 電子發燒友App
電子發燒友App


1?系統結構
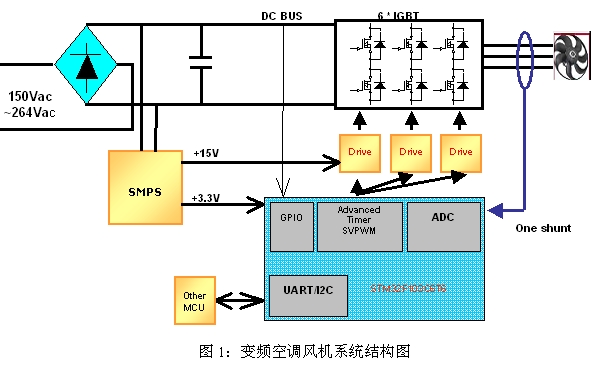
此變頻空調風機方案采用意法半導體公司STM32(ARM :Cortex-M3) MCU 平臺,永磁同步電機(PMSM)矢量控制(FOC)方案使用單電阻(Single Shunt)的電流檢測和無位置傳感器(Sensor-less)的速度位置檢測來實現。
系統結構如圖1所示,MCU選用STM32F103C6T6;功率模塊驅動采用3片L6390D,每個L6390D都內置有運放、比較器及智能關斷保護電路,運放可以用來放大采樣電流,比較器及智能關斷保護電路可以用來實現電機過流保護;IGBT為6片STGDL6NC60D。
L6390D自帶的智能關斷功能可實現過電流保護電路(OCP),加上過電壓(OVP)和欠電壓(LVP)等保護功能,使系統工作安全可靠。

圖1 變頻空調風機系統結構圖
2 低成本高性能的永磁同步電機的矢量控制方案
永磁同步電機的矢量控制,具有動態響應快,穩速精度高,功率密度大,效率高,噪音低等特點,是一種高性能的電機控制系統。矢量控制運算需要獲取電機三相電流和準確的轉子位置信號,通常使用電流傳感器和位置速度傳感器,這增加了系統的成本。對風機這類負載,負載相對穩定、起動力矩不大的應用,采用廉價的單電阻電流采樣和無位置傳感器永磁同步電機的矢量控制方案,既有永磁同步電機的矢量控制的優點,達到應用性能;同時又可達到低成本的目標。
MTPA(每安培電流最大轉矩)控制,針對內置式永磁同步電機,提高風機系統效率。
采用單電阻電流采樣、無位置傳感器永磁同步電機的矢量控制如下圖2:

圖2 永磁同步電機矢量控制框圖
2.1 單電阻電流采樣
為了降低系統成本,本方案采用了先進的單電阻采樣技術。一般來講,矢量控制算法需要采集電機至少兩相電流,但單電阻采樣只需要采集負母線的電流即可。

圖3 單電阻采樣框圖
表1 單電阻采樣狀態表

圖3是單電阻采樣的框圖,對于橋臂的每一個開關狀態,其流過的電流狀態如表1所示。在表1中,“0”表示開關管關斷,而“1”表示導通。由于電流在一個PWM周期內幾乎不變,因此只需要在一個PWM周期內采樣兩次即可得到該時刻電機每一相電流的狀態,因為三相電流之和為零。
單電阻采樣會遇到一些挑戰,空間矢量脈寬調制器(SVPWM)在空間矢量的扇區邊界和低調制區域的時候,會存在占空比兩長一短和兩短一長以及三個幾乎一樣長的時刻。這樣的話,如果有效矢量持續的時間少于電流采樣時間,則會出錯。本方案采取的辦法是在相鄰邊界的時候插入固定時間的有效矢量,而在低調制區域的時候,采用的是輪流插入有效矢量的方法。插入有效矢量會給電流波形帶來失真,這種情況下需要通過軟件來進行補償。
單電阻采樣的優點除了降低系統的成本,還有就是它檢測三相電流時都基于相同的增益和偏移,一致性好。缺點也是明顯的,對于MCU來說,算法復雜了其運算時間要增大,代碼比三電阻也要長一些;對于電流檢測而言,其波形失真比起三電阻方法來說,要稍微大一些。其詳細的對比如表2所示。單電阻采樣的性能對于變頻空調的應用是完全可以勝任的,而且成本低廉,這也就是為什么大部分家電廠家都愿意選擇單電阻采樣的原因所在。
表2 三電阻與單電阻的對比

2.2 無位置傳感器轉子位置和速度檢測
只需獲取三相電流和母線電壓,通過算法計算出轉子位置和速度,不需要增加額外的器件和電路。
無位置傳感器算法,包括反電動勢檢測(Luenberger Observer) 和轉子位置/速度重構(PLL: Phase Lock Loop )兩部分,結構如下圖4:

圖4 無位置傳感器位置/速度檢測結構圖
2.3 MTPA效率最優控制
MTPA(每安培電流最大轉矩)控制,也就是系統效率最優控制,下面等式為永磁同步電機的力矩方程,永磁同步電機力矩:包括同步力矩和磁阻力矩。

永磁同步電機從電機結構上來分,可分為磁鋼表貼式和內置式兩種。表貼式永磁同步電機(SM-PMSM),直軸電感等于交軸電感(Ld = Lq);而內置式永磁同步電機(I-PMSM),直軸電感小于交軸電感(Ld < Lq)。
● 表貼式永磁同步電機,Ld等于Lq,只有同步力矩,控制ids等于零時,系統效率最優。
● 內置式永磁同步電機,Ld一般小于Lq,存在同步力矩和磁阻力矩,當ids小于零時,可以利用磁阻力矩使系統效率最優。內置式永磁同步電機MTPA功能示意如圖5。

圖5 MTPA功能示意圖
3 針對空調風機應用的系統設計
針對空調風機應用的特點,加入噪音消除、抗臺風起動及電機缺相檢測等功能模塊。
3.1 噪音消除功能
為提高空調舒適度,對空調系統的噪音指標有嚴格的要求,也是評價一個空調質量好壞的重要指標。對于功率不大且為主要噪音源之一的空調風機,低噪音顯得尤為重要。
具有正弦型反電動勢或氣隙磁場的永磁同步電機(正弦波永磁電機PMSM),采用FOC矢量控制,輸入正弦的定子相電壓和定子相電流可產生穩定的輸出力矩,具有低噪音的特點。但是,在應用中發現,正弦波永磁電機反電動勢很少能難達到理想的正弦型,有的干脆就是一個反電動勢為梯形波的永磁同步電機(方波永磁電機BLDC),這種電機采用FOC矢量控制,會使定子電流畸變而產生電機噪音。
針對反電動勢波形介于PMSM和BLDC之間這類永磁電機采用矢量控制,專門加入噪音消除功能模塊,通過加入N次諧波補償的方式,使定子電流更接近正弦,從而達到消除或降噪的目的。下面是定子相電流波形得到了很好的改善,噪音得以明顯的降低。

未加入噪音消除功能的電機相電流波形

加入噪音消除功能后的電機相電流波形
3.2 抗臺風起動能力
對于空調室外風機,由于風機在室外,必須保證在各種自然條件的影響下能正常工作,特別是強風的影響下,風機能夠正常起動、運行或報警。對于無位置傳感的永磁同步電機矢量控制,由于動態響應快的特點,正常運行階段在強臺風下也能夠正常工作。但是由于沒有位置傳感,需要有一個開環起動過程,來建立起轉子位置和速度信號,這個起動過程力矩是比較小的,在強臺風影響下,很難保證風機能可靠的起動。
為了抗臺風,除了盡可能增大風機起動力矩外,本方案還增加了抗臺風起動功能模塊,保證風機能夠成功起動或給出強臺風報警信號。風機在停機時,強風吹動下風機的轉速和方向跟風力的大小及風向有關,風機能否成功起動主要和起動前風機的風速相關。這樣,首先需要通過程序檢測出風機起動前的初始轉速和方向,然后根據監測結果進行不同的起動過程處理,可分為如下三種情況:
a 直接起動
當風機正轉且轉速大于一定值的情況下,直接進入運行模式。
b 強臺風報警,停止正常起動
當風機轉速太高,不能保證風機正常起動時,發出強臺風報警,風機停止正常起動。
c 正常起動
除a和b的其他情況,風機能夠確保起動成功,按正常的起動程序起動風機。
經過模擬強臺風測試,系統能夠安全地起動和運行,同時在實際的室外環境測試中,在強風環境下起動、運行的性能也得到了驗證。
3.3 電機缺相檢測
為了保證風機正常起動、運行,每次電機起動前都要進行電機缺相檢測,通過相應的功能函數檢測出風機三相線是否連接正常和3相逆變橋是否完好,如果檢測到缺相,則停止風機起動并報缺相警報,確保風機每次進入起動程序后都能夠成功,同時使系統具有相應的錯誤診斷能力。










 工商網監
工商網監
評論