 電子發(fā)燒友App
電子發(fā)燒友App


??▍?一、研究背景與研究意義
? 1.1?智能制造與工業(yè)機(jī)器人
? 智能制造是高端裝備制造業(yè)發(fā)展的必然趨勢(shì),也是促進(jìn)我國從制造大國向制造強(qiáng)國轉(zhuǎn)變的必然之路。談及智能制造就繞不開工業(yè)機(jī)器人,作為我國智能制造發(fā)展的重要內(nèi)容之一,工業(yè)機(jī)器人也是推動(dòng)中國制造向機(jī)械化、自動(dòng)化、集成化與智能化發(fā)展的關(guān)鍵。
? 1.2 工業(yè)機(jī)器人:制造業(yè)再認(rèn)識(shí)
? 據(jù)2016年美國總統(tǒng)經(jīng)濟(jì)報(bào)告,在1993年到2007年之間,機(jī)器人對(duì)于勞動(dòng)生產(chǎn)力的增長(zhǎng)貢獻(xiàn)了0.36%,大概占到了這段時(shí)期勞動(dòng)力增長(zhǎng)的16%,這種效應(yīng)與蒸汽機(jī)出現(xiàn)時(shí)對(duì)于勞動(dòng)生產(chǎn)力的影響是同一個(gè)級(jí)數(shù)。機(jī)器人成為工業(yè)主要的推動(dòng)力之一,同時(shí)給制造業(yè)帶來了再認(rèn)識(shí):“制造業(yè)革命”給機(jī)器人帶來了巨大市場(chǎng);全自動(dòng)化只占制造業(yè)的很小一部分;絕大多數(shù)都是由人承擔(dān)。
? 面對(duì)著用工難、招工難的困境,在中國機(jī)器人熱度一年比一年高。這也是世界各國,包括美國、德國、歐盟、日本都把機(jī)器人作為主要發(fā)展方向的原因。
? 1.3?機(jī)器人創(chuàng)新設(shè)計(jì)的七個(gè)方面
? 為利用好、做好機(jī)器人,使其用于各行各業(yè),機(jī)器人的設(shè)計(jì)成為了關(guān)鍵。工業(yè)機(jī)器人的發(fā)展離不開設(shè)計(jì),更離不開全生命周期的創(chuàng)新設(shè)計(jì)涉及機(jī)器人產(chǎn)品的需求、功能、結(jié)構(gòu)、物理、工藝、工業(yè)、市場(chǎng)等七個(gè)方面。
? 第一個(gè)方面,機(jī)器人的需求創(chuàng)新設(shè)計(jì)。過去被認(rèn)為機(jī)器人不可使用的領(lǐng)域,如今要實(shí)現(xiàn)用戶引導(dǎo)、創(chuàng)造需求。因此在需求創(chuàng)新設(shè)計(jì)上要包括創(chuàng)造、引導(dǎo)、定制機(jī)器人產(chǎn)品的需求。第二個(gè)方面,機(jī)器人的功能創(chuàng)新設(shè)計(jì)。在不同場(chǎng)合,機(jī)器人應(yīng)該要具有不同的功能,所以要擴(kuò)大、延伸、綜合機(jī)器人的產(chǎn)品功能。第三個(gè)方面,機(jī)器人的結(jié)構(gòu)創(chuàng)新設(shè)計(jì)。要實(shí)現(xiàn)功能、最好、最易實(shí)現(xiàn)的最簡(jiǎn)結(jié)構(gòu)。第四個(gè)方面,機(jī)器人的物理創(chuàng)新設(shè)計(jì)。保證產(chǎn)品功能的物理性能,包括強(qiáng)度、剛度、可靠性等。第五個(gè)方面,機(jī)器人的工藝創(chuàng)新設(shè)計(jì)。保證機(jī)器人能夠更加高效地完成成型、加工、裝配等工作。第六個(gè)方面,機(jī)器人的工業(yè)創(chuàng)新設(shè)計(jì)。使得機(jī)器人更加美觀,更加符合消費(fèi)者人機(jī)工程的需要。第七個(gè)方面,機(jī)器人市場(chǎng)的創(chuàng)新設(shè)計(jì)。包括機(jī)器人產(chǎn)品的消費(fèi)定位、客戶群等。
? 1.4 工業(yè)機(jī)器人設(shè)計(jì)與應(yīng)用現(xiàn)狀
? 我國工業(yè)機(jī)器人產(chǎn)業(yè)正處于高速發(fā)展時(shí)期,但目前國內(nèi)工業(yè)機(jī)器人設(shè)計(jì)與應(yīng)用仍面臨諸多問題:作業(yè)過程存在安全風(fēng)險(xiǎn)、運(yùn)動(dòng)光順與平穩(wěn)協(xié)調(diào)難、作業(yè)順序與布局耦合強(qiáng)、機(jī)器人與人協(xié)作程度低、機(jī)器人作業(yè)自主性較低、機(jī)器人故障智能預(yù)測(cè)難、機(jī)器人維修維護(hù)效率低、品牌多樣、操作差異大。
? 對(duì)此,需要通過突破工業(yè)機(jī)器人設(shè)計(jì)的關(guān)鍵技術(shù),緊密結(jié)合人工智能、數(shù)字孿生技術(shù),來解決工業(yè)機(jī)器人設(shè)計(jì)應(yīng)用全流程的突出難題。要設(shè)計(jì)好、應(yīng)用好機(jī)器人,有三個(gè)方面的需求:一是機(jī)器人應(yīng)用起來需要平穩(wěn)高效,運(yùn)動(dòng)比較穩(wěn)定;二是人機(jī)協(xié)作;三是虛實(shí)結(jié)合。
? 首先,平穩(wěn)高效要求我們?cè)诖_保作業(yè)精度和平穩(wěn)性的同時(shí),實(shí)現(xiàn)機(jī)器人作業(yè)的順序、路徑、軌跡等的自主規(guī)劃,提高作業(yè)效率,這是機(jī)器人設(shè)計(jì)的基本要求。其次,人機(jī)協(xié)同要包括人機(jī)交互、人機(jī)交流、人機(jī)一體,實(shí)現(xiàn)機(jī)器人能夠直接與人并肩工作,消除人機(jī)之間的防護(hù)隔離,實(shí)現(xiàn)人機(jī)交互的擬人化。再次,虛實(shí)融合要求充分利用物理模型、傳感器更新、運(yùn)行歷史數(shù)據(jù),在虛擬空間中完成虛實(shí)映射與反饋控制,提高機(jī)器人的智能化程度。
? 根據(jù)這三個(gè)實(shí)際目標(biāo),需解決如何在保證機(jī)器人作業(yè)精確性與平穩(wěn)性的前提下,提高作業(yè)的效率?如何實(shí)現(xiàn)多機(jī)器人的協(xié)同控制、機(jī)器人與人共融的協(xié)調(diào)作業(yè)?如何提高虛實(shí)映射的仿真可信性并實(shí)現(xiàn)工業(yè)機(jī)器人的以虛控實(shí)?目前,經(jīng)研究已實(shí)現(xiàn)了以下六項(xiàng)關(guān)鍵技術(shù):機(jī)器人本體與控制系統(tǒng)設(shè)計(jì)、工業(yè)機(jī)器人動(dòng)態(tài)平穩(wěn)性設(shè)計(jì)、協(xié)作機(jī)器人的智能交互設(shè)計(jì)、機(jī)器人視覺感知與自主學(xué)習(xí)、機(jī)器人作業(yè)規(guī)劃與布局設(shè)計(jì)、機(jī)器人虛擬示教與數(shù)字孿生。
? ▍?二、機(jī)器人設(shè)計(jì)關(guān)鍵技術(shù)
? 2.1 機(jī)器人本體與控制系統(tǒng)的設(shè)計(jì)
? 通過突破機(jī)器人本體設(shè)計(jì)與開發(fā)的各技術(shù)環(huán)節(jié),構(gòu)建機(jī)器人本體,結(jié)合機(jī)器人運(yùn)動(dòng)控制技術(shù)、機(jī)器人作業(yè)規(guī)劃與示教技術(shù)的研究,開發(fā)工業(yè)機(jī)器人的軟硬件成套系統(tǒng)。在實(shí)現(xiàn)支持多品牌機(jī)器人示教編程的同時(shí),降低整機(jī)的系統(tǒng)成本。其中包括:關(guān)節(jié)減速機(jī)構(gòu)設(shè)計(jì)、內(nèi)部散熱系統(tǒng)設(shè)計(jì)、機(jī)器人本體的可裝配性分析、機(jī)器人本體3D打印制造、機(jī)器人高性能通用控制系統(tǒng)設(shè)計(jì)。 ? (1)關(guān)節(jié)減速機(jī)構(gòu)設(shè)計(jì)
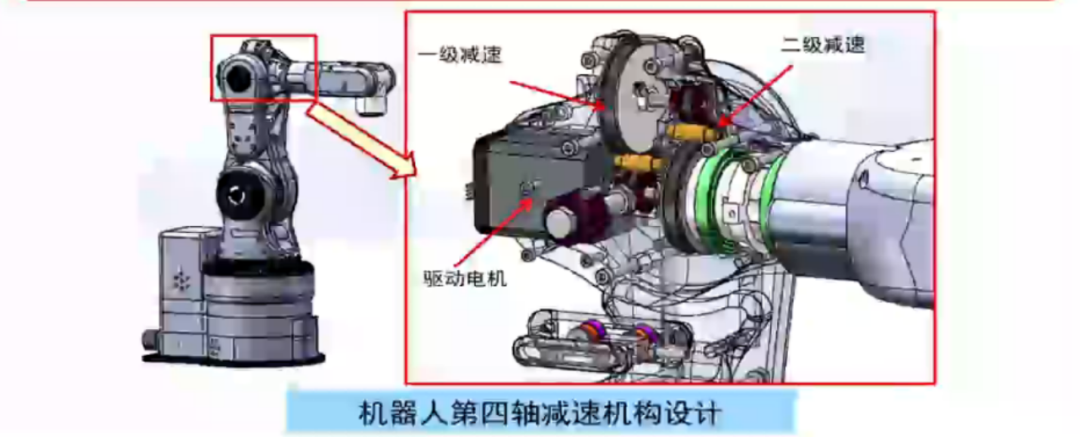
? 圖1所示為機(jī)器人關(guān)節(jié)減速機(jī)構(gòu)設(shè)計(jì),主要是改善機(jī)器人傳動(dòng)鏈長(zhǎng)、傳動(dòng)結(jié)構(gòu)復(fù)雜、傳動(dòng)誤差大的不足,配合高強(qiáng)度內(nèi)置鋼絲同步帶進(jìn)行二級(jí)減速確保傳動(dòng)精度,利用數(shù)控系統(tǒng)對(duì)位置誤差及反向間隙進(jìn)行補(bǔ)償,保證位置重復(fù)精度。
 ? ?
? ?
圖1?機(jī)器人第四軸減速機(jī)構(gòu)設(shè)計(jì)
? (2)內(nèi)部散熱系統(tǒng)設(shè)計(jì)
? 機(jī)器人驅(qū)動(dòng)電機(jī)剎車發(fā)熱嚴(yán)重,同時(shí)安裝空間相對(duì)封閉,長(zhǎng)時(shí)間工作后密閉空間溫度較高。基于計(jì)算流體動(dòng)力學(xué)CFD分析,對(duì)內(nèi)部散熱系統(tǒng)和風(fēng)道進(jìn)行設(shè)計(jì)仿真和優(yōu)化(圖2),實(shí)現(xiàn)空氣的循環(huán)散熱。
?  ? ?
? ?
圖2?內(nèi)部散熱系統(tǒng)設(shè)計(jì)
? (3)機(jī)器人本體的可裝配性分析
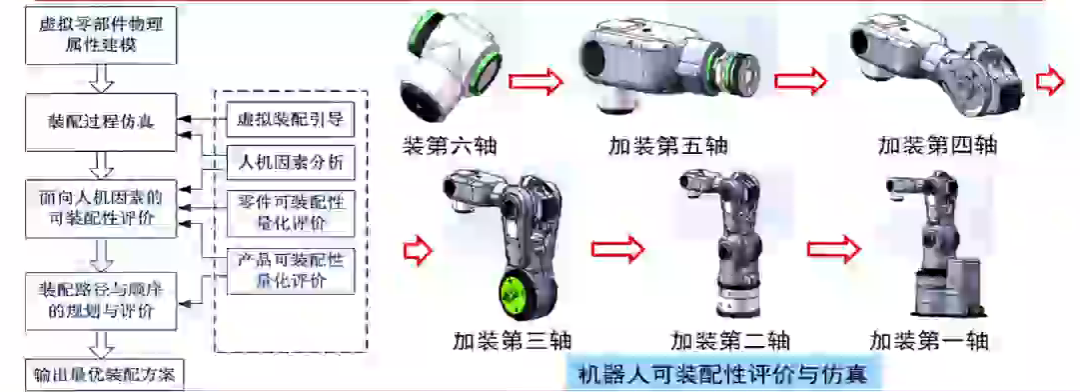
? 通過物理建模分析結(jié)構(gòu)因素對(duì)零件可裝配性的影響,量化裝配過程人機(jī)因素,結(jié)合裝配順序和所有子裝配體的可裝配性,實(shí)現(xiàn)產(chǎn)品級(jí)可裝配性評(píng)價(jià)(圖3)。與傳統(tǒng)的通過專家打分或裝配經(jīng)驗(yàn)進(jìn)行模糊評(píng)判相比,評(píng)價(jià)結(jié)果更加準(zhǔn)確可靠,保證了機(jī)器人的可裝配性。
?  ? ?
? ?
圖3?機(jī)器人本體的可裝配性分析
? (4)機(jī)器人本體3D打印制造
? 為有效提高機(jī)器人3D打印結(jié)構(gòu)件的制造精度以保證裝配質(zhì)量,通過對(duì)試驗(yàn)樣品進(jìn)行3D打印正交試驗(yàn)及回歸分析,提出3D打印工藝參數(shù)的優(yōu)化組合以及尺寸誤差的修正方法,制造出與定位面貼附吻合良好的、具有較高精度的機(jī)器人本體結(jié)構(gòu)件,為提升3D打印型機(jī)器人本體的精確性提供了技術(shù)保障。
? (5)機(jī)器人高性能通用控制系統(tǒng)設(shè)計(jì)
? 機(jī)器人高性能通用控制系統(tǒng),設(shè)計(jì)開發(fā)了HRM-P脈沖型及HRM-E總線型高性能、開放式、平臺(tái)化、網(wǎng)絡(luò)化以及標(biāo)準(zhǔn)化的機(jī)器人運(yùn)動(dòng)控制器及運(yùn)動(dòng)控制軟件,支持無硬件虛擬仿真,包含多類型機(jī)器人運(yùn)動(dòng)學(xué)模型,提供點(diǎn)到點(diǎn)、直線圓弧、混合軌跡規(guī)劃功能。
? 2.2 工業(yè)機(jī)器人的動(dòng)態(tài)平穩(wěn)性設(shè)計(jì)
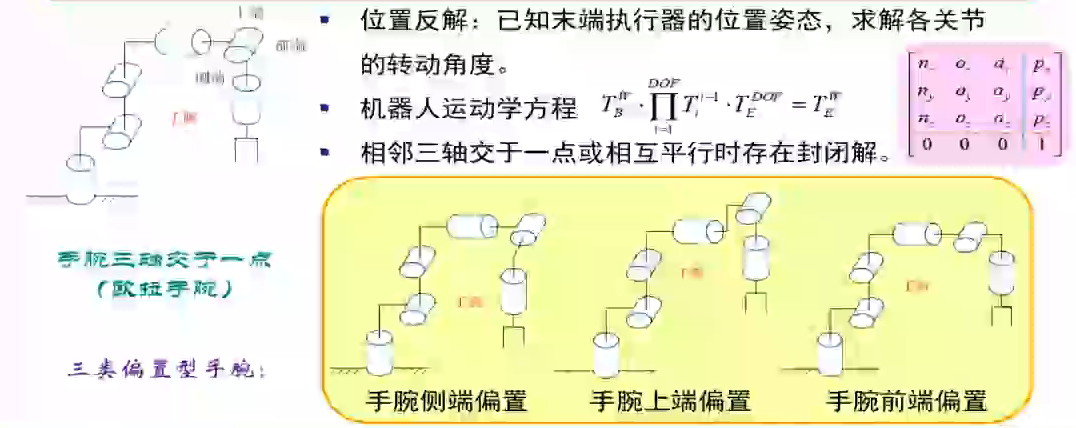
? 針對(duì)動(dòng)態(tài)平穩(wěn)性設(shè)計(jì),筆者提出基于切斷點(diǎn)自由度解耦的機(jī)器人位置反解方法(圖6),通過反解提出去切斷點(diǎn)自由度解耦的位置反求。
?  ? ?
? ?
圖6?基于切斷點(diǎn)自由度解耦的機(jī)器人位置反解方法
? 這方面主要是利用機(jī)器人的幾何結(jié)構(gòu)特征,將機(jī)構(gòu)運(yùn)動(dòng)鏈切斷為兩個(gè)部分,使兩個(gè)子運(yùn)動(dòng)鏈在切斷點(diǎn)處運(yùn)動(dòng)自由度的某個(gè)分量上的耦合度最小,從而能夠?qū)⒏呔S超越方程組轉(zhuǎn)化為僅含1個(gè)未知數(shù)的非線性方程,解決了非傳統(tǒng)的末端三軸不交于一點(diǎn)的6自由度工業(yè)機(jī)器人位置反解問題,為機(jī)器人運(yùn)動(dòng)控制打好基礎(chǔ)。
此外,還提出含間隙運(yùn)動(dòng)副元素分離判斷準(zhǔn)則,過去假想機(jī)器人的關(guān)節(jié)是一個(gè)點(diǎn),實(shí)際上兩個(gè)構(gòu)件形成運(yùn)動(dòng)副中間是有間隙的,充分考慮間隙對(duì)于運(yùn)動(dòng)副、運(yùn)動(dòng)軌跡的影響,實(shí)現(xiàn)判斷正確性的提高,提出含間隙運(yùn)動(dòng)副的優(yōu)化設(shè)計(jì)。
? 2.3 協(xié)作機(jī)器人的智能交互設(shè)計(jì)
? 在協(xié)作工業(yè)機(jī)器人的開發(fā)過程中,需要考慮小型輕量、操作安全、智能交互、開放架構(gòu)等因素。虛擬示教系統(tǒng)的開發(fā),能夠以虛控實(shí)來帶動(dòng)人機(jī)協(xié)同、人機(jī)協(xié)作。在這個(gè)過程當(dāng)中,協(xié)作工業(yè)機(jī)器人的碰撞檢測(cè)也十分重要。當(dāng)判斷出機(jī)器人存在碰撞問題,立即采取相應(yīng)的保護(hù)措施,操控機(jī)器人急停或減速。
? 此外,協(xié)作工業(yè)機(jī)器人運(yùn)動(dòng)算法的提出,實(shí)現(xiàn)協(xié)作機(jī)器人運(yùn)動(dòng)控制算法庫的創(chuàng)建。其中包括機(jī)器人正逆運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)、關(guān)節(jié)空間和笛卡爾空間的直線圓弧軌跡規(guī)劃、帶過渡段的連續(xù)軌跡規(guī)劃、時(shí)間最優(yōu)軌跡規(guī)劃和外部軸算法等。
? 2.4 機(jī)器人視覺感知與自主學(xué)習(xí)
? 通過智能學(xué)習(xí)算法實(shí)現(xiàn)了機(jī)器人的自主操作,獨(dú)立自主完成抓取、裝配、搬運(yùn)等作業(yè)活動(dòng)。
? 基于機(jī)器學(xué)習(xí)的工業(yè)機(jī)器人視覺理解,通過深度學(xué)習(xí)、強(qiáng)化學(xué)習(xí)、遷移學(xué)習(xí)等手段,構(gòu)建工業(yè)機(jī)器人視覺理解數(shù)學(xué)模型,對(duì)視覺感知系統(tǒng)獲取的圖像內(nèi)容進(jìn)行理解,實(shí)現(xiàn)工業(yè)機(jī)器人作業(yè)過程中目標(biāo)提取、類別識(shí)別等任務(wù)。
? 基于視覺反饋的工業(yè)機(jī)器人測(cè)量定位,提出了基于三維結(jié)構(gòu)光的機(jī)械臂抓取位置檢測(cè)方法,采用深度信息替代彩色圖中的藍(lán)色通道,基于卷積神經(jīng)網(wǎng)絡(luò)的柵格化計(jì)算目標(biāo)工件抓取位置,通過多尺度輸出,應(yīng)對(duì)不同尺寸的抓取位置檢測(cè)。
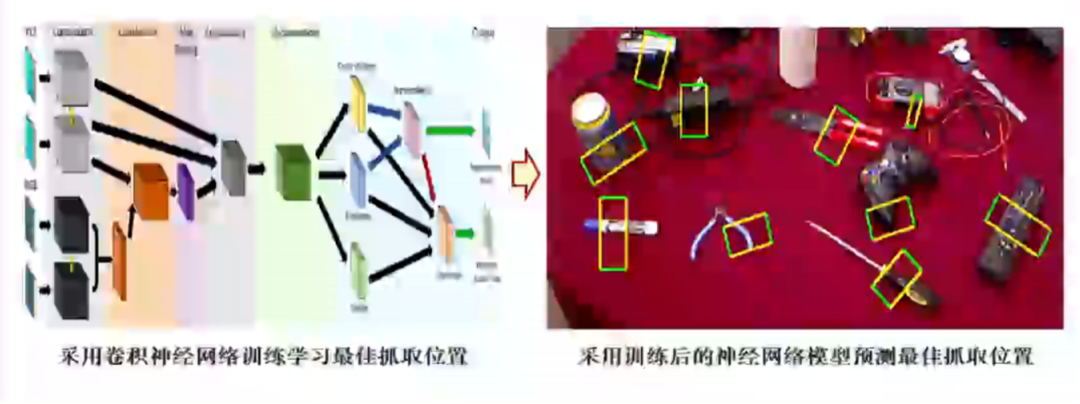
? 基于卷積神經(jīng)網(wǎng)絡(luò)的機(jī)器人最佳抓取位置預(yù)測(cè)(圖9),提出了基于RGBD圖像信息的機(jī)器人抓取位置學(xué)習(xí)預(yù)測(cè)方法,構(gòu)建卷積神經(jīng)網(wǎng)絡(luò)計(jì)算不同抓取窗口的抓取概率,將計(jì)算所得最大概率的窗口選定為物體最佳抓取位置,從而準(zhǔn)確預(yù)測(cè)不同物體的最佳抓取位置。
?  ? ?
? ?
圖9?基于卷積神經(jīng)網(wǎng)絡(luò)的機(jī)器人最佳抓取位置預(yù)測(cè)
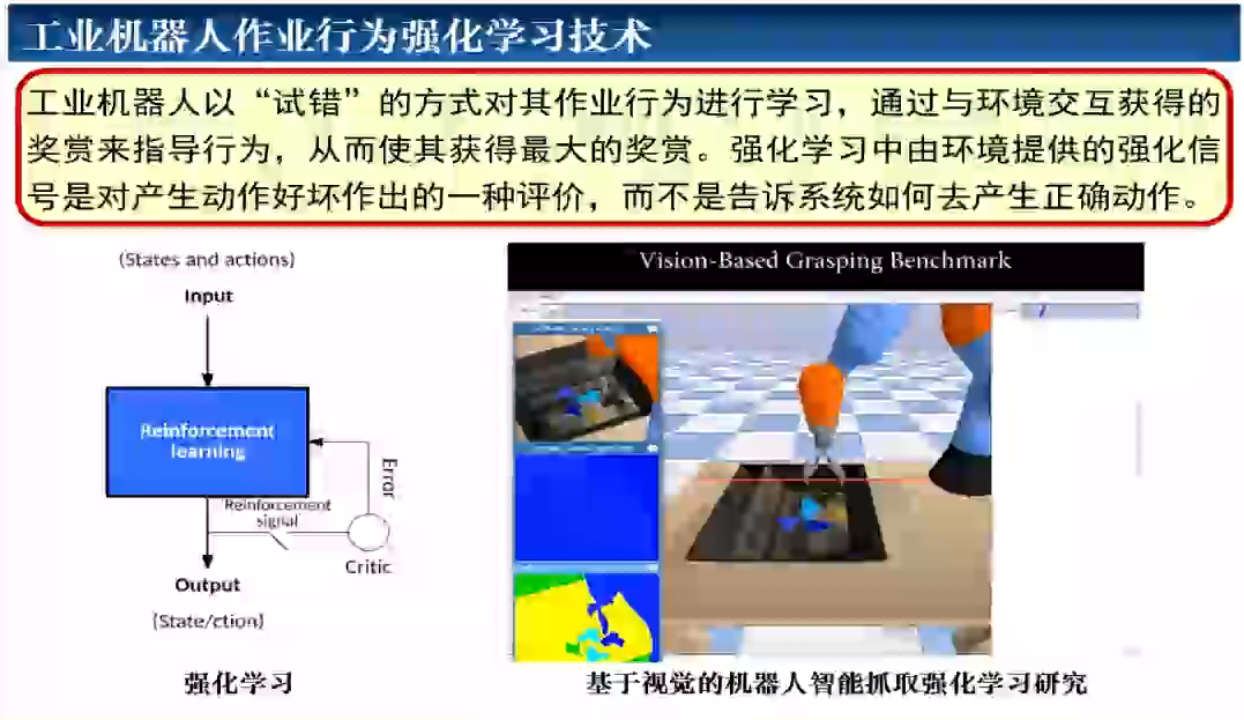
? 圖10所示為工業(yè)機(jī)器人作業(yè)行為強(qiáng)化學(xué)習(xí)技術(shù),工業(yè)機(jī)器人以“試錯(cuò)”的方式對(duì)其作業(yè)行為進(jìn)行學(xué)習(xí),通過與環(huán)境交互獲得的獎(jiǎng)賞來指導(dǎo)行為,從而使其獲得最大的獎(jiǎng)賞。強(qiáng)化學(xué)習(xí)中由環(huán)境提供的強(qiáng)化信號(hào)是對(duì)產(chǎn)生動(dòng)作好壞做出的一種評(píng)價(jià),而不是告訴系統(tǒng)如何去產(chǎn)生正確動(dòng)作。
?  ? ?
? ?
圖10?機(jī)器人作業(yè)行為強(qiáng)化學(xué)習(xí)技術(shù)
? 2.5?機(jī)器人職業(yè)規(guī)劃與布局設(shè)計(jì)
? 優(yōu)化機(jī)器人布局應(yīng)該滿足兩個(gè)條件:不僅能使機(jī)器人末端執(zhí)行器以合理的姿態(tài)到達(dá)指定的空間位置,而且能使機(jī)器人完成任務(wù)的工作周期時(shí)間盡量短。然而,機(jī)器人工作站布局設(shè)計(jì)與作業(yè)規(guī)劃存在一定的復(fù)雜性,通過研究發(fā)現(xiàn),存在多種可行的作業(yè)拓?fù)漤樞颍?dāng)需要完成某項(xiàng)作業(yè)時(shí),能夠有多種方案。例如弧焊作業(yè)時(shí),各條焊縫的焊接順序可以變化(圖11)。
? 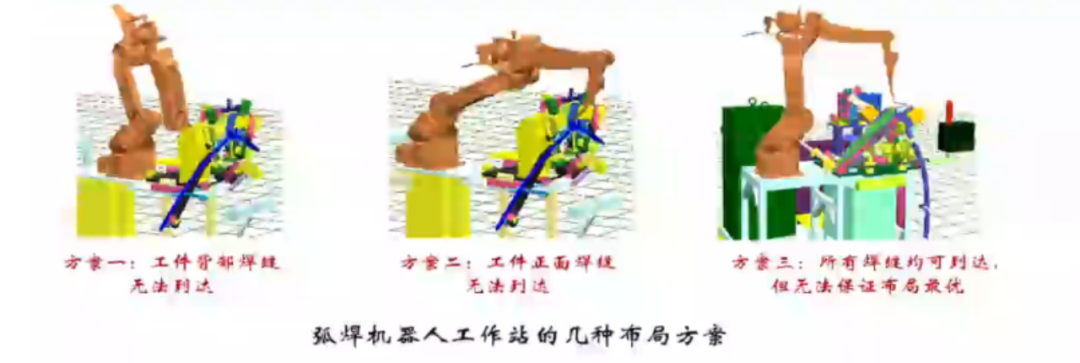
圖11?弧焊機(jī)器人工作站的幾種布局方案
? 其次,機(jī)器人基座位置和作業(yè)拓?fù)漤樞蛳嗷ヱ詈希餐绊憴C(jī)器人工作時(shí)間。針對(duì)這一難點(diǎn),提出基于蟻群算法的作業(yè)順序規(guī)劃與機(jī)器人布局協(xié)同優(yōu)化方法,解決機(jī)器人的作業(yè)規(guī)劃問題。一是提出廣義逆可達(dá)工作空間相容性檢測(cè)方法,快速建立機(jī)器人基座解空間;二、是提出機(jī)器人基座可行解空間離散網(wǎng)絡(luò)的作業(yè)順序蟻群優(yōu)化算法,實(shí)現(xiàn)具有相同最優(yōu)作業(yè)順序的基座解空間劃分;三是采用模式搜索算法,實(shí)現(xiàn)作業(yè)順序確定條件下的機(jī)器人布局設(shè)計(jì)。
? 2.6 工業(yè)機(jī)器人虛擬示教與數(shù)字孿生
? 通過虛實(shí)交互反饋,在同一個(gè)界面下調(diào)用、使用多類型機(jī)器人的示教界面(圖12)。通過集成構(gòu)建ABB、發(fā)那科(FANUC)、安川、庫卡等多個(gè)品牌機(jī)器人的編程器模擬界面,用戶可以通過虛擬編程器的操作,進(jìn)行相應(yīng)虛擬和實(shí)體機(jī)器人的控制及相關(guān)功能操作,實(shí)現(xiàn)工業(yè)機(jī)器人的虛擬示教。
?  ?
?
圖12?多類型機(jī)器人的虛擬示教界面
? 在這個(gè)基礎(chǔ)上,初步實(shí)現(xiàn)工業(yè)機(jī)器人數(shù)字孿生遙操作技術(shù)(圖13),基于主動(dòng)引導(dǎo)的虛擬環(huán)境中接觸力覺連續(xù)生成方法,通過數(shù)字孿生實(shí)現(xiàn)真實(shí)機(jī)器人的力反饋遙操作,使操作人員更真實(shí)地感知遠(yuǎn)程機(jī)器人操作對(duì)象,輔助操作人員更精準(zhǔn)、便捷地完成操作任務(wù)。
? 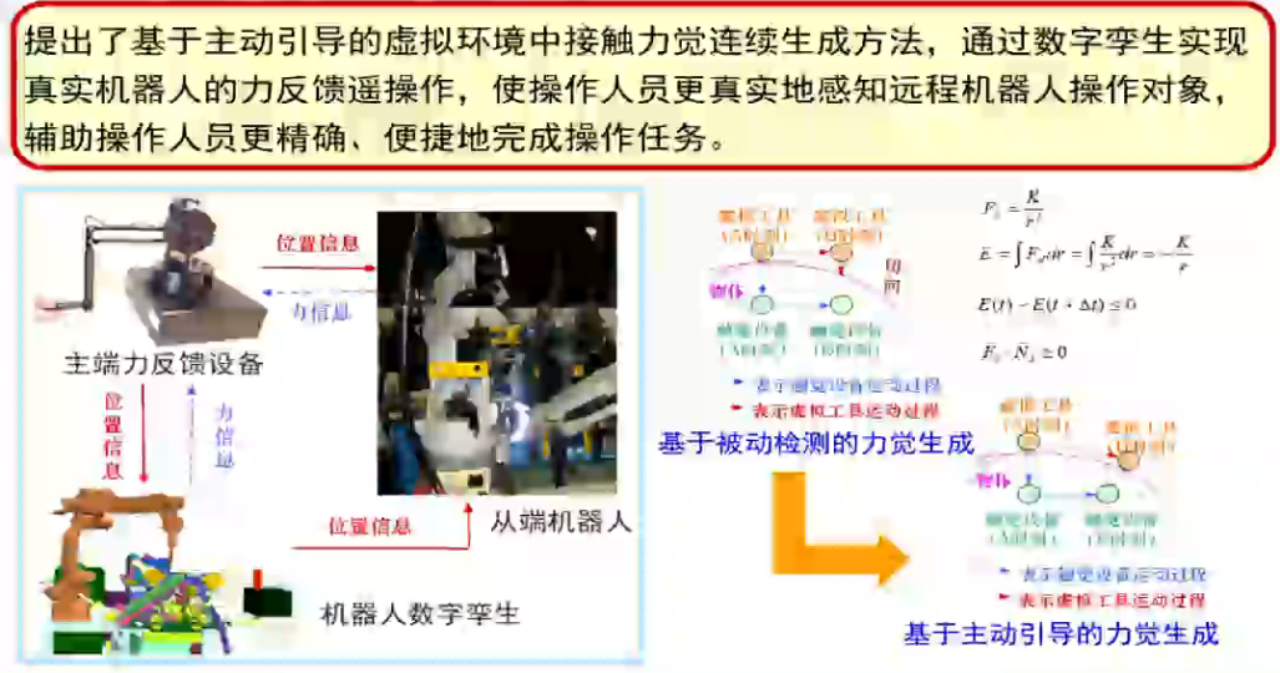 ? 圖13?數(shù)字孿生遙操作技術(shù)
? 圖13?數(shù)字孿生遙操作技術(shù)
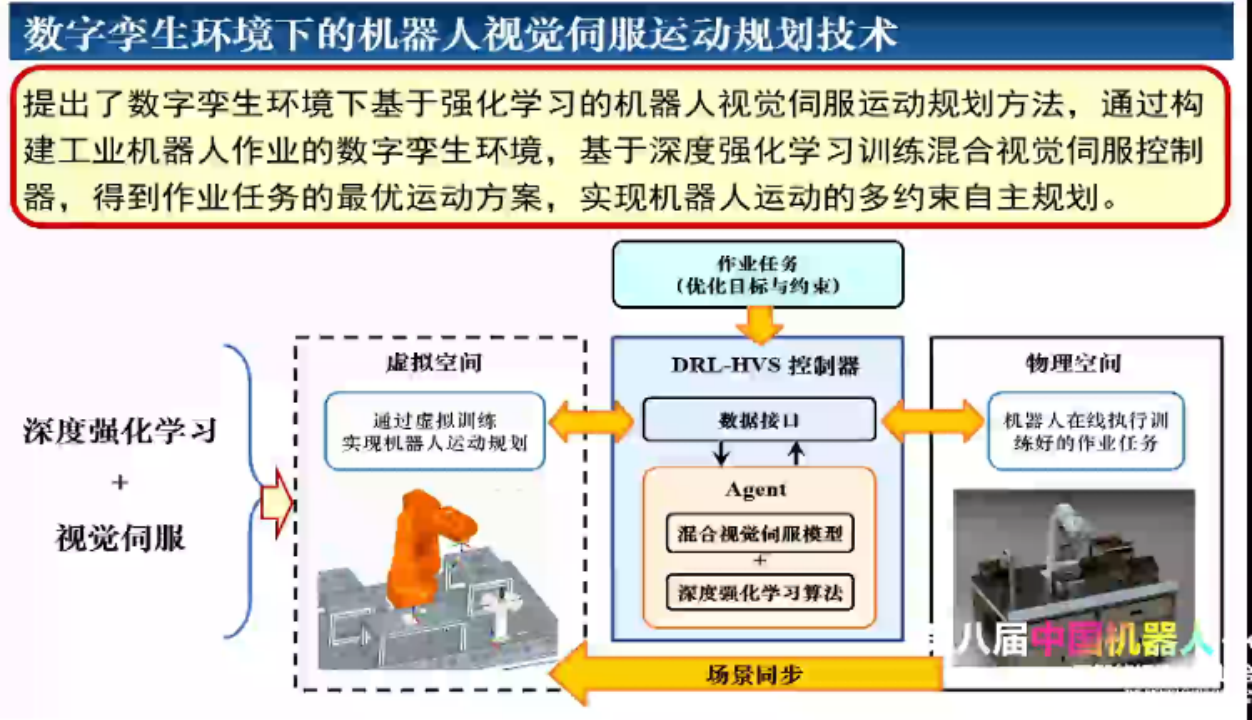
? 數(shù)字孿生環(huán)境下的機(jī)器人視覺伺服運(yùn)動(dòng)規(guī)劃技術(shù)(圖14),通過構(gòu)建工業(yè)機(jī)器人作業(yè)的數(shù)字孿生環(huán)境,基于深度強(qiáng)化學(xué)習(xí)訓(xùn)練混合視覺伺服控制器,得到作業(yè)任務(wù)的最優(yōu)運(yùn)動(dòng)方案,實(shí)現(xiàn)機(jī)器人運(yùn)動(dòng)的多約束自主規(guī)劃。
?  ?
?
圖14?機(jī)器人視覺伺服運(yùn)動(dòng)規(guī)劃技術(shù)
? 基于增強(qiáng)現(xiàn)實(shí)的工業(yè)機(jī)器人維修導(dǎo)航技術(shù),通過增強(qiáng)現(xiàn)實(shí)的數(shù)字孿生可視化虛實(shí)交互技術(shù),實(shí)現(xiàn)工業(yè)機(jī)器人維修維護(hù)操作智能導(dǎo)航,將當(dāng)前維修任務(wù)的工藝文件以虛擬維修指令的形式,引導(dǎo)維修人員進(jìn)行故障處理,有效地提高工業(yè)機(jī)器人的維修維護(hù)效率。
? ▍?三、工業(yè)機(jī)器人應(yīng)用實(shí)例
? 3.1 工業(yè)機(jī)器人本體系統(tǒng)與高性能通用控制系統(tǒng)設(shè)計(jì)研發(fā)
? 浙江大學(xué)等設(shè)計(jì)研發(fā)了具有自主知識(shí)產(chǎn)權(quán)的HRT系列四軸、六軸、七軸工業(yè)機(jī)器人本體系統(tǒng)及高性能通用控制系統(tǒng),覆蓋教育和工業(yè)應(yīng)用領(lǐng)域。其中,筆者團(tuán)隊(duì)自主開發(fā)了一個(gè)機(jī)器人集成工作站,該小型工作站可以在工作站里形成有序的物流,有序的算法的驗(yàn)證。
? 3.2?汽車車門的機(jī)器人焊接線設(shè)計(jì)
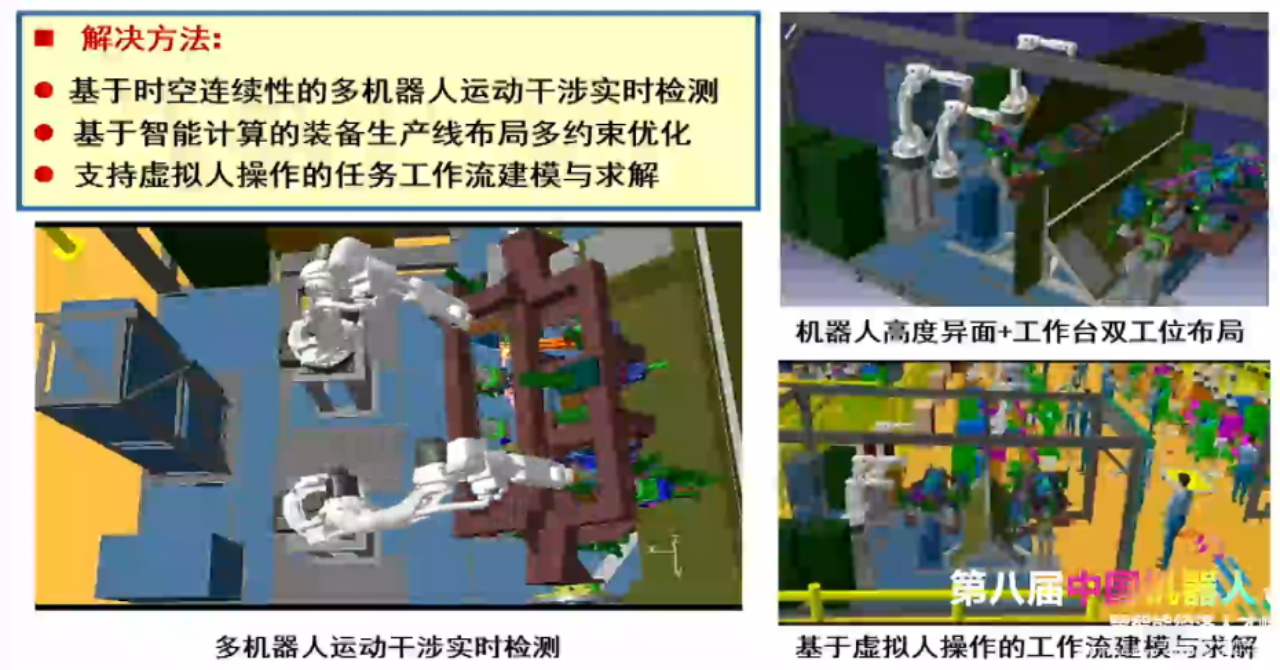
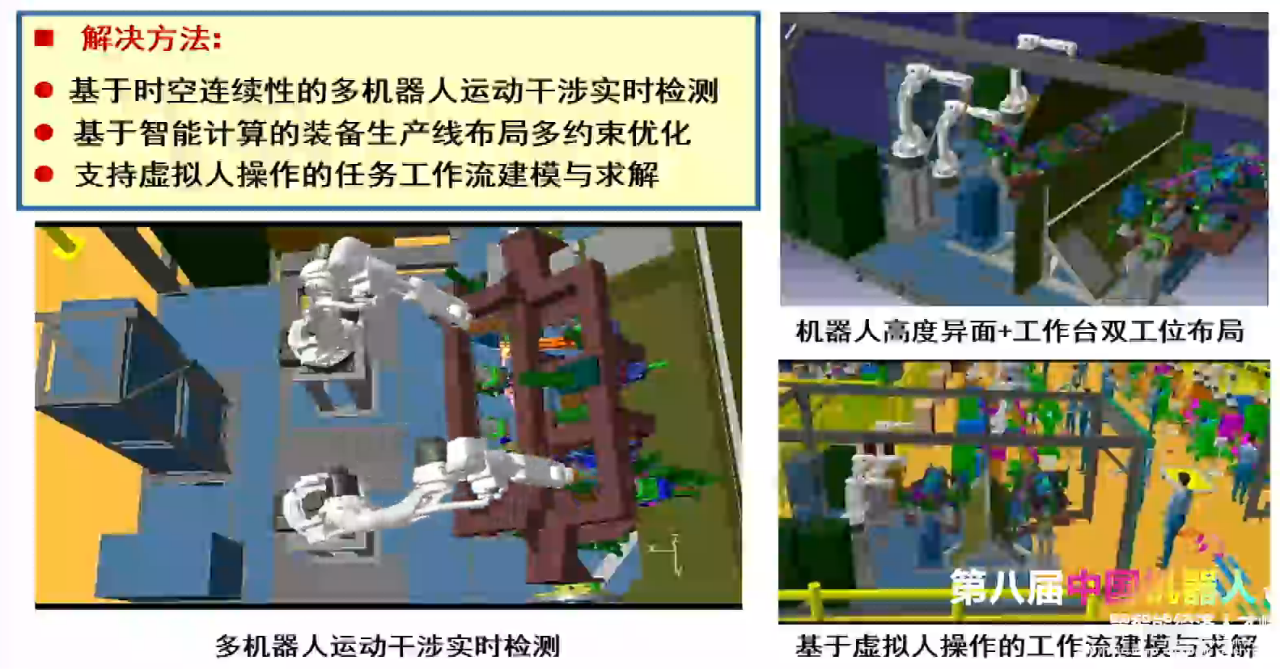
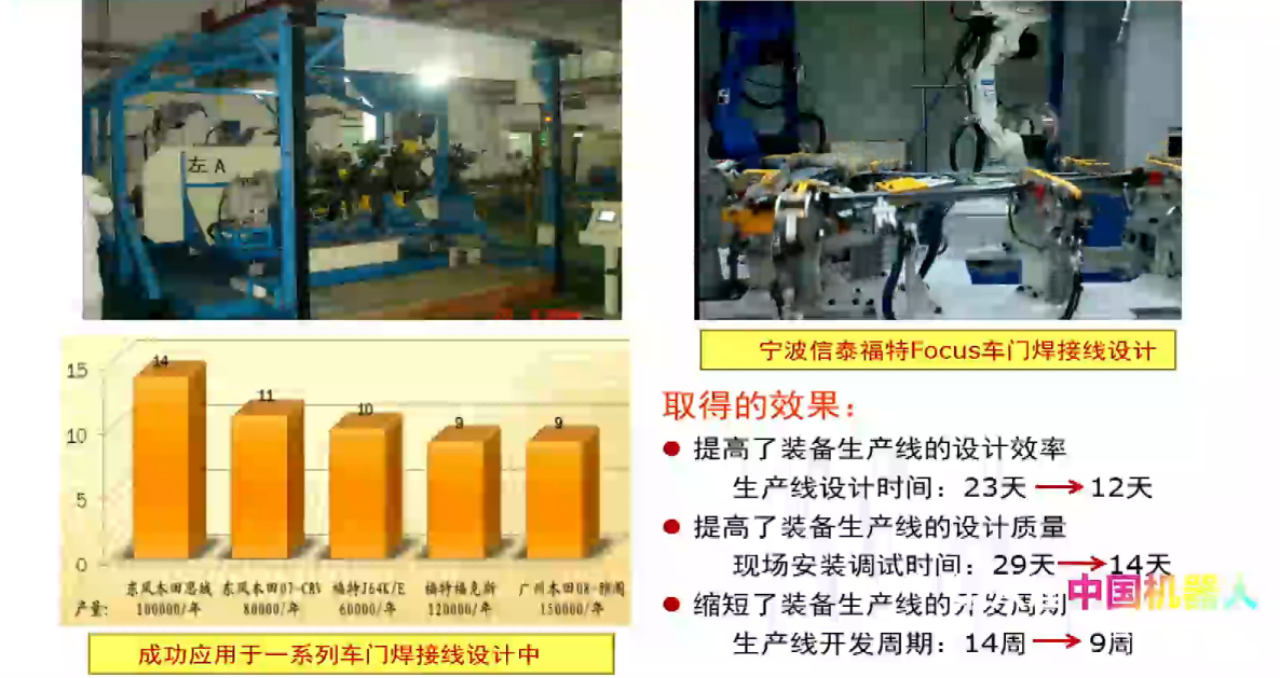
? 采用基于時(shí)空連續(xù)性的多機(jī)器運(yùn)動(dòng)干涉實(shí)時(shí)檢測(cè)(圖17)、基于智能計(jì)算的裝備生產(chǎn)線布局多約束優(yōu)化、基于虛擬人操作的任務(wù)工作流建模與求解(圖18)等方法,解決了焊縫不可達(dá)和焊接干濕的問題,最終提高了裝備生產(chǎn)線的設(shè)計(jì)(圖19)效率、設(shè)計(jì)質(zhì)量,縮短了裝備生產(chǎn)線的開發(fā)周期。
 ?
?
圖17 基于時(shí)空連續(xù)性的多機(jī)器人運(yùn)動(dòng)干涉實(shí)時(shí)檢測(cè)
?  ?
?
圖18?基于虛擬人操作的任務(wù)工作流建模與求解
?  ?
?
圖19?寧波信泰福特Focus車門焊接線設(shè)計(jì)
? 3.3?齒盤堆焊成形生產(chǎn)線設(shè)計(jì)與集成
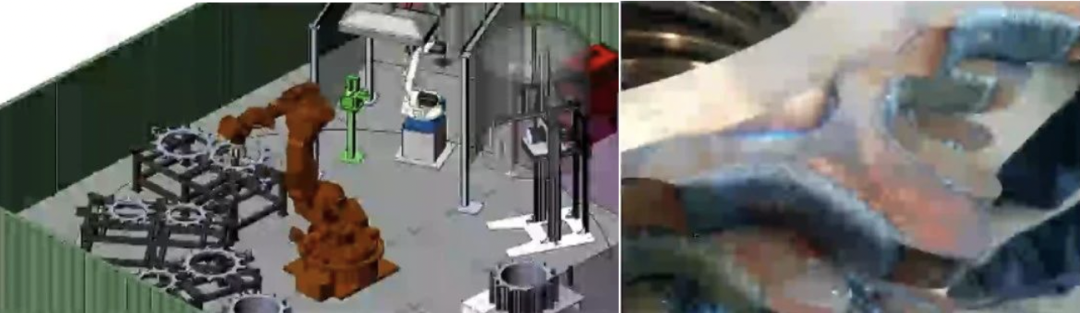
? 車輛齒盤堆焊(圖20)要求在一個(gè)工位上實(shí)現(xiàn)齒盤焊接后直接形成符合設(shè)計(jì)要求的齒面,并集成上下料、焊接、檢測(cè)、碼垛等多項(xiàng)功能。在此過程中,如何確定影響齒盤表面多層堆焊質(zhì)量的主要焊接工藝參數(shù)及其取值方案,如何考慮工裝設(shè)計(jì)與工藝流程設(shè)計(jì)、生產(chǎn)線規(guī)劃的協(xié)同優(yōu)化,如何實(shí)現(xiàn)搬運(yùn)與焊接機(jī)器人的協(xié)同作業(yè),以及與外圍自動(dòng)化輔助設(shè)備的控制集成,成為主要的技術(shù)難點(diǎn)。
 ?
?
圖20?車輛齒盤堆焊
? 3.4?多品牌工業(yè)機(jī)器人虛擬示教編程系統(tǒng)
? 浙江大學(xué)設(shè)計(jì)研發(fā)了面向多品牌工業(yè)機(jī)器人的虛擬示教編程系統(tǒng)(圖21),通過構(gòu)建不同品牌示教器與單一機(jī)器人本體間的映射關(guān)系,實(shí)現(xiàn)多品牌工業(yè)機(jī)器人一體化示教。虛擬示教可以通過人、機(jī)器人在同樣虛擬的界面下進(jìn)行人機(jī)對(duì)話,學(xué)習(xí)到機(jī)器人如何編程。
?  ? ?
? ?
圖21?多品牌虛擬示教器及虛擬示教編程系統(tǒng)
? 除此之外,一系列從正向設(shè)計(jì)到創(chuàng)新設(shè)計(jì)的關(guān)鍵技術(shù)與應(yīng)用:超大型低能耗大型空分裝備設(shè)計(jì)制造技術(shù),高檔數(shù)控機(jī)床數(shù)字化正向設(shè)計(jì)的關(guān)鍵技術(shù),大噸位深拉伸液壓裝備設(shè)計(jì)制造關(guān)鍵技術(shù),一類高端龍門加工中心創(chuàng)新設(shè)計(jì)關(guān)鍵技術(shù),電梯大批量定制設(shè)計(jì)與數(shù)字化智能化技術(shù),數(shù)控機(jī)床遠(yuǎn)程監(jiān)控、診斷與虛擬維修技術(shù),大型艦船分段制造的作業(yè)模擬與優(yōu)化技術(shù),機(jī)器人作業(yè)布局規(guī)劃與智能制造應(yīng)用技術(shù),重大裝備產(chǎn)品性能設(shè)計(jì)、計(jì)算與仿真技術(shù),數(shù)字化裝配關(guān)鍵技術(shù)在航天產(chǎn)品中的應(yīng)用等,幫助一批企業(yè)實(shí)現(xiàn)了數(shù)字化轉(zhuǎn)型。
? 綜上所述,筆者認(rèn)為,工業(yè)機(jī)器人對(duì)于我國智能制造的發(fā)展有著舉足輕重的作用,筆者帶領(lǐng)的團(tuán)隊(duì)在相關(guān)項(xiàng)目研發(fā)上得到黨和國家領(lǐng)導(dǎo)人的高度重視。在從“制造大國”向“制造強(qiáng)國”邁進(jìn)的道路上,需要各方力量協(xié)同合作、久久為功。加快培養(yǎng)人才尤其是具有全球競(jìng)爭(zhēng)力的高層次人才,不斷激發(fā)出其巨大的創(chuàng)新能量,推動(dòng)“中國制造”走向“中國智造”,為全面建設(shè)社會(huì)主義現(xiàn)代化國家、全面推進(jìn)中華民族偉大復(fù)興提供強(qiáng)大支撐、貢獻(xiàn)更大力量。
審核編輯:劉清









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論