 電子發(fā)燒友App
電子發(fā)燒友App


十四五機器人產(chǎn)業(yè)發(fā)展規(guī)劃指出機器人的研發(fā)、制造、應(yīng)用是衡量一個國家科技創(chuàng)新和高端制造業(yè)水平的重要標(biāo)志。當(dāng)前,機器人產(chǎn)業(yè)蓬勃發(fā)展,正極大改變著人類生產(chǎn)和生活方式,為經(jīng)濟社會發(fā)展注入強勁動能。
人形機器人作為機器人產(chǎn)業(yè)中重要的一環(huán),其有著獨特的技術(shù)和功能,廣泛應(yīng)用于教育、科研、服務(wù)、娛樂和工業(yè)等領(lǐng)域,帶來了前所未有的便利和效率。
2023年10月,工信部發(fā)布了《人形機器人創(chuàng)新發(fā)展指導(dǎo)意見》,報告中指出,機器人技術(shù)已有成熟的技術(shù)基礎(chǔ),以大模型等人工智能技術(shù)突破為引領(lǐng),人形機器人技術(shù)加速演進,已成為科技競爭的新高地、未來產(chǎn)業(yè)的新賽道、經(jīng)濟發(fā)展的新引擎,發(fā)展?jié)摿Υ蟆?yīng)用前景廣。
結(jié)合大象機器人的產(chǎn)品布局與發(fā)展路徑,公司正式發(fā)布萬元級售價的水星Mercury人形機器人產(chǎn)品系列。
水星Mercury機器人系列共有三款產(chǎn)品:水星Mercury A1 七軸協(xié)作機械臂和水星Mercury B1半人形雙臂機器人以及 水星Mercury X1通用輪式人形機器人。
三款產(chǎn)品的工業(yè)設(shè)計皆由瑞典團隊精心設(shè)計而成,集成七大機器人核心算法,多種使用與開發(fā)方式,旨在滿足教育、科研、服務(wù)、娛樂和VR遙控操作等五大應(yīng)用場景的需求。
01
水星機器人產(chǎn)品家族
1
水星Mercury A1 - 7軸協(xié)作機器人
水星Mercury A1是一款輕量級7自由度協(xié)作機器人,由7顆大象機器人自研諧波模組驅(qū)動;全新的七軸工業(yè)設(shè)計由瑞典團隊精心操刀,整機使用超輕量碳纖維外殼,減重的同時大幅提高整機強度和剛性。
水星 Mercury A1采用單主控,雙副控控制方式。主控采用Cortext A72 - 1.5GHz、搭載2.0英寸IPS-LCD電容觸摸屏,配合大象機器人自主開發(fā)的機器人便捷開發(fā)操作系統(tǒng)myPanel OS,可實現(xiàn)無需編程的快速部署應(yīng)用。
2
水星Mercury B1 - 雙7軸半人形機器人
水星Mercury B1雙臂半人形機器人共擁有17個自由度,搭載兩臺A1七軸機械臂,具備單臂獨立操作和雙臂協(xié)同操作的能力;頭部搭載一塊9英寸高清液晶顯示觸摸屏,支持多點操控及用戶定制化表情顯示;搭配NVIDIA Xavier主控芯片和四個獨立副控進行控制。配合一體式3D攝像頭,可以完成2D/3D機器視覺引導(dǎo)、抓取以及VR實現(xiàn)遙操作。
作為ChatGPT forRobotics最早適配的機器人品牌,Mercury B1內(nèi)置了高清晰度麥克風(fēng)陣列,支持實時語音采集,將帶來AI語音智能識別交互的全新體驗。
3
水星Mercury X1 - 輪式全人形機器人
水星Mercury X1輪式人形機器人共擁有19自由度,由水星Mercury B1和高性能移動底座組合而成。整機配備英偉達Jetson Xavier 和Jetson Nano雙主控,上半身獨立四個副控,下半身獨立一個副控進行搭配控制。 移動底座配備高性能激光雷達,超聲波傳感器和2D視覺等豐富感知;采用直驅(qū)電機驅(qū)動,最大運行速度達1.2m/s;最大爬坡高度2CM;最大爬坡角度15度。整機最大續(xù)航高達8小時,滿足個人及商業(yè)應(yīng)用的需求。
02
力源系列諧波模組,大扭矩輕自重,全新自研模組輸出澎湃動力
水星機器人全系產(chǎn)品搭載大象機器人全新自研力源系列諧波模組。全新模塊化設(shè)計模組標(biāo)配電磁制動剎車,中空走線。具有高精度、高慣量、低自重等特點。
最大輸出扭矩可達80Nm,最高可選配多圈12位編碼器,重復(fù)定位精度高達0.6弧分。配合機械臂整機外殼采用的鋁合金與碳纖維材質(zhì),進一步降低整機自重,優(yōu)化動力表現(xiàn)。
03
強大算力加持,賦能具身智能新疆界
水星Mercury人形機器人B1,X1采用了全新英偉達Jetson Xavier邊緣計算核心作為主控模組。高達21TOPS 的 AI 性能使這些模組為處理視覺測距、傳感器融合、定位和地圖構(gòu)建、障礙物檢測和路徑規(guī)劃算法提供了強大的算力保障,為具身智能領(lǐng)域開發(fā)和應(yīng)用創(chuàng)造無限可能。
尤其在克服VR遙操作技術(shù)難題的過程中,確保獲取低延遲的視頻流是關(guān)鍵挑戰(zhàn)之一。大象機器人采用了創(chuàng)新性的解決方案,即通過利用NVIDIA Xavier平臺提供的Accelerated GStreamer插件,成功實現(xiàn)了GPU加速的視頻編解碼,在保障實時性的同時,最大程度地優(yōu)化帶寬利用率,為VR遙操作提供硬件加速。
04
七大集成算法,打造機器智能

水星Mercury機器人系列產(chǎn)品首次集成了七大智能算法,整體提升機械臂運動學(xué)和動力學(xué)表現(xiàn),抑制震動,雙臂流暢協(xié)同,與視覺、激光和語音傳感器深度融合在人工智能的加持下全方位打造立體的機器智能。
1
水星七軸機械臂控制
具備的運動學(xué)算法可實現(xiàn)直線、圓弧、樣條等相應(yīng)軌跡。七軸機械臂又被稱為冗余機械臂,其擁有形同人手的冗余結(jié)構(gòu),可維持末端位姿不變,僅修改冗余臂角即可實現(xiàn)零空間運動。冗余臂角的存在,令機器人無需做大幅度姿態(tài)旋轉(zhuǎn)即可移動到相鄰的連續(xù)位置,在小范圍的旋轉(zhuǎn)運動上具備得天獨厚的優(yōu)勢。水星機器人系列還具備拖動示教、機械臂軟浮動、碰撞檢測、速度融合等已在大象機器人其他產(chǎn)品線上實現(xiàn)的功能。
2
雙臂協(xié)同
從人類具備雙手協(xié)同工作中獲得設(shè)計靈感,myBlockly集成雙臂同步協(xié)同算法,實現(xiàn)雙臂協(xié)同工作,使機器人在復(fù)雜和精密的任務(wù)中表現(xiàn)得更加靈活和高效。同時具備雙臂自干涉檢測、同步、配合等常規(guī)算法。
3
SLAM激光導(dǎo)航
采用先進的RTABMAP 3D與2D配合的SLAM導(dǎo)航技術(shù)。通過激光雷達感知平面環(huán)境,使用3D攝像頭實時構(gòu)建地圖并同時定位,水星Mercury實現(xiàn)了智能導(dǎo)航、避障,具有高效而精準(zhǔn)的移動能力。
4
單目視覺
借助先進的視覺算法和基于OpenCV的技術(shù),水星機械臂實現(xiàn)了多項智能識別功能。顏色、形狀、Aruco標(biāo)記、特征點以及YOLO目標(biāo)檢測等多重識別方式,使機械臂能夠快速、精準(zhǔn)地應(yīng)對各類任務(wù)。
無論是色彩辨識、形狀定位,還是迅速捕捉特定標(biāo)記物,水星Mercury機械臂都展現(xiàn)出卓越的靈活性和高效性。在復(fù)雜多變的工作環(huán)境中,它能夠以智能的方式完成任務(wù),是工作場景中的得力助手。
5
雙目視覺
水星Mercury機器人引入了先進的室內(nèi)3D視覺重建技術(shù),能夠通過激光雷達和攝像頭,精準(zhǔn)捕捉室內(nèi)環(huán)境。借助特征提取和深度估計,實時生成精確的三維地圖,為智能導(dǎo)航和環(huán)境理解提供強大支持。
6
myBlockly結(jié)合了語音識別和GPT模型,可以將用戶的語音指令轉(zhuǎn)化為Blockly代碼。用戶只需通過簡單的口頭指令,即可生成復(fù)雜的Blockly代碼,無需手動輸入,大大提高了編程的效率。
7
ChatGPT融合
myBlockly集成了ChatGPT,通過自然語言與ChatGPT交互實現(xiàn)AI編程。用戶無需了解編程語言,只需描述程序的功能,即可實現(xiàn)一鍵生成Blockly積木塊,輕松構(gòu)建復(fù)雜程序。
05
三大集成軟件操作方式,全新自研操作軟件!重新定義人機交互
1
Unleash the power of Mercury effortlessly
水星MercuryA1機械臂內(nèi)置的“myPanel”搭配兩英寸觸摸屏,可實現(xiàn)機械臂的快速示教編程,無需任何額外硬件設(shè)備即可調(diào)試部署。
2
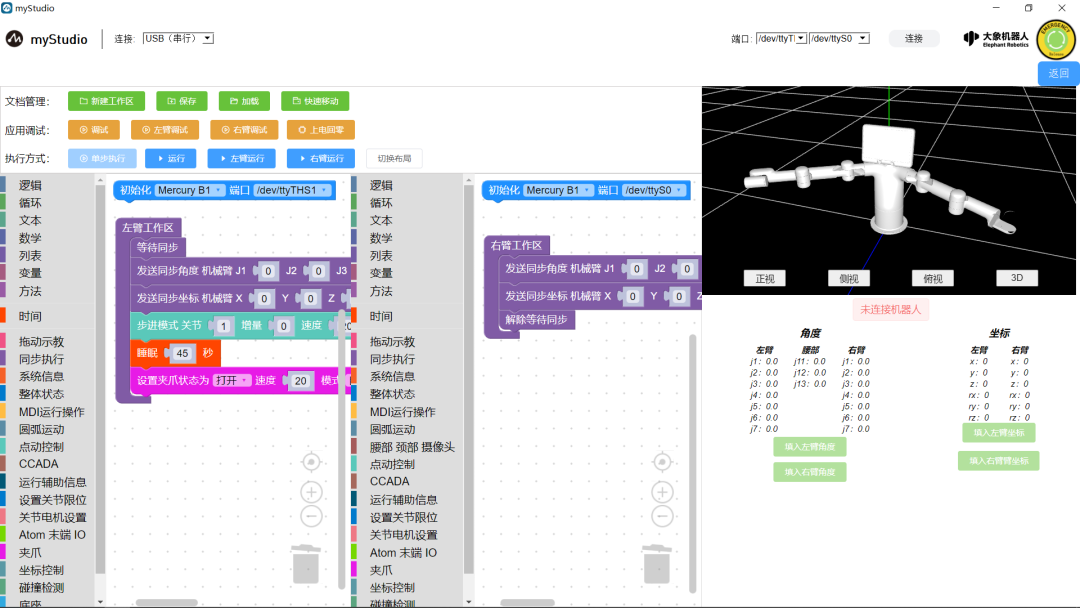
myBlockly(圖形式編程開發(fā)軟件)
全新myBlockly引入了創(chuàng)新的雙編輯欄功能,為用戶提供更加便捷和高效的編程體驗。同時,myBlockly還接入了底座SLAM控制模組api,使得人形機器人的整機編程和控制無縫結(jié)合,進一步擴展了水星Mercury機器人的應(yīng)用領(lǐng)域。 通過預(yù)設(shè)的快捷指令,用戶可以快速編寫左右雙臂的控制程序,實現(xiàn)雙臂的高效協(xié)同工作,從而達到“1+1》2”的效果。
3
VR實時操控
同時配合最新meta Quest3開發(fā)的水星VR遙控操作(MVRM),可實現(xiàn)低時延的VR實時控制,為特殊危險場合提供全新的機器人解決方案。 水星Mercury機器人可實現(xiàn)16自由度的VR操作,支持有線和無線連接,可組合適配2D/3D相機和各式夾爪、吸泵和靈巧手。
得益于NVIDIA Jetson Xavier平臺所提供的Accelerated GStreamer插件,MVRM操作延遲小于300MS;操作精度達到±1MM,目前已經(jīng)率先適配meta Quest3系列。
06
多元軟件生態(tài),支持主流仿真平臺
水星Mercury機器人系列堅持大象軟件開源傳統(tǒng),支持豐富的軟件生態(tài)和主流編程語言。
同時支持包括ROS2, Moveit, Gazebo,Mujoco和Issacsim等主流仿真軟件,便于用戶使用機器人在仿真系統(tǒng)里模擬機器運動,提高了智能自主學(xué)習(xí)和快速迭代的能力。
07
支持二次開發(fā)
1
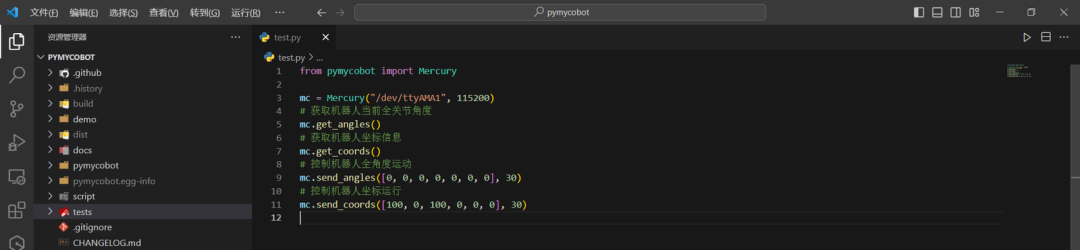
Python API - pymyCobot
pymyCobot是一個通用的 Python 控制庫,旨在支持大象機器人旗下多款機器人,提供了一個簡單而靈活的接口,方便開發(fā)者對機器人進行控制。
2
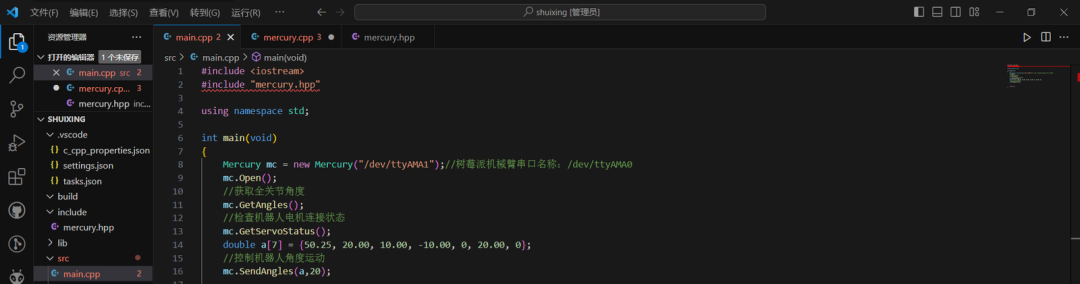
C++ API - Mercury
MercuryAPI是一款專為水星Mercury機器人設(shè)計的C++控制接口。簡潔易用,提供對機器人關(guān)節(jié)、姿態(tài)和執(zhí)行器的靈活控制,助力開發(fā)者快速實現(xiàn)各類機器人應(yīng)用。
08
五大應(yīng)用場景
1
教育場景
機器人教育教學(xué)套裝,水星Mercury A1協(xié)作機械臂可搭配2D或3D視覺模組,可以實現(xiàn)圖像識別、模型訓(xùn)練、機器人控制、運動規(guī)劃、機器人空間標(biāo)定、視覺與機器人手眼標(biāo)定等多個學(xué)科不同領(lǐng)域的知識學(xué)習(xí)。水星Mercury B1機器人可搭配圖漾3D工業(yè)攝像頭進行工業(yè)零件無序抓取。
2
科研場景
一站式科研具身智能人形機器人 ——水星Mercury B1。得益于自研控制算法與自研模組的應(yīng)用,B1 可用于雙臂協(xié)同控制、雙臂運動規(guī)劃、視覺感知加機器人應(yīng)用等多個方向研究與應(yīng)用,是人形機器人應(yīng)用研究的首選機型。
3D SLAM 自動導(dǎo)航場景:輪式全人形機器人——水星 Mercury X1。采用3D攝像頭搭配360全向雷達,搭配英偉達核心主控,實現(xiàn)3D場景掃描建圖,支持ROS 環(huán)境擴展開發(fā),支持加載和保存環(huán)境地圖,讓機器人融入實際環(huán)境,進行機器人移動、自動導(dǎo)航、3D建圖等多種應(yīng)用。
3
服務(wù)場景
水星Mercury系列的強悍性能及內(nèi)在表現(xiàn),搭配優(yōu)雅的外觀設(shè)計,使得水星Mercury機器人不僅可以用于教育、科研場景,也可以用于商業(yè)服務(wù)場景,通過不同的末端配件,搭配各種日常家具家電,機器人可以服務(wù)于實際的公司展示、商業(yè)展會、行業(yè)交流等應(yīng)用環(huán)境,展現(xiàn)機器人服務(wù)員的炫酷應(yīng)用。
4
娛樂場景
搭配自定義的末端執(zhí)行器,進行模擬人類的動作開發(fā),水星Mercury機器人可以實現(xiàn)類人動作應(yīng)用,進行個人應(yīng)用的創(chuàng)意開發(fā)。
5
VR遙操作場景
搭配VR設(shè)備,實現(xiàn)遠程操控的機器人應(yīng)用。
讓機器人控制可以不受時空限制,可以廣泛用于客戶不同場景的遠程落地解決方案。提供雙端軟件覆蓋,支持VR設(shè)備端、機器人端UI界面控制,快速搭建機器人遠程控制場景,讓人形機器人更加實用。
09
豐富周邊生態(tài)
水星Mercury機器人系列提供完整的輔助硬件,包括各式夾爪、吸泵,并且可以同時搭配2D和3D視覺組合使用,真正實現(xiàn)機器人“手眼合一”。
提供3大類10余種配件,跟隨產(chǎn)品同步上市。滿足你的個性化場景開發(fā)需求,擺脫常規(guī)機器人配件選型的應(yīng)用難題。
1
電動夾爪
自適應(yīng)夾爪:最大夾取寬度120mm,最大負載1KG,具備力控抓取,自動適應(yīng)物體寬度,適合多種尺寸的規(guī)則未知物體。
張角式夾爪:最大夾取角度90度,最大負載1KG,具備力控抓取,支持自動適應(yīng)寬度,配合柔性指尖適合形狀不規(guī)則的物體。
平行夾爪:最大夾取寬度50mm、最大負載1KG,具備力控抓取,可控閉合寬度,適合形狀規(guī)則的精確物體。
2
吸盤吸泵
一體式吸盤吸泵:最大負載1KG,一體式安裝應(yīng)用,無需復(fù)吸泵雜線纜連接,支持IO控制。
模塊化吸盤吸泵:多吸頭距離可調(diào),適合平整物體,最大負載1KG,支持IO控制。
3
攝像頭模組
2D攝像頭模組:RGB彩色2M 像素USB攝像頭,可直接接入機械臂末端USB口。
3D攝像頭模組:RealSense 3D 攝像頭,支持采集深度信息。
審核編輯:黃飛







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論