 電子發燒友App
電子發燒友App


伴隨時代的發展,掃地機器人已經成為不少家庭的必需品。
掃地機器人可以清潔床底,清理各種衛生死角,可以與主人互動,甚至可以作為寵物的玩具,總之掃地機器人已經成為了大家都喜歡使用“智慧家電”。
掃地機器人家庭普及率:
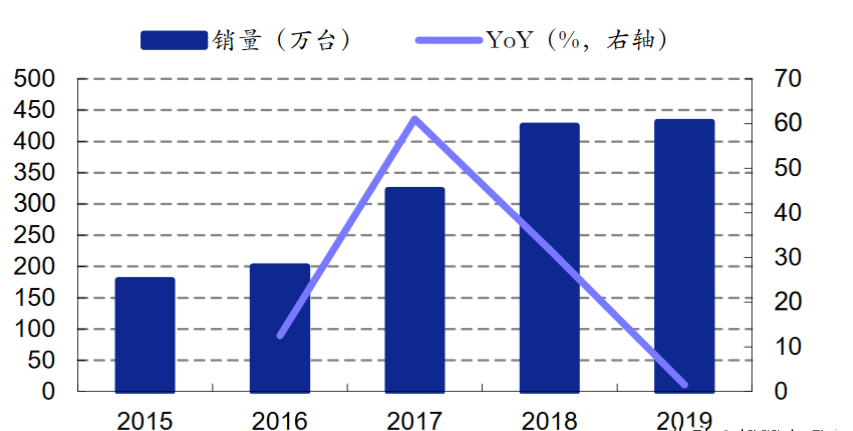
2015-2019年掃地機器人銷量 | 數據來自奧維羅盤
掃地機機器人興起的時間并不長,從2015年開始爆發,到2019年,中國市場掃地機器人銷量接近450萬臺/年。
掃地機器人屬于城市年輕家庭非常歡迎的產品,更主要要的是,這玩意真的可以做好家務。美國掃地機機器人的家庭滲透率最高,2018年達到16%。中國掃地機器人的滲透率略低。
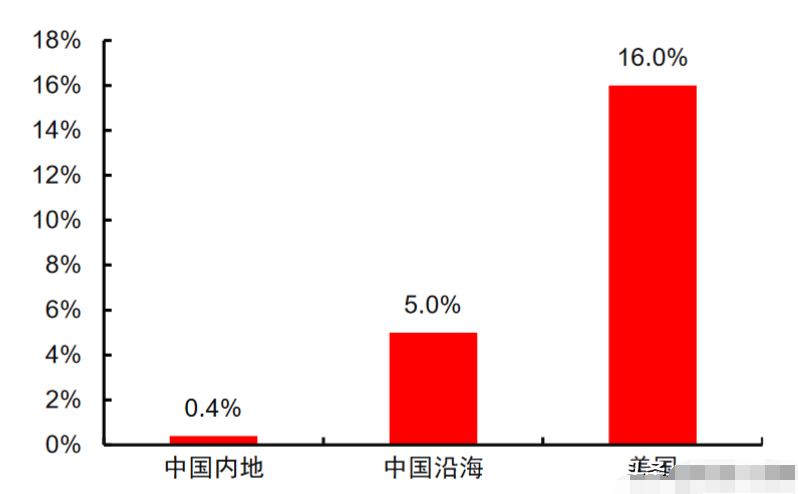
2018年掃地機器人滲透率 | 數據來自GFK
中國掃地機器人的普及率仍然低于5%。從美國的掃地機器人普及率來說,中國仍然有極大的增長空間。
那么售價動輒高達幾千元的掃地機器人,成本到底是多少?
要了解掃地機器人的成本構成,咱們就需要先了解清楚:掃地機器人的工作原理,掃地機器人的硬件構成。
掃地機器人的工作原理
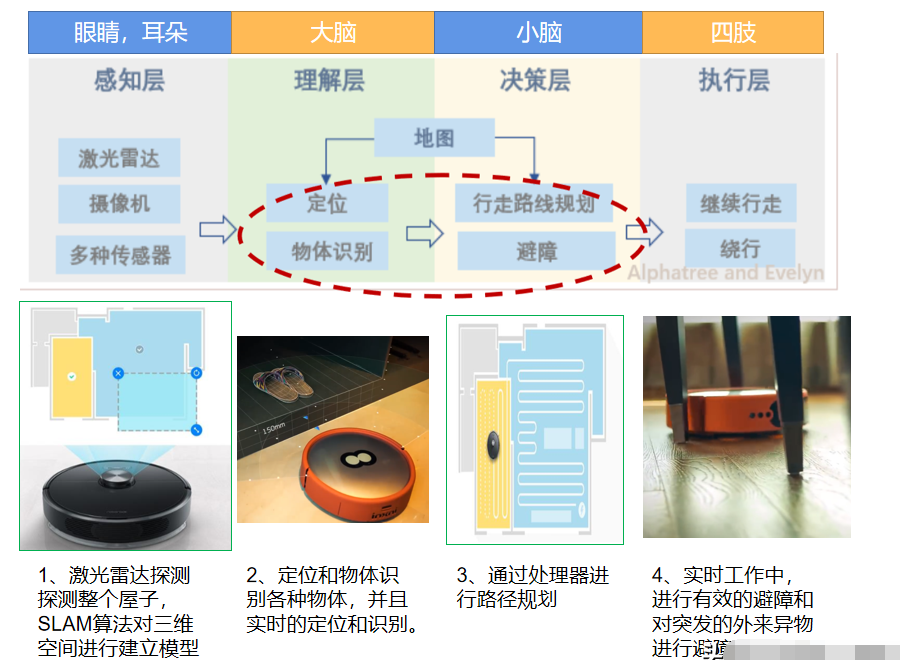
掃地機器人主要工作原理
既然是掃地機器人,我們將這個機器人同人類做對比。
1、掃地機器人眼睛,耳朵,如何知道房間是什么樣子?房間里柜子,鞋子,床,座椅,人都在什么地方?他能不能知道這些東西都是什么?
掃地機器人的眼睛:就是激光雷達,激光雷達主要用來測量距離和識別物體。
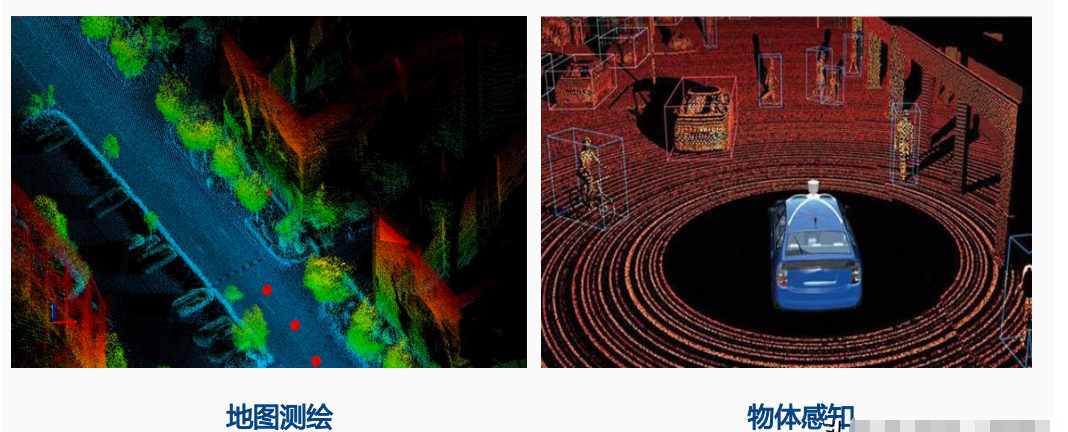
激光雷達的兩大功能 | 圖為無人駕駛汽車的激光導航
我們經常能夠看到,掃地機器人上面有攝像頭。目前SLAM+視覺的導航方式,主要應用在無人駕駛技術上面,例如特斯拉,百度appollo,這些無人駕駛系統上面。這主要原因在于對于CPU的算法和功耗更大。
目前掃地機器人的攝像頭的主要作用,并不是用來識別物體,而是用來同“主人”溝通中,可以獲取到包括面部識別等信息。識別物體主要還是激光導航傳感器。
激光導航傳感器,主要是構建反射物的輪廓,通過輪廓來對比這個物體大致的現實產品。
掃地機器人的耳朵,其實就是麥克風。這個跟我們常用的SIRI,還有小度,天貓精靈都是一個原理。一個麥克風+CPU芯片中的語音智能算法,掃地機器人就可以跟你對答如流了。
有一些掃地機器人,在距離上面的測距使用的是超聲波測距傳感器。這個也屬于掃地人的耳朵,這個主要用在避障方面。

激光和超聲波傳感器的位置
在側邊的超聲波傳感器
跟人的眼睛一樣,掃地機器人的激光傳感器也是在最高的位置。這個真的是整個掃地機器人最貴的地方。可別不小心損壞了,這玩意換一個也有不少錢。(咱們后面有詳細說具體價格)
2、大腦+小腦,也就是掃地機器人的核心處理器:3大核心處理器
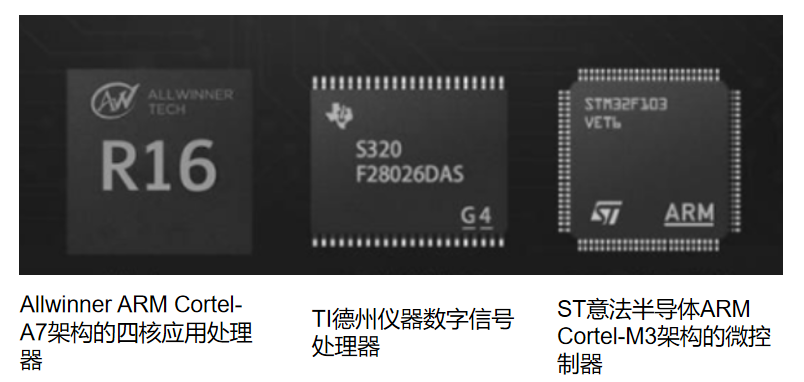
核心處理器
市面上面常見的掃地機器人都是使用的ARM架構的處理器芯片。這玩意跟電腦CPU(X86架構)是一個作用。內置的算法以及人機交互的架構都在這里運行。
1、主控制芯片主要用來做上層應用。包括操作系統及語音,視覺,UI界面交互都是由主控芯片管理,例如小米掃地機器人使用的Allwinner ARM Cortel-A7架構的四核處理器。
2、微控制器主要用來進行路徑規劃。運行SLAM導航算法,建立房間虛擬三維空間地圖。
3、數字信號處理器。這主要是為控制芯片進行路徑規劃后,下發指令給執行的電機,包括舵輪(掃地機人前進,轉向的輪子),掃地刷的電機,吸塵器的電機,讓這些電機工作。

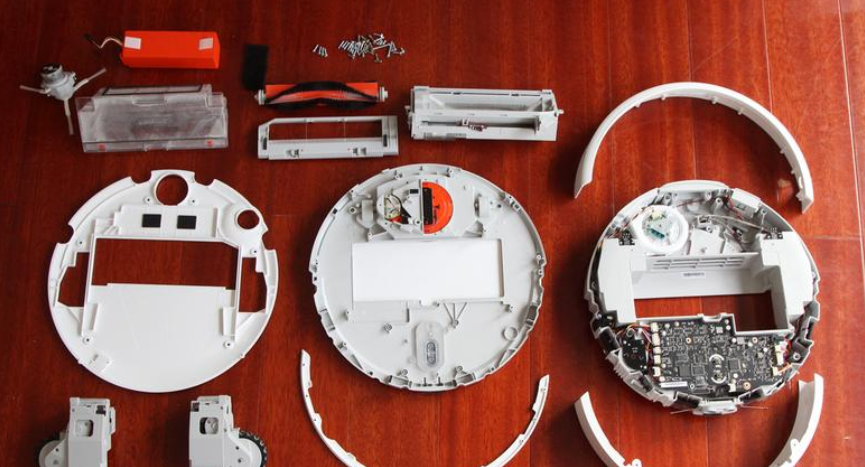
掃地機器人電路板上面的結構件及核心部件 | 小米掃地機器人
掃地機器人的大腦主要用來規劃路徑,避障,以及人機交互,例如:人類設定打掃范圍,以及語音指導掃地機器人進行打掃,都需要處理器進行處理后,將指令下發到執行機構。
小腦屬于跟執行層最近的控制區域,例如我們上面說的,后面兩個處理器:數字信號處理器和微控制器都是對執行層(電機),進行控制和回饋外部信息的處理器。
小米及TCL等掃地機器人都適用意法半導體的M3微控制芯片作為路徑規劃的控制芯片。
路徑規劃的芯片
3、執行機構:電機(無刷電機或者是無刷電機)
掃地機器人執行機構為三種:行走的舵機,掃地的電機,吸塵器電機。掃起來的灰塵被吸入存儲區就是掃地機器人的工作過程。
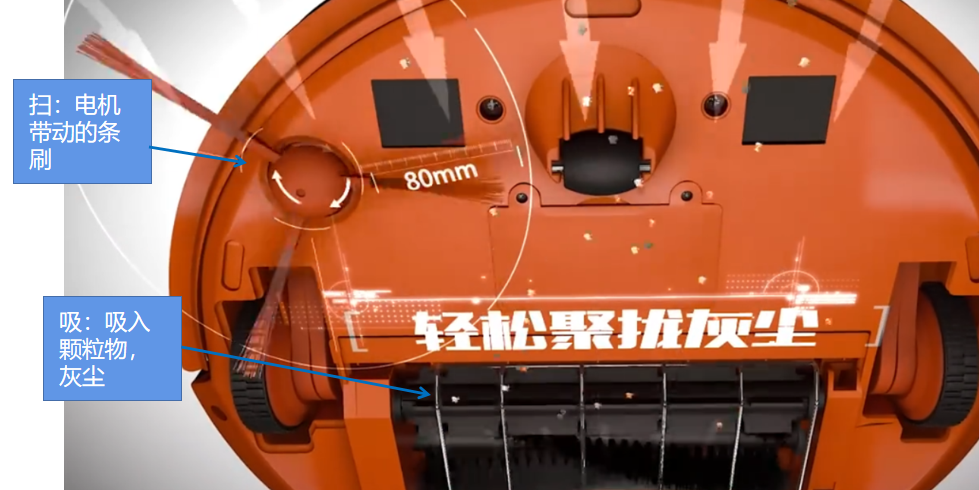
掃地機器人掃和吸的位置
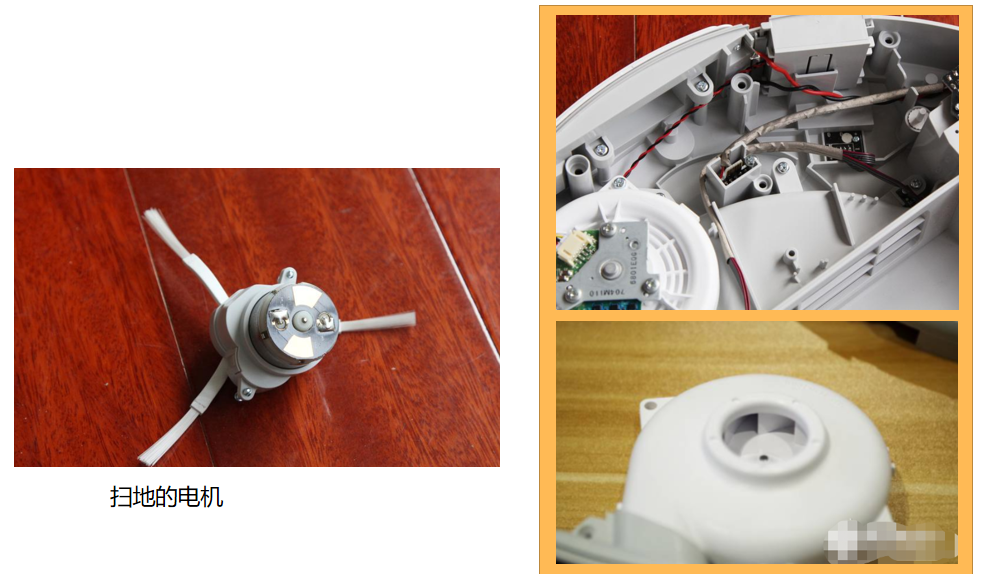
這三個部位的執行機構,行走電機和掃地的電機一般采用有刷電機,速度慢,出力大。吸塵器電機一般都采用無刷直流電機,轉速高,體積小,無刷電機在高速轉動中可以產生1500pa以上的吸力。

有刷或者無刷電機
有不少朋友疑惑,掃地機器人的有刷電機和無刷電機的區別?
插入一個知識點:
從成本上面考慮,無刷電機可以做到20000轉/分鐘——12萬轉/分鐘(這個就是戴森那個網紅吹吹風機的最高轉速),無刷做到高轉速成本比有刷的要低很多。
有刷電機,高轉速一般應用在超高精度的精密儀器上面,因為有刷電機想要做到超高速的時候,換向器的磨損就比較嚴重。能夠做到有刷超高速電機的技術,整個行業內都不多。
我們市面上面常見的有刷小馬達,那個轉速都比較低,一般都在一萬轉一下,價格非常便宜。一個就幾塊錢,甚至低于1塊錢。
掃地機器人想要達到大吸力,使用無刷直流電機屬于非常合適的選擇。
并且伴隨著2010年后,空心杯電機的繞線機技術專利保護達到有效期失效以后,國內深圳,東莞一代做無刷直流小電機的廠商多達上千家。所以無刷電機的價格也下來了。
如果有興趣的可以去找一個MAXON,馮哈伯電機了解一下,這都是給火星探測車,造無刷電機的品牌。(這個涉及的內容就跟掃地機器人不太相關了,不細說了)
所以說,買掃地機器人的時候,不用過于糾結有刷電機和無刷電機。
掃地和吸塵的結構
從原理上面來說,掃地機器人的核心在于:激光導航+路徑規劃+掃地和吸塵的能力。
所以行業內的掃地機器人廠商,核心技術基本上都聚焦在激光導航和路徑規劃上面,還有會添加一些人性化的設計,例如語音互動等等。
整個掃地機器人的硬件構成就可以用一張圖濃縮一下。
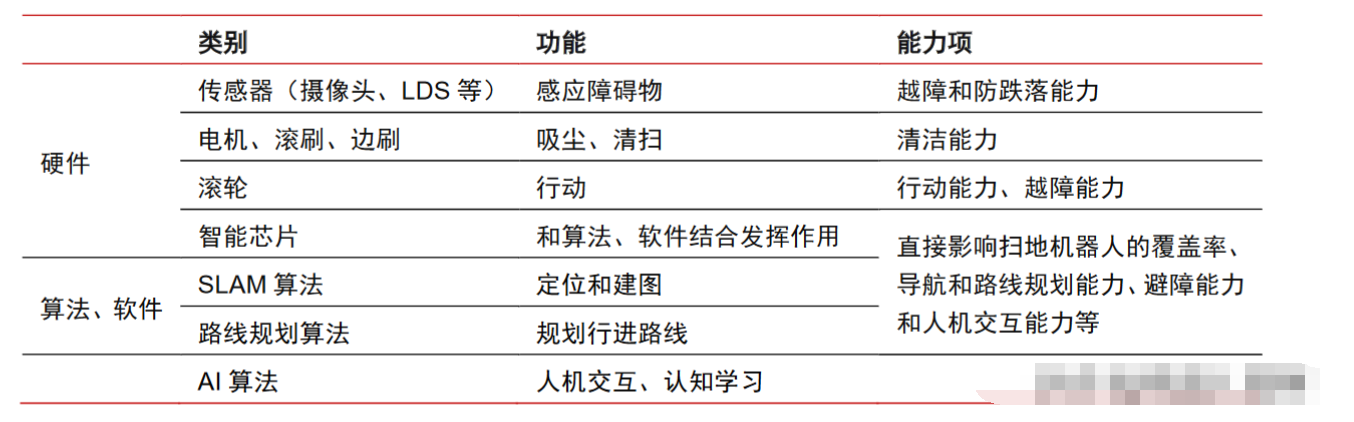
主要構成
掃地機器人硬件構成 | 圖來自小米社區
聊完所有的構成后,不少人心中都有各個部件的重要性的排列順序了吧!
那么咱們來看看一個掃地機器人(高端類型掃地機器人),成本到底是多少?
我們先來看看市場上面掃地機器人的售價:
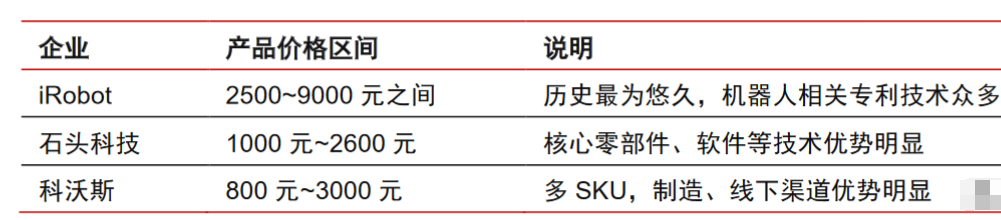
掃地機器人售價
我們來看看帕米爾數據(2019年),給出的一些匿名的各產品的大致的成本。(涉及到行業各品牌,隱藏名稱比較合適)

掃地機器人成本分布
掃地機器人最貴的硬件主要是:控制板(PCB主板)(70-240元人民幣),激光導航傳感器(130元-200元)。
一個高端的掃地機器人核算一下大致的成本在600-900元人民幣。
當然你也別較真,畢竟整個數據的零部件報價,是按照單獨產品的市場價來計算,實際生產有可能會高一些。
對于一個消費品,硬件成本可能只有30%-50%,軟件成本+營銷成本,占據另外50%的比重。這也就是為什么一臺好一些的掃地機器人,售價可能高達3000元的原因。
掃地機器人發展前景:
掃地機器人目前已經成為家庭廣受歡迎的產品。在未來大量的城市家庭智能化程度更高,掃地機器人勢必會成為必備品。
責任編輯人:CC










 工商網監
工商網監
評論