本帖最后由 傲然one 于 2019-5-10 14:24 編輯
圖中R4和C4起到什么作用?
2019-05-08 20:27:36
幅度明顯,比原來的更加耐聽了。如果說原來的C4是奔馳的話,那么摩機后的C4就是勞斯萊斯了。我打這個比喻意思是說在音質(zhì)上的比喻,摩機后的C4在聽感上比原來的C4更舒服!目前也就得出這些結(jié)論,哇哈哈!zt威武
2018-10-29 09:17:44
C語言注釋刪除小工具是什么?C語言注釋刪除小工具共有幾個狀態(tài)?
2021-10-18 06:06:09
普通交流馬達(dá),屬于伺服系統(tǒng)的一部分,主要應(yīng)用于高精度的定位系統(tǒng)。型號舉例:KUKA庫卡 00-103-117 Lenze伺服驅(qū)動器 (EVS9326-KHV531)KUKA庫卡 00-103-118
2020-09-08 16:30:28
KUKA庫卡C4機器人驅(qū)動器故障報警維修庫卡機器人維修內(nèi)容包括庫卡機器人示教器維修,KUKA伺服驅(qū)動模塊維修,庫卡機器人伺服電機維修,KUKA機械手PC工業(yè)電腦維修,庫卡機器人電路板維修,庫卡機
2021-09-17 07:09:52
開機后沒有選擇工具。 解決方案:配置→當(dāng)前工具/基坐標(biāo)→工具號→1 2 專家登陸 一般情況,開機后我們要編輯程序時,首先我們要登陸專家級別,有助于我們操作。 解救方案:配置→用戶組→專家→登陸→密碼KUKA→登陸
2019-07-15 07:48:36
這個是KUKA重型機器人處理和測量混凝土軌枕的視頻。處理得相當(dāng)精細(xì)。真心值得愛好機器者和愛國者研究研究。
2015-02-03 15:18:31
什么是獨立看門狗?什么是窗口看門狗?系統(tǒng)時基定時器(滴答定時器)有什么用?它具有哪些特性?為什么是給操作系統(tǒng)準(zhǔn)備的呢?
2021-07-23 08:43:42
Designer17軟件)中用同樣的方法打開“Customizing PCB Editor”對話框,在工具菜單欄中找到“柵格管理器”這一欄,點擊編輯。(4)彈出“Edit Command”對話框,這時候用戶
2019-07-10 06:25:27
知道。注意.CDF文件是Ishell系統(tǒng)的核心所在,不同的CDF文件可使本IDE適用于不同的編譯、連接系統(tǒng),即本IDE并不僅適于C51。下面談一談Automake工具:  
2008-10-06 18:26:39
,輸入如上內(nèi)容或直接用目錄下源文件。(2) file_save或工具欄將文件存盤。(3) project_new project創(chuàng)建一個project名為hello,并在其中加入hello.c。這時該
2008-10-06 18:30:02
MATLAB建立和控制圖形窗口和坐標(biāo)系命令建立和控制圖形窗口 Figure 建立圖形 Gcf 獲取當(dāng)前圖形的句柄 Clf 清除當(dāng)前圖形 Close 關(guān)閉圖形 建立和控制坐標(biāo)
2009-09-22 16:00:57
的顯示和移動ShowWindow函數(shù)允許設(shè)備窗口屬性為可視或者隱藏。該屬性也可以在窗口創(chuàng)建的過程中由CreateWindowEx實現(xiàn)。窗口的移動包括窗口位置或者大小的變化。當(dāng)窗口位置改變時,系統(tǒng)發(fā)送
2011-06-01 09:40:00
TM4C TI PinMux工具使用教程記得以前TI的TM4C12x是有PinMux這個工具的電腦版的,可以自由的安裝和使用,不過現(xiàn)在電腦版被放棄了,主打的是網(wǎng)絡(luò)版。地址如下所示:https
2018-08-14 06:40:19
μC/OS-III中斷管理和時間管理
2021-01-11 06:35:06
μC/OS-II內(nèi)核的任務(wù)調(diào)度及內(nèi)存管理嵌入式系統(tǒng)的應(yīng)用軟件介紹
2021-04-28 06:19:06
轉(zhuǎn)最新版本教程 為了幫助大家更好的理解窗口管理器的回調(diào)和消息機制,官方也提供了好幾個這方面的例子,本章節(jié)我們將官方這幾個例子也跟大家進(jìn)行簡單講解,進(jìn)一步幫助大家更好的學(xué)習(xí)窗口管理器。38.1 初學(xué)者
2017-02-19 12:10:41
(原點)為(0,0)。Z位置, 底部/頂部 盡管窗口顯示在以X和Y表示的二維屏幕上,但是WM也管理所謂的Z位置或深度坐標(biāo)-- 虛擬的第三維上的位置,該坐標(biāo)確定從背景到前景的位置。各窗口因此可在
2015-04-20 15:23:12
基于C#圖書館管理系統(tǒng)的實現(xiàn)與設(shè)計.doc
2017-07-12 21:41:26
學(xué)生管理系統(tǒng)_C#畢業(yè)設(shè)計.doc
2017-07-12 21:42:35
,參見5.jpg,在Hyper Terminal程序窗口輸入:[root@ok3568:/] # fltest_obexctl.sh [obex]# connect C4:FE:5B:17:C7:78
2022-06-26 18:19:56
本資料是linux操作系統(tǒng)下c語言編程入門教材。目 錄第一章 基礎(chǔ)知識 ……………………………………………………………………………4第二章 進(jìn)程介紹
2012-07-26 22:34:43
什么是C4ISR系統(tǒng)?
2021-06-10 10:43:14
之前簡單介紹了一下Snapdragon Profiler工具,現(xiàn)在我們實際用它來分析一下Dragonboard410c。啟動和配置1、我的系統(tǒng)是ubuntu16.04,直接在Terminal進(jìn)入
2018-09-25 16:14:43
公交車作為目前國內(nèi)客運量最大的公共交通工具,它的管理及服務(wù)上一直存在一些漏洞.鑒于此.一種基于RFID技術(shù)的公交信息管理系統(tǒng)設(shè)計方法被提出。該系統(tǒng)采用TI公司射頻收發(fā)器芯片RI-R6C=001A,并
2019-10-15 07:52:36
基于C#的圖書館管理系統(tǒng)設(shè)計(項目).doc
2018-06-19 21:17:36
基于C#編寫圖書管理系統(tǒng)設(shè)計(代碼).doc
2018-06-17 16:39:51
面臨越來越大的壓力。如何設(shè)計出性能穩(wěn)定、功耗低的電源管理系統(tǒng)已經(jīng)成為嵌入式手持終端設(shè)備開發(fā)的難點之一。本文重點介紹基于微處理器S3C2440A的手持終端電源管理系統(tǒng)。
2019-07-24 06:22:14
本帖最后由 一只耳朵怪 于 2018-5-28 10:31 編輯
跪求下各位大神,此電路如何工作的?C4端電壓多少?三極管如何工作的?
2018-05-27 23:25:43
。 4、3D制圖軟件中定制停靠窗口在浩辰3D制圖軟件定制界面中布局選項窗口就可以調(diào)整命令的停靠樣式、位置等。 以上就是小編給大家介紹的浩辰3D制圖軟件中管理停靠窗口的相關(guān)操作技巧,相信各位小伙伴
2021-04-27 16:38:22
嗨,我在我的windows10系統(tǒng)上安裝了Vivado17.3。當(dāng)我嘗試創(chuàng)建項目時,將打開“硬件管理器”窗口而不是“項目管理器”。相同的安裝文件在windows7中工作正常。如何在windows10
2018-12-29 13:54:08
。Keil4軟件介紹2009年2月發(fā)布Keil uVision4,Keil uVision4引入靈活的窗口管理系統(tǒng),使開發(fā)人員能夠使用多臺監(jiān)視器,并提供了視覺上的表面對窗口位置的完全控制的任何地方
2022-01-24 06:36:27
本文以DSP和CPLD為主體,構(gòu)建電池管理系統(tǒng)的硬件平臺,并在DSP內(nèi)部嵌入μC/OS-II實時操作系統(tǒng),可大大提高系統(tǒng)的穩(wěn)定性和實時響應(yīng)能力,增強系統(tǒng)的可擴展性和可移植性。
2021-05-13 07:00:27
設(shè)置C32。但是,當(dāng)我切換回我自己的項目時,我發(fā)現(xiàn)我只能在項目屬性窗口中選擇XC32編譯器工具鏈。 以上來自于百度翻譯 以下為原文 I have been using the XC32
2019-07-01 12:16:53
本文針對傳統(tǒng)實時操作系統(tǒng)內(nèi)核占用系統(tǒng)資源、影響系統(tǒng)實時性的問題,提出了用單獨的硬件電路實現(xiàn)實時操作系統(tǒng)中的系統(tǒng)調(diào)用和任務(wù)調(diào)度器的方案。重點給出了采用FPGA實現(xiàn)μC/OS-Ⅱ任務(wù)管理模塊的過程。仿真結(jié)果表明,任務(wù)管理的硬件實現(xiàn)保持了系統(tǒng)調(diào)用的正確性,同時減少了系統(tǒng)調(diào)用的執(zhí)行時間、降低了處理器系統(tǒng)開銷。
2021-04-26 06:14:59
PH1013-2840庫卡機器人KUKA主機維修KUKA驅(qū)動器模塊維修C4庫卡機器人驅(qū)動電源維修KPP600 3X64 KUKA機器人配件維修北京KUKA庫卡機器人模塊維修 KRC4 KPC4機械行業(yè)維修:西門子系統(tǒng)、法那克系統(tǒng)、沙迪克、FIDIA、天田、AMADA、友嘉、大宇系統(tǒng);加工中心、..
2021-09-08 07:30:00
本沒計以DSP和CPLD為主體,構(gòu)建電池管理系統(tǒng)的硬件平臺,并在DSP內(nèi)部嵌入μC/OS-II實時操作系統(tǒng),可大大提高系統(tǒng)的穩(wěn)定性和實時響應(yīng)能力,增強系統(tǒng)的可擴展性和可移植性。
2021-05-18 06:28:15
怎么把C程序聯(lián)起來變成一個系統(tǒng)? 管理員{:soso__2911846579514147439_2:}
2011-08-24 09:14:55
怎樣用Visual C++編程工具設(shè)計出一種快速虛擬示波器試驗系統(tǒng)?從而實現(xiàn)高速數(shù)據(jù)的采集和動態(tài)波形的顯示。
2021-04-09 06:43:52
怎么彈出file文件管理窗口
2014-08-29 17:18:22
如題,新買的V1.8的板子 在晶振Y1旁邊 C3和C4 沒有焊接電容 這個算正常嗎?
2019-04-26 02:00:53
早上好,我想在我的項目中使用XC95144XL CPLD。從那里我明白我需要使用ISE設(shè)計工具。所以我試著安裝它。事情是我的Windows帳戶沒有管理員權(quán)限。要安裝它,Windows 10會要
2019-01-07 10:58:02
板子電路圖的C3 C4接的是22pf電容 為什么板子實際卻沒接這兩個電容??
2020-06-16 09:00:20
求一個C4***的爆炸模仿音效,要STC98c52的,球大神,在線等。。
2014-11-21 12:33:11
我看NI有Robotics Toolkit for KUKA KR C2的附加包,這個怎么用啊?如何和kuka機器人建立通訊啊?是Tcp接口嗎?
2023-10-21 20:59:28
使用avrstudio軟件仿真時,只有匯編語言窗口,沒有c語言窗口,這是為什么?請專家解釋一下,謝謝!
2013-05-02 19:05:39
轉(zhuǎn)stemwin教程本期教程開始講解STemWin的核心內(nèi)容窗口管理器。通過這幾期教程,大家應(yīng)該明白最基本的窗口管理器知識。了解了這些基本的通信機制后,再學(xué)習(xí)控件的使用時,就會事半功倍。本期
2016-10-15 16:27:47
轉(zhuǎn)stemwin教程為了幫助大家更好的理解窗口管理器的回調(diào)和消息機制,本期教程專門做了三個相關(guān)的例子,幫助大家更好的理解。 34. 1用戶自定義消息類型實例 34. 2 桌面窗口回調(diào)函數(shù)實例 34. 3 官方WM_Redraw.c實例 34. 4 總結(jié)
2016-10-16 10:43:41
轉(zhuǎn)stemwin教程為了幫助大家更好的理解窗口管理器的回調(diào)和消息機制,本期教程專門做了三個相關(guān)的例子,這三個例子全部來自官方。 35. 1官方WM_Sample.c實例 35. 2 官方
2016-10-16 10:47:37
問題代碼:[C++] 純文本查看 復(fù)制代碼#include "stdafx.h"#include using namespace std;//基類class point
2019-11-06 00:49:43
你好!CY8C29466-24SXI程序燒寫用什么工具?還有燒寫管理軟件?
2024-02-22 06:57:06
mini板子的2.4G程序中,為什么NRF24L01是初始化A1 A2 A3 A4 C4,而spi初始化卻是初始化端口A5 A6 A7呢??
2020-04-13 20:57:17
請問該圖中的C4電容兩端的電壓怎么求,希望能有詳細(xì)點的解答過程,希望大神們不吝賜教。
2018-07-28 14:49:55
C1、C2?C3?C4?本人水平不夠,提的問題簡單,請不家?guī)兔χ笇?dǎo)下。。。非常感激!
2013-12-27 16:39:19
晶振12M,電感138nh,有公式可以計算C2 C3 C4?嗎
2016-08-27 01:24:01
/ CommonConstants.SUB_WINDOW_ASPECT_RATIO;
// 計算子窗口起始坐標(biāo)
let moveX = (screenWidth - windowWidth) / 2;
let moveY
2024-01-12 17:51:18
GPS工具箱(坐標(biāo)轉(zhuǎn)換,線路設(shè)計)
2010-02-08 09:52:34 124
124 圓曲線坐標(biāo)計算程序_軟件工具【基本介紹】 可計算圓曲線帶有緩和曲線中、邊樁坐標(biāo)及切線方位角。 1、本軟件可計算圓曲線帶有緩和曲線中、邊樁坐標(biāo)及切線方位角,若只需計算圓曲
2012-02-26 19:55:0359 KUKA機器人TCP(工具中心點)設(shè)定.
2015-12-23 14:50:4936 易語言是一門以中文作為程序代碼編程語言學(xué)習(xí)例程:易語言-取光標(biāo)(插入符)坐標(biāo)模塊+窗口光標(biāo)跟隨例程
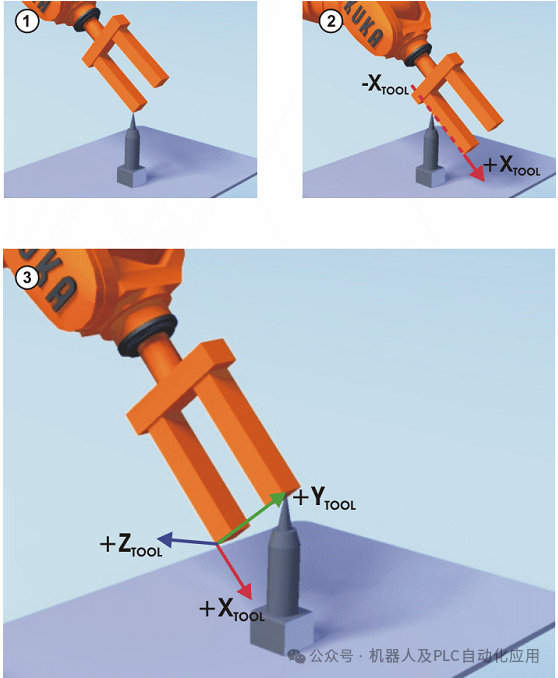
2016-06-07 10:20:211 KUKA機器人工具坐標(biāo)系的建立執(zhí)行方法:將待檢測的工具安裝在法蘭上,找出一個合適的參考點 它可以是固定在工作空間的某一參考芯。
2017-10-16 15:15:348 iDTronic推出新款安卓RFID移動讀取器C4 Red。該設(shè)備支持移動設(shè)備管理(MDM),Android for Work及其他企業(yè)移動管理(EMM)系統(tǒng)。該公司稱,該設(shè)備防護等級為IP65,適用于工業(yè)場景。
2019-01-11 14:42:36 740
740 本文檔的主要內(nèi)容詳細(xì)介紹的是庫卡編程資料入門課件庫卡機器人基礎(chǔ)教程和庫卡C4編程指南及焊接機器人教程合集免費下載包括了:KUKA基礎(chǔ)培訓(xùn)之1-機器人系統(tǒng)的結(jié)構(gòu)和功能,KUKA基礎(chǔ)培訓(xùn)之2-機器人運動
2019-04-22 08:00:0040 現(xiàn)場應(yīng)用日漸趨向全自動智能化,對人機協(xié)作的需求更加旺盛,KUKA LBR iiwa 機器人的身影也出現(xiàn)在各種適用場合。有人可能會有疑問:它與 KR C4 機器人有什么區(qū)別?
2019-07-08 15:07:591740 IAR for ARM系列教程(二)_主窗口與工具欄的描述
2020-03-20 14:35:243370 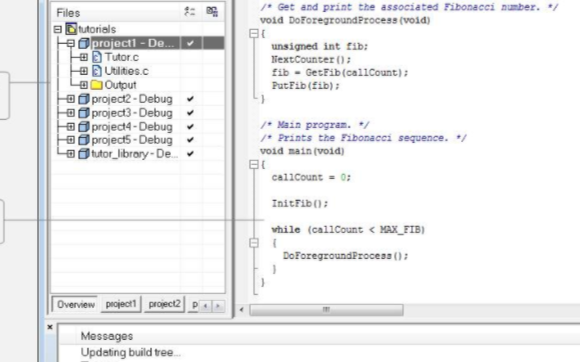
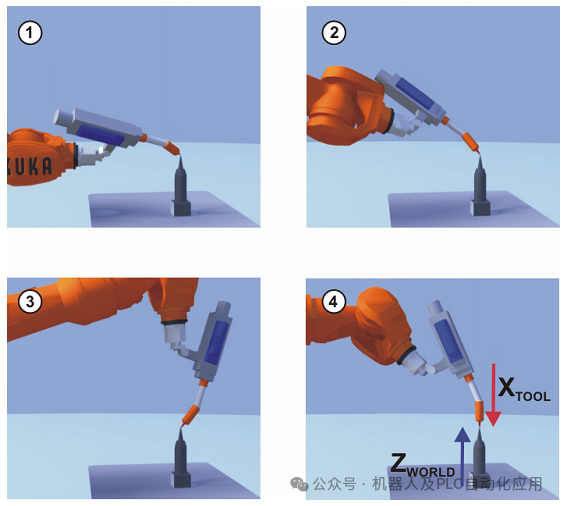
我們通過KUKA計算器或著運算程序可以得出:這個X向的偏差可以使工具坐標(biāo)的X偏移9.848,Y方向偏移1.736A旋轉(zhuǎn)10.0這就偏差的換算。表面上是工具的X方向 偏差,但是如果你想消除這個偏差你需要改變TOOL坐標(biāo)的X,Y,和A來實現(xiàn)。
2020-05-10 10:22:506631 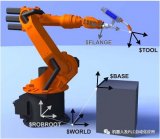
通過一個固定參考點的工具坐標(biāo)系的測量分為2步:首先確定工具坐標(biāo)系的TCP點,然后確定工具坐標(biāo)系的姿態(tài)如表8-7所示
2020-06-30 16:03:407860 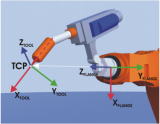
在 KR C4 上安裝 PROFINET 選項 KUKA系統(tǒng)軟件8.2或VW系統(tǒng)軟件8.2以上: 1.連接通過控制器上提供使用的一個網(wǎng)絡(luò)端口 KLI (DualNIC) 實現(xiàn)。 2.工業(yè)以太網(wǎng)協(xié)議
2020-10-27 18:11:446352 
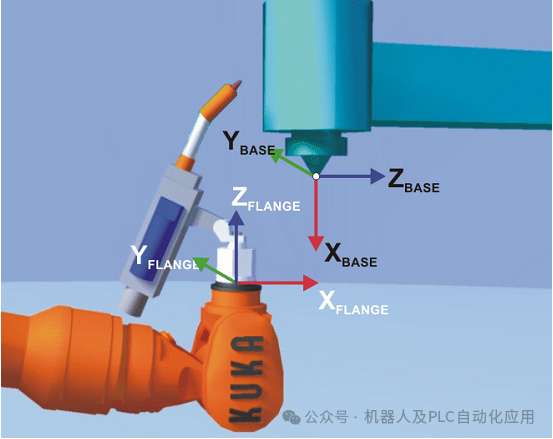
在工業(yè)機器人的操作、編程和調(diào)試時坐標(biāo)系具有重要的意義。在機器人控制系統(tǒng)中定義了下列坐標(biāo)系: ROBROOT 機器人足部坐標(biāo)系 固定位于機器人足部。 是機器人的原點。 是世界坐標(biāo)系的參照
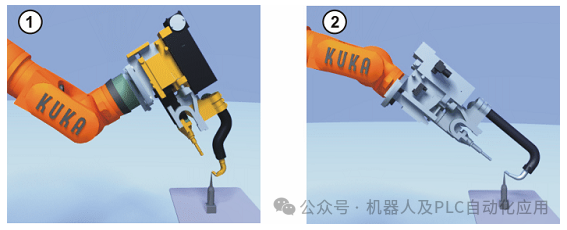
2020-12-23 17:41:204552 工具坐標(biāo)的特點及用途 機器人控制系統(tǒng)通過測量工具 (工具坐標(biāo)系)識別工具頂尖 ( TCP? - Tool Center Point,即工具中心點 )相對于法蘭中心點位于何處以及其方向如何。 因此
2021-01-19 09:17:359282 STM32CubeMX 系列教程之 STM32CubeMX 窗口及 STM32PackCreator 工具介紹,內(nèi)附詳細(xì)圖文介紹。
2021-12-14 18:51:1925 PH1013-2840庫卡機器人KUKA主機維修KUKA驅(qū)動器模塊維修C4庫卡機器人驅(qū)動電源維修KPP600 3X64 KUKA機器人配件維修北京KUKA庫卡機器人模塊維修 KRC4 KPC4機械行業(yè)維修:西門子系統(tǒng)、法那克系統(tǒng)、沙迪克、FIDIA、天田、AMADA、友嘉、大宇系統(tǒng);加工中心、..
2022-01-12 10:39:4011 KUKA C4 機器人報:KSS13012<{總線識別號}>ECat Stack初始化時出錯可能的原因1.原因:在VorkVisual項目中RDC
2022-03-17 09:55:195444 U2C 文字轉(zhuǎn)碼工具,窗口繪制工具emwin免費下載。
2022-03-25 15:35:3412 KUKA 8.2系統(tǒng)遠(yuǎn)程連接步驟介紹,實現(xiàn)遠(yuǎn)程訪問需要在KLIconfig.xml文件里進(jìn)行更改設(shè)置.
2022-07-27 15:56:591354 結(jié)構(gòu)類型 FRAME 的變量指明基于 WORLD 坐標(biāo)系的 ROBROOT 坐標(biāo)系位置。
2022-10-26 11:16:08991 SynchroMove軟件在 機器人D盤中的KUKA_OPT文件夾中。
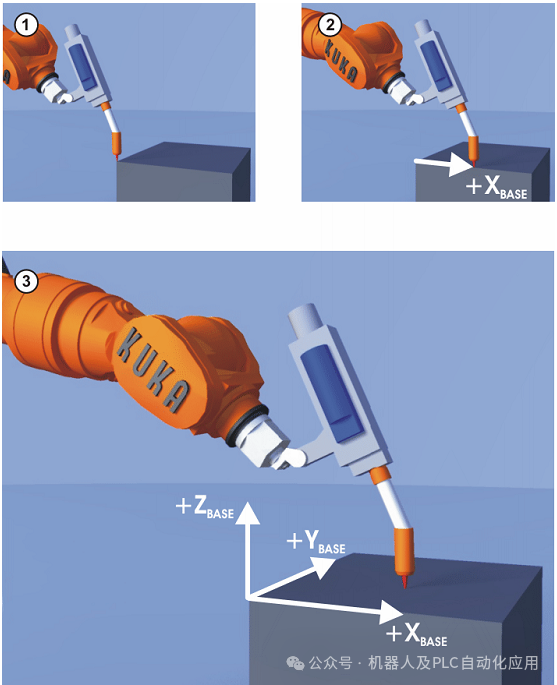
2022-11-29 09:55:111061 是一個可自由定義、用戶定制的坐標(biāo)系說明基坐標(biāo)在世界坐標(biāo)系中的位置。用于測量工件和裝置。
2022-12-27 15:29:414560 可以參照基坐標(biāo)對這些點示教。如果必須移動基坐標(biāo),例如由于工作面被移動,這些點也隨之移動,但不必重新進(jìn)行示教。
可以保存多少 BASE 坐標(biāo)系取決于 WorkVisual 中的配置。默認(rèn):32 個 BASE坐標(biāo)系。變量:BASE_DATA[1 … 32]。
2023-04-19 12:48:422143 測頭系統(tǒng)是三坐標(biāo)測量機的數(shù)據(jù)采集傳感器系統(tǒng),測頭精度的高低決定了坐標(biāo)測量機的測量重復(fù)性。三坐標(biāo)測量機的功能、工作效率、精度與測頭密切相關(guān)。在對工件進(jìn)行測量時,三坐標(biāo)測量機能夠根據(jù)測頭系統(tǒng)探測工件,返回工件表面的點數(shù)據(jù),通過三坐標(biāo)的軟件系統(tǒng)計算各類幾何形狀、尺寸等。
2022-11-25 16:15:53510 
電子發(fā)燒友網(wǎng)站提供《Elxflash離線工具窗口.zip》資料免費下載
2023-07-24 15:00:200 電子發(fā)燒友網(wǎng)站提供《Elxflash離線工具窗口下載.zip》資料免費下載
2023-07-29 10:17:560 智能工具管理系統(tǒng)-RFID工具管理系統(tǒng) 智能工具可視化管理系統(tǒng)(智工具DW-S308)是依托互3D技術(shù)、云計算、大數(shù)據(jù)、RFID技術(shù)、數(shù)據(jù)庫技術(shù)、AI、視頻分析技術(shù)對RFID工具進(jìn)行統(tǒng)一管理、分析
2023-09-14 09:38:51488 
坐標(biāo)系是我們非常熟悉的一個概念,也是機器人學(xué)中的重要基礎(chǔ),在一個完整的機器人系統(tǒng)中,會存在很多坐標(biāo)系,這些坐標(biāo)系之間的位置關(guān)系該如何管理? ROS給我們提供了一個坐標(biāo)系的管理神器——TF。 機器人
2023-11-22 17:20:23463 
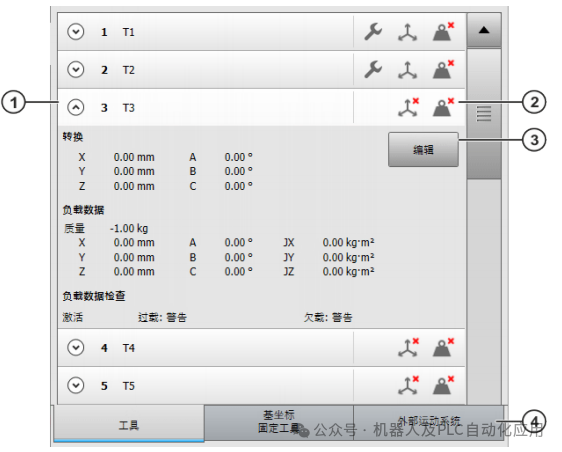
“概述”區(qū)域顯示所有現(xiàn)有的TOOLS、BASES和外部運動學(xué),每個都在一個單獨的選項卡中。
2024-01-15 10:44:23178 
窗口子系統(tǒng)位于 fundationwindowmanager 目錄下,提供對窗口與 Display 管理的基礎(chǔ)能力 概覽 窗口是什么 每個 Ability 在創(chuàng)建時都會創(chuàng)建一個主窗口,并且為該窗口
2024-03-05 09:45:42108 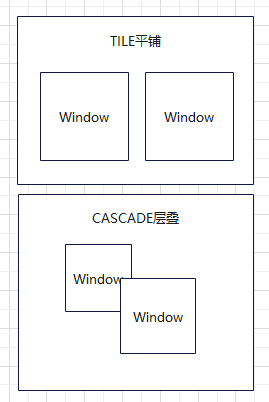
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論