 電子發燒友App
電子發燒友App


根據國家犯罪記錄局(NCRB)的數據,據估計,從2010年到2014年,印度因火災事故造成超過1.2萬人死亡。盡管對火災事故采取了很多預防措施,但這些自然/人為災難確實時不時發生。在發生火災時,為了救人和滅火,我們被迫使用不安全的人力資源。隨著技術的進步,特別是在機器人技術方面,很有可能用機器人代替人類來滅火。這將提高消防員的效率,并防止他們冒著生命危險。今天我們將使用Arduino構建一個消防機器人,它將自動感應火災并啟動水泵
在這個項目中,我們將學習如何使用Arduino構建一個簡單的機器人,它可以向火移動并在火周圍抽水來撲滅火。這是一個非常簡單的機器人,可以教我們機器人的基本概念;一旦您了解了以下基礎知識,您就可以構建更復雜的機器人。所以讓我們開始吧...
所需材料:
Arduino UNO
火災傳感器或火焰傳感器(3 個)
伺服電機 (SG90)
L293D電機驅動模塊
微型直流潛水泵
小型面包板
帶電機(2)和輪子(2)的機器人底盤(任何類型)
一個小罐頭
連接線
消防機器人工作理念:
該項目的主要大腦是Arduino,但為了感知火災,我們使用如下所示的火災傳感器模塊(火焰傳感器)。
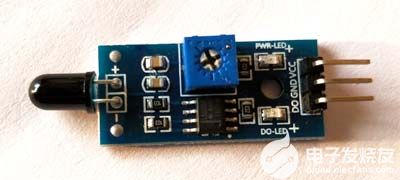
如您所見,這些傳感器有一個紅外接收器(光電二極管),用于檢測火災。這怎么可能?當火燃燒時,它會發出少量的紅外線,這種光會被傳感器模塊上的紅外接收器接收。然后,我們使用運算放大器檢查紅外接收器兩端的電壓變化,這樣,如果檢測到火災,輸出引腳(DO)將給出0V(LOW),如果沒有火災,輸出引腳將為5V(HIGH)。
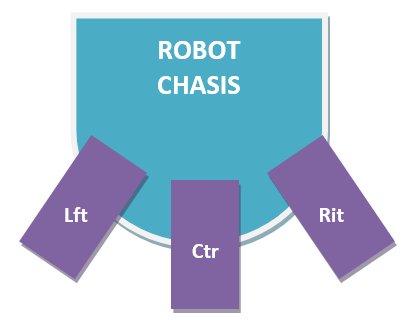
因此,我們在機器人的三個方向上放置了三個這樣的傳感器,以感知火在哪個方向燃燒。
我們檢測火災方向,我們可以通過L293D 模塊驅動電機來使用電機在火災附近移動。當靠近火災時,我們必須用水將其撲滅。使用一個小容器我們可以攜帶水,容器中還放置了一個5V泵,整個容器放置在伺服電機的頂部,以便我們可以控制必須噴水的方向。現在讓我們繼續連接
電路圖:
下面給出了該消防機器人的完整電路圖
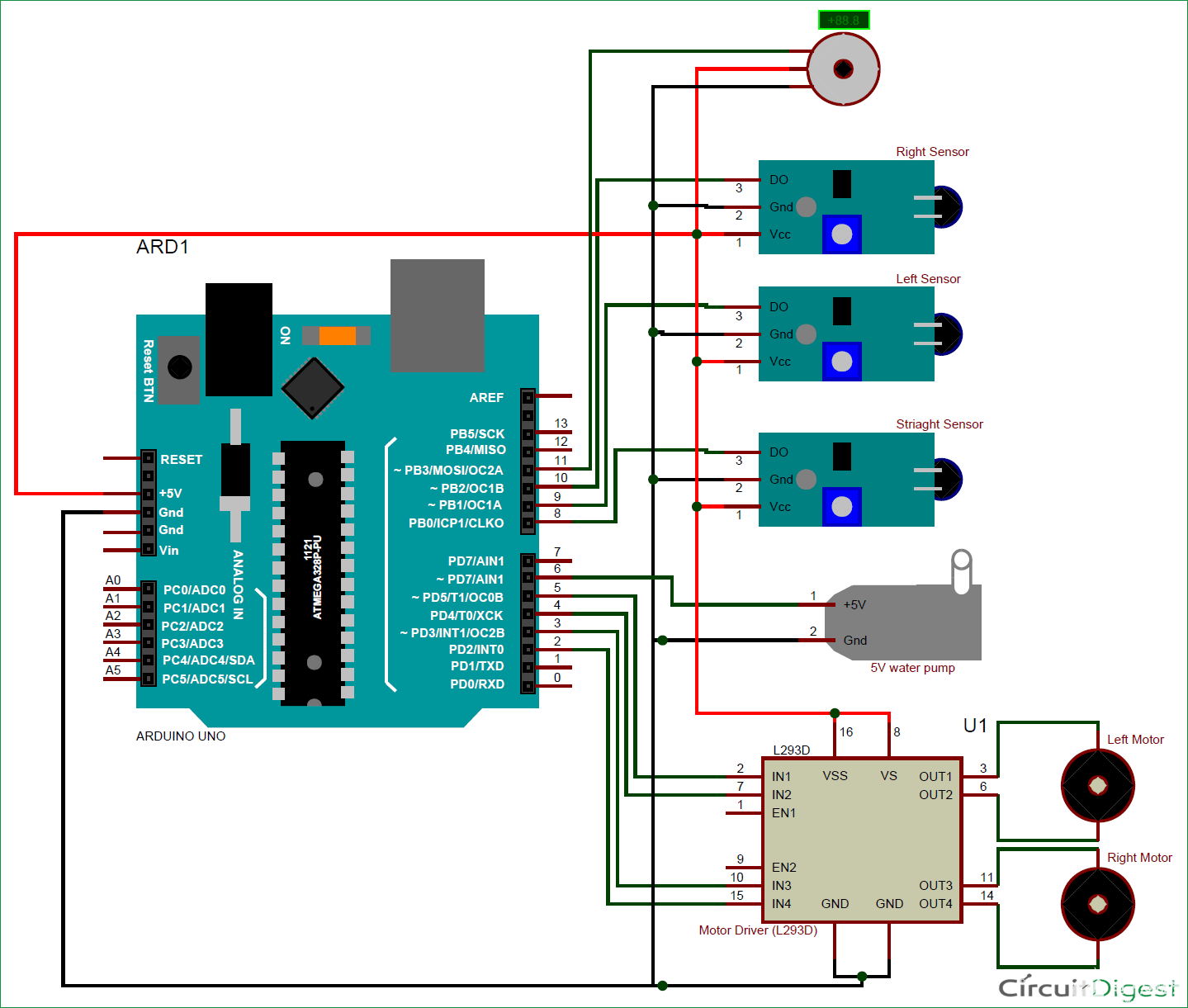
您可以連接所有顯示的連接以上傳程序以檢查工作情況,也可以完全組裝機器人,然后繼續連接。這兩種方式的連接都非常簡單,您應該能夠正確處理。
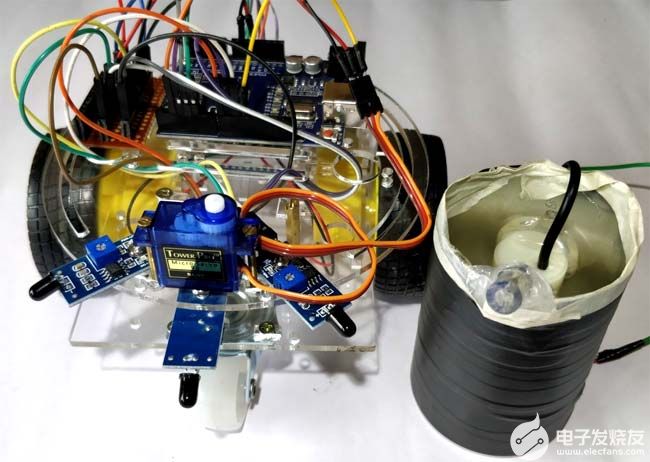
根據您使用的機器人底盤,您可能無法使用我正在使用的相同類型的容器。在這種情況下,請發揮自己的創造力來設置泵送系統。但是,代碼將保持不變。我用一個小鋁罐(冷飲罐)將泵放在里面,然后在里面倒水。然后,我將整個罐子組裝在伺服電機的頂部,以控制水的方向。我的機器人組裝后看起來像這樣。
?

?

如您所見,我已使用膠水將伺服翅片固定在容器底部,并使用螺母和螺栓將伺服電機固定在底盤上。我們可以簡單地將容器放在電機頂部,然后觸發其中的泵通過管子向外泵水。然后可以使用伺服器旋轉整個容器以控制水的方向。
對 Arduino 進行編程:
準備好硬件后,您可以上傳Arduino代碼以進行某些操作。本頁末尾給出了完整的程序。但是,我在這里進一步解釋了一些重要的零碎內容。
眾所周知,火災傳感器在發生火災時將輸出高電平,在發生火災時將輸出低電平。因此,我們必須繼續檢查這些傳感器是否發生火災。如果沒有火災,我們要求電機保持停止,使所有引腳高,如下所示
if (digitalRead(Left_S) ==1 && digitalRead(Right_S)==1 && digitalRead(Forward_S) ==1) //If Fire not detected all sensors are zero
{
//Do not move the robot
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
}
同樣,如果發生火災,我們可以通過旋轉相應的電機來要求機器人向該方向移動。一旦它到達火場,左右傳感器將不會檢測到火勢,因為它會直立在火場前方。現在我們使用名為“fire”的變量來執行函數來熄火。
else if (digitalRead(Forward_S) ==0) //If Fire is straight ahead
{
//Move the robot forward
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
fire = true;
}
一旦變量火災變為真,消防機器人arduino代碼將執行put_off_fire功能,直到火災被撲滅。這是使用下面的代碼完成的。
while (fire == true)
{
put_off_fire();
}
在 put_off_fire() 中,我們只需要通過使所有引腳變高來停止機器人。然后打開泵將水推出容器,同時我們還可以使用伺服電機旋轉容器,使水均勻地分開。這是使用下面的代碼完成的
void put_off_fire()
{
delay (500);
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);?
digitalWrite(pump, HIGH); delay(500);
for (pos = 50; pos <= 130; pos += 1) {
myservo.write(pos);
delay(10);?
}
for (pos = 130; pos >= 50; pos -= 1) {
myservo.write(pos);
delay(10);
}
digitalWrite(pump,LOW);
myservo.write(90);
fire=false;
}
消防機器人工作:
建議分步檢查機器人的輸出,而不是第一次一起運行。您可以將機器人構建到伺服電機上,并檢查它是否能夠成功跟蹤火災。然后您可以檢查泵和伺服電機是否正常工作。一旦一切按預期工作,您就可以運行下面的程序并享受消防機器人的完整工作。

機器人的完整工作可以在下面的視頻中找到。可以檢測到火災的最大距離取決于火災的大小,對于小火柴棍來說,距離相對較小。您還可以使用模塊頂部的電位計來控制機器人的靈敏度。我用移動電源為機器人供電,你可以使用電池,甚至可以用12V電池供電。
/*------ Arduino Fire Fighting Robot Code----- */
#include
Servo myservo;
int pos = 0;?
boolean fire = false;
/*-------defining Inputs------*/
#define Left_S 9 // left sensor
#define Right_S 10 // right sensor
#define Forward_S 8 //forward sensor
/*-------defining Outputs------*/
#define LM1 2 // left motor
#define LM2 3 // left motor
#define RM1 4 // right motor
#define RM2 5 // right motor
#define pump 6
void setup()
{
pinMode(Left_S, INPUT);
pinMode(Right_S, INPUT);
pinMode(Forward_S, INPUT);
pinMode(LM1, OUTPUT);
pinMode(LM2, OUTPUT);
pinMode(RM1, OUTPUT);
pinMode(RM2, OUTPUT);
pinMode(pump, OUTPUT);
myservo.attach(11);
myservo.write(90);?
}
void put_off_fire()
{
delay (500);
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
digitalWrite(pump, HIGH); delay(500);
for (pos = 50; pos <= 130; pos += 1) {?
myservo.write(pos);?
delay(10);?
}
for (pos = 130; pos >= 50; pos -= 1) {?
myservo.write(pos);?
delay(10);
}
digitalWrite(pump,LOW);
myservo.write(90);
fire=false;
}
void loop()
{
myservo.write(90); //Sweep_Servo();?
if (digitalRead(Left_S) ==1 && digitalRead(Right_S)==1 && digitalRead(Forward_S) ==1) //If Fire not detected all sensors are zero
{
//Do not move the robot
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
}
else if (digitalRead(Forward_S) ==0) //If Fire is straight ahead
{
//Move the robot forward
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
fire = true;
}
else if (digitalRead(Left_S) ==0) //If Fire is to the left
{
//Move the robot left
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, HIGH);
}
else if (digitalRead(Right_S) ==0) //If Fire is to the right
{
//Move the robot right
digitalWrite(LM1, HIGH);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
delay(300); //Slow down the speed of robot
while (fire == true)
{
put_off_fire();
}
}
?
?







 工商網監
工商網監
評論