 電子發燒友App
電子發燒友App


伺服電路是VCD影碟機的核心電路之一,其作用是機器工作時,保證激光頭準確地跟蹤掃描光盤上的信息軌跡,從而有效地拾取其圖像和聲音信號。因為信息紋的寬度只有0.5μm,軌跡與軌跡之間節距只有1.6μm,光碟在旋轉中信號面必然有一定的波動,所以要保證激光頭準確讀取信息,必須設置精密的伺服電路,用以進行自動控制。這種伺服電路如同錄像機伺服電路一樣,均是通過取樣和比較,產生誤差信號來進行控制的,同樣具有速度伺服和相位伺服兩個環路。雖然現在的VCD機中均采用全數字伺服電路,使性能進一步穩定可靠,但其結構仍然復雜,而且牽連甚廣,一旦發生故障,維修起來比較困難。本文介紹VCD機伺服電路的故障特點、故障根源和檢修邏輯,并結合實例示出檢修方法。
一、伺服電路的故障特點
VCD機伺服電路具體包括聚焦、循跡、進給和主導軸伺服等電路,其中任何一種伺服電路發生故障都會使機器不能準確拾取光盤信息,導致圖像、聲音質量下降,甚至不能工作。聚焦伺服出現故障,會導致不能正確檢索而讀不出曲目(俗稱“不讀盤”),微處理器則認為無光盤而指令停機。循跡伺服出現故障,則會使圖像質量明顯降低,出現嚴重的“馬賽克”現象,有的還出現停頓和死機現象。主導軸伺服發生故障主要表現在主軸電機不轉或轉速不正常,而主軸電機不轉或轉動失速嚴重會造成不能重放或保護停機。主導軸伺服中相位伺服不良時,重放畫面將發生抖動或同步不穩的現象。
伺服電路之間相互關聯,而且與其它電路也有著內在的聯系。比如,進給伺服的取樣信號取自循跡誤差信號,并作為循跡的粗調。在電路結構上,主導軸電機、循跡進給電機驅動、及循跡線圈、聚焦線圈驅動共用同一驅動電路,甚至和托盤電機共用同一驅動電路。因此,只要驅動電路出故障,將造成多個伺服電路工作不正常。再者,伺服系統還與前置放大、伺服控制電路、供電電路、微處理器電路,以及激光頭有著重要聯系,這些電路和器件中的任何一個有故障都會造成伺服系統工作失常。另外,伺服系統的工作受系統控制并遵循一定的工作程序,即由加載→激光頭回內極限位置→激光管供電發光→聚焦搜索→主導軸旋轉→讀盤并顯示總曲目(TOC)→根據人工指令等這樣的順序進入相應的工作狀態。所以,可以認為伺服的故障也是錯綜復雜的,這些就是伺服電路的故障特點。
二、伺服電路故障分析與檢修
1.聚焦伺服電路 聚焦伺服的作用是控制物鏡上下運動進行聚焦搜索,保證激光束正確聚焦并讀盤。在放入光碟開機的初始階段(又稱初始化),激光頭的物鏡與碟片之間的距離不可能使激光束聚焦在焦點上,甚至不在聚焦跟蹤的范圍之內,因此在剛開機時要執行聚焦搜索動作,由激光頭中的聚焦線圈控制物鏡作上下運動尋找焦點,使激光束始終準確地聚焦在碟片上。如果發生故障便無法進行聚焦或聚焦不良,導致無法讀出曲目(TOC)等故障現象。
聚焦伺服電路的常見故障通常有兩種特征:(1)放入碟片后開機,碟片不轉,而且無聚焦搜索動作;(2)碟片能瞬時轉動,而后自動停機。
第一種故障特征表明,可能是聚焦驅動電路或伺服處理電路以及聚焦線圈本身有故障,當然要在激光頭有激光束發出的前提下才可下定論。另外,物鏡上太臟或激光通路上灰塵侵蝕嚴重使光路受阻也會產生此類故障現象。檢修時應首先檢查激光頭是否清潔,再檢查是否有激光束發射,檢查各連線插座是否松脫,然后對驅動電路進行檢查。驅動電路通常是集成電路,其工作電壓較高,一般在±12V左右,而且驅動電流較大。這些集成電路功耗較大,往往發熱較高,容易造成虛焊現象,故先要檢查電路板有無虛焊(元件過熱后引起引腳脫焊),再用萬用表測量驅動集成電路的電源電壓和輸出電壓,以及在路正反向電阻。如果其輸出電壓異常而在路正反向電阻正常,表明驅動集成電路無問題,故障可能出在伺服處理器(又稱伺服控制器),應進一步檢查其工作狀態,即電壓、電阻參數。在實際檢修操作中,往往采取從伺服控制、伺服驅動、聚焦線圈的檢修順序進行。
出現第二種故障特征時,涉及的故障范圍較大。激光頭、電機驅動電路、伺服處理電路、信號前置放大電路等出現問題均會造成這種故障特征。檢查時先從激光頭入手,看是否有激光束發射,看物鏡是否清潔,再檢測電機驅動電路。若經上述檢查均正常,再用示波器檢測聚焦信號放大電路是否有RF信號輸出,而且正常時的RF信號幅度在0.8~1.5Vp-p范圍內。如果無RF信號,說明光路信號有問題應檢查激光頭中的光電接收二極管。在激光頭中設置有4個光敏二極管進行聚焦和循跡檢測,若出現損壞會造成RF信號丟失,通常采用檢測“眼圖”波形來判斷故障。如果有RF波形,說明光敏二極管沒有問題;若RF波形幅度較正常值小,應檢查激光管發射功率是否降低,光路是否受阻,如果均無問題,則故障可能是聚焦增益、聚焦平衡失調引起的。因為RF信號幅度變小時,無法形成聚焦OK信號(FOK)和聚焦過零信號(FZC),主控制微處理器(CPU)若得不到上述兩種信號(實際為聚焦在焦點時的信號,此時聚焦誤差電壓為0V),將不能發出指令啟動主導軸電機使碟片旋轉。可試調聚焦增益和平衡電位器,看主導軸能否轉動。檢修此類故障時應以FOK信號為突破點,劃清故障范圍,有針對性地進行分析,才能準確找到故障點并予以排除。
2.循跡伺服電路 通常循跡伺服將進給伺服包括在內。實際上,循跡伺服使激光頭作左右移動,而進給伺服使激光頭作前后移動,兩者的共同作用保證激光束在播放過程中始終照射在光碟的信號軌跡上。從兩者關系而言,進給伺服是循跡的粗調,而循跡伺服則為細調。循跡伺服還與聚焦伺服有著內在的聯系,要使循跡伺服電路正常工作,必須要有聚焦信號(FOK)這個前提條件,如果沒有FOK信號,就會自動停機而無循跡誤差信號產生,更談不上進行循跡伺服了。
循跡伺服電路的故障比較多,其電路結構相對而言比其它伺服電路復雜,而且還與其它電路有牽連。因此,對其故障的判斷有一定的難度,一般情況下搜索時間過長且不出圖像和伴音或偶能出圖聲但質量差,以及不能編程、跳選和隨機播放,可以初步判斷故障在循跡伺服電路。
循跡伺服電路包括循跡檢測、循跡誤差放大、增益調節、循跡控制、循跡驅動等電路。通過對循跡誤差信號的檢測而得到的循跡誤差信號,一路通過數字伺服處理電路控制循跡線圈驅動電路,再驅動循跡線圈作水平移動;另一路同樣送至數字伺服處理電路處理,再經驅動放大,然后驅動進給電機動作,使激光頭徑向移動。兩者的共同作用使激光束始終跟蹤旋轉光盤上的信息紋(又稱信息軌跡)。值得注意的是,VCD機的聚焦、循跡伺服處理(伺服控制)都是由一塊集成電路芯片來完成,通常先收到FOK信號后,循跡伺服電路才開始正常工作,所以聚焦信號有無舉足輕重,檢修時切不可忽視。
檢修方法是,開啟機蓋,不放碟片并卸下碟片夾持器,觀察激光頭在接通電源的瞬間有無向內的滑動動作(向主導軸方向),如果開機前已到位應先試用手指撥動進給電機傳動蝸桿,將激光頭撥至外端再通電觀察。若有向內滑動現象,表明進給是正常的,也由此可以推測有循跡誤差信號TE產生,因為進給伺服的取樣信號來自于循跡誤差信號。那么循跡伺服的故障范圍可以縮小到伺服處理控制器、循跡伺服驅動電路,以及循跡伺服線圈等后級電路。如果沒有向內滑動的現象,表明故障在伺服控制器前面的電路,先檢查增益調節電路,即用示波器測試增益調節電路是否有TE信號波形輸出,以及波形幅度是否正常,也可試調循跡增益電位器和E-F平衡電位器,觀察波形是否正常。循跡增益電位器(TRC)是為了穩定循跡伺服而設置的,若調整不當,會使激光束焦點偏離正確的軌跡,發生跳軌或滑軌,甚至不能讀取TOC。E-F平衡電位器(TEBAL)是為補償E、F兩只循跡檢測光電二極管之間的固有偏差和穩定循跡伺服,以使執行機構能在碟片的平衡軌跡上,當其調整不當,機器將不能正確感知所需的信號軌跡,造成引入時間長,甚至不能讀取TOC。增益與平衡都可以在TE波形上較明顯看出來,增益不夠會出現幅度小,不平衡則反映為0V線上下幅度不一致,可調整增益、平衡電位器加以改善。
如果有TE信號波形,則可判斷故障在增益調節電路至循跡線圈之間,應重點檢查數字伺服處理器、驅動電路和循跡線圈本身;若無TE信號波形或波形不正常,則說明故障在增益調節電路至激光頭之間,可用示波器檢測誤差信號放大器輸入端的TE信號波形,若仍無波形,故障可能在激光頭。通常放入碟片很長時間也檢索不出圖像和伴音信號,一般是聚焦或循跡不良,但這又有兩種情況:(1)聚焦搜索后能讀取TOC;(2)不能讀取TOC,即顯示“NO DISC”。前者表明循跡伺服出故障的可能性較大,后者說明激光頭老化或聚焦不良。
3.主導軸伺服電路 VCD光盤內圈為500轉/分鐘,而外圈則為200轉/分鐘,光盤轉速在整個播放過程中要變化2.5倍,而要求其線速度不變(稱為恒線速CLV),這就需要主導軸電機進行無級變速,保證光盤信息紋與激光頭之間的相對運動速度恒定,因此,主導軸電機的旋轉需要進行伺服控制,才能保證其正確變速和精確地運轉。
要使激光束通過光盤的表面速度能保持恒線速度,必須要從光盤上獲得頻率數據并與機器內部基準頻率進行比較,產生一個控制電壓來驅動光盤,使之按照正確速度旋轉。所以,VCD機的主導軸伺服是從解調后的重放視頻信號中分離出幀同步信號與石英晶體振蕩器產生的基準信號,經頻率、相位比較器比較后,得到一個頻率、相位誤差信號,再將誤差信號轉換成控制電壓,然后經驅動放大后去控制主導軸電機的轉速和相位。
主導軸伺服電路的故障現象最多的是主導軸電機不轉,而這一故障的牽涉面較廣,與激光管的好壞、聚焦伺服和進給伺服電路的工作正常與否有直接的關聯,因為只有在這些電路完好并進入初始工作時,微處理器(CPU)才接受反饋信息,認定準備工作已經做好,在人工操作指令的控制下才發出命令接通主導軸電機電源,使機器進入設定的工作狀態。
所以,檢修主導軸伺服電路時,必須先檢查上述電路,再對主導軸伺服電路進行檢查。如果激光頭物鏡有上下抖動的聚焦動作和激光頭有瞬時內滑動作且有紅光束,而按下重放鍵主導軸電機不轉(光碟不轉),可能是電機驅動電路或電機本身有故障,應重點檢查其驅動電路電壓,一般輸入端電壓在2.5V左右,輸出端電壓在6V左右。還可根據資料查詢各引腳的在路正、反向電阻值并進行檢測。對于電機是否損壞,可用萬用表R×1Ω擋直接測量其阻值(一般直流電阻在20~30Ω)來判斷。有時還可用3V電池試驗,以電機能否轉動來判斷其好壞。當然,數字伺服電路損壞或異常,就無法產生誤差信號和誤差控制電壓。前置信號處理電路有問題,就不能產生伺服誤差取樣信號。晶體振蕩器停振就不能產生基準比較信號。所有這些均會使驅動電路失去輸入控制信號而造成主導軸電機不轉,最終導致機器無法讀盤而不能工作。
再者,主導軸伺服電路故障還常表現為主導軸電機能夠轉動,但轉動不平穩,時快時慢,故障特征是畫面出現停頓。這類故障的主要原因是主導軸CLV伺服電路工作不良,應檢查晶振輸出的時鐘信號是否正常(基準信號),檢查DSP電路輸入的復合數據信號是否正常,如果DSP電路輸入的EFM信號不正常,就無法取出主導軸CLV伺服所需要的幀同步信號,即使能正確分離幀同步信號而如果基準信號失常則比較不出正確的誤差信號,盡管此時DSP電路有驅動信號輸出,但由于失去控制作用,會導致上述故障現象的產生。另外,主導軸伺服電路中元件性能變化(如阻容元件變值、晶振頻率變化),還會引起圖像無彩色、黑白畫面扭曲等現象(伴音正常),這是時基誤差所致,檢修時必須要引起注意。
三、故障檢修實例
[例1]故障現象 松下S-6001C型VCD機,能裝碟和出碟,但不能讀出曲目,也不能播放。
分析與檢修 開啟機蓋觀察,發現激光頭在接通電源瞬間有內滑回歸的進給動作,這表明進給伺服正常,同時也說明激光頭有激光束發出,有循跡誤差信號產生,由此進一步推斷,數字伺服電路、數字信號處理(DSP)電路也屬正常,故障范圍縮小到聚焦/循跡驅動電路。
該機機心是典型的飛利浦CDM12機心。重點檢測U3(TDA7073A)驅動集成電路各腳電壓與在路電阻,發現聚焦輸出端{13}、{16}腳電壓僅為0.6V(正常為6V),拔下聚焦線圈插頭,測它們的電阻,結果{16}腳正反向對地電阻均為1.3kΩ(正常時正、反向電阻分別為8.5kΩ和9.5kΩ),判定驅動集成電路已短路性損壞。將其換新,機器能正常播放。順便指出:當該驅動電路性能變壞時,將使驅動力降低而導致聚焦搜索的上下抖動幅度(即伸縮幅度)不夠,可能產生時而能讀盤,時而不能讀盤的現象。
[例2]故障現象 萬利達N28型VCD機,放入光碟不能播放,也不顯示TOC。
分析與檢修 打開機蓋觀察,開機瞬間光碟轉動一下后停止,說明主導軸電機和驅動電路均正常,也表明其與CPU間的通信聯系基本正常。卸下夾持器再開機查看,物鏡有聚焦搜索動作,而且只抖動2次就檢索完畢,說明激光頭能正常發射激光,表明聚焦伺服電路也正常。那么是什么原因引起主導軸不轉呢?這要從自檢工作程序分析入手。
由工作原理得知,碟片加載完成后,進給電機將光頭組件移向光盤內圈零軌附近,觸動檢測開關,給CPU提供回位檢測信息,開始聚焦訪問。由CPU來的聚焦訪問信號加到數字伺服處理器并輸出控制信號,經驅動放大后驅動聚焦線圈,控制物鏡作上下動作進行聚焦搜索,同時碟片的反射信號由光敏二極管接收后,進行聚焦誤差檢測,CPU接收到聚焦誤差檢測過零信號(FZC)后立即指令停止驅動物鏡。然而物鏡停止搜索并不等于聚焦訪問結束,CPU還要判斷碟片反射來的RF信號幅度是否最大、FOK信號是否正常(即焦點是否最小),只有當FOK、FZC信號均正常時,才認定聚焦完畢,并指令主導軸伺服電路驅動主導軸旋轉。
從故障現象來看,雖能進行聚焦搜索,但CPU并未認定FOK信號正常,所以沒有發出主導軸旋轉指令,從未顯示曲目(TOC)可以窺見一斑。為節省檢修時間,先從光敏二極管檢查入手,仔細檢測接插座A109D2~D4的連線,發現其{12}腳(D4)電阻值較大,拆下發現該連接線從插頭根部折斷,可能是光頭架來回移動造成斷裂,但從外表看不出來。重新焊接好斷線,機器工作恢復正常。
- VCD影(8205)


聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。 舉報投訴
相關推薦
選購DVD影碟機的技巧
VCD/DVD機中激光頭的工作原理分析
 18565
18565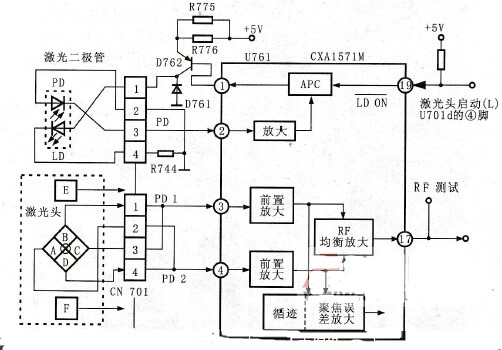
DVD影碟機故障檢修方法及注意事項說明
26758電子電路故障查找與檢修PDF版電子書免費下載
 149
149采用DL0165R芯片的影碟機電源電路圖,DL0165R DVD PLAYER POWER SUPPLY
5088電源電路故障檢修相關知識
111VCD機伺服電路故障檢修
6915具有流媒體播放功能的DVD影碟機設計
219激光影碟機工作原理
196高清影碟機產業聯盟 DVD進互聯網時代
821影碟機的色差分量輸出
1034影碟機的S端子輸出
706影碟機的VGA輸出
1388影碟機的復合視頻端子
732影碟機的同軸輸出
1493影碟機的MPEG4視頻解碼
447硬盤播放器與MP4播放機/DVD影碟機的區別
1730影碟機增設高畫質S端子電路圖
715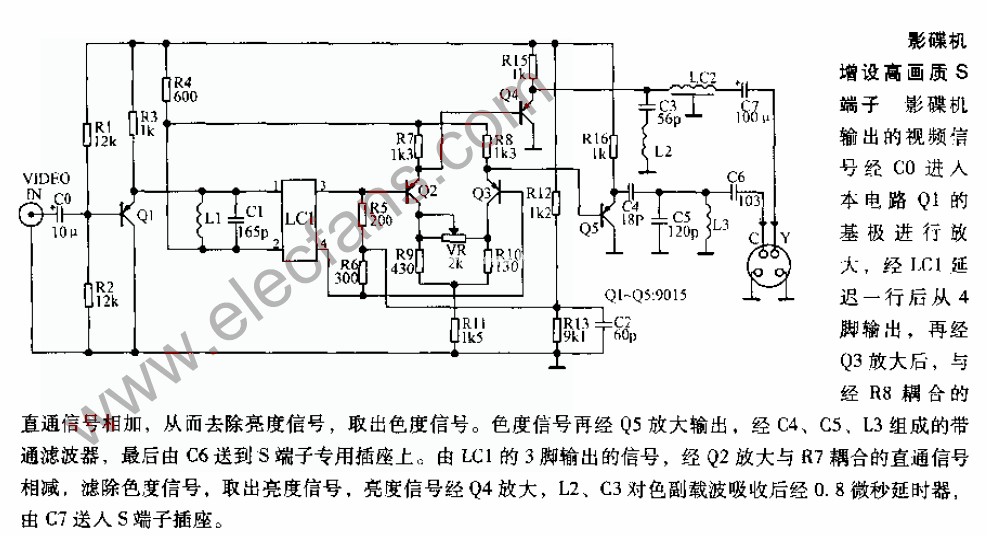
松下A450系列DVD影碟機開關電源電路圖及原理分析
4844
長虹VD6000型VCD機電源電路原理分析及故障維修
2093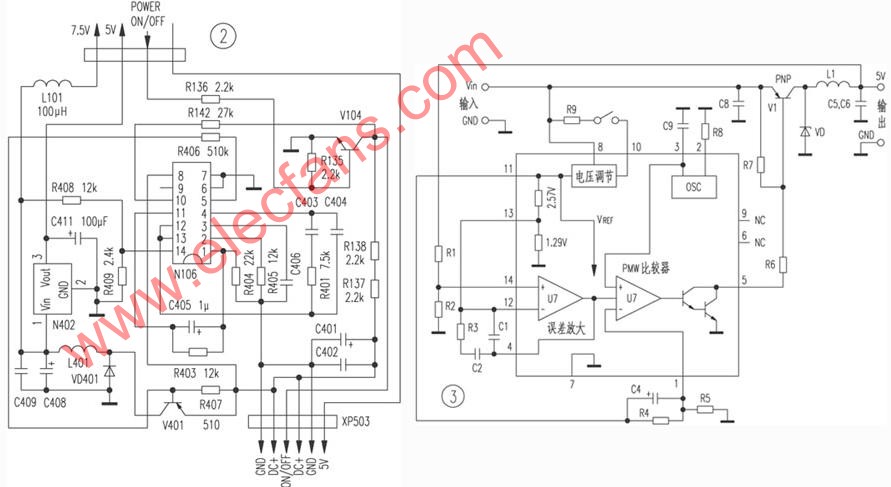
DVD SVCD影碟機集成電路維修資料手冊
682NEC電子推出業界最高速系統芯片—全球首次將藍光影碟機功能單
616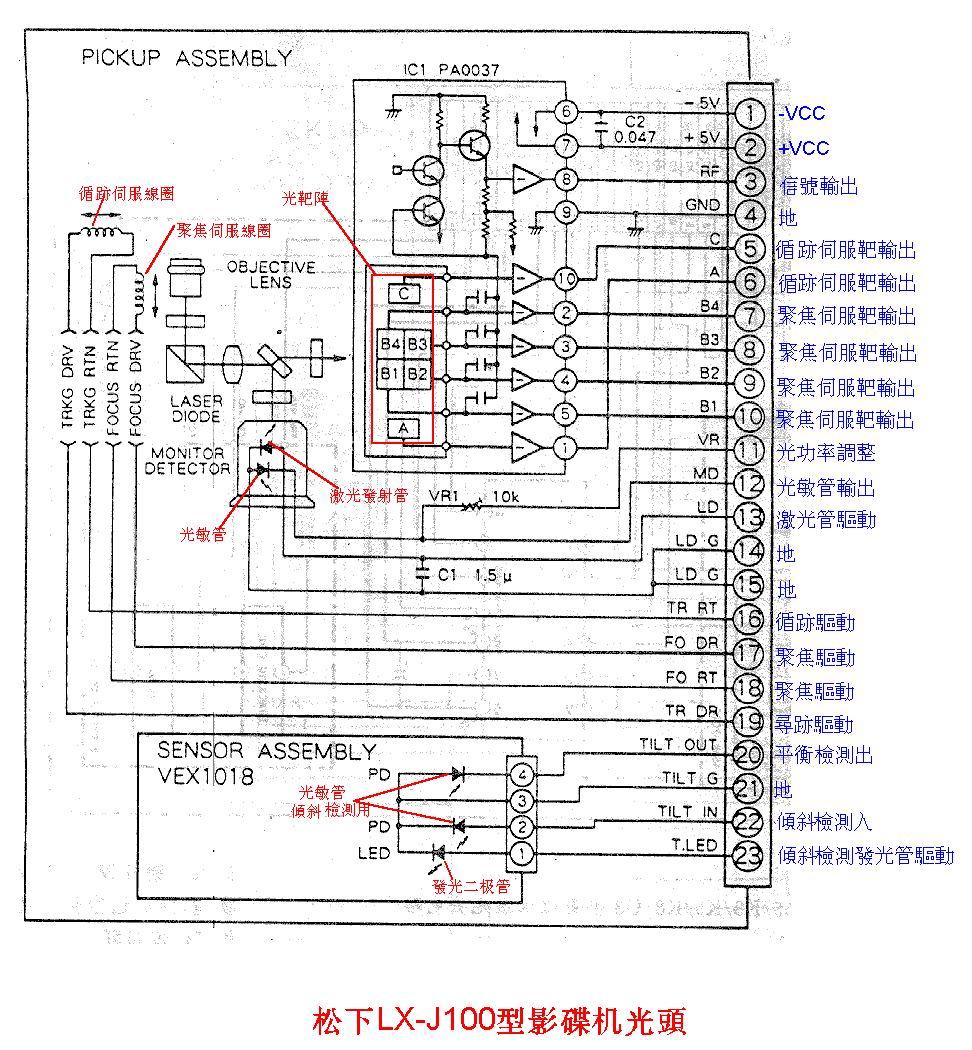

松下DVD-A100型影碟機故障速修
2007- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網絡
- 醫療電子
- 人工智能
- 虛擬現實
- 可穿戴設備
- 機器人
- 安全設備/系統
- 軍用/航空電子
- 移動通信
- 工業控制
- 便攜設備
- 觸控感測
- 物聯網
- 智能電網
- 區塊鏈
- 新科技
- 聯系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應鏈服務 PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區合作
- 劉勇:liuyong@huaqiu.com
-
關注我們的微信

-
下載發燒友APP

-
電子發燒友觀察



版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1
- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網絡
- 醫療電子
- 人工智能
- 虛擬現實
- 可穿戴設備
- 機器人
- 安全設備/系統
- 軍用/航空電子
- 移動通信
- 工業控制
- 便攜設備
- 觸控感測
- 物聯網
- 智能電網
- 區塊鏈
- 新科技
- 聯系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應鏈服務 PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區合作
- 劉勇:liuyong@huaqiu.com
-
關注我們的微信
-
下載發燒友APP
-
電子發燒友觀察
版權所有 ? 深圳華秋電子有限公司
電子發燒友 (電路圖) 粵公網安備 44030402000349 號 電信與信息服務業務經營許可證:粵 B2-20160233工商網監
湘ICP備 2023018690 號
評論