 電子發(fā)燒友App
電子發(fā)燒友App


摘 ? ?要
本文通過(guò)對(duì)機(jī)器人移動(dòng)功能的研制和開(kāi)發(fā),為適應(yīng)各種工作環(huán)境的不同要求而開(kāi)發(fā)出各種移動(dòng)機(jī)構(gòu)。其中全方位輪可以實(shí)現(xiàn)高精確定位、原地調(diào)整姿態(tài)和二維平面上任意連續(xù)軌跡的運(yùn)動(dòng),具有一般的輪式移動(dòng)機(jī)構(gòu)無(wú)法取代的獨(dú)特特性,對(duì)于研究移動(dòng)機(jī)器人的自由行走具有重要愈義。綜合分析了現(xiàn)有移動(dòng)機(jī)器人的移動(dòng)機(jī)構(gòu),移動(dòng)運(yùn)動(dòng)特點(diǎn),分析了其運(yùn)動(dòng)學(xué)特征;提出了移動(dòng)機(jī)器人靜態(tài)步行的穩(wěn)定性判定方法,規(guī)劃了機(jī)器人直線行走步態(tài)、定點(diǎn)轉(zhuǎn)彎步態(tài),以及跨越障礙物的行走步態(tài);并采用PLC實(shí)現(xiàn)對(duì)步態(tài)的控制。
引 ? 言
移動(dòng)機(jī)器人是一種能夠通過(guò)傳感器感知外界環(huán)境和自身狀態(tài),實(shí)現(xiàn)在有障礙物的環(huán)境中面向目標(biāo)的自主運(yùn)動(dòng),從而完成一定作業(yè)功能的機(jī)器人系統(tǒng)。近年來(lái),由于移動(dòng)機(jī)器人在工業(yè)、農(nóng)業(yè)、醫(yī)學(xué)、航天和人類生活的各個(gè)方面顯示了越來(lái)越廣泛的應(yīng)用前景,使得它成為了國(guó)際機(jī)器人學(xué)的研究熱點(diǎn)。 ? 20世紀(jì)90年代以來(lái),以研制高水平的環(huán)境信息傳感器和信息處理技術(shù),高適應(yīng)性的移動(dòng)機(jī)器人控制技術(shù),真實(shí)環(huán)境下的規(guī)劃技術(shù)為標(biāo)志,開(kāi)展了移動(dòng)機(jī)器人更高層次的研究。目前,移動(dòng)機(jī)器人特別是自主機(jī)器人已成為機(jī)器人技術(shù)中一個(gè)于分活躍的研究領(lǐng)域。 ? 從最早出現(xiàn)的機(jī)器人到現(xiàn)在涌現(xiàn)出的形態(tài)各異的移動(dòng)小車,其移動(dòng)機(jī)構(gòu)的形式層出不窮,以美國(guó)、俄羅斯、法國(guó)和日本為首的西方發(fā)達(dá)國(guó)家己經(jīng)研制出了多種復(fù)雜奇特的三維移動(dòng)機(jī)構(gòu),有的已經(jīng)進(jìn)入了實(shí)用化和商業(yè)化階段。 ? 面對(duì)21世紀(jì)深空探測(cè)的挑戰(zhàn),對(duì)各種自主系統(tǒng)的研制是必須的,而移動(dòng)機(jī)構(gòu)又是各種自主系統(tǒng)的最基本和最關(guān)鍵的環(huán)節(jié)。已經(jīng)出現(xiàn)的移動(dòng)機(jī)器人的移動(dòng)機(jī)構(gòu)主要有履帶式、腿式和輪式,其中以輪式的效率最高,但其適應(yīng)能力相對(duì)較差,而腿式的適應(yīng)能力最強(qiáng)但其效率最低。 ? 履帶式移動(dòng)機(jī)構(gòu)是將圓環(huán)狀的循環(huán)軌道卷繞在若干車輪外,使車輪不直接與地面接觸,利用履帶可以緩和地面的凹凸不平。它具有良好的穩(wěn)定性能、越障能力和較長(zhǎng)的使用壽命,適合在崎嶇的地面上行使。但由于沉重的履帶和繁多的驅(qū)動(dòng)輪使得整體機(jī)構(gòu)笨重,消耗的功率也相對(duì)較大。 ? 輪式移動(dòng)機(jī)構(gòu)具有運(yùn)動(dòng)速度快、能量利用率高、結(jié)構(gòu)簡(jiǎn)單、控制方便和能借鑒至今已很成熟的汽車技術(shù)等優(yōu)點(diǎn),只是越野性能不太強(qiáng)。但隨著各種各樣的車輪底盤的出現(xiàn),如日本NASDA的六輪柔性底盤月球漫游車LRTV,俄羅斯TRANSMASH的六輪三體柔性框架移動(dòng)機(jī)器人Marsokohod,美國(guó)CMU的六輪三體柔性機(jī)器人Robby系列以及美國(guó)JPL的六輪搖臂懸吊式行星漫游車Rocky系列,已使輪式機(jī)器人越野能力大大增加,可以和腿式機(jī)器人相媲美。 ? 于是人們對(duì)機(jī)器人機(jī)構(gòu)研究的重心也隨之轉(zhuǎn)移到輪式機(jī)構(gòu)上來(lái),特別是最近日本開(kāi)發(fā)出一種結(jié)構(gòu)獨(dú)特的五點(diǎn)支撐懸吊結(jié)構(gòu)Micros,其卓越的越野能力較腿式機(jī)器人有過(guò)之而不及。
1、機(jī)器人移動(dòng)方式的選擇與結(jié)構(gòu)設(shè)計(jì) ? ? ?
1.1移動(dòng)方式的選擇 ?
現(xiàn)在主流的移動(dòng)方式基本是輪式、腿式和履帶式,但由于其各有各的優(yōu)點(diǎn)與缺點(diǎn),現(xiàn)在的科學(xué)家越來(lái)越追求綜合性能的提高。輪式移動(dòng)機(jī)構(gòu)具有運(yùn)動(dòng)速度快、能量利用率高、結(jié)構(gòu)簡(jiǎn)單、控制方便和能借鑒至今已很成熟的汽車技術(shù)等優(yōu)點(diǎn),只是越野性能不太強(qiáng)。而腿式移動(dòng)結(jié)構(gòu)雖然有很好的越野能力,但是結(jié)構(gòu)復(fù)雜,效率低等缺點(diǎn)。對(duì)于履帶式主要是由于沉重的履帶和繁多的驅(qū)動(dòng)輪使得整體機(jī)構(gòu)笨重,消耗的功率也相對(duì)較大。
針對(duì)本次設(shè)計(jì)的環(huán)境主要是人為環(huán)境,地勢(shì)較平坦,但也需要對(duì)臺(tái)階、樓梯等障礙物進(jìn)行考慮,所以我打算設(shè)計(jì)輪腿結(jié)合式的移動(dòng)方式,在平坦的道路利用輪式結(jié)構(gòu)效率高,迅速等優(yōu)點(diǎn),在需要上臺(tái)階,上樓梯等地方采用腿式結(jié)構(gòu)進(jìn)行越障。
由于機(jī)器人中含腿式結(jié)構(gòu)且需要上臺(tái)階和爬樓梯所以采用四腿結(jié)構(gòu),這是因?yàn)殡m然對(duì)于臺(tái)階就算是輪式結(jié)構(gòu)也能滿足要求,但是對(duì)于爬樓梯輪式結(jié)構(gòu)就不行了,所以需要腿式結(jié)構(gòu)的存在,生活中樓梯隨處可見(jiàn),如果要使機(jī)器人有較好的環(huán)境適應(yīng)能力,上樓梯是必須要克服的。我決定選擇四輪腿式結(jié)構(gòu),而基本結(jié)構(gòu)如圖1。中間為機(jī)器人主體,里面有機(jī)器人的控制系統(tǒng)和驅(qū)動(dòng)上肢轉(zhuǎn)動(dòng)的電機(jī),四肢末端為輪胎,機(jī)器人每條腿都分為上肢和下肢,中間為關(guān)節(jié),下肢可繞其轉(zhuǎn)動(dòng)。
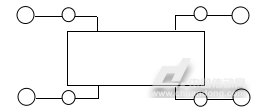
圖1 機(jī)器人基本結(jié)構(gòu)
1.2機(jī)器人移動(dòng)原理構(gòu)想 ? ? 由于環(huán)境較好,基本屬于平坦地面,故主要移動(dòng)方式為輪式移動(dòng),在需要上臺(tái)階或樓梯是才使用腿式結(jié)構(gòu),這是因?yàn)橥仁浇Y(jié)構(gòu)效率較低,只在必須使用腿式結(jié)構(gòu)的時(shí)候才使用,這樣既能提高機(jī)器人的移動(dòng)效率,也能是機(jī)器人有較好的越障能力。對(duì)于上臺(tái)階與爬樓梯的原理基本相同,故我只說(shuō)明我對(duì)爬樓梯的移動(dòng)原理的構(gòu)想。 ? 首先是要在機(jī)器人機(jī)身上安裝傳感器,使其能夠感應(yīng)到前面的障礙物樓梯,然后就是爬樓梯的過(guò)程。在準(zhǔn)備爬樓梯的時(shí)候,首先要把輪子上的剎車系統(tǒng)啟動(dòng),是輪子不能轉(zhuǎn)動(dòng)。然后爬樓梯的過(guò)程如同人走樓梯一樣,先輪流上前腳,等前腳站穩(wěn),再輪流上后腳。
1.3機(jī)器人輪子的選擇 ?
現(xiàn)在市面上的輪子有很多,有標(biāo)準(zhǔn)輪,小腳輪,麥克納姆輪,球形輪,正交輪等。我決定選用麥克納姆輪,因?yàn)樗芎芎玫南蚋鱾€(gè)方向移動(dòng)且沒(méi)有球形輪那么難控制,而且現(xiàn)在麥克納姆輪的制作也比較成熟。
麥克納姆外形像一個(gè)斜齒輪,輪齒是能夠轉(zhuǎn)動(dòng)的鼓形輥?zhàn)樱佔(zhàn)拥妮S線與輪的軸線成α角度。這樣的特殊結(jié)構(gòu)使得輪體具備了三個(gè)自由度:繞輪軸的轉(zhuǎn)動(dòng)和沿輥?zhàn)虞S線垂線方向的平動(dòng)和繞輥?zhàn)优c地面接觸點(diǎn)的轉(zhuǎn)動(dòng)。這樣,驅(qū)動(dòng)輪在一個(gè)方向上具有主動(dòng)驅(qū)動(dòng)能力的同時(shí),另外一個(gè)方向也具有自由移動(dòng)(被動(dòng)移動(dòng))的運(yùn)動(dòng)特性。輪子的圓周不是由普通的輪胎組成,而是分布了許多小滾筒,這些滾筒的軸線與輪子的圓周相切,并且滾筒能自由旋轉(zhuǎn)。當(dāng)電機(jī)驅(qū)動(dòng)車輪旋轉(zhuǎn)時(shí),車輪以普通方式沿著垂直于驅(qū)動(dòng)軸的方向前進(jìn),同時(shí)車輪周邊的輥?zhàn)友刂涓髯缘妮S線自由旋轉(zhuǎn)。
采用全方位移動(dòng)機(jī)構(gòu)的車輪組合情況,輪中的小斜線表示觸地輥?zhàn)拥妮S線方向。每個(gè)全方位輪都由一臺(tái)直流電機(jī)獨(dú)立驅(qū)動(dòng),通過(guò)四個(gè)全方位輪的轉(zhuǎn)速轉(zhuǎn)向適當(dāng)組合,可以實(shí)現(xiàn)機(jī)器人在平面上三自由度的全方位移動(dòng)。4個(gè)全方位輪組成的機(jī)器人底座的力分析如圖,其中為輪子滾動(dòng)時(shí)小輥?zhàn)邮艿捷S向的摩擦力;為小輥?zhàn)幼鰪膭?dòng)滾動(dòng)時(shí)受到的滾動(dòng)摩擦力;ω為各輪轉(zhuǎn)動(dòng)的角速度。
1.4機(jī)器人腿部結(jié)構(gòu)的設(shè)計(jì) ?
設(shè)計(jì)的腿部分為上肢和下肢兩個(gè)部分,上肢連接著機(jī)器人的主體和下肢,下肢連接著輪胎,由于要使機(jī)器人腿能夠滿足運(yùn)動(dòng)要求,所以還需在上肢與機(jī)器人主體連接處設(shè)計(jì)一個(gè)關(guān)節(jié),一個(gè)使腿部結(jié)構(gòu)能在機(jī)器人側(cè)面平面旋轉(zhuǎn)360度。而且由于要控制轉(zhuǎn)動(dòng)和其轉(zhuǎn)動(dòng)的角度故需要在上肢與下肢關(guān)節(jié)處安裝小型電機(jī),所以要留出空間安裝電機(jī)和線路。
如圖2所示,上肢上部分有一個(gè)孔與一根軸,軸是與主體內(nèi)電機(jī)通過(guò)聯(lián)軸器相連,從而來(lái)控制上肢繞主體的轉(zhuǎn)動(dòng),孔與下部分的豎直孔用來(lái)通過(guò)電線,最下面兩孔是用來(lái)和下肢相連。總長(zhǎng)約70厘米,寬度約16厘米。
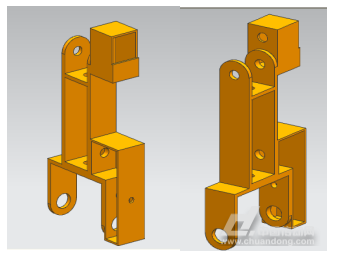
圖2 上肢與下肢UG3維結(jié)構(gòu)圖
2、移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
移動(dòng)機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)是機(jī)器人系統(tǒng)的執(zhí)行機(jī)構(gòu),對(duì)系統(tǒng)精確地完成各項(xiàng)任務(wù)起著重要作用,有時(shí)也可作為一個(gè)簡(jiǎn)單的控制器。構(gòu)成機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的要素有:計(jì)算機(jī)硬件系統(tǒng)及控制軟件、輸入/輸出設(shè)備、驅(qū)動(dòng)器、傳感器系統(tǒng),它們之間的關(guān)系如圖3所示
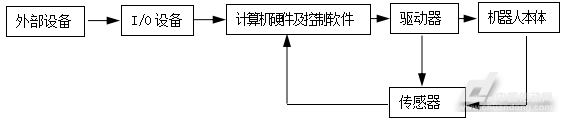
圖3 機(jī)器人控制系統(tǒng)構(gòu)成要素
移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)主要包括系統(tǒng)的功能和體系結(jié)構(gòu)設(shè)計(jì),功能設(shè)計(jì)主要完成控制功能和算法的軟件設(shè)計(jì),而體系結(jié)構(gòu)設(shè)計(jì)是功能在硬件上的實(shí)現(xiàn)。根據(jù)面向的任務(wù)和環(huán)境不同,對(duì)移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)也不同。
目前機(jī)器人運(yùn)動(dòng)控制系統(tǒng)存在主要問(wèn)題有:系統(tǒng)局限于專用微處理器、專用機(jī)器人語(yǔ)言,開(kāi)放性差;軟件結(jié)構(gòu)依賴于微處理器硬件,難以在不同系統(tǒng)間移植;擴(kuò)展性差。針對(duì)這些不足,進(jìn)行機(jī)器人運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)時(shí)應(yīng)考慮以下要求:
(1)開(kāi)放式系統(tǒng)結(jié)構(gòu)。采用開(kāi)放式軟件、硬件結(jié)構(gòu),可以根據(jù)需要方便擴(kuò)充功能,使其適用于不同目的的科研需求;
(2)合理的模塊化設(shè)計(jì)。硬件根據(jù)系統(tǒng)要求和電氣特性進(jìn)行模塊化設(shè)計(jì),不僅方便安裝和維護(hù),而且提高系統(tǒng)的可靠性;軟件按功能分成不同模塊,便于修改、添加;
(3)實(shí)時(shí)性、多任務(wù)要求。控制器必須能在確定時(shí)間內(nèi)完成對(duì)外部中斷的處理,并且可以多個(gè)任務(wù)同時(shí)進(jìn)行;
(4)網(wǎng)絡(luò)通信功能,便于資源共享和多機(jī)器人協(xié)同;
(5)具有一定智能,能根據(jù)實(shí)際情況判斷和決策,如給定速度突變或在合理范圍之外時(shí)的處理、對(duì)故障的自動(dòng)診斷等。
2.1機(jī)器人的驅(qū)動(dòng)系統(tǒng) ? ?
目前,機(jī)器人的運(yùn)動(dòng)控制中較為常見(jiàn)的有直流電機(jī)、步進(jìn)電機(jī)和舵機(jī)。對(duì)于我的課題來(lái)說(shuō),一個(gè)能控制速度的電機(jī)作為麥克納姆輪使用,也需要一個(gè)能精確可控制角度且可以保持的電機(jī)作為腿部關(guān)節(jié)使用。經(jīng)過(guò)我初步估計(jì)電機(jī)轉(zhuǎn)速不是很大,如果使用直流電機(jī),由于轉(zhuǎn)速和力矩的影響,需配置減速器,且不能控制角度。而如果使用步進(jìn)電機(jī),需配置驅(qū)動(dòng)器。
為滿足系統(tǒng)的控制要求,考慮到經(jīng)濟(jì)性等,我準(zhǔn)備采用Dynamixel系列AX-12舵機(jī)它是機(jī)器人專用的伺服電機(jī)。它不但能精確控制角度,作為關(guān)節(jié)角度控制;也可以通過(guò)軟件設(shè)置為無(wú)限旋轉(zhuǎn)模式,作為車輪使用。
舵機(jī)是一種位置伺服的驅(qū)動(dòng)器,適用于那些需要角度不斷變化并可以保持的控制系統(tǒng)。其工作原理是:控制信號(hào)由接收機(jī)的通道進(jìn)入信號(hào)調(diào)制芯片,獲得直流偏置電壓。它內(nèi)部有一個(gè)基準(zhǔn)電路,產(chǎn)生周期為20mS,寬度為1.5ms的基準(zhǔn)信號(hào),將獲得的直流偏置電壓與電位器的電壓比較,獲得電壓差輸出。
最后,電壓差的正負(fù)輸出到電機(jī)驅(qū)動(dòng)芯片決定電機(jī)的正反轉(zhuǎn)。AX-12舵機(jī)是一款智能化、模塊化的動(dòng)力裝置,主要由一個(gè)微處理器、一個(gè)精確的直流電機(jī)、齒輪減速器、位置傳感器、溫度傳感器以及具備通訊功能的控制芯片等組成。
由于AX-12內(nèi)部配有一個(gè)ATmega8微處理器,用來(lái)接收控制器發(fā)送的數(shù)據(jù)包,通過(guò)相應(yīng)的處理后給伺服電機(jī)發(fā)送PWM信號(hào)來(lái)控制電機(jī)的起停。因此,控制舵機(jī)實(shí)際上是去控制ATmega8舵機(jī)的狀態(tài)和參數(shù)都存儲(chǔ)在ATmega8的RAM和EEPROM相應(yīng)的地址里,對(duì)舵機(jī)進(jìn)行控制也就是對(duì)舵機(jī)的相應(yīng)地址讀和寫數(shù)據(jù)的過(guò)程。如表1所示為舵機(jī)的具體參數(shù)。
| 表1??舵機(jī)具體參數(shù) | |||
| 項(xiàng)目 | 參數(shù) | 項(xiàng)目 | 參數(shù) |
| 重量 | 55g | 位移角度 |
0-300° 無(wú)限旋轉(zhuǎn) |
| 減速比 | 1/254 | 最小角度 | 0.35° |
| 工作電壓 | 7VDC-12VDC | 通訊 | 半雙工異步串行通信 |
| 工作溫度 | -5-85攝氏度 | 波特率 | 7343bps-1Mbps |
| 最大電流 | 900mA | 指令包 | 數(shù)字信號(hào) |
| 輸入電壓 |
7V 10V |
物理連接 | TTL多通道(daisy總線) |
| 最大扭矩 |
12(Kgf?cm) 16.5(Kgf?cm) |
材料 | 工程塑料 |
| 轉(zhuǎn)速 |
0.269(秒/60°) 0.196(秒/60°) |
反饋 | 位置、溫度、負(fù)載、電壓等 |
2.2機(jī)器人的感知系統(tǒng) ?
環(huán)境感知能力是移動(dòng)機(jī)器人除了移動(dòng)之外最為基本的一種能力,感知能力的高低直接決定了機(jī)器人的智能性。}fU感知能力是由感知系統(tǒng)決定的,感知系統(tǒng)是機(jī)器人與環(huán)境、人實(shí)現(xiàn)交互的重要I/O工具,是機(jī)器人獲取信息的窗口。移動(dòng)機(jī)器人之所以能在已知或未知的環(huán)境中面向目標(biāo)自主運(yùn)動(dòng),完成一定的作業(yè)功能,是因?yàn)樗軌蛲ㄟ^(guò)多傳感器感知外部環(huán)境信息和自身狀態(tài)。
移動(dòng)機(jī)器人的傳感器可分為內(nèi)部和外部?jī)深悅鞲衅鳌?nèi)部傳感器用來(lái)檢測(cè)機(jī)器人本身的狀態(tài),是完成機(jī)器人運(yùn)動(dòng)所必須的那些傳感器,如位置、速度傳感器等,它們是構(gòu)成機(jī)器人不可缺少的基本原件之一。
外部傳感器用來(lái)檢測(cè)機(jī)器人所處環(huán)境及狀況的傳感器,取決于機(jī)器人所要完成的任務(wù),如視覺(jué)傳感器、超聲波傳感器、紅外傳感器、聲音傳感器等。機(jī)器人用這些傳感器采集各種信息,然后采取適當(dāng)?shù)姆椒ǎ瑢⒍鄠€(gè)傳感器獲取的環(huán)境信息加以綜合處理,控制機(jī)器人進(jìn)行智能作業(yè)。
本設(shè)計(jì)中除了采用AX-12舵機(jī)中自帶的位置、速度、溫度、供電電壓及扭矩等內(nèi)部傳感器外,還采用AX-S1傳感器模塊作為外部傳感器。
2.3內(nèi)部傳感器 ?
AX-12舵機(jī)不但內(nèi)置有位置、速度傳感器用于檢測(cè)電機(jī)的旋轉(zhuǎn)速度以及舵機(jī)的旋轉(zhuǎn)角度,還有內(nèi)部溫度、供電電壓以及扭矩等傳感器,用于檢測(cè)舵機(jī)內(nèi)部的狀態(tài)。當(dāng)AX-12舵機(jī)內(nèi)部溫度、扭矩、供電電壓等超過(guò)額定范圍時(shí),它主動(dòng)反饋這種情況。此外,它還會(huì)閃動(dòng)LED燈或關(guān)閉舵機(jī)扭矩來(lái)保護(hù)自己。
2.4外部傳感器 ?
Dynamixel系列AX-12傳感模塊可以說(shuō)是“麻雀雖小,五臟俱全”,它包含了紅外距離傳感器、紅外遙控器、聲音探測(cè)傳感器、光度探測(cè)傳感器、溫度探測(cè)傳感器以及還具有蜂鳴器的功能。
3、機(jī)器人的控制系統(tǒng)設(shè)計(jì)
機(jī)器人運(yùn)動(dòng)過(guò)程中的受力情況可能會(huì)根據(jù)路面情況不斷變化,因而電機(jī)的負(fù)載也在不停的變化,所以要實(shí)現(xiàn)對(duì)執(zhí)行元件(腿)的行程的準(zhǔn)確控制不能單純依靠對(duì)電機(jī)的運(yùn)轉(zhuǎn)時(shí)間進(jìn)行限定,必須要在執(zhí)行元件上安裝反饋位置的傳感器,這樣,當(dāng)執(zhí)行元件運(yùn)動(dòng)到規(guī)定的位置時(shí)就能通過(guò)控制系統(tǒng)給電機(jī)一個(gè)反饋信號(hào),從實(shí)現(xiàn)對(duì)電機(jī)的控制。
六條腿中1、3、5,2、4、6分別是相同的,所以進(jìn)行控制設(shè)計(jì)時(shí)只需以1、2兩腿的配合為例說(shuō)明即可,3、5腿與1腿相同,4、6腿與2腿相同。
(1)第1腿的傳感器:
在上下擺動(dòng)的極限位置安裝行程開(kāi)關(guān),上極限B1,下極限A1。在前后擺動(dòng)的極限位置和中點(diǎn)位置安裝行程開(kāi)關(guān),前極限Z1,后極限X1,中點(diǎn)位置O1。
(2)第2腿的傳感器:
在上下擺動(dòng)的極限位置安裝行程開(kāi)關(guān),上極限B2,下極限A2。在前后擺動(dòng)的極限位置和中點(diǎn)位置安裝行程開(kāi)關(guān),前極限Z2,后極限X2,中點(diǎn)位置O2。
4、結(jié)論
在對(duì)移動(dòng)方式的選擇上我首先就選擇了麥克納姆輪,因?yàn)辂溈思{姆輪工藝已經(jīng)比較成熟,而且能全方位移動(dòng)。然后對(duì)其原理進(jìn)行了闡述。接著是機(jī)器人的結(jié)構(gòu)的設(shè)計(jì)。首先設(shè)計(jì)重要的腿部結(jié)構(gòu),然后是主體部分,這個(gè)過(guò)程都是運(yùn)用UG7.5來(lái)完成的。之后對(duì)電機(jī)類型進(jìn)行選擇,最終因?yàn)槠鋬?yōu)秀的功能選擇了舵機(jī)。在對(duì)控制系統(tǒng)的設(shè)計(jì)中,最終簡(jiǎn)單的設(shè)計(jì)了控制系統(tǒng)的框架,并沒(méi)有對(duì)內(nèi)部指令等進(jìn)行編輯。
編輯:黃飛



















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論