CAN總線(xiàn)和基于CAN總線(xiàn)的診斷完全不是一個(gè)概念,CAN總線(xiàn)的硬件也不一定是OBD的硬件。至于“多去4S店問(wèn)問(wèn)技師,車(chē)廠的人大部分的人都不一定比這些人懂的多”,你讓這些技師給我寫(xiě)個(gè)能用的ECU CAN接口出來(lái)?
2016-01-27 09:58:16 14871
14871 在CAN網(wǎng)絡(luò)中,所有節(jié)點(diǎn)的數(shù)據(jù)收發(fā)共享一條總線(xiàn)。當(dāng)面對(duì)未知的多節(jié)點(diǎn)CAN總線(xiàn)網(wǎng)絡(luò)時(shí),如何準(zhǔn)確分析各節(jié)點(diǎn)間的通信協(xié)議呢?
2018-02-27 09:29:2715232 
為了防止故障節(jié)點(diǎn)干擾甚至阻塞整個(gè)CAN網(wǎng)絡(luò)系統(tǒng),CAN協(xié)議實(shí)現(xiàn)了復(fù)雜的故障限制機(jī)制。為了保證通信的正常,CAN 2.0 總線(xiàn)協(xié)議總線(xiàn)中各節(jié)點(diǎn)需要采取以下措施進(jìn)行錯(cuò)誤檢測(cè)。
2022-11-08 17:12:447486 在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線(xiàn)結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒(méi)有關(guān)于總線(xiàn)拓?fù)浣Y(jié)構(gòu)的說(shuō)明):高速CAN總線(xiàn)和低速CAN總線(xiàn),區(qū)別表如下所示。
2023-04-07 09:30:181836 
為了防止故障節(jié)點(diǎn)干擾甚至阻塞整個(gè)CAN網(wǎng)絡(luò)系統(tǒng),CAN協(xié)議實(shí)現(xiàn)了復(fù)雜的故障限制機(jī)制。為了保證通信的正常,CAN 2.0 總線(xiàn)協(xié)議總線(xiàn)中各節(jié)點(diǎn)需要采取以下措施進(jìn)行錯(cuò)誤檢測(cè):
2023-06-21 17:14:181840 
CAN總線(xiàn)技術(shù)已在汽車(chē)上廣泛應(yīng)用,隨著新能源車(chē)型以及自動(dòng)駕駛技術(shù)的推廣,總線(xiàn)問(wèn)題也對(duì)汽車(chē)的安全帶來(lái)風(fēng)險(xiǎn)挑戰(zhàn),本文從系統(tǒng)角度對(duì)CAN總線(xiàn)的電氣、EMC、硬件以及軟件等相關(guān)設(shè)計(jì)進(jìn)行梳理,結(jié)合現(xiàn)有總線(xiàn)系統(tǒng)設(shè)計(jì)經(jīng)驗(yàn)進(jìn)行分析與總結(jié)。
2023-11-03 10:17:21612 
這意味著變送器通過(guò)CAN收發(fā)器改變總線(xiàn)電平,并將其信息傳輸?shù)?b class="flag-6" style="color: red">CAN總線(xiàn)。接收器通過(guò)監(jiān)測(cè)總線(xiàn)電平將總線(xiàn)上的信息讀取到自己的CAN收發(fā)器中。
2024-02-19 14:53:54606 
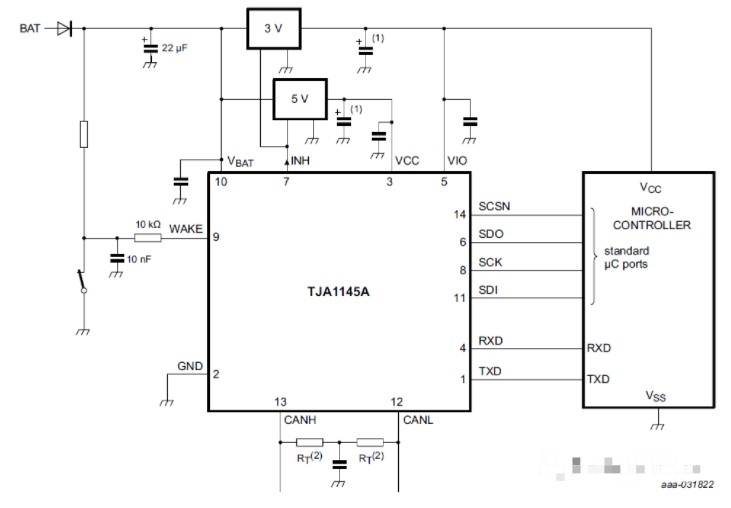
CAN Transceiver 怎么使用,列如NXP的TJA1040
2015-08-03 16:30:30
,一個(gè)CAN節(jié)點(diǎn)不使用有關(guān)系統(tǒng)結(jié)構(gòu)的任何信息,這里包含一些重要的概念:系統(tǒng)靈活性——節(jié)點(diǎn)可以在不要求所有節(jié)點(diǎn)及其應(yīng)用層改變?nèi)魏诬浖蛴布那闆r下,被接于CAN網(wǎng)絡(luò)。報(bào)文通信——一個(gè)報(bào)文的內(nèi)容由其標(biāo)示符
2014-04-27 15:16:02
中,一個(gè)CAN節(jié)點(diǎn)不使用有關(guān)系統(tǒng)結(jié)構(gòu)的任何信息,這里包含一些重要的概念:系統(tǒng)靈活性——節(jié)點(diǎn)可以在不要求所有節(jié)點(diǎn)及其應(yīng)用層改變?nèi)魏诬浖蛴布那闆r下,被接于CAN網(wǎng)絡(luò)。報(bào)文通信——一個(gè)報(bào)文的內(nèi)容由其標(biāo)示
2014-04-18 16:36:30
常見(jiàn)問(wèn)題分析。CAN總線(xiàn)和UART、I2C、SPI總線(xiàn)最大的區(qū)別主要在于取消了傳統(tǒng)的地址編碼方式,理論上講總線(xiàn)上的互聯(lián)節(jié)點(diǎn)數(shù)不受限制,擁有強(qiáng)大的握手與出錯(cuò)管理及重發(fā)機(jī)制,具有很強(qiáng)的抗干擾能力。STM32 CAN 基礎(chǔ)內(nèi)容CAN網(wǎng)絡(luò)中主要由CAN控制器和CAN收發(fā)器組成,大部分STM32內(nèi)部都集成了C
2021-08-19 07:41:06
前言CAN總線(xiàn)的應(yīng)用在現(xiàn)在看來(lái)越來(lái)越廣泛,我廠設(shè)備從最初的ARM9與ARM7平臺(tái)、期間升級(jí)過(guò)度到CortexA8與Cortex M3平臺(tái),再到現(xiàn)在的Cortex M4平臺(tái),圍繞CAN進(jìn)行了一系列
2021-07-27 07:40:12
的網(wǎng)絡(luò)。接下來(lái)是遠(yuǎn)程傳輸請(qǐng)求(RTR)位。現(xiàn)在,當(dāng)檢測(cè)到較高的RTR位時(shí),CAN網(wǎng)絡(luò)中的每個(gè)接收節(jié)點(diǎn)將知道接收到的消息是“遠(yuǎn)程幀”。什么是CAN總線(xiàn)中的遠(yuǎn)程幀?正如我們從Bosch編寫(xiě)的原始文檔中所
2020-10-02 23:00:00
應(yīng)用最廣泛的現(xiàn)場(chǎng)總線(xiàn)之一。在北美和西歐,CAN總線(xiàn)協(xié)議已經(jīng)成為汽車(chē)計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線(xiàn),并且擁有以CAN為底層協(xié)議專(zhuān)為大型貨車(chē)和重工機(jī)械車(chē)輛設(shè)計(jì)的J1939協(xié)議。CAN總線(xiàn)的特點(diǎn)(1)多主機(jī)方式工作:網(wǎng)絡(luò)上任意節(jié)點(diǎn)可在任意時(shí)刻其他節(jié)點(diǎn)發(fā)送數(shù)據(jù),通信方式靈活;(2)網(wǎng)絡(luò)上...
2022-01-13 07:52:18
前言CAN總線(xiàn)的應(yīng)用在現(xiàn)在看來(lái)越來(lái)越廣泛,我廠設(shè)備從最初的ARM9與ARM7平臺(tái)、期間升級(jí)過(guò)度到CortexA8與Cortex M3平臺(tái),再到現(xiàn)在的Cortex M4平臺(tái),圍繞CAN進(jìn)行了一系列
2021-07-27 06:18:35
10km,無(wú)損位仲裁機(jī)制,多主結(jié)構(gòu)。近些年來(lái),CAN控制器價(jià)格越來(lái)越低。 ? 低成本:ECUs通過(guò)單個(gè)CAN接口進(jìn)行通信,布線(xiàn)成本低。 ? 高集成:CAN總線(xiàn)系統(tǒng)允許在所有ECUs上進(jìn)行集中錯(cuò)誤診斷和配置。 ? ...
2022-01-12 06:08:19
can(controller area network)即控制器局域網(wǎng)絡(luò),最初是由德國(guó)bosch公司為解決汽車(chē)監(jiān)控系統(tǒng)中的自動(dòng)化系統(tǒng)集成而設(shè)計(jì)的數(shù)字信號(hào)通信協(xié)議,屬于總線(xiàn)式串行通信網(wǎng)絡(luò)。由于CAN
2019-09-20 08:06:12
CAN現(xiàn)場(chǎng)總線(xiàn)只定義了OSI網(wǎng)絡(luò)模型的第一層(物理層) 和第二層(數(shù)據(jù)鏈路層) ,而這兩層一般已被CAN硬件完全實(shí)現(xiàn)了。由于沒(méi)有規(guī)定應(yīng)用層,本身并不完整,需要一個(gè)高層協(xié)議來(lái)定義CAN報(bào)文中的11
2021-09-09 09:11:37
一、背景: 在AUTOSAR CAN網(wǎng)絡(luò)管理框架下,如果所有的節(jié)點(diǎn)都按照狀態(tài)機(jī)要求,在ReadSleep狀態(tài)下停發(fā)NM幀,在Prepare Bus-Sleep模式下停發(fā)App幀,所有節(jié)點(diǎn)可以從
2021-07-26 06:47:11
STM32 CAN總線(xiàn)通信學(xué)習(xí)筆記(一)一、CAN總線(xiàn)簡(jiǎn)介CAN 是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡(jiǎn)稱(chēng)。CAN采用數(shù)據(jù)塊編碼的方式,數(shù)據(jù)塊根據(jù)幀的類(lèi)型
2021-08-19 06:04:04
標(biāo)準(zhǔn)CAN網(wǎng)絡(luò),應(yīng)用于構(gòu)建現(xiàn)場(chǎng)總線(xiàn)測(cè)試實(shí)驗(yàn)室、工業(yè)控制、智能樓宇、汽車(chē)電子等領(lǐng)域中,進(jìn)行數(shù)據(jù)處理、數(shù)據(jù)采集、數(shù)據(jù)通訊等CAN核心控制單元。以上是武漢若比特機(jī)器人有限公司自行研發(fā)生產(chǎn)的USB轉(zhuǎn)CAN
2011-05-27 09:13:53
進(jìn)行了說(shuō)明,圖 1 描述了 CAN 協(xié)議中數(shù)據(jù)鏈路層和物理層與 OSI模型的關(guān)系。圖1 CAN分層結(jié)構(gòu)與OSI模型對(duì)比1.2 CAN-FD優(yōu)勢(shì)分析CAN-FD相比傳統(tǒng)CAN總線(xiàn),其優(yōu)勢(shì)主要有以下3點(diǎn)。(1
2023-02-14 14:22:23
、實(shí)時(shí)性和靈活性方面具有獨(dú)特的技術(shù)優(yōu)勢(shì),主要特點(diǎn)如下:? CAN 總線(xiàn)是一種多主總線(xiàn),總線(xiàn)上任意節(jié)點(diǎn)可在任意時(shí)刻主動(dòng)地向網(wǎng)絡(luò)上其他節(jié)點(diǎn)發(fā)送信息而不分主次,因此可在各節(jié)點(diǎn)之間實(shí)現(xiàn)自由通信。? CAN
2018-12-13 14:26:31
,而且能夠?qū)⒎植荚诓煌攸c(diǎn)的溫度測(cè)控模塊通過(guò)cAN現(xiàn)場(chǎng)總線(xiàn)連接起來(lái),接入PC機(jī)進(jìn)行集中監(jiān)控和管理。本系統(tǒng)采用CAN現(xiàn)場(chǎng)總線(xiàn)進(jìn)行通訊,由于一條cAN總線(xiàn)上的節(jié)點(diǎn)個(gè)數(shù)在理論上不受限制,實(shí)際應(yīng)用則主要取決于總線(xiàn)
2023-09-19 06:45:45
的是RS-485,HART等。CAN總線(xiàn)是一種全數(shù)字化的現(xiàn)場(chǎng)總線(xiàn),可靠性高,在國(guó)內(nèi)有廣泛的應(yīng)用,將現(xiàn)場(chǎng)總線(xiàn)技術(shù)應(yīng)用到閥門(mén)控制系統(tǒng)中不僅使我國(guó)的通用型閥門(mén)具有了網(wǎng)絡(luò)通信功能,而且對(duì)我國(guó)閥門(mén)電動(dòng)裝置參與國(guó)際競(jìng)爭(zhēng)也具有
2011-03-09 16:03:22
節(jié)點(diǎn)的位時(shí)間發(fā)生抖動(dòng)時(shí),即位時(shí)間為1.8us或者2.2us,將導(dǎo)致采樣點(diǎn)的邏輯判斷出現(xiàn)異常,出現(xiàn)總線(xiàn)錯(cuò)誤,導(dǎo)致CAN網(wǎng)絡(luò)系統(tǒng)死機(jī)。解決方案:在CAN網(wǎng)絡(luò)準(zhǔn)入階段,如果對(duì)接入網(wǎng)絡(luò)的節(jié)點(diǎn)進(jìn)行規(guī)范化,每個(gè)節(jié)點(diǎn)
2019-04-26 10:52:24
%時(shí),CAN通訊穩(wěn)定性開(kāi)始衰減,大于65%時(shí),穩(wěn)定性衰減加劇,超過(guò)98%時(shí),網(wǎng)絡(luò)將處于癱瘓狀態(tài)。如何保障車(chē)載網(wǎng)絡(luò)通訊的可靠性,如何行之有效的降低 CAN 總線(xiàn)負(fù)載率成為大家亟待解決的問(wèn)題。? 降低報(bào)文的傳輸
2019-12-19 15:09:07
由10個(gè)字節(jié)存貯單元組成,存貯由微控制器寫(xiě),將被發(fā)送至CAN總線(xiàn)網(wǎng)絡(luò)的報(bào)文。接收緩存器0和1(RBF0、RBF1)均由10個(gè)字節(jié)組成,交替存貯從總線(xiàn)接收的報(bào)文,當(dāng)一個(gè)緩存器分配給CPU,位流處理器可以
2015-08-17 14:21:59
電動(dòng)汽車(chē)能源管理的重要性是什么?怎么實(shí)現(xiàn)基于CAN總線(xiàn)的電動(dòng)汽車(chē)電源管理通信的設(shè)計(jì)?
2021-05-12 06:14:51
最近在學(xué)習(xí)汽車(chē)總線(xiàn)這一塊,網(wǎng)絡(luò)管理這部分平常我所了解的就是節(jié)點(diǎn)控制器自己都會(huì)有其他節(jié)點(diǎn)的CAN通訊異常報(bào)警,這個(gè)報(bào)警機(jī)制就是檢測(cè)到對(duì)方節(jié)點(diǎn)連續(xù)多少個(gè)周期沒(méi)發(fā)送報(bào)文就會(huì)報(bào)出異常,但是當(dāng)我看了一些
2018-03-21 14:53:11
控制器局域網(wǎng)(CAN)是現(xiàn)代汽車(chē)網(wǎng)絡(luò)通信與控制系統(tǒng)中的重要組成部分,《汽車(chē)CAN總線(xiàn)系統(tǒng)原理、設(shè)計(jì)與應(yīng)用》全面、系統(tǒng)地介紹了汽車(chē)CAN總線(xiàn)的基本原理、應(yīng)用層協(xié)議制定、系統(tǒng)軟件和硬件設(shè)計(jì),并且通過(guò)實(shí)例
2018-04-09 22:27:02
CAN總線(xiàn)測(cè)試內(nèi)容可以分為單節(jié)點(diǎn)測(cè)試和總線(xiàn)系統(tǒng)集成測(cè)試兩部分。在每個(gè)節(jié)點(diǎn)連接到CAN總線(xiàn)網(wǎng)絡(luò)之前都需要進(jìn)行單節(jié)點(diǎn)測(cè)試,用以確定節(jié)點(diǎn)工作正確并且不會(huì)干擾總線(xiàn)的正常通訊。總線(xiàn)系統(tǒng)集成測(cè)試則是將各個(gè)
2015-08-11 13:41:18
基于總線(xiàn)的網(wǎng)絡(luò)結(jié)構(gòu),可以達(dá)到信息共享、減少布線(xiàn)、降低成本以及提高總體可靠性的目的。通常的汽車(chē)網(wǎng)絡(luò)結(jié)構(gòu)采用多條不同速率的總線(xiàn)分別連接不同類(lèi)型的節(jié)點(diǎn),并使用網(wǎng)關(guān)服務(wù)器來(lái)實(shí)現(xiàn)整車(chē)的信息共享和網(wǎng)絡(luò)管理。
車(chē)身
2015-07-08 13:49:34
我國(guó)的汽車(chē)CAN總線(xiàn)技術(shù)起步較晚,但隨著現(xiàn)代汽車(chē)電子的不斷進(jìn)步發(fā)展,其研究和應(yīng)用正如火如荼的進(jìn)行中。CAN總線(xiàn)是一種串行多主站控制器局域網(wǎng)總線(xiàn),是一種有效支持分布式控制或?qū)崟r(shí)控制的串性通訊網(wǎng)絡(luò)
2015-08-18 14:10:28
一 . 最近接到一個(gè)案子,需要用PIC18F26Q84 進(jìn)行CAN總線(xiàn)編程,進(jìn)入到MCC 編程界面里面。先梳理一下配置寄存器的流程,以前調(diào)過(guò)MCP2515的CAN總線(xiàn)配置。流程大概是1. 進(jìn)入允許
2021-11-24 06:24:01
基于STM32的CAN總線(xiàn)通信學(xué)習(xí)筆記本文主要簡(jiǎn)單介紹CAN總線(xiàn)的相關(guān)概念,以及通信協(xié)議等知識(shí),和使用STM32自帶的bxCAN外設(shè)進(jìn)行CAN總線(xiàn)編程實(shí)驗(yàn),以及編程心得。1. CAN總線(xiàn)簡(jiǎn)要介紹概念:CAN是控制器局域網(wǎng)絡(luò)(Controller Area Netwo...
2021-08-19 07:23:37
CAN 總線(xiàn)作為一種現(xiàn)場(chǎng)總線(xiàn),應(yīng)用極為普及。本文給出了一種基于AT89C51 和SJA1000 的CAN 總線(xiàn)節(jié)點(diǎn)設(shè)計(jì)方法,并對(duì)軟硬件進(jìn)行了相應(yīng)的說(shuō)明。關(guān)鍵詞:CAN 總線(xiàn),SJA1000,單片機(jī)CAN(C
2009-05-25 13:26:12 59
59 將CAN 總線(xiàn)網(wǎng)絡(luò)與Ethernet(車(chē)間以太網(wǎng))、Internet 結(jié)合,本文提出了基于CAN 總線(xiàn)的DNC 遠(yuǎn)程診斷及監(jiān)控系 統(tǒng),研究了該系統(tǒng)的體系結(jié)構(gòu)、各部分的功能及相互關(guān)系,并探討了該系統(tǒng)實(shí)
2009-05-26 15:38:203 將CAN 總線(xiàn)網(wǎng)絡(luò)與Ethernet(車(chē)間以太網(wǎng))、Internet 結(jié)合,本文提出了基于CAN 總線(xiàn)的DNC 遠(yuǎn)程診斷及監(jiān)控系統(tǒng),研究了該系統(tǒng)的體系結(jié)構(gòu)、各部分的功能及相互關(guān)系,并探討了該系統(tǒng)實(shí)現(xiàn)
2009-05-26 16:22:1424 本文介紹了一種基于CAN總線(xiàn)的網(wǎng)絡(luò)監(jiān)控系統(tǒng)方案。該方案使用CAN卡和DSP中的CAN模塊作為上下位機(jī)通信接口,研究了CAN通信協(xié)議模型,VC++與CAN卡的通信接口,DSP中CAN模塊通信的數(shù)據(jù)處
2009-06-01 15:32:2227 本文介紹了一種基于CAN 總線(xiàn)的雷達(dá)網(wǎng)絡(luò)測(cè)控系統(tǒng),分析了該CAN 總線(xiàn)局域測(cè)控網(wǎng)絡(luò)的結(jié)構(gòu)和基本原理,給出了系統(tǒng)硬件框圖及軟件流程。基于某型號(hào)雷達(dá)的局域測(cè)控網(wǎng)絡(luò)實(shí)驗(yàn)表明
2009-09-01 09:11:357 由于受CAN收發(fā)器的限制,在一個(gè)CAN總線(xiàn)網(wǎng)絡(luò)中最多只能有110個(gè)CAN節(jié)點(diǎn),或達(dá)到10km的通信距離,所以當(dāng)所需CAN總線(xiàn)網(wǎng)絡(luò)的節(jié)點(diǎn)、距離超出以上限制時(shí),就必須進(jìn)行CAN總線(xiàn)網(wǎng)絡(luò)的擴(kuò)展。
2009-11-26 16:16:1912 針對(duì)傳統(tǒng)車(chē)輛監(jiān)控系統(tǒng)的不足,提出一種基于CAN/GSM的車(chē)輛監(jiān)控管理系統(tǒng)。該系統(tǒng)通過(guò)CAN總線(xiàn)來(lái)獲得有關(guān)車(chē)輛的各種信息,利用GSM網(wǎng)絡(luò)與監(jiān)控中心進(jìn)行通信。通過(guò)動(dòng)態(tài)地設(shè)置監(jiān)控參
2009-12-31 15:06:1415 本文首先簡(jiǎn)要介紹了CAN 總線(xiàn)的技術(shù)特點(diǎn),同時(shí)把針對(duì)電動(dòng)汽車(chē)的特點(diǎn),建立車(chē)身網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)。詳細(xì)的介紹了CAN 通訊協(xié)議準(zhǔn)的拓?fù)浣Y(jié),制定了CAN 總線(xiàn)應(yīng)用層協(xié)議的通訊報(bào)文形式
2010-01-07 14:47:0660
基于CAN總線(xiàn)的分布式電池管理系統(tǒng)
摘要:主要探討了汽車(chē)和電動(dòng)汽車(chē)數(shù)字化技術(shù)、計(jì)算機(jī)控制系統(tǒng)的結(jié)構(gòu)以及現(xiàn)場(chǎng)通
2009-07-15 09:18:191015 
基于DSP的CAN總線(xiàn)接口設(shè)計(jì)
1. CAN總線(xiàn)簡(jiǎn)介
控制器局部網(wǎng)絡(luò)(CAN ControllerAreaNetwork)是德國(guó)Bosch公司從20世紀(jì)80年代初為解決現(xiàn)代汽車(chē)中眾多
2009-10-04 09:41:574265 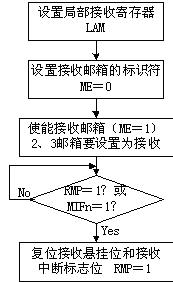
基于無(wú)線(xiàn)傳感器網(wǎng)絡(luò)的CAN總線(xiàn)互聯(lián)
裝甲車(chē)輛狀態(tài)信息采集系統(tǒng)的信息采集單元通常采用CAN總線(xiàn)連接,某些情況下,車(chē)輛上裝和下
2009-12-18 16:36:06612 
can總線(xiàn)在汽車(chē)網(wǎng)絡(luò)中的應(yīng)用雖效率顯著單成本過(guò)高,LIN線(xiàn)恰好彌補(bǔ)這一不足,本文對(duì)比了CAN/LIN總線(xiàn)的性能特點(diǎn),分別闡述了單CAN及單LIN網(wǎng)絡(luò)控制的缺陷,最后混合網(wǎng)絡(luò)控制方案
2011-06-09 17:34:16108 本文要對(duì)CAN總線(xiàn)網(wǎng)絡(luò)應(yīng)用例舉及其拓寬的現(xiàn)場(chǎng)總線(xiàn)控制系統(tǒng)(FCS)作其說(shuō)明
2011-06-22 18:17:521597 
文章對(duì) CAN總線(xiàn) 的技術(shù)特點(diǎn)進(jìn)行了全面介紹,對(duì)CAN總線(xiàn)在磁浮列車(chē)的應(yīng)用方法進(jìn)行了分析,對(duì)CAN總線(xiàn)的軟、硬件進(jìn)行了設(shè)計(jì),最后就磁懸浮列車(chē)CAN總線(xiàn)通訊網(wǎng)進(jìn)行了論述。
2011-07-22 18:05:2046 本文選用can總線(xiàn)設(shè)計(jì)了分布式熱電阻智能節(jié)點(diǎn),利用can總線(xiàn)連接各個(gè)網(wǎng)絡(luò)節(jié)點(diǎn),可以直接與主控卡或上位機(jī)通信,組建成工業(yè)網(wǎng)絡(luò)分布式測(cè)控系統(tǒng)。
2011-09-08 15:19:311813 在分析了RS-485總線(xiàn)與CAN部遲疑不決的異同點(diǎn)后,以PCA82C250型接口電路為例提出了用CAN總線(xiàn)通信物理層接口電路來(lái)替代RS-485總線(xiàn)接口中電路與單片機(jī)直接連接進(jìn)行 通信網(wǎng)絡(luò) 設(shè)計(jì),從而可
2011-09-27 15:40:335678 
設(shè)計(jì)了多個(gè)CAN總線(xiàn)的通信節(jié)點(diǎn),通過(guò)PCI9810-CAN適配卡上的CAN總線(xiàn),組成一個(gè)局域通信網(wǎng)絡(luò),實(shí)現(xiàn)了PC機(jī)對(duì)各個(gè)節(jié)點(diǎn)的監(jiān)控和通信以及節(jié)點(diǎn)間的自由通信。
2011-10-19 14:57:5667 文中分析了CAN總線(xiàn)的發(fā)展和汽車(chē)CAN總線(xiàn)技術(shù)的特征,對(duì)CAN總線(xiàn)在汽車(chē)領(lǐng)域的應(yīng)用進(jìn)行了深入的探討。
2011-12-14 14:58:1084 對(duì)于一般的CAN總線(xiàn)網(wǎng)絡(luò),其網(wǎng)絡(luò)結(jié)構(gòu)圖可以化簡(jiǎn)圖、CAN總線(xiàn)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)圖。
2016-05-03 16:42:4548 CAN 總線(xiàn)是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線(xiàn)之一,它廣泛應(yīng)用于工業(yè)自動(dòng)化監(jiān)控網(wǎng)絡(luò)中。為了靈活使用CAN 總線(xiàn),本文提出了一種新的CAN 總線(xiàn)通訊接口設(shè)計(jì)技術(shù),即使用可重復(fù)編程配置的FPGA 通過(guò)SPI
2016-07-13 17:43:300 一個(gè)CAN通訊口,通過(guò)這些通訊口與各個(gè)CAN節(jié)點(diǎn)進(jìn)行通訊,從而達(dá)到溝通的效果,但是在接收端,會(huì)以局域網(wǎng)的形式進(jìn)行接收,所以期間必須達(dá)成一個(gè)總線(xiàn)網(wǎng)絡(luò)轉(zhuǎn)換,CAN總線(xiàn)網(wǎng)絡(luò)轉(zhuǎn)換成以太網(wǎng),就會(huì)用到CPCI接口CAN卡。
2016-12-29 10:12:532629 基于CAN總線(xiàn)的電動(dòng)汽車(chē)電池管理技術(shù)研究
2017-06-14 16:12:2131 一、CAN總線(xiàn) CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡(jiǎn)稱(chēng),是由以研發(fā)和生產(chǎn)汽車(chē)電子產(chǎn)品著稱(chēng)的德國(guó)BOSCH公司開(kāi)發(fā)的,并最終成為國(guó)際標(biāo)準(zhǔn)(ISO
2017-11-27 09:46:34134673 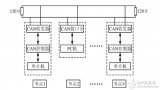
CAN 總線(xiàn)的物理連接只需要兩根線(xiàn),常稱(chēng)為 CAN_H 和 CAN_L,通過(guò)差分信號(hào)進(jìn)行數(shù)據(jù)的傳輸。CAN 總線(xiàn)有兩種電平,分別為 隱性電平 和 顯性電平,這兩種電平有著類(lèi)似漏極 I/O 電平信號(hào)之間“與”的關(guān)系:
2018-07-11 16:31:0012767 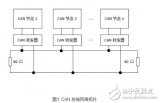
基于保證CAN總線(xiàn)網(wǎng)絡(luò)傳輸數(shù)據(jù)時(shí)可靠性的目的,采用了從包內(nèi)數(shù)據(jù)的可靠性、數(shù)據(jù)包的可靠性傳輸兩方面進(jìn)行驗(yàn)證的方法,通過(guò)多次對(duì)比使用文章設(shè)計(jì)的算法、不使用文章設(shè)計(jì)的算法時(shí)CAN總線(xiàn)網(wǎng)絡(luò)傳輸數(shù)據(jù)的準(zhǔn)確率
2017-12-21 16:19:060 CAN 總線(xiàn)網(wǎng)絡(luò)是一種真正的多主機(jī)網(wǎng)絡(luò),在總線(xiàn)處于空閑狀態(tài)時(shí),任何一個(gè)節(jié)點(diǎn)單元都可以申請(qǐng)成為主機(jī),向總線(xiàn)發(fā)送消息。其原則是:最先訪問(wèn)總線(xiàn)的節(jié)點(diǎn)單元可以獲得總線(xiàn)的控制權(quán);多個(gè)節(jié)點(diǎn)單元同時(shí)嘗試獲取總線(xiàn)的控制權(quán)時(shí),將發(fā)生仲裁事件,具有高優(yōu)先級(jí)的節(jié)點(diǎn)單元將獲得總線(xiàn)控制權(quán)。
2018-03-22 11:13:0743222 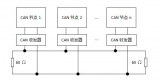
CAN總線(xiàn)局部網(wǎng)絡(luò)管理機(jī)制及實(shí)現(xiàn) 近年來(lái), 汽車(chē) 的節(jié)能問(wèn)題備受關(guān)注,消減不必要的能源損耗是一種非常有效的方法。
2018-04-12 17:32:006504 
前言 CAN總線(xiàn)的應(yīng)用在現(xiàn)在看來(lái)越來(lái)越廣泛,我廠設(shè)備從最初的ARM9與ARM7平臺(tái)、期間升級(jí)過(guò)度到CortexA8與Cortex M3平臺(tái),再到現(xiàn)在的Cortex M4平臺(tái),圍繞CAN進(jìn)行了一系列
2018-06-13 11:16:18332802 屬于軟件協(xié)議。本篇文章先概述一下CAN網(wǎng)絡(luò),讓大家對(duì)CAN總線(xiàn)協(xié)議有一個(gè)全局的概念,再到底層的CAN總線(xiàn)協(xié)議知識(shí)。
2018-10-03 19:53:0073332 
在理解了CAN總線(xiàn)的自通信程序后,再來(lái)探討CAN總線(xiàn)間的相互通信變得容易了許多。對(duì)于是自通信還是相互通信,這個(gè)肯定是需要對(duì)寄存器進(jìn)行必要的設(shè)置 的,分析PIAE的兩個(gè)程序后不難發(fā)現(xiàn),自通信和互通
2018-09-21 15:06:021466 CAN總線(xiàn)用戶(hù)接口簡(jiǎn)單,編程方便。網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)采用總線(xiàn)式結(jié)構(gòu)。這種網(wǎng)絡(luò)結(jié)構(gòu)簡(jiǎn)單、成本低,并且采用無(wú)源抽頭連接,系統(tǒng)可靠性高。通過(guò)CAN總線(xiàn)連接各個(gè)網(wǎng)絡(luò)節(jié)點(diǎn),形成多主機(jī)控制器局域網(wǎng)(CAN)。信息的傳輸采用CAN通信協(xié)議,通過(guò)CAN控制器來(lái)完成。
2018-11-28 17:16:0317438 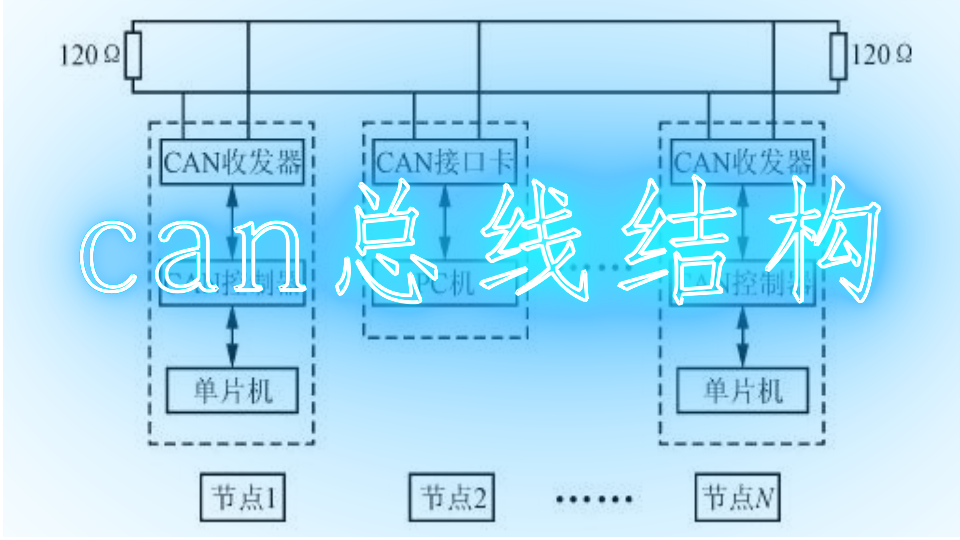
用戶(hù)在使用CAN總線(xiàn)通信時(shí),一般只需要接CAN_H和CAN_L兩根導(dǎo)線(xiàn)。但是導(dǎo)線(xiàn)畢竟都多少有些內(nèi)阻,因此在使用導(dǎo)線(xiàn)傳輸信號(hào)時(shí),肯定會(huì)存在一定的損耗,而CAN總線(xiàn)標(biāo)準(zhǔn)中也大概介紹了在不同波特率下CAN
2018-12-23 10:31:596348 本文提出的CAN總線(xiàn)工程車(chē)輛遠(yuǎn)程監(jiān)測(cè)系統(tǒng),通過(guò)車(chē)載電子控制裝置ECU的CAN總線(xiàn)獲取車(chē)輛運(yùn)行信息,并利用GPRS無(wú)線(xiàn)網(wǎng)絡(luò)通信手段對(duì)車(chē)輛進(jìn)行遠(yuǎn)程監(jiān)控及調(diào)度管理。
2019-10-23 17:14:451564 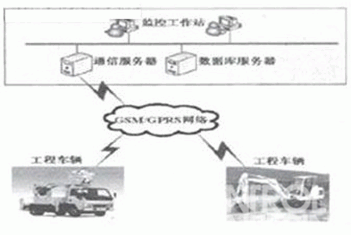
根據(jù)設(shè)計(jì)要求。系統(tǒng)由1個(gè)主控機(jī)和N個(gè)CAN節(jié)點(diǎn)執(zhí)行機(jī)組成,它們都掛接在雙絞線(xiàn)上,組成一個(gè)CAN總線(xiàn)通信局部通信網(wǎng)絡(luò),CAN總線(xiàn)通信網(wǎng)絡(luò)中的主控機(jī)安裝無(wú)線(xiàn)數(shù)據(jù)收發(fā)器nRF2401。
2020-03-03 11:30:001138 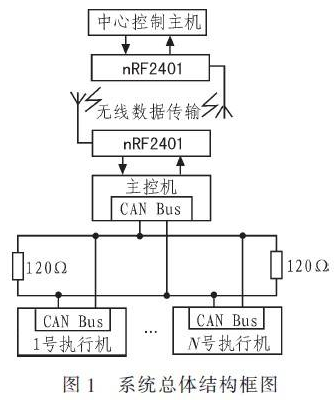
can總線(xiàn)模塊是一個(gè)比較模糊的概念,但凡是和CAN總線(xiàn)沾邊,應(yīng)用CAN總線(xiàn)進(jìn)行通訊的設(shè)備,我們其實(shí)都可以稱(chēng)其為CAN總線(xiàn)模塊。
2020-09-18 11:26:544694 出面向汽車(chē)的CAN通信協(xié)議,后來(lái),CAN總線(xiàn)通過(guò)ISO11898和ISO11595進(jìn)行了標(biāo)準(zhǔn)化,現(xiàn)在在歐洲是汽車(chē)網(wǎng)絡(luò)的標(biāo)準(zhǔn)協(xié)議。
2020-12-04 10:16:4528480 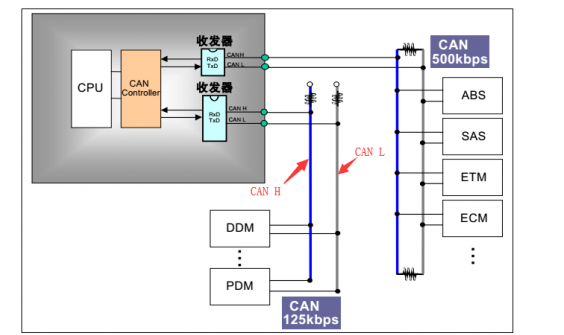
LT3960: I 2 C to CAN-Physical Transceiver Data Sheet
2021-01-29 10:39:136 結(jié)合汽車(chē)技術(shù)發(fā)展對(duì)傳統(tǒng)布線(xiàn)方法中存在的問(wèn)題和CAN總線(xiàn)系統(tǒng)的使用進(jìn)行了介紹,總結(jié)了CAN總線(xiàn)系統(tǒng)的優(yōu)點(diǎn)。
2021-04-19 17:31:3033 在現(xiàn)場(chǎng)總線(xiàn)概念的出現(xiàn)到現(xiàn)在的近20年時(shí)間里,已經(jīng)出現(xiàn)了好幾種現(xiàn)場(chǎng)總線(xiàn)技術(shù)并走向成熟。其中CAN總線(xiàn)已被公認(rèn)為幾種最有前途的現(xiàn)場(chǎng)總線(xiàn)之一。CAN是一種由帶有CAN控制器組成的高性能串行數(shù)據(jù)局域通信網(wǎng)絡(luò),是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線(xiàn)之一。
2021-04-20 15:55:3023 CAN總線(xiàn)是什么意思 CAN的全稱(chēng)是Controller Area Network,中文名稱(chēng)是控制器局域網(wǎng)絡(luò),是由德國(guó)BOSCH公司開(kāi)發(fā)的,并且最后成為國(guó)際標(biāo)準(zhǔn),這是目前應(yīng)用最多的現(xiàn)場(chǎng)總線(xiàn)之一。現(xiàn)場(chǎng)
2021-08-07 16:37:1317486 (OSI參考模型介紹)是肯定的,我們可以看一下相關(guān)的文檔可知:CAN遵從OSI模型。 上面這一點(diǎn)大部分人都是熟知的。 第二、CAN總線(xiàn)分為哪幾層 根據(jù)《FPGA和USB3.0通信-USB3.0協(xié)議介紹》中總線(xiàn)、協(xié)議、接口關(guān)系可知: CAN總線(xiàn)內(nèi)容整體比較簡(jiǎn)單(相對(duì)),肯定沒(méi)有USB、PCIe協(xié)
2021-11-18 16:35:555375 
很多的司機(jī)朋友以及工控圈的朋友都有聽(tīng)到過(guò)“CAN總線(xiàn)”一詞,今天我們就來(lái)一起看一下CAN總線(xiàn)為什么這么火? CAN總線(xiàn),也叫做控制器局域網(wǎng)總線(xiàn)(Controller Area Network
2022-01-15 17:04:485782 本資料是面向CAN總線(xiàn)初學(xué)者的CAN入門(mén)書(shū)。對(duì)CAN是什么、CAN的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、CAN的概要及CAN的協(xié)議進(jìn)行了說(shuō)明。
2022-04-02 16:35:3223 AUTOSAR_SWS_CANNetworkManagement
AUTOSAR CAN網(wǎng)絡(luò)管理協(xié)議,4.4.0版本
2022-08-01 11:09:4114 隨著汽車(chē)智能化、網(wǎng)聯(lián)化的高速發(fā)展,對(duì)于汽車(chē)通訊網(wǎng)絡(luò)的安全威脅越來(lái)越多,而CAN總線(xiàn)是目前汽車(chē)使用最廣泛的總線(xiàn)之一,因此對(duì)汽車(chē)CAN總線(xiàn)網(wǎng)絡(luò)安全威脅進(jìn)行滲透測(cè)試、挖掘潛在漏洞至關(guān)重要。
2022-11-09 13:53:381947 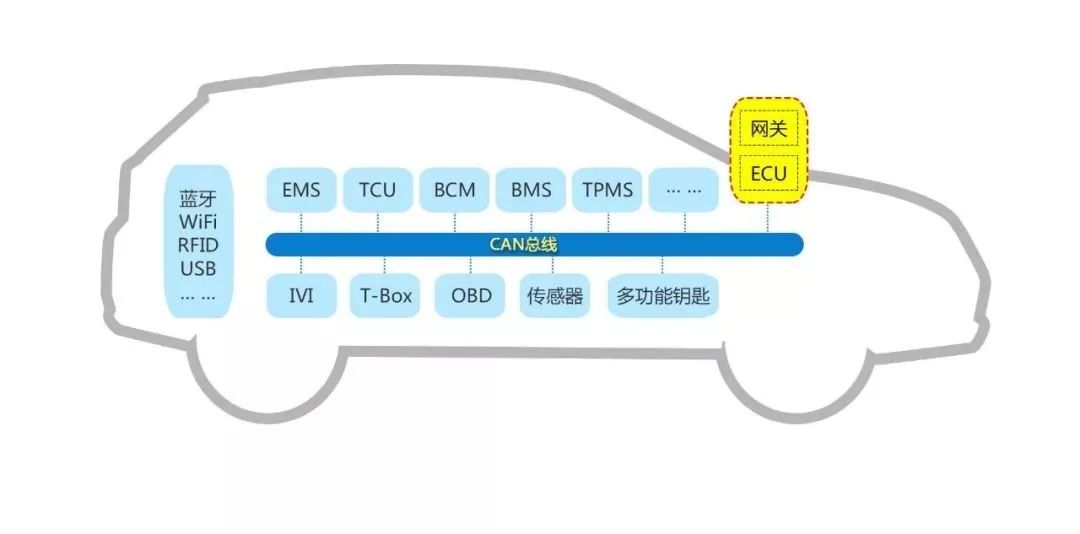
節(jié)點(diǎn)錯(cuò)誤狀態(tài),并通過(guò)實(shí)際的應(yīng)用測(cè)試生成并記錄CAN錯(cuò)誤。什么是CAN總線(xiàn)錯(cuò)誤?控制器局域網(wǎng)絡(luò)(ControllerAreaNetwork,CAN)是當(dāng)今汽車(chē)和工業(yè)自
2022-05-27 10:39:213329 
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線(xiàn)的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線(xiàn)和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此遠(yuǎn)創(chuàng)智控YC-ECT-CAN
2023-07-06 09:55:58514 
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線(xiàn)的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線(xiàn)和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此捷米JM-ECT-CAN
2023-07-31 09:07:29349 
由于好多現(xiàn)場(chǎng)會(huì)出現(xiàn)將CAN總線(xiàn)的設(shè)備接到EtherCAT網(wǎng)絡(luò)中,由于協(xié)議的不相同,不能直接進(jìn)行連接,現(xiàn)需一種能同時(shí)兼容CAN 總線(xiàn)和ETHERCAT網(wǎng)絡(luò)的一種設(shè)備,由此捷米JM-ECT-CAN
2023-10-31 18:30:00437 
CAN總線(xiàn)的應(yīng)用越來(lái)越廣泛,工程師在各種不同工況下,如何選擇最合適的網(wǎng)絡(luò)拓?fù)浞绞侥兀勘酒恼聦⒔榻B主流的幾種總線(xiàn)拓?fù)浞绞剑约叭绾谓鉀QCAN總線(xiàn)故障。
2023-08-28 14:57:58234 can總線(xiàn)負(fù)載率多少合理? CAN總線(xiàn)是一種控制器區(qū)域網(wǎng)絡(luò),它是用于在不同設(shè)備之間進(jìn)行通信的技術(shù)。CAN總線(xiàn)的應(yīng)用領(lǐng)域廣泛,例如汽車(chē)、航空航天、醫(yī)學(xué)儀器等。在CAN總線(xiàn)中,數(shù)據(jù)通過(guò)網(wǎng)絡(luò)傳輸,并且在
2023-09-07 15:05:412173 can總線(xiàn)負(fù)載率怎么計(jì)算? CAN總線(xiàn)是指控制器局域網(wǎng),是一種實(shí)時(shí)性能極高的網(wǎng)絡(luò)協(xié)議,廣泛應(yīng)用于汽車(chē)、工業(yè)控制、醫(yī)療儀器等領(lǐng)域。在CAN總線(xiàn)網(wǎng)絡(luò)設(shè)計(jì)中,總線(xiàn)負(fù)載率是一個(gè)非常重要的指標(biāo),它能夠幫助
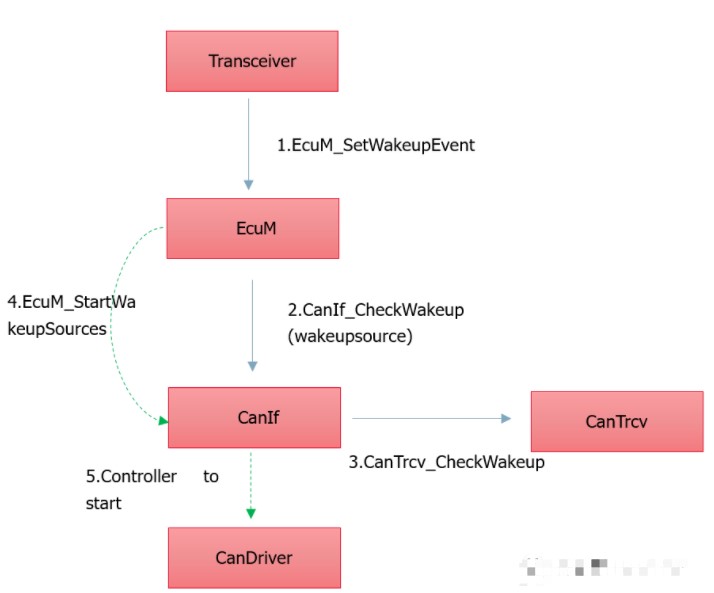
2023-09-07 15:05:452584 AUTOSAR CAN 網(wǎng)絡(luò)管理是一個(gè)獨(dú)立于硬件的協(xié)議,只能在 CAN 上使用。它的主要目的是協(xié)調(diào)網(wǎng)絡(luò)的正常運(yùn)行和總線(xiàn)休眠模式之間的轉(zhuǎn)換。
2023-09-09 10:32:202135 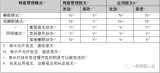
CAN總線(xiàn) CAN是控制器局域網(wǎng)絡(luò)的簡(jiǎn)稱(chēng),是一種能夠?qū)崿F(xiàn)分布式實(shí)時(shí)控制的串行通信網(wǎng)絡(luò)。CAN總線(xiàn)的功能復(fù)雜且智能。 CAN總線(xiàn)網(wǎng)絡(luò)主要掛在CAN_H和CAN_L,各個(gè)節(jié)點(diǎn)通過(guò)這兩條線(xiàn)實(shí)現(xiàn)信號(hào)的串行
2023-11-09 18:11:50657 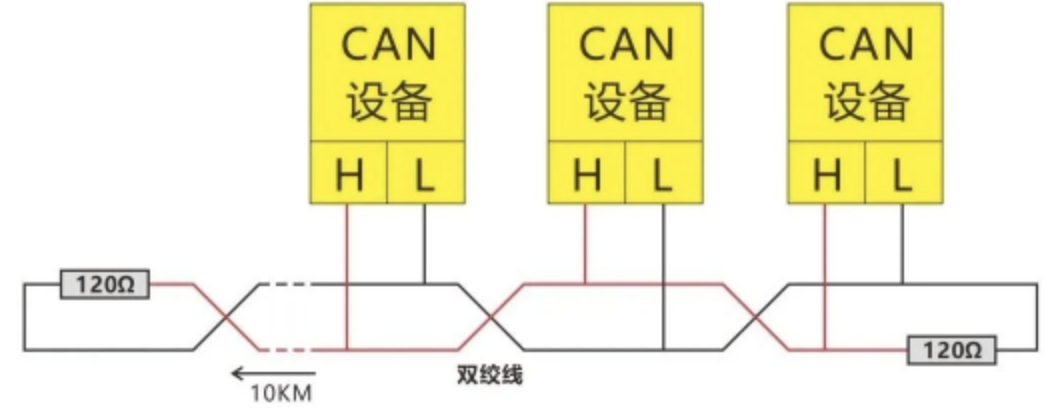
、高速性和優(yōu)秀的網(wǎng)絡(luò)管理能力。 在CAN總線(xiàn)中,數(shù)據(jù)通過(guò)兩根線(xiàn)進(jìn)行傳輸,即CAN-H線(xiàn)和CAN-L線(xiàn)。CAN-H線(xiàn)為高電平,CAN-L線(xiàn)為低電平。這兩根線(xiàn)同時(shí)傳輸數(shù)據(jù),其中高優(yōu)先級(jí)的消息可以覆蓋低優(yōu)先級(jí)的消息。這種雙線(xiàn)傳輸?shù)臋C(jī)制使得CAN總線(xiàn)能夠同時(shí)傳輸多個(gè)
2023-12-07 18:09:401216 CAN總線(xiàn)共模電感是應(yīng)用于CAN總線(xiàn)通信中的一種電子元件,用于解決CAN總線(xiàn)通信中的共模干擾問(wèn)題。本文將詳細(xì)介紹CAN總線(xiàn)共模電感的定義、作用、選型要點(diǎn)以及常見(jiàn)注意事項(xiàng),并且結(jié)合實(shí)際案例進(jìn)行分析
2024-01-05 13:42:34748 高速CAN總線(xiàn)和低速CAN總線(xiàn)的特性 高速CAN總線(xiàn)和低速CAN總線(xiàn)是兩種常見(jiàn)的CAN總線(xiàn)類(lèi)型。它們?cè)跀?shù)據(jù)傳輸速率、最大電纜長(zhǎng)度、適用場(chǎng)景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:01497
 電子發(fā)燒友App
電子發(fā)燒友App













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論