溫度遙控遙測是遠程實現(xiàn)對溫度的測量與控制,特別適合那些環(huán)境惡劣,測量人員不容易接近的場合。根據(jù)遙控遙測系統(tǒng)的特點,提出了C8051F040單片機對水溫遙控遙測的設計方案。
2011-11-03 16:21:33 2403
2403 
針對某型航行器自沉系統(tǒng)中,需要掌握某合金材料在海水中因不同溫度條件下的受腐蝕時間長短。采用模塊化硬件設計,使用浸水傳感器為檢測單元、時鐘芯片DS12887為計時模塊;以C8051F040為微處理器
2018-02-09 03:22:001856 
的TN87C196CA和TN87C196CB以及Silicon Laboratories公司的C8051F040等。這里以C8051F040為例詳細介紹其內(nèi)部CAN控制器的使用方法及其在分布式電源系統(tǒng)中的應用。
2011-03-03 14:15:52
C8051F040核心板資料包V2
2013-08-20 10:52:45
C8051F41x器件是完全集成的低功耗混合信號片上系統(tǒng)型MCU,具有片內(nèi)上電復位、VDD監(jiān)視器、看門狗定時器和時鐘振蕩器的C8051F41x器件是真正能獨立工作的片上系統(tǒng)。FLASH存儲器還具
2018-03-12 15:16:42
作為新型的SOC片上型混合信號單片機,C8051F系列產(chǎn)品已經(jīng)被廣泛應用到了智能控制儀表,嵌入式設備,消費電子等領域。提出了一種利用C8051F單片機內(nèi)部可在線編程的FLASH存儲器來設計IAP系統(tǒng)
2011-03-04 11:31:07
016、C8051F017、C8051F018、C8051F019、C8051F020、C8051F021、C8051F022、C8051F023、C8051F040、C8051F041、C8051F
2022-03-29 15:25:10
請教,c8051f040在proteus仿真軟件中的元件庫是哪個?可以找到嗎?元件名是什么?急求!!謝謝
2011-04-26 01:25:06
`第一次接收數(shù)據(jù)讀取數(shù)據(jù)是正常的,第二次接收數(shù)據(jù)不會變還是原來的數(shù)據(jù),但是會改變讀取的數(shù)據(jù),最后會在進一次中斷把原來的數(shù)據(jù)重新讀取,所以數(shù)據(jù)還是原來的數(shù)據(jù),這是為什么?`
2019-11-09 09:15:28
這是c8051f040模式3串口通信的從機程序
2012-12-29 00:29:05
本帖最后由 eehome 于 2013-1-5 09:48 編輯
c8051f040可以產(chǎn)生8位或者16位PWM ,這里僅介紹了8位的,讀者可參考編寫16位的
2012-12-22 21:15:31
這是c8051f040模式1全雙工通信,本程序編寫是單片機與其自己通信
2012-12-29 00:31:30
這個單片機寫的相關(guān)程序可以用什么軟件編譯調(diào)試比較好,我用keil uvision4編譯過,但是不能debug,請問,有誰知道為什么嗎?怎么解決這個問題,或者推薦使用其他軟件編譯調(diào)試,不知道ise行不行?
2011-04-26 01:27:58
測試板子,但是在proteus7.9中找不到c8051f340芯片,哪位大神請賜教如何proteus加入c8051f340芯片 !!在線急等!!
2014-01-26 11:20:40
最近得手一款c8051f340最小系統(tǒng)版,但不知怎么下載,急求哪位高手、好心人給發(fā)一份c8051f340驅(qū)動。。。{:4_107:}郵箱906550204@qq.com
2013-12-26 21:03:56
(1)高速流水線結(jié)構(gòu)的8051兼容的CIP-51內(nèi)核,最高25MIPS執(zhí)行速度;(2)全速非侵入式的系統(tǒng)調(diào)試接口(片內(nèi),JTAG接口);(3)真正12 位C8051F040 100 ksps 的13
2011-07-13 10:45:34
本帖最后由 長腿的叔叔 于 2017-5-7 22:17 編輯
c8051f040的看門狗這么設置對嗎?p1口接按鍵,p4口接1602控制端,p5接1602數(shù)據(jù)端,p7接ADXL345傳感器(數(shù)字輸出)
2017-05-07 22:16:14
我想請教一下,誰知道c8051f系列的單片機所在的protel元件庫和元件名是什么?主要是c8051f040這款的!!希望得到幫助,急求!!O(∩_∩)O謝謝
2011-04-26 01:22:36
BOARD PROTOTYPING W/C8051F040
2023-03-30 11:48:34
我用新買的開關(guān)電源給單片機供電時,用JTAG往c8051f040下程序老是失敗,換以前的開關(guān)電源則沒事,用數(shù)字示波器檢測紋波也不大,100mv以內(nèi),還有我用測試代碼測試新開關(guān)電源供電時的單片機,單片機運行時沒有復位,很奇怪,望高手解答
2019-10-28 07:44:53
在校生,做過51單片機RLC測量,用過c8051f040做項目開發(fā);現(xiàn)階段正在學習應用stm32f407開發(fā)板,課題與多機通信、單片機控制、實時操作系統(tǒng)等相關(guān)(正在學習掌握……)。前段時間關(guān)注
2017-04-13 21:13:35
、充分利用步進電機優(yōu)點的脈沖控制以及以節(jié)省自身系統(tǒng)能源的間歇式工作模式等一并加以實現(xiàn),在保證系統(tǒng)的持續(xù)正常運轉(zhuǎn)過程,減少誤差和問題發(fā)生, 根據(jù)計算太陽高度角和方位角來跟蹤太陽,并按照一定時間間隔產(chǎn)生
2015-12-16 12:58:48
基于現(xiàn)有對太陽能中天文參數(shù)的研究基礎上,對太陽的高度和方位角的計算技術(shù)已經(jīng)非常成熟。因此,該部分程序是在研究太陽能利用所涉及到的日地距離、積日、太陽赤緯角、太陽時角、時差、年度訂正、經(jīng)度訂正、時刻
2016-01-03 22:18:35
系統(tǒng)采用了視日運動軌跡跟蹤方式進行太陽跟蹤,因此主程序主要完成實時太陽高度角和方位角的計算,并設計相應控制策略,按要求發(fā)出脈沖信號,驅(qū)動步進電機完成角度的轉(zhuǎn)動。主程序涉及的兩個主要的子程序,其中
2016-01-03 22:15:16
差值產(chǎn)生脈沖數(shù);下午 6 點高度角根據(jù)條件電機反轉(zhuǎn)至初始位置;方位角電機同理。 到這里就完成了 CCS 設計平臺上對系統(tǒng)的主程序模塊、太陽角度計算模塊、步進電機脈沖控制模塊以及其他相關(guān)功能模塊的軟件
2016-01-23 21:20:04
這是c8051f040單片的模式3通信
2012-12-29 00:27:39
用的C8051F040 用到TIM3定時器的只有串口0,但是不進串口0中斷,一直進TIM3中斷。程序沒問題,在其他板子上試過。是芯片壞了嗎
2019-06-17 04:13:52
全國衛(wèi)星天線仰角、方位角、極化角計算軟件軟件版
2009-10-23 15:08:47
c8051f040單片機,如果使用內(nèi)部基準電壓,它的基準電壓引腳怎么連接,如果使用外部基準電壓,又怎么連接呢?
2011-04-26 01:30:35
摘 要:為實現(xiàn)公交車的自動報站功能,提出一種以C8051F040單片機和GPS衛(wèi)星定位系統(tǒng)的設計方案.首先設置通過錄音接口預存各站點具體位置的語音信息,當公交車在行駛時,能自動識別站點并完成
2018-09-26 14:25:25
網(wǎng)上沒有找到,用了一天時間自己推導的方位角仰角計算公式,初步驗證正確公式推導高中的數(shù)學知識就夠了,但沒有做出合適輔助線面,過程比較繁瑣
2020-06-01 20:07:20
最近在研究天文方面的東西,找到了個小軟件,可以計算太陽的方位角寄高低角,共享給大家。
2017-04-18 18:57:05
設計硬件火控機電路電源電壓進行監(jiān)視,分別是26V和5V電壓。當電壓出現(xiàn)瞬間的高壓或低壓脈沖干擾系統(tǒng)正常工作的時候,記錄異常電壓的時間和脈沖電壓值,要求采樣時間為5ms一次,單片機晶振頻率為
2013-05-24 15:33:03
基于虛擬儀器的城市景觀照明分布式控制系統(tǒng)設計與實現(xiàn)針對城市級景觀照明系統(tǒng)分布廣,數(shù)量多的特點,設計一種基于虛擬儀器的可組分布式城市景觀照明控制系統(tǒng)。采用C8051F040 處理器構(gòu)建多通道照明控制
2009-12-01 10:19:03
天線下傾角和方位角的調(diào)整是網(wǎng)絡優(yōu)化中的一個非常重要的事情。根據(jù)理想的蜂窩移動通信模型,一個小區(qū)的交界處,這樣信號相對互補。與此相對應,在現(xiàn)行的GSM系統(tǒng)(主要指ERICSSON設備)中,定向站一般被
2019-06-12 06:45:14
針對某型航行器自沉系統(tǒng)中,需要掌握某合金材料在海水中因不同溫度條件下的受腐蝕時間長短。采用模塊化硬件設計,使用浸水傳感器為檢測單元、時鐘芯片DS12887為計時模塊;以C8051F040為微處理器
2020-04-21 08:06:34
采用新華龍C8051F040芯片做單片機系統(tǒng),擴展DAC7568芯片,系統(tǒng)中共需要三對收發(fā)串口(TX RX),但是C8051F040芯片只有兩對串口,請問如何用軟件模擬出第三對TX RX串口?
2016-01-20 22:13:33
微處理器C8051F040資料下載內(nèi)容包括:C8051F040主要功能和參數(shù)C8051F040引腳功能C8051F040內(nèi)部方框圖C8051F040電氣參數(shù)
2021-03-23 07:32:58
本文以Silicon Laboratories公司的C8051F040單片機為核心,通過擴展GPS、GPRS、RFID等模塊,在實現(xiàn)車輛GPS遠程監(jiān)控的基礎上,實現(xiàn)了車輛所運輸貨物信息的實時傳輸,有助于真正實現(xiàn)物流系統(tǒng)的全程監(jiān)控。
2021-05-18 06:30:59
有兩部分程序急求幫助,價錢可商量。1、C8051F040單片機與傳感器(輸出485信號)之間的485總線通訊及數(shù)據(jù)傳送。2、C8051F040單片機與DAC7568芯片之間的SPI總線通訊與數(shù)據(jù)轉(zhuǎn)換程序。有意請加Q 617677193
2016-02-25 21:21:24
最近在看毫米波雷達的東西,發(fā)現(xiàn)所有的介紹都是計算相對速度與距離,對于目標的方位角計算找了很久都沒有找到,有知道的普及一下,謝謝~~~~~
2016-11-23 20:25:29
請大神幫助!!!,需要編寫一個C語言程序,可以實現(xiàn)從六個電流互感器上取到相應的值,通過串口發(fā)給電腦,同時通過一個38譯碼器反應到6個LED燈上(這里直接給譯碼器數(shù)就行),表示這路有電流。電流互感器分別是P3.0-P3.4和P3.6 .38譯碼器的ABC分別是 P5.2-P5.4。
2015-08-05 15:11:14
設計硬件電路電源電壓進行監(jiān)視,分別是26V和5V電壓。當電壓出現(xiàn)瞬間的高壓或低壓脈沖干擾系統(tǒng)正常工作的時候,記錄異常電壓的時間和脈沖電壓值,要求采樣時間為5ms一次,單片機晶振頻率為
2013-05-22 20:33:47
電動汽車電池智能快速充電器的設計本文介紹了一種電動汽車智能快速充電器的設計過程。該充電器基于Cygnal 公司的C8051F040單片機為控制核心,將C8051F040 特有的模擬電路模塊、高精度A
2009-05-17 11:39:32
如何換算出方位角
2023-10-24 06:38:49
>= 20){count = 0;P6 = ~P6;}ET1 = 1;}上述是我C8051F040單片機定時器50MS程序現(xiàn)在問題的定時器并沒有生產(chǎn)50MS的定時,簡單來說就是定時器并沒有工作,求個位大神給予幫助希望能指出相關(guān)問題 并給出作答
2017-03-12 22:54:22
誰能解釋下游動方位角,麻煩能不能給解釋下
2019-07-29 04:36:00
項目主要在于算出飛機相對于基塔的方位角,而該方位角是由飛機上兩天線(環(huán)形天線和垂直天線)接收的無線電信號來確定的。這里涉及到無線電信號的調(diào)制,AD轉(zhuǎn)換,F(xiàn)PGA對方位角的解調(diào),DA轉(zhuǎn)換,顯示等過
2016-06-10 14:11:30
C8051F04x 系列器件是完全集成的混合信號片上系統(tǒng)型MCU,具有64 個數(shù)字I/O 引腳(C8051F040/2/4/6)或32 個數(shù)字I/O 引腳(C8051F041/3/5/7),片內(nèi)集成了一個CAN2.0B 控制器。下面列出了一
2008-07-19 22:29:56 263
263 模擬外設− SAR ADC 12 位(C8051F040/1) 10 位(C8051F042/3/4/5/6/7) ±1LSB
2008-07-19 22:30:583 C8051F040/1/2/3/4/5/6/7混合信號ISP FLASH 微控制器數(shù) 據(jù) 手 冊
C8051F04x 系列器件是完全集成的混合信號片上系統(tǒng)型MCU,具有64 個數(shù)字I/O 引腳(C8051F040/2/4/6)或32 個數(shù)字I/O
2008-07-20 22:05:39151 [摘要]:本文介紹了一種電動汽車智能快速充電器的設計過程。該充電器基于Cygnal 公司的C8051F040單片機為控制核心,將C8051F040 特有的模擬電路模塊、高精度A/D 轉(zhuǎn)換、I2C 總線接口
2009-05-16 18:53:23165 CAN總線具有配置靈活、應用范圍廣的特點,C8051f040單片機功能強大,集成了CAN總線控制器。本文提出了一種基于C8051f040的CAN總線系統(tǒng)智能節(jié)點的設計方案,給出了相應的硬件和軟件
2009-06-17 11:18:4723 介紹了C8051F040 內(nèi)部集成的CAN 控制器的結(jié)構(gòu),重點分析了CAN 控制器可能有的沖突及相應硬件軟件的解決方案,在此基礎上給出了以此MCU 為核心的CAN 總線節(jié)點的硬件原理圖,并介
2009-08-18 10:44:2726 摘要:CAN(ControllerAreaNetwork)總線是一種使用CAN協(xié)議的串行通信網(wǎng)絡。SiliconLaboratories公司的單片機C8051F040是完全集成的混合信號系統(tǒng)級芯片,而且內(nèi)部集成了CAN控制器。文中對該芯片
2010-06-28 14:25:1541 基于改善電梯檢測現(xiàn)狀和電梯檢測的高可靠性的考慮,設計了一套基于CAN總線的電梯曳引及制動性能檢測系統(tǒng)。本文著重闡述了檢測系統(tǒng)的CAN節(jié)點里比較有代表性的、利用C8051F040單片
2010-07-29 14:59:4015 提出一種基于C8051F040的炮塔方位角測試系統(tǒng)的設計方案,給出測試系統(tǒng)的各個模塊軟硬件設計。炮塔方位角測試系統(tǒng)集數(shù)據(jù)采集,數(shù)據(jù)傳輸和數(shù)據(jù)顯示等功能于一體,實現(xiàn)了炮塔方
2010-12-24 16:21:2434 摘要:CYGNAL生產(chǎn)的單片機C8051F040是代表8位單片機發(fā)展方向的高速(25M)混合信號系統(tǒng)級芯片(SOC)它不僅集成了一般測控系統(tǒng)需要的外設,而且集成了很有發(fā)展前
2006-03-11 11:48:381831 
陀螺方位角陀螺方位角[tuó luó fāng wèi jiǎo] 陀螺方位角英文 gyroscopic azimuth從陀螺子午線北端,順時針至某方向線的水平夾角。
2009-05-04 19:53:091893 基于C8051F040的特種車輛電源監(jiān)控系統(tǒng)設計
0 引言 汽車在行駛過程中,擁有一個穩(wěn)定的電源系統(tǒng),是汽車各個電子器件正常工作最基本的保障。當電源部
2009-11-03 15:46:59795 基于C8051F040的模型車無線控制系統(tǒng)的設計
0 引 言 汽車耐久性試驗是汽車試驗的重要組成部分,而在試驗過程中試驗人員駕駛行為的變化,往往導致實
2009-11-10 10:47:10964 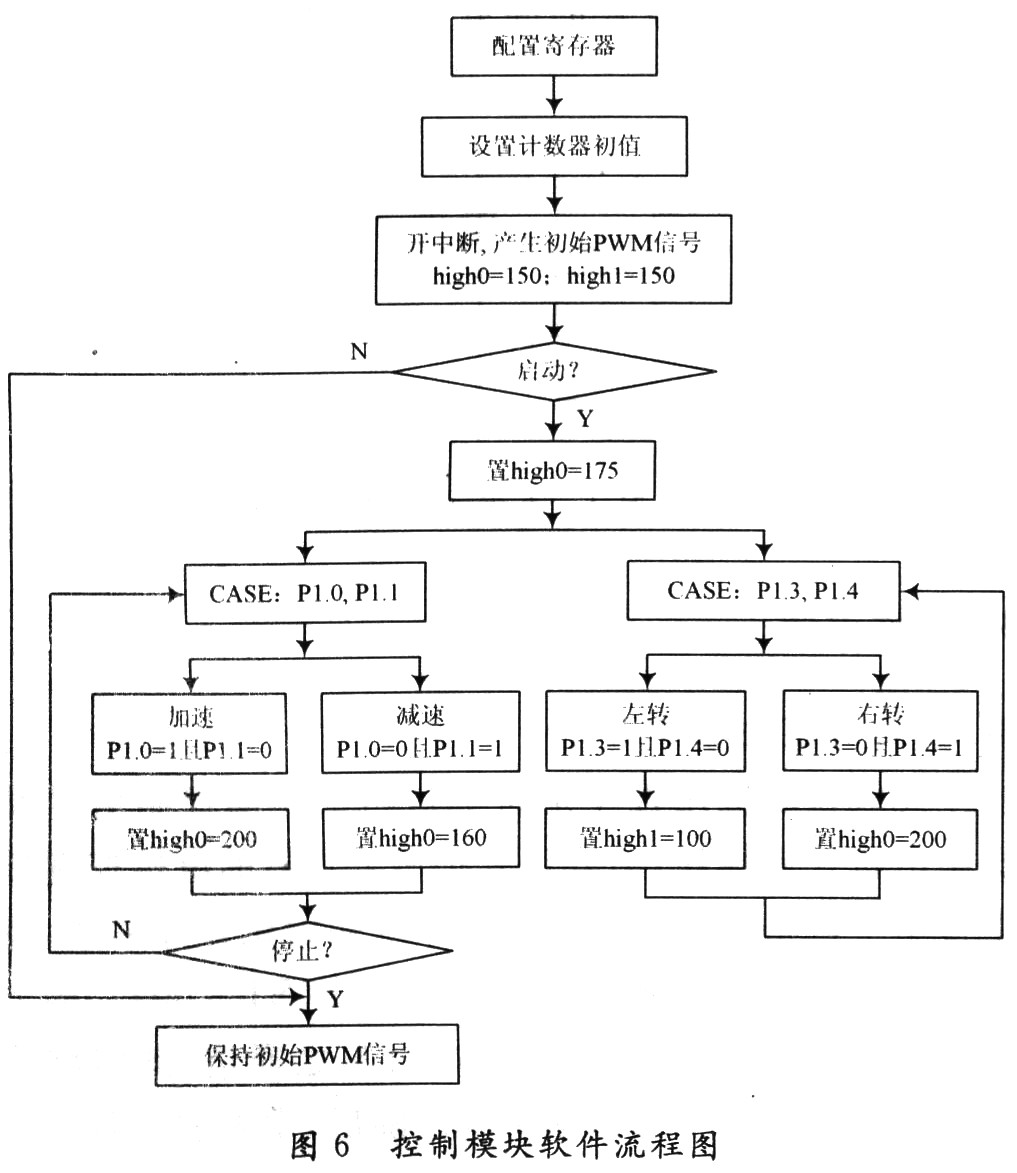
基于聲納傳感器和C8051F040的測距系統(tǒng)設計
超聲波測距具有迅速、方便、且計算簡單,測量精度高等諸多特點,因此在倒車雷達、測距儀、移動機器人和農(nóng)產(chǎn)品無損檢
2009-11-18 10:17:241817 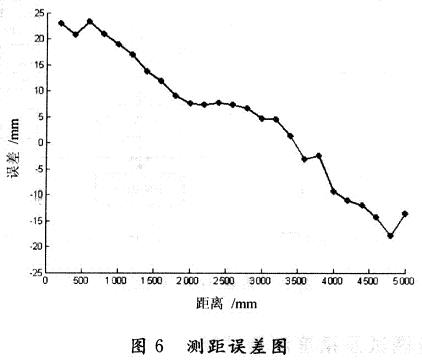
隨著現(xiàn)代計算機與數(shù)字技術(shù)的發(fā)展.這種顯示方式已不適合時代發(fā)展的要求。為了實現(xiàn)對雷達探測目標的錄取、綜合、相關(guān)及顯示,為了實現(xiàn)設備的小型化,需要將天線的方位角變
2010-07-13 12:00:191071 
以太網(wǎng)和CAN總線應用廣泛,但由于其通信協(xié)議不同,兩種總線器件間無法進行數(shù)據(jù)通信,因此,設計了基于CP2200與C8051F040的以太網(wǎng)總線與CAN總線接口轉(zhuǎn)換電路,并給出部分相關(guān)硬件電路與軟件設計分析。在保證數(shù)據(jù)完整和協(xié)議可靠的前提下,通過握手協(xié)議和簡化的
2011-01-15 16:21:2267 磁阻傳感器為建立羅盤導航系統(tǒng)提供了固態(tài)有效的解決辦法!但是我們怎么才能夠從簡單的3 軸數(shù)據(jù)得到羅盤的方位角呢?下面就將一步步告訴你如何去實現(xiàn)!
2012-04-28 15:23:46267 文中采用高精度AD芯片AD7891與C8051F040單片機組成高速數(shù)據(jù)采集系統(tǒng),通過SPI總線,將AD7891與C8051F040直接連接,方便的實現(xiàn)了8路模擬量的高速采集和傳輸,并給出了SPI總線的接口電路及軟
2012-12-17 11:00:3899 摘要:現(xiàn)場總線已成為數(shù)據(jù)總線領域中最為活躍的熱點,CAN 總線被公認為最有前途的現(xiàn)場總線之一,CAN 總線節(jié)點的設計、調(diào)試是CAN 總線通訊系統(tǒng)設計的重點。在此介紹了C8051F040單片機
2013-03-06 15:24:4571 文中以C8051F040為核心,利用CAN總線設計了應用于糧庫溫濕度數(shù)據(jù)測量采集系統(tǒng)。該系統(tǒng)利用CAN總線的特點和性能優(yōu)勢,結(jié)合現(xiàn)在大型糧庫溫度測量系統(tǒng)的現(xiàn)狀,給出了溫度測量系統(tǒng)的總體結(jié)構(gòu)設計、硬件
2015-12-28 09:57:2915 基于C8051F040的納秒鈥激光觸摸屏控制系統(tǒng)_陳瑞濤
2017-03-19 11:33:112 基于 C8051F040 的嵌入式 PLC 芯片組 嵌入式 PLC 芯片組采用四層印制板設計,主要由 CPU,外部 RAM,看門狗和以及供掉電保護的電池組成。CPU 選用高性能的 C8051F040
2017-11-20 15:49:3631 基于C8051F040單片機的CAN總線通信硬件部分 硬件部分電路結(jié)構(gòu)如下: CAN收發(fā)模塊原本采用的是ATA6660高速CAN收發(fā)芯片,電路連接如下: 設計電路為:當單片機發(fā)送數(shù)據(jù)時,D18閃爍
2017-11-24 05:11:011056 自制仰角方位角測試儀,Elevation Azimuth Tester
關(guān)鍵字:仰角測試儀,方位角測試儀制作
自制仰角方位角測試
2018-09-20 19:22:161449 C8051F040中的CAN寄存器分成3類: CAN控制器協(xié)議寄存器,消息對象接口寄存器,消息處理器寄存器。對于控制CAN主要功能的最重要的3個寄存器可以像單獨的特殊功能寄存器( SFRs)一樣采用
2018-12-27 16:55:522134 
C8051F04x 系列器件是完全集成的混合信號片上系統(tǒng)型 MCU,具有 64 個數(shù)字 I/O 引腳(C8051F040/2/4/6)或 32 個數(shù)字 I/O 引腳(C8051F041/3/5/7),片內(nèi)集成了一個 CAN2.0B 控制器。下面列出了一些主要特性。
2019-01-16 08:00:0015 針對汽車雷達方位角分辨率受方位向天線長度限制的問題, 該文提出一種基于多波束實孔徑雷達圖像融合來提升汽車雷達方位角分辨率的成像方法。該方法首先利用相控陣天線波束電掃描來獲取前視實孔徑雷達圖像, 然后
2020-11-27 03:40:0027 根據(jù)汽車雷達成像幾何關(guān)系通過多張多角度實孔徑雷達圖像相參累加來提升雷達方位角分辨率。計算機仿真結(jié)果驗證了該方法在提升汽車雷達方位角分辨率的有效性。無人駕駛技術(shù)通過車載傳感系統(tǒng)感知道路環(huán)境, 自動控制車輛的轉(zhuǎn)向
2020-11-30 03:55:0041 電子發(fā)燒友網(wǎng)為你提供CP2102與C8051F040的USB-CAN轉(zhuǎn)換器設計資料下載的電子資料下載,更有其他相關(guān)的電路圖、源代碼、課件教程、中文資料、英文資料、參考設計、用戶指南、解決方案等資料,希望可以幫助到廣大的電子工程師們。
2021-04-10 08:51:474 今天咱們繼續(xù)回到好久沒講了的4D 雷達,接著上次那篇(4D 雷達天線布局思考-俯仰角篇),這回聊聊方位角(Azimuth)。 之前提過,評估一個量可以從分辨率(resolution),精度
2021-06-17 15:24:112452 基于C8051F040單片機的便攜式心電監(jiān)護儀的低功耗設計方法。
2021-06-24 17:01:3017 電子發(fā)燒友網(wǎng)站提供《基于C8051F040的以太網(wǎng)-CAN轉(zhuǎn)換電路設計.pdf》資料免費下載
2023-10-18 10:59:300 電子發(fā)燒友網(wǎng)站提供《基于C8051F040的以太網(wǎng)-CAN轉(zhuǎn)換電路設計.pdf》資料免費下載
2023-10-27 11:42:160 電子發(fā)燒友網(wǎng)站提供《基于UC3875和C8051F040單片機設計開發(fā)的智能充電器.pdf》資料免費下載
2023-11-06 10:34:584 電子發(fā)燒友網(wǎng)站提供《基于C8051F040的CAN總線與RS-232通信設計.pdf》資料免費下載
2023-11-08 10:13:290
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論