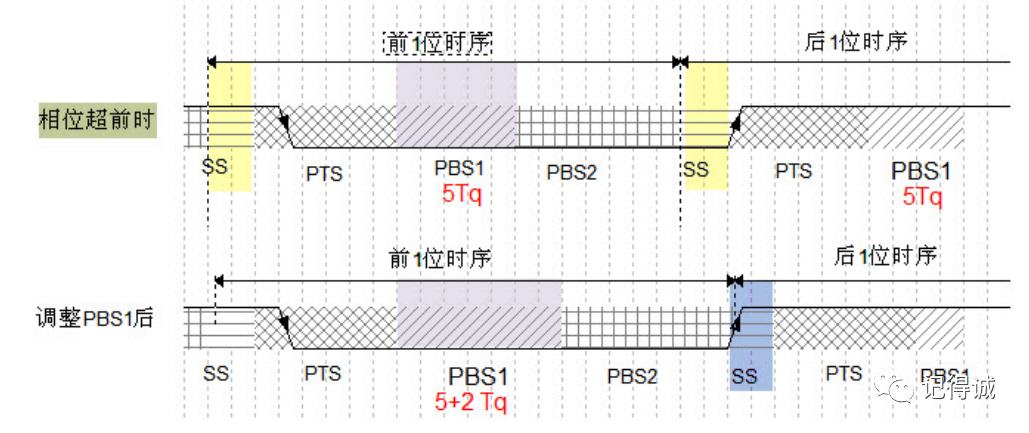
?② 重新同步? 前面的硬同步只是當(dāng)存在幀起始信號(hào)時(shí)才起作用,如果在一幀很長(zhǎng)的數(shù)據(jù)內(nèi),節(jié)點(diǎn)信號(hào)與總線信號(hào)相位有偏移時(shí),這種同步方式就無(wú)能為力了。因而需要引入重新同步方式,它利用普通數(shù)據(jù)位的高至低電平的跳變沿來(lái)同步 (幀起始信號(hào)是特殊的跳變沿)。 ? 重新同步與硬同步方式相似的地方是它們都使用SS段來(lái)進(jìn)行檢測(cè),同步的目的都是使節(jié)點(diǎn)內(nèi)的SS段把跳變沿包含起來(lái)。 ? 重新同步的方式分為超前和滯后兩種情況,以總線跳變沿與SS段的相對(duì)位置進(jìn)行區(qū)分。 ? 第一種相位超前的情況如圖 ,節(jié)點(diǎn)從總線的邊沿跳變中,檢測(cè)到它內(nèi)部的時(shí)序比總線的時(shí)序相對(duì)超前2Tq,這時(shí)控制器在下一個(gè)位時(shí)序中的PBS1段增加2Tq的時(shí)間長(zhǎng)度,使得節(jié)點(diǎn)與總線時(shí)序重新同步。 ?
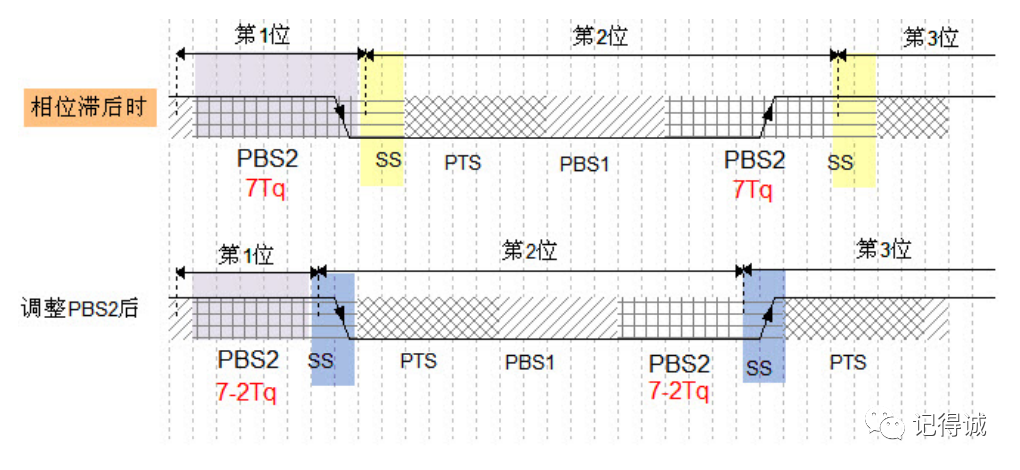
? 第二種相位滯后的情況如圖 ,節(jié)點(diǎn)從總線的邊沿跳變中,檢測(cè)到它的時(shí)序比總線的時(shí)序相對(duì)滯后2Tq,這時(shí)控制器在前一個(gè)位時(shí)序中的PBS2段減少2Tq的時(shí)間長(zhǎng)度,獲得同步。 ?
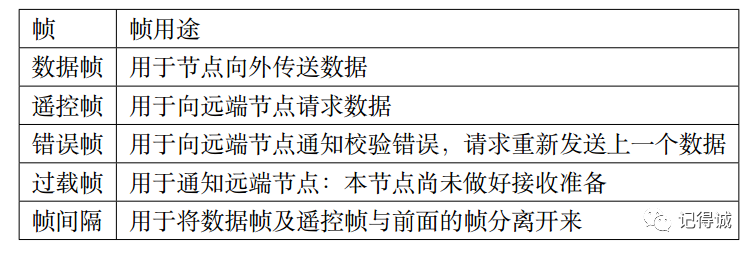
? 在重新同步的時(shí)候,PBS1和PBS2中增加或減少的這段時(shí)間長(zhǎng)度被定義為“重新同步補(bǔ)償寬度SJW(reSynchronization Jump Width)”。 ? 一般來(lái)說(shuō)CAN控制器會(huì)限定SJW的最大值,如限定了最大SJW=3Tq時(shí),單次同步調(diào)整的時(shí)候不能增加或減少超過(guò)3Tq的時(shí)間長(zhǎng)度,若有需要,控制器會(huì)通過(guò)多次小幅度調(diào)整來(lái)實(shí)現(xiàn)同步。當(dāng)控制器設(shè)置的SJW極限值較大時(shí),可以吸收的誤差加大,但通訊的速度會(huì)下降 ?2.5 CAN的報(bào)文種類(lèi)及結(jié)構(gòu)? 在SPI通訊中,片選、時(shí)鐘信號(hào)、數(shù)據(jù)輸入及數(shù)據(jù)輸出這4個(gè)信號(hào)都有單獨(dú)的信號(hào)線,I2C協(xié)議包含有時(shí)鐘信號(hào)及數(shù)據(jù)信號(hào)2條信號(hào)線,異步串口包含接收與發(fā)送2條信號(hào)線,這些協(xié)議包含的信號(hào)都比CAN協(xié)議要豐富,它們能輕易進(jìn)行數(shù)據(jù)同步或區(qū)分?jǐn)?shù)據(jù)傳輸方向。 ? 而CAN使用的是兩條差分信號(hào)線,只能表達(dá)一個(gè)信號(hào),簡(jiǎn)潔的物理層決定了CAN必然要配上一套更復(fù)雜的協(xié)議,如何用一個(gè)信號(hào)通道實(shí)現(xiàn)同樣、甚至更強(qiáng)大的功能呢? ? CAN協(xié)議給出的解決方案是對(duì)數(shù)據(jù)、操作命令 (如讀/寫(xiě)) 以及同步信號(hào)進(jìn)行打包,打包后的這些內(nèi)容稱為報(bào)文。 ?2.5.1 報(bào)文的種類(lèi)? 在原始數(shù)據(jù)段的前面加上傳輸起始標(biāo)簽、片選 (識(shí)別) 標(biāo)簽和控制標(biāo)簽,在數(shù)據(jù)的尾段加上CRC校驗(yàn)標(biāo)簽、應(yīng)答標(biāo)簽和傳輸結(jié)束標(biāo)簽,把這些內(nèi)容按特定的格式打包好,就可以用一個(gè)通道表達(dá)各種信號(hào)了,各種各樣的標(biāo)簽就如同SPI中各種通道上的信號(hào),起到了協(xié)同傳輸?shù)淖饔谩.?dāng)整個(gè)數(shù)據(jù)包被傳輸?shù)狡渌O(shè)備時(shí),只要這些設(shè)備按格式去解讀,就能還原出原始數(shù)據(jù),這樣的報(bào)文就被稱為CAN的“數(shù)據(jù)幀”。 ? 為了更有效地控制通訊,CAN一共規(guī)定了 5 種類(lèi)型的幀,它們的類(lèi)型及用途說(shuō)明如下表。 ?
?2.5.2 數(shù)據(jù)幀的結(jié)構(gòu)? 數(shù)據(jù)幀是在CAN通訊中最主要、最復(fù)雜的報(bào)文,我們來(lái)了解它的結(jié)構(gòu),見(jiàn)下圖: ?
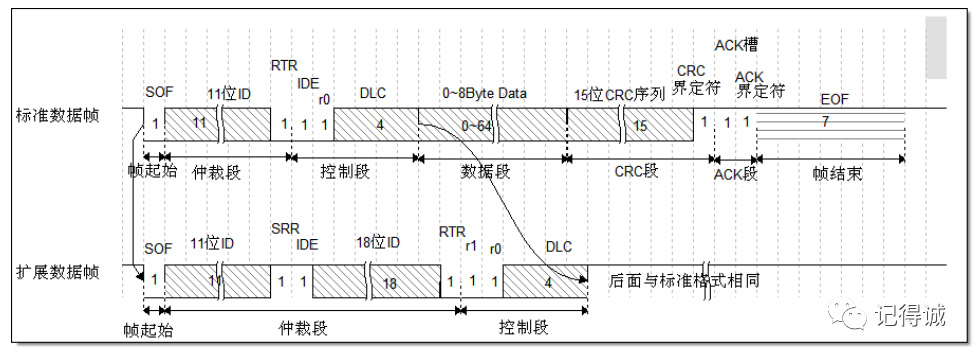
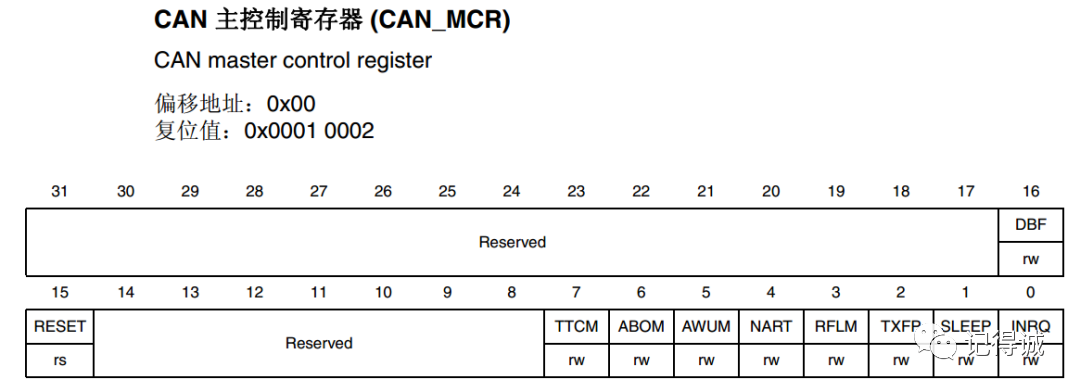
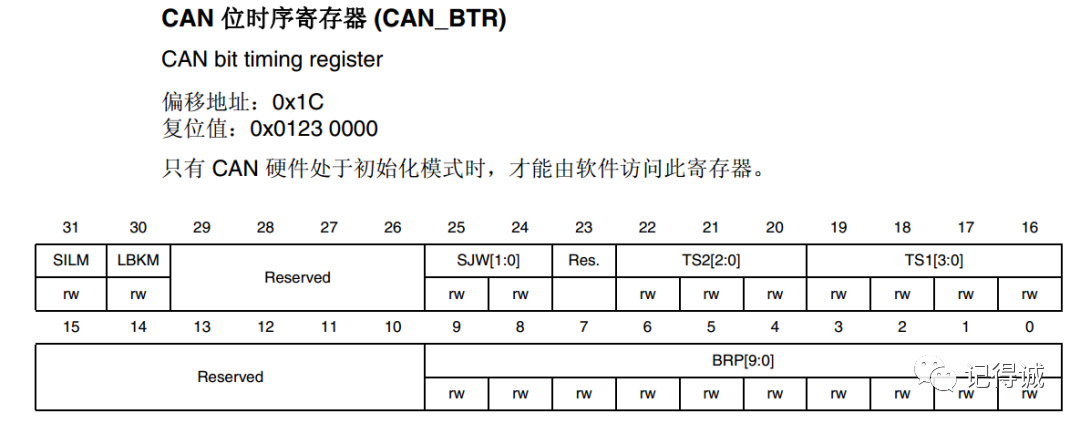
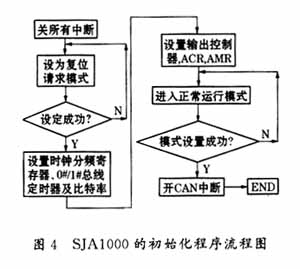
? 數(shù)據(jù)幀以一個(gè)顯性位 (邏輯0) 開(kāi)始, 7個(gè)連續(xù)的隱性位 (邏輯1) 結(jié)束,在它們之間,分別有仲裁段、控制段、數(shù)據(jù)段、CRC段和ACK段。 ?3 CAN控制內(nèi)核? 框圖中標(biāo)號(hào)處的CAN控制內(nèi)核包含了各種控制寄存器及狀態(tài)寄存器,我們主要講解其中的主控制寄存器CAN_MCR及位時(shí)序寄存器CAN_BTR。 ?3.1 主控制寄存器CAN_MCR? 主控制寄存器CAN_MCR負(fù)責(zé)管理CAN的工作模式,它使用以下寄存器位實(shí)現(xiàn)控制。 ?3.2 位時(shí)序寄存器 (CAN_BTR) 及波特率?
?
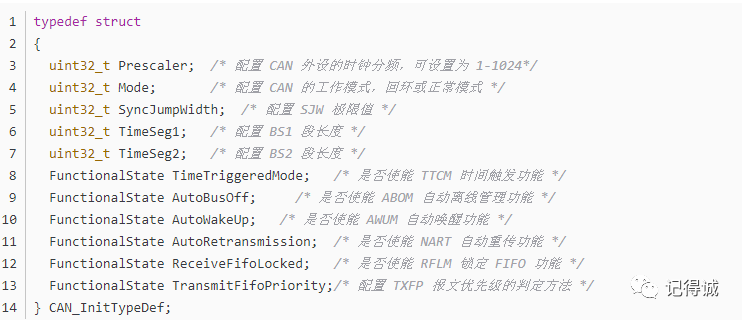
? 代碼清單CAN初始化結(jié)構(gòu) ?
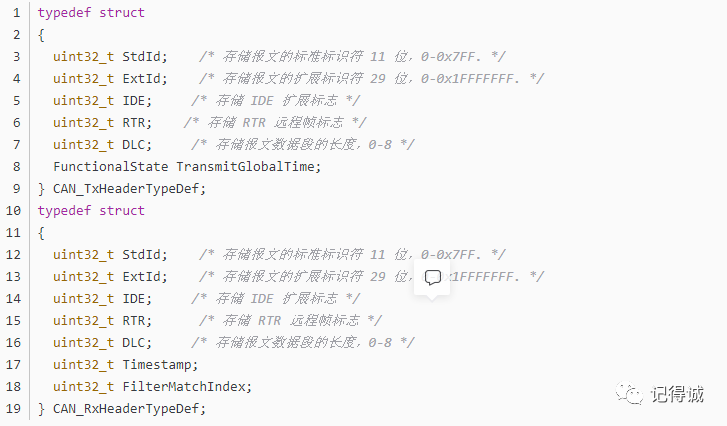
? CAN發(fā)送及接收結(jié)構(gòu)體 ?
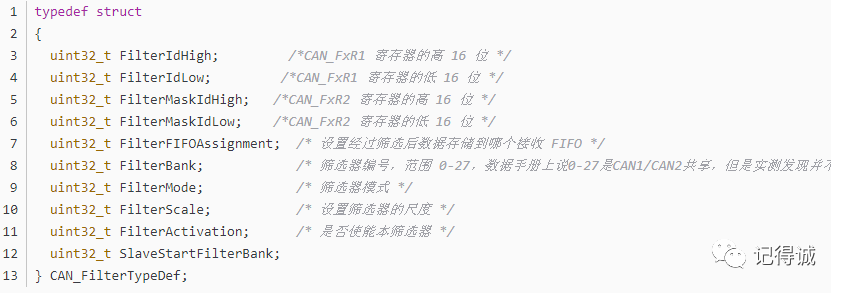
? CAN篩選器結(jié)構(gòu)體 ?
? 審核編輯 :李倩
?

























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論