市面上 5 款激光雷達,來看看到底誰才能代表自動駕駛的未來?iDAR(AEye)iDAR(Intelligent Detection and Ranging)是 AEye 公司的產品,它是一種新型
2018-07-26 20:45:02
發生。這些程序校準磁力計、雙天線安裝對準誤差、IMU安裝對準誤差,還校準車輛振動水平以便進行靜態期檢測。該系統可在兩種硬件配置中工作。第一種配置包括兩個FOG(檢測航向和俯仰角)、一個MEMS陀螺儀
2018-10-18 10:55:34
原理的激光雷達來說影響更加嚴重。因為需要能夠區分出環境光和激光信號,就需要有更優異的處理算法和光學調校。 傳統受限于原理,三角測距法的激光雷達都會給大家一種完全無法抗擊環境光照的印象,更不提在室外可以工作
2018-02-02 14:06:27
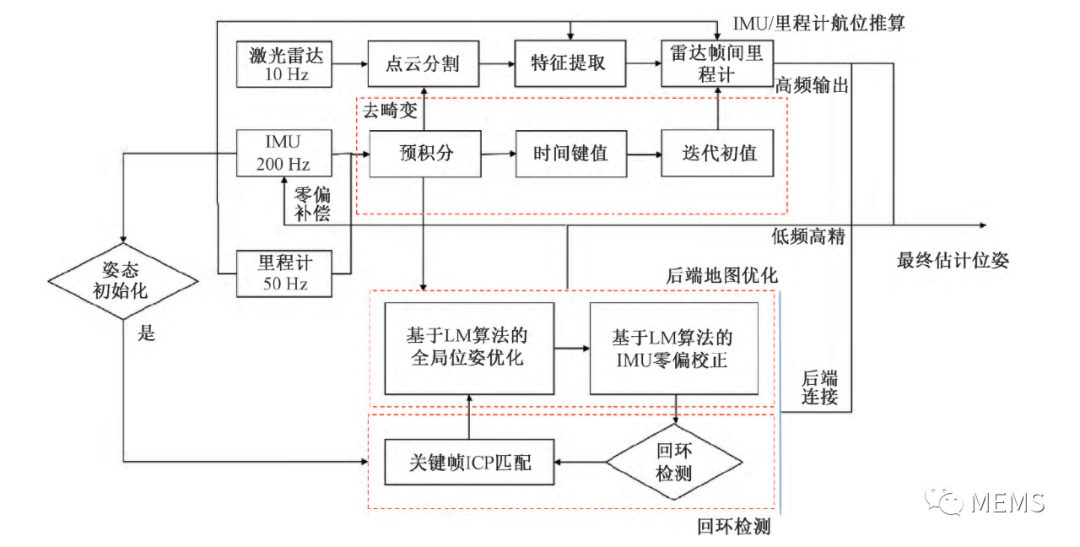
的多元組合態勢。車載激光雷達應用算法可分為三類:點云分割算法、目標跟蹤與識別算法、即時定位與地圖構建算法(simultaneous localization and mapping,SLAM)。
各類
2023-09-19 13:35:01
主要內容本文提出了一種不依賴于棋盤格等輔助標定物體,實現像素級相機和激光雷達自動標定的方法。方法直接從點云中提取3D邊特征,一避免遮擋問題,并且使用了精確度更高的深度連續邊。文中首先指出:以下四種
2021-09-01 07:42:19
【作者】:向禮;劉雨;蘇寶庫;【來源】:《控制理論與應用》2010年02期【摘要】:為改善傳統粒子濾波中的樣本退化和樣本枯竭問題,提出一種新的粒子濾波算法.在重要性采樣中,利用最新測量值,結合差分
2010-04-24 09:04:09
第一章導航定位技術分類 1. 定位技術分類1.1 基于相對測量的定位(航位推算)1.2 基于絕對測量的定位1.3 組合定位1. 定位技術分類 1.1 基于相對測量的定位(航位推算) (1)輪式里程計
2021-09-01 07:15:25
`我們已經對單線激光雷達司空見慣,其旋轉線掃的測量方式導致造成壽命問題和價格居高不下。 因此,北醒研發了CE30,它是一款具有大視場角的固態激光雷達。它可同時輸出132°水平視場、9度垂直視場范圍內
2018-01-11 09:21:13
想了解行業國內做固態激光雷達的廠家,激光雷達里面是怎么樣的啊
2021-01-17 15:29:39
、速度等特征量的雷達系統,正是這樣的一個系統,成為了無人駕駛汽車的靈魂所在。激光雷達成名于2012年谷歌無人駕駛汽車的橫空出世,當時頭頂“大鐵桶”的谷歌無人駕駛汽車在全世界范圍內引起轟動,“大鐵桶”也
2017-10-20 15:49:06
激光雷達實際上是一種工作在光學波段(特殊波段)的雷達,它的優點非常明顯:1、具有極高的分辨率:激光雷達工作于光學波段,頻率比微波高2~3個數量級以上,因此,與微波雷達相比,激光雷達具有極高的距離
2017-09-19 15:51:15
最為重要的,目前,主流的用于周圍環境感測的傳感器有激光雷達、毫米波雷達、視覺傳感器三種。1.自適應巡航控制系統 Adaptive Cruise Control(ACC)自適應巡航控制系統是一種智能化
2017-10-18 17:18:24
`科技的進步日新月異,要數在汽車圈子里最火熱的詞匯,自動駕駛輔助系統一定是位居榜單前列的,而自動駕駛中核心的硬件之一—激光雷達,也是屢屢被各家車企送上熱搜榜單,成為了業界內關注的重心。激光雷達被
2021-03-18 11:14:17
在量產的也是這種機械式的激光雷達。混合固態也是機械式旋轉類的激光雷達。另外一種是 MEMS。基于 MEMS 的掃描式雷達目前屬于在研狀態,它的原理是通過 MEMS 掃描鏡來改變光路。還有一種是相控陣
2017-09-08 17:24:48
點擊上方“AI算法修煉營”,選擇“星標”公眾號精選作品,第一時間送達這篇文章是激光雷達點云數據分割算法的嵌入式平臺上的部署實現。主要的創新點有兩點:一是利用多路分支采用不同分辨率輸入后再...
2021-12-21 08:28:22
激光信號,就需要有更優異的處理算法和光學調校。 傳統受限于原理,三角測距法的激光雷達都會給大家一種完全無法抗擊環境光照的印象,更不提在室外可以工作的可能性了。 不過,對于RPLIDAR而言并不是如此
2018-02-07 13:40:27
Detection and Ranging,即「激光的探測和測距」。這是在 2004 年提出的定義,更符合激光雷達的概念。 激光雷達實際上是一種工作在光學波段(特殊波段)的雷達,它的優點非常明顯: 1
2020-07-14 07:56:45
比對上一幀和下一幀環境的變化可以較為容易的探測出周圍的車輛和行人。2.SLAM加強定位。激光雷達另一大特性是同步建圖(SLAM),實時得到的全局地圖,通過與高精度地圖中特征物的比對,可以實現導航及加強
2017-10-16 16:31:32
激光雷達距離像背景抑制算法研究相干激光成像雷達距離像處理的一個重要內容就是進行背景抑制。利用原始強度像的均值信息進行距離像的背景抑制因為強度像受到噪聲影響而效果不佳,改進算法加入了強度像的噪聲濾除
2009-08-08 09:40:21
簡單的3D雷達,獲取三維數據呢?目前市面上主流的有2種方式:1、采用線狀激光器,將原先的一個點變成一條線型光;2、使用一個2D激光雷達掃描,同時在另一個軸進行旋轉,從而掃描出3D信息;圖片來源于網絡
2018-05-11 15:33:44
的。Scanse的一款價值250美元的名為“sweep”的二維激光雷達掃描器可在戶外使用,并專為移動、低功耗應用而設計。它只用了競爭對手近四分之一的成本,這將給這類傳感器帶來全新的應用(我們在很多其他類型
2017-09-26 14:30:16
4個開關量輸入信號組合選取15組區域組(FieldSet)中的任一個作為當前工作區域組,適應復雜多變的應用環境,還可以輸出點云數據。 ■鐳神激光雷達+SLAM算法可實現的五大功能 激光雷達為主
2018-11-09 15:59:01
有道友能介紹介紹EAI激光雷達嗎?
2020-12-31 17:48:20
FMCW激光雷達與dTOF激光雷達的區別在哪?
2021-07-23 13:22:37
污染氣體的手段,已成為激光雷達研究中的最重要的課題,因為它關系到我國社會能否持續發展的重大問題。激光雷達是一種主動式的現代光學遙感設備,其基本工作原理與普通雷達類似:由發射系統發送一個信號與目標物質
2016-05-23 14:44:42
TOF 方案激光雷達是激光雷達新一代技術方案,本產品解決了如市場三角測試法等產品組裝問題難,價格成本高等問題,目前提供面陣及單光子技術,基于COM產品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03:35
STM32 Cube MX學習筆記——TOF 高速單線激光雷達 L10_串口中斷通信1. TOF 高速單線激光雷達 L102. STM32 Cube MX配置代碼配置1. TOF 高速單線激光雷達
2022-03-02 07:19:03
度較慢,而且測量精度對啁啾時調制時的線性度程度非常敏感。雖然設計一種功能完善的激光雷達系統具有挑戰性,但這些挑戰都不是不可克服的。隨著研究的繼續,我們越來越接近于大多數汽車生產結束后就能夠完全自動化的時代。
2018-09-10 14:10:45
反射光,采用相應的算法對多次發射光進行處理,就是多次回波技術。 多次回波技術,在很多激光雷達中都有應用。最常見的處理方法就是采用最后一次回波,如果在雨霧、灰塵環境中,激光可以穿透雨霧、灰塵,并最終打到
2020-09-24 14:17:56
系統的信號精度降低甚至丟失衛星信號時,不借助里程計信息,SKM-4DU利用純慣性導航技術,也可在較長時間內單獨對汽車載體進行高精度定位、測速和測姿。未來,SKYLAB將繼續致力于高性能、高精度定位模塊
2017-10-12 18:13:02
激光雷達在一定范圍之內會糾正里程計的誤差,但在某些特殊環境下(如雷達掃描的有效點較少時),里程計的準備度還是會影響定位的效果。 因此,對于需要自主定位導航的服務機器人而言,電機里程計的精準度,往往是決定
2018-03-28 15:48:15
誰能幫幫小弟我! 十分感謝! 要求:用c語言編寫一個自行車速度計和里程計! 基于芯片AT89C51,用霍爾元件測速度!用lcd1602顯示最好!不要求報警!能有一個開關暫停顯示!小弟的qq1252295329!!求大神高手指點一個
2013-04-16 20:01:46
``一年一度的國際消費類電子產品展覽會(CES)已經完滿收官,短短的幾天時間里,我們見識了Intel無人飛機燈光秀、百度無人車、移動行李箱等眾多“黑科技”。而北醒不僅展示了性能卓越的固態激光雷達,在
2018-01-25 09:38:47
`一年一度的國際消費類電子產品展覽會(CES)已經完滿收官,短短的幾天時間里,我們見識了Intel無人飛機燈光秀、百度無人車、移動行李箱等眾多“黑科技”。而北醒不僅展示了性能卓越的固態激光雷達,在
2018-01-26 09:19:09
``一年一度的國際消費類電子產品展覽會(CES)已經完滿收官,短短的幾天時間里,我們見識了Intel無人飛機燈光秀、百度無人車、移動行李箱等眾多“黑科技”。而北醒不僅展示了性能卓越的固態激光雷達,在
2018-01-25 09:36:04
達22m的量程和更為穩定的測距性能。 北醒結合創新的生產工藝和軟、硬件多項優化,使得激光雷達真正達到了消費級,可應用到更廣泛的領域。 ? 遠、準、穩 ? 最遠測距可達22m, 高頻率的實時測量,具有
2018-01-04 10:21:23
圍繞激光雷達點云算法模塊,向合作伙伴提供包括激光雷達傳感器硬件和算法一體的整體解決方案,與各領域企業共同作戰。三個季度以來,我們逐步向普羅米修斯計劃內部合作伙伴以 SDK 的方式開放
2017-12-15 14:20:48
`我們已經對單線激光雷達司空見慣,其旋轉線掃的測量方式導致造成壽命問題和價格居高不下。 因此,北醒研發了CE30,它是一款具有大視場角的固態激光雷達。它可同時輸出132°水平視場、9度垂直視場范圍內
2018-01-04 10:18:39
``一年一度的國際消費類電子產品展覽會(CES)已經完滿收官,短短的幾天時間里,我們見識了Intel無人飛機燈光秀、百度無人車、移動行李箱等眾多“黑科技”。而北醒不僅展示了性能卓越的固態激光雷達,在
2018-01-25 09:41:33
來檢測物體。激光雷達系統的視場 (FOV) 決定了激光雷達能夠捕捉到的圖像的寬度,因此該視場對于自動駕駛決策算法十分重要。擴大FOV的方法有很多種,其中之一就是利用機械掃描,使用電機幫助實現360度
2022-11-03 07:12:38
里程計工作原理是什么?汽車里程計的受擾現象有哪些?
2021-05-19 07:26:30
視覺慣性里程計 綜述 VIO Visual Inertial Odometry msckf ROVIO ssf msf okvis ORB-VINS VINS-Mono gtsam目錄里程計
2021-07-27 07:21:50
1、概述由于課題要求,需要設計一款適合于果園應用的激光雷達。因此采用單線掃描激光雷達和角度傳感器來設計能采集二維數據的激光雷達。關于數據的轉化的理論,我們可以查閱相關文獻。在此,只講基本的構造和程序
2021-11-12 08:15:02
單線激光雷達特點:結構簡單、掃描速度快、分辨率高、可靠性高、成本低。單線激光雷達實際上就是一個高同頻激光脈沖掃描儀,加上一個一維旋轉掃描。單線激光雷達雖然原理簡單但是可以有效、高頻的測試物體的距離
2017-09-25 11:30:10
,實現自主避障和導航。在這款盲人拐杖里,斯坦福的學生團隊加入了以下傳感器,用來協助盲人拐杖的運行:激光雷達:幫助盲人探測周圍物體的形狀和環境GPS:在室外的時候可以知道具體的位置IMU:知道盲人走路
2021-11-12 14:12:43
`TFmini是北醒在推進激光雷達低成本化進程中里程碑式的一步。 產品配以獨特的光學、結構和電子設計,使得產品具有低成本、小體積和低功耗三大優點。 產品內置室內外各應用環境的適配算法,可保證產品在
2018-01-04 10:22:39
`TFmini是北醒在推進激光雷達低成本化進程中里程碑式的一步。 產品配以獨特的光學、結構和電子設計,使得產品具有低成本、小體積和低功耗三大優點。 產品內置室內外各應用環境的適配算法,可保證產品在
2018-01-11 09:22:38
SKM-4DX衛星+慣性導航模塊基于卡爾曼濾波算法融合兩種導航算法,對衛星導航的定位精度進行智能識別,如果衛星導航精度較好,則進行組合導航;一旦發現衛星導航信號非常差甚至丟失信號,則進行純慣性導航
2020-08-13 01:29:45
集成正交安裝的高精度MEMS陀螺儀和正交安裝的高精度MEMS加速度計,內置全溫零位誤差補償、安裝正交誤差補償、非線性誤差補償和g值敏感誤差補償等多種校準算法,采用雙排14針插針通過UART TTL通訊
2024-01-18 13:46:16
一.機器人導航算法工程師崗位職責:1. 負責機器人視覺或激光雷達的SLAM算法的研發和優化;2. 負責機器人自主導航定位算法的研發,主要包括基于深度相機或激光雷達、IMU、里程計等多傳感器信息融合
2020-06-08 05:06:44
5:ouster激光雷達OS-1-64激光雷達在安防監控領域有其獨特的魅力與優勢,但僅僅依靠一種技術完成安防監控系統是不可能的,在未來激光雷達必將與相機、GPS、移動巡檢機器人等多行業技術融合
2020-02-29 17:03:44
效果 但跟無人駕駛相比,激光雷達在機器人身上好像更能快速落地:精度要求不那么高,成本更低、允許一定差錯…… 激光雷達的應用,可以幫助機器人在未知環境中了解周邊地圖信息,為后續定位導航,甚至是人機
2019-02-15 15:12:28
、緊急剎車、車距保持等功能。 綜述根據上面的介紹進行簡單的總結,三種雷達各自的特點及優劣勢如下: 制式參數超聲波雷達 激光雷達毫米波雷達 最大距離近遠較遠距離、角度分辨率一般 很高 高環境適應性易受
2019-09-19 09:05:02
的一部分。鑒于目前激光雷達的高成本,攝像頭配合高精度地圖是另一種較低成本的技術路線。除了與高精度地圖配合為自動駕駛提供定位服務,攝像頭還可以在地圖采集過程中作為低成本且數據傳輸量小(攝像頭捕捉的是小尺寸
2017-09-06 11:36:58
自動導航車(Automatic Guided Vehicle,即AGV)領域的固態激光雷達CE30。對比傳統的機械式激光雷達,激光雷達是通過機械轉軸的高速旋轉來完成四周環境的掃描。固態激光雷達顧名思義
2017-12-07 14:47:45
消耗是巨大的,雖然并沒有達到像訓練神經網絡動用服務器集群那種地步,但傳統上需要PC級別的處理器。除配備激光雷達外,還需要機器人具有IMU(慣性測量單元)、里程計來為激光雷達提供輔助數據,否則SLAM系統
2017-06-30 15:05:26
iphone12這個亮點不在5G上面,畢竟國內的一些廠商早就已配備,也不在顏色,重點在于配備了一顆激光雷達!先說一下這個激光雷達帶來的用途,最直接的就是能夠快速精準對焦,即使在晚上也能夠很好實現
2021-07-22 09:12:51
空間激光雷達最小接收光功率的計算【摘要】采用信號檢測的統計思想,在詳細分析雷達接收機各種噪聲大小與概率分布、計算空間背景光大小和光譜特性的前提下,基于信號檢測理論中的虛警概率和發現概率提出了一種能
2009-05-15 01:20:13
#什么是激光雷達?如今,"激光雷達"已不是什么陌生的概念了,特別是隨著自動駕駛的熱潮,它也備受矚目。 激光雷達實際上是一種工作在光學波段(近紅外)的雷達,最早對它的定義
2018-09-10 14:21:58
,通常由陀螺儀、加速計和算法處理單元組成,通過對加速度和旋轉角度的測量得出自體的運動軌跡,在導航中有著很重要的應用價值。我們把傳統的 IMU 和與車身、GPS 等信息融合的算法組合在一起的系統稱為廣義
2018-10-30 11:51:34
SLAM 前端里程計做累加,可以配合高精地圖的圖匹配,做類似后端回環優化的方式,將GPS、激光雷達及已知地圖進行融合定位。3. 自動駕駛多對雙目視覺攝像頭SLAM方案這種方案成本低,更加考究的是算法,有很少
2019-05-09 04:41:09
傳感器技術1.3.1 攝像頭1.3.2 毫米波雷達1.3.3 激光雷達1.3.4 超聲波雷達1.4 導航與定位技術1.4.1 衛星定位系統和捷聯慣導航系統的組合定位技術1.4.2 激光雷達點云和高精地圖的匹配定位技術1.4.3 計算機視覺里程算法的定位
2021-08-30 08:36:23
稱為Class1,Class2, Class3A, Class3B, Class4。現在市面上常見的激光雷達基本上都達到IEC標準的Class1等級,即在可預見的工作條件下是一種安全設備,不會對人體產生任何損害
2018-09-10 16:32:46
機器人大腦處理并輸出反饋和執行動作。本章節涉及到的傳感器有激光雷達、IMU、輪式里程計、麥克風、音響、攝像頭,和用于處理信息的嵌入式主板。關于傳感器的ROS驅動程序開發和在機器人上的使用在后面的章節會展開,...
2021-12-17 06:58:27
請問激光雷達和激光掃描儀的具體區別在哪兒?
2022-05-13 11:05:19
請問如何理解SLAM用到的傳感器輪式里程計IMU、雷達、相機的工作原理?
2021-10-09 08:52:46
什么是聲級計?聲級計有哪些特性?怎樣去設計一種基于MEMS的聲級計?
2021-07-02 06:54:54
激光雷達是如何產生的?激光雷達在自動駕駛領域有什么作用?
2021-06-17 07:31:54
【作者】:白俊卿;衛育新;【來源】:《電子設計工程》2010年02期【摘要】:從工程實用和維護的角度出發,提出一種針對于車載組合導航系統的在線標定算法。該算法使用卡爾曼濾波作為估計工具,通過趨于一
2010-04-24 09:31:29
的環境感知系統一般由多個傳感器組成,包括激光雷達、毫米波雷達、攝像頭、GPS 等。其中,攝像頭、毫米波雷達、激光雷達是無人駕駛汽車中最常用的三種環境感知解決方案。 攝像頭的優點是成本低廉,圖像算法
2017-08-21 14:54:32
,海洋激光雷達作為一種先進的海洋探索與監測手段,已經成為主流。 3D打印——扮演測量、監控等角色在3D打印里面也會有用到激光雷達的地方,如之前很火的Printoptical3D打印技術本質上是一種“從
2018-12-10 14:55:39
請問各位大咖,激光雷達的測量距離能到多少?
2022-10-05 03:18:49
四軸飛行器組合導航非線性濾波算法,四軸飛行器組合導航非線性濾波算法。
2016-05-16 11:56:08 11
11 針對三點和四點爬山算法對隨機置換盒(S盒)的非線性度進行優化時計算量大及效率低的問題,提出了一種組合式爬山算法(CHC)。該算法把交換S盒兩個輸出數據的行為定義為一個交換元,利用加權擇優函數,篩選
2018-01-05 16:57:050 移動底座和激光雷達與Cortex-A53平臺都是通過串口來通信的。在基于Cortex-A53處理器的平臺上處理激光雷達的掃描數據以及底座中采集的里程計數據,結合激光雷達的數據和里程計數據實現機器人的定位,并在定位的基礎上利用雷達掃描數據實現二維地圖構建。
2018-03-13 09:15:32 8952
8952 
MEMS微鏡已經存在多年,甚至在視頻投影機這樣的日常設備中得到了應用。當今MEMS微鏡的問題在于很難將其用于遠距離激光雷達。遠距離探測和大視場角是激光雷達的關鍵性能指標。典型的MEMS微鏡的鏡面尺寸小,偏轉角度較小,因此無法達到理想的探測距離和視場角。
2019-04-16 11:33:4414082 在導航系統中,里程計(odometry)是一種利用致動器的移動數據來估算機器人位置隨時間改變量的方法。例如,測量輪子轉動的旋轉編碼器設備。里程計總是會遇到精度問題,例如輪子的打滑就會導致產生機器人移動的距離與輪子的旋轉圈數不一致的問題。
2019-08-08 14:21:1325317 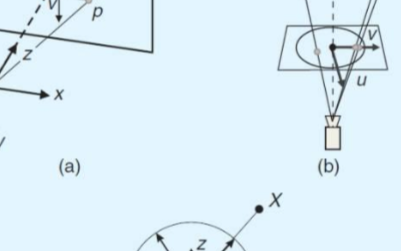
激光雷達是集激光、全球定位系統(GPS)、和IMU(慣性測量裝置)三種技術于一身的系統,相比普通雷達,激光雷達具有分辨率高,隱蔽性好、抗干擾能力更強等優勢
2019-09-26 09:42:157539 據麥姆斯咨詢介紹,激光雷達(LiDAR)是一項使用激光實現測距并創建深度圖的技術,但給人以昂貴且笨重的印象。MEMS微鏡會如何幫助降低激光雷達成本?激光雷達如何實現物聯網解決方案?下文將給予相關
2020-11-09 14:25:084729 激光雷達是集激光、全球定位系統(GPS)、和IMU(慣性測量裝置)三種技術于一身的系統,相比普通雷達,激光雷達具有分辨率高,隱蔽性好、抗干擾能力更強等優勢。隨著科技的不斷發展,激光雷達的應用越來越
2021-03-30 16:37:008082 
激光雷達是什么? 激光雷達(英文:Lidar),激光雷達是集激光、全球定位系統(GPS)、和IMU(慣性測量裝置)三種技術于一身的系統,相比普通雷達,激光雷達具有分辨率高,隱蔽性好、抗干擾能力更強
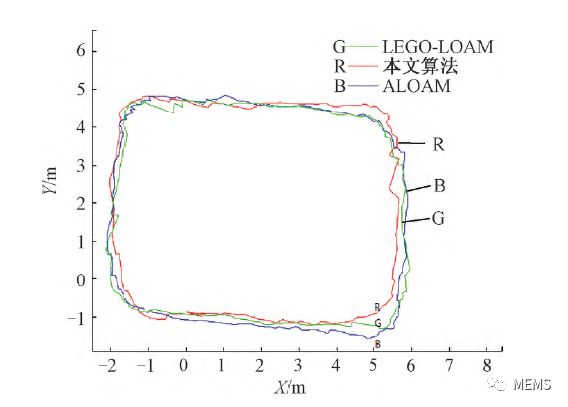
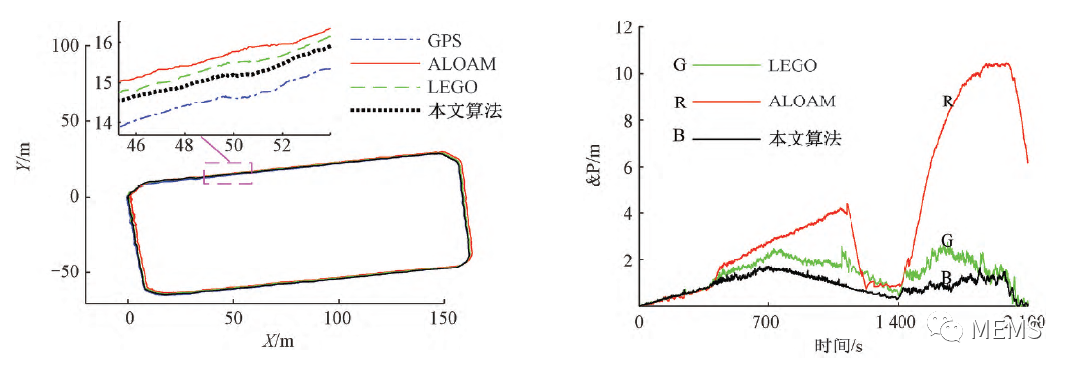
2022-06-20 16:53:4122721 從全稱上可以看出,該算法是一個緊耦合的雷達慣導里程計(Tightly-coupled Lidar Inertial Odometry),借助的手段就是利用GT-SAM庫中的方法。
2022-09-14 10:11:011405 LIO-SAM 提出了一個利用GT-SAM的緊耦合激光雷達慣導里程計的框架。實現了高精度、實時的移動機器人的軌跡估計和建圖。
2022-10-31 09:25:491959 全球定位系統(GPS)作為一種機器人常用定位方式,受制于天氣、無線電、遮擋等環境因素,導致導航系統實時性與可靠性難以保證,環境的未知以及機器人運動的不確定性會對SLAM系統的魯棒性與穩定性提出更高要求,為了解決這一問題,有必要進一步研究SLAM以及慣性導航技術。
2022-11-03 10:09:511419 方案(ORB SLAM)、基于激光雷達的里程計方案(Hector SLAM)、基于IMU的里程計方案,以及多傳感器融合的方案。
2023-04-19 10:17:521064 提出一種新型的視覺-LiDAR里程計和建圖系統SDV-LOAM,能夠綜合利用相機和激光雷達的信息,實現高效、高精度的姿態估計和實時建圖,且性能優于現有的相機和激光雷達系統。
2023-05-15 16:17:21433 
固態激光雷達通常分為哪三種類型?mems固態激光雷達? 固態激光雷達是一種基于激光技術的高精度測量儀器,它利用激光器發射激光束,并通過接收器接收反射回來的激光信號,根據信號的時間差來計算出目標的距離
2023-08-22 16:45:361610 只發射一條激光束,而多線激光雷達則同時發射多條激光束。單線激光雷達通常使用旋轉鏡和激光二極管的組合來掃描周圍環境。它通過旋轉鏡的旋轉來改變激光束的方向,并通過激光二極管發射脈沖激光。而多線激光雷達則可以通過多個激
2023-12-07 15:48:331851 激光雷達導航是通過360度旋轉雷達對周圍10米以內平面空間進行掃描,并生成平面地圖;根據雷達掃描出來的平面地圖結合碰撞、沿墻等不同的傳感器取得的數據來進行
2021-11-17 10:10:25
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論