今年以來,由中科院沈陽自動化所自主研制的深海自主水下機器人“潛龍二號”和自主遙控混合式水下機器人“海斗”號先后成功完成試驗性應用,前者取得我國大洋熱液探測的重大突破,后者在我國首次萬米深淵科考航次中成功應用,最大下潛深度10767米。
2016-12-22 11:06:43 679
679 為了提高水下機器人的感知能力,基于仿生原理的觸須傳感器被研究人員開發并應用。側線是魚的一個感應器官,可以感知周圍水流的變化,從而幫助魚在黑暗條件下感知周圍的環境。
2022-04-21 15:01:488765 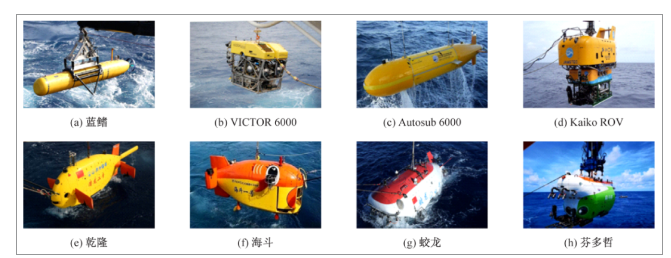
機器人等特種機器人:場地機器人、專業清潔機器人、醫用機器人、物流機器人、檢查維護保養機器人、建筑機器人、水下機器人、國防營救及安全應用機器人等核心部件:控制器、減速機、伺服電機、檢測設備、焊割設備、噴涂
2016-10-10 16:30:56
,就能依靠經驗,學習到很多更好的作業方法,并且熟練掌握。 機器人傳感器可分為機器人內部傳感器和機器人外部傳感器兩種。機器人內部傳感器的功能是測量運動學和動力學參數,其提供信息的目的是控制機器人按規定
2018-01-03 17:09:03
(External Sensons)。下面將以此為主,結合機器人傳感器其它分類方法進行闡述。 機器人產業近年來發展很快,2012年全球產量為16萬臺,歐、美、日等工業發達國家機器人市場已比較成熟,已處于平增長階段
2018-11-08 15:55:32
本帖最后由 eehome 于 2013-1-5 10:05 編輯
水下機器人水面控制臺通常基于計算機平臺,體積較為龐大,不便于移動。但在某些情況下,如水下機器人水面回收或者水面測試載體各種航行
2011-03-08 14:21:34
有幸獲得了省賽一等獎,實屬來之不易。中途也遇到了很多的困難,在賽后稍微做一下總結,也算分享一些經驗提示:以下是本篇文章正文內容,僅涉及到設計部分一、水下機器人管道巡檢組內容簡述水下管道巡檢組是做一個水下機器人,需要實現巡檢管道、識別吸附物、清除吸附物和回收吸附物等功能。二、功能實現樹莓派+ard
2022-01-11 06:51:45
傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環境中完成一定的作業功能,是因為它能夠通過傳感器感知外部環境信息和自身狀態,獲得反饋信息,實現系統的閉環控制。目前在仿人機器人
2019-09-18 06:17:46
需求可以完美契合。有纜水下機器人電源構架與系留無人機系統類似,有纜水下機器人系統分為水面部分和水下部分,兩部分通過線纜連接,水面部分一般是船載或地面電源和控制部分,水下部分一般由傳感器,機身等構成。水下機器人
2019-08-16 11:15:31
無論是傳統的工業機器人系統,還是當今最先進的協作機器人(Cobot),它們都要依靠可生成大量高度可變數據的傳感器。這些數據有助于構建更佳的機器學習(ML)和人工智能(AI)模型。而機器人依靠這些模型變得“自主”,可在動態的現實環境中做出實時決策和導航。
2020-08-05 07:08:21
項目名稱:水下智能機器人試用計劃:1.對BeagleBone Black硬件資源進行測評2.通過燒寫ubuntu系統 結合硬件資源進行軟硬件測試3.基于ubuntu,stm32,電力貓三個硬件構建水下機器人4.項目開陣。按時間完成計劃5項目調試 資源分享。預計成果:發表帖子分享項目開展過程,結果,經驗。
2017-07-04 16:55:05
摘要:本文主要介紹如何根據國外開源項目(OpenROV)開始自己DIY一個水下機器人。關鍵詞:水下機器人 DIY背景水下無人機在近兩年大熱,經常出現在各種眾籌平臺,在大學生的挑戰杯等比賽上也能見到其
2017-07-25 20:23:28
項目名稱:漁業衛士-基于圖像識別的多自由度水下機器人試用計劃:1、申請理由希望早日接觸、應用國產的鴻蒙系統。2、項目名稱漁業衛士-基于圖像識別的多自由度水下機器人3、計劃(1)約三個月時間,應用該款
2020-09-25 10:11:50
項目名稱:水下機器人探測項目試用計劃:1、我是廣東海洋大學嵌入式工作組的成員 丘子楓,現在是大三的學生。從大一開始就從單片機開始慢慢接觸嵌入式的東西。參與設計的了我校首個水下機器人,并且從大二的時候
2017-06-01 09:45:11
分享一下水下機器人的電機控制(針對的是直流無刷電機+雙向電調的模式)。其實一句話就說明白了,頻率50hz的方波,1.5毫秒占空比是初始化;假如1~1.5毫秒正轉,1.5~2毫秒反轉,反之亦然。1.5
2021-09-16 08:43:15
蔣海林,賈哲,張國良,張維平(第二炮兵工程學院陜西 西安710025)0引言傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環境中完成一定的作業功能,是因為它能夠通過傳感器
2019-06-21 07:04:37
智能水下機器人在海洋石油開發、礦物資源開采、打撈和軍事等方面都有廣泛的應用前景[1][2][3]。水下機器人已經開始取代過去由載人潛器和潛水員所承擔的工作,尤其是在大深度和危險區域發揮了更大的優勢。
2019-10-29 07:22:16
系統的幫助下,自主完成人類指定的工作,如果傳感器的精度差,會直接影響機器人的作業質量,如果傳感器不穩定或者可靠性不高,很容易導致智能機器人出現故障,輕者導致工作不能正常運行,嚴重者還會造成嚴重的事故
2015-01-20 14:56:46
軟件構建微小的控制系統,在機器人的末梢或手臂部分安裝必要的傳感器,來控制機器人的手臂運動,監測工作中的異常情況,同時也保證了安全生產的進行。而在當下機器人傳感器系統設計中,下一步的趨勢將會是借助傳感器
2015-02-04 16:35:49
控制和通信 IC 的發展在實現下一代的機器人中起到重要作用。然而,這些復雜的現代機器人的核心是許多新的、小型化和低成本的傳感技術的出現與融合。對實現下一代機器人至關重要的幾項關鍵傳感器技術包括磁性位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環境傳感器和電源管理傳感器。
2019-07-31 07:46:31
瑞士聯邦理工學院 Pascal Buholzer 和他的學生設計的Sepios水下仿生機器人,解決螺旋槳推進器的水草纏繞和噪音問題。
2015-01-13 15:52:06
公司的酷卡機器人有一個調零的程序,就是把機器人移動靠近到防護圍欄上的一個傳感器,直到觸發傳感器動作。在機器人發生碰撞后就提示要求調零,但一直沒搞明白這樣做目的是什么,希望知道的朋友指點一下。
2015-01-14 14:35:30
0引言傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環境中完成一定的作業功能,是因為它能夠通過傳感器感知外部環境信息和自身狀態,獲得反饋信息,實現系統的閉環控制。目前在仿
2019-07-29 06:09:58
水下避障傳感器詳細參數解答請聯系曾工18668003652
2022-01-25 15:40:11
針對自治水下機器人(AUV)所處的真實海洋環境,通過分析長距離航行時AUV局部規劃必須考慮的各種因素和可能產生的影響,設計一種局部規劃器的結構,提出基于模糊邏輯的解決方案
2009-04-18 09:50:42 31
31 本文研究設計了一種基于PC 機與單片機的水下作業控制系統。本控制系統采用的是PC 機與單片機串行通訊的方式,來實現對自動工具庫的可視化控制。在對本計算機控制系統進行介
2009-07-30 11:37:5312 水下作業系統是運動學冗余系統,本文將模糊推理方法融入基于任務優先運動學控制算法,對系統載體與機械手進行協調運動分配,同時對系統多個任務進行優化。通過帶有3自由
2009-12-14 16:25:4112 設計安裝自動平衡裝置作為物理仿真系統對水下機器人姿態控制進行實驗研究,給出了實驗系統的結構。結合具體系統設計了H∞/H2 魯棒控制器,分析了調節設計參數對系統性能
2009-12-28 11:17:2817 本文介紹了一種基于單片機與觸摸屏的水下機器人便攜式遙控單元設計方法,主要包括便攜式遙控單元硬件結構、單片機與觸摸屏之間的通信以及遙控單元軟件設計等內容。通過該便
2010-02-23 13:53:4720 提出一種分層路徑規劃算法來解決大范圍海洋環境下的智能水下機器人(AUV)的全局路徑規劃問題。該算法將
2010-03-03 14:52:0118 水下機器人是建設海洋強國、捍衛國家安全和實現可持續發展必需的利器。我國水下機器人研制經過多年追趕,部分技術已與國外看齊,亟待進一步整合產業鏈條資源,積極推動水下機器人成果轉化,應對新一代全海深、全海域、組合化水下機器人研發。
2016-12-22 09:40:121167 基于嗅覺的水下機器人化學羽狀物追蹤定位方法_鄧薇
2017-01-08 13:38:530 自治水下機器人自適應滑膜控制_吳寶舉
2017-01-30 23:17:315 依靠NI myRIO控制的4塊鰭,敏捷的水下機器人Sepios能夠向6個方向移動 這個方案將向您演示一個采用NI MyRIO控制的4鰭水下機器人方案,這個由學生制造的Sepios水下機器人依靠
2017-02-08 20:24:38475 深海交匯拍攝,不同類型裝備協同作業,同時對南海一冷泉區進行了精細調查,取得了大量生物樣品。 亮點一:水下機器人深海約會 在1000多米深的黑暗海底,一個根據預編程自主航行的機器人穿梭而過,能用另外一個機器人在海底準確找
2017-09-20 10:13:541 我國自主研發的自治式水下機器人探索號,24日在南海北部開展首次試驗性應用,預計水下作業時間20小時。24日上午8時,在科學號遠洋綜合科考船的后甲板上,科考隊員做好了探索號下潛的所有準備工作。探索
2017-09-20 11:31:1714 無人機來源于航模,航模有很多開源的項目,而水下機器人開源的項目非常少,如果要從事水下機器人的創業,很多設計都需要從零開始。
2017-09-22 07:29:2614016 隨著人工智能大潮的逐漸滲透,近年來各個國家對海洋資源越來越看重,紛紛加大了水下機器人的研發投入。美國、日本、法國作為最早一批研制水下機器人的國家,如今早已掌握了先進的水下機器人技術。
2017-09-27 15:10:42876 自主式水下機器人(Autonomous Underwater Vehicles,AUV)代表了未來水下機器人技術的發展方向,是當前世界各國研究工作的熱點。對AUV的實時監測和控制是AUV能否安全高效
2017-10-25 11:46:351 針對傳統的機器人控制器設計容易受到水流沖擊壓力不定的因素干擾,導致控制器穩定性差、工作效率低下的問題。提出一種6 自由度下的水下機器人控制器抗干擾設計方法,通過水下機器人 自由度空間動力學方程,及其
2017-10-28 13:04:499 水下結構檢測與清污機器人是有纜遙控水下機器人(Remotely Operated Vehicle.ROV)的一種,它具有機動靈活、動力充沛、作業深度大、續航力強和環境適應性強等特點,被廣泛應用于水下
2017-11-10 10:26:594 以主推加舵控制的小型自治水下機器人為研究對象,建立了水下機器人的數學模型并進行了分析。根據機器人結構的特點,對模型進行了必要的簡化。設計了機器人的運動控制系統。以成功研制的無纜自治水下機器人(AUV
2017-11-12 09:43:1710 ,在短短2年的時間內,完成了水下機器人Poseidon I的研發到量產。而今研發水下機器人的公司就開始如雨后春筍般多了起來,市場印證了黃俊平的行業判斷,也側面印證了水下機器人市場大有可為。
2017-11-30 15:57:206564 為了實現對水下機器人周圍環境的監測,提出了一種基于PC104與C8051F120的水下機器人環境監測系統設計方案,并完成系統的軟硬件設計。
2018-03-21 09:23:002013 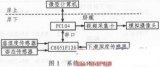
針對水下機器人進行水下檢測時的實時控制和監控問題,對水下機器人的推進器結構、運動方式、通訊方式、機體狀態顯示方式、運動控制方法等方面進行了研究,對水下機器人實現高效水下檢測所需的各功能需求進行了歸納
2018-03-14 15:36:246 隨著海洋資源的不斷開發,水下機器人作為一種先進的探索被不斷應用到該領域,得到了快速的發展以及高度的重視。
2018-07-25 17:11:008306 開架式通用水下機器人開源搭建手冊
2018-05-04 17:20:3311 從“上天”到“下海”,水下機器人作為機器人新形態的出現也為人工智能的發展拓寬了領域,而作為發展的新方向,其也應“大有可為”。
2018-05-26 10:35:0020912 Martitme 公司和國家石油公司聯合與挪威科技大學合作,研發出了一種 水下蛇形機器人 ,這款機器人的目的就是取代笨重的船只和設備進行水下清理工作。
2018-05-22 00:23:005181 反觀當下,雖然消費級的水下智能機器人已開始在國內上開始流行,并主要用于潛水運動、海釣捕魚、水下攝影,但國內品牌的水下機器人產品卻始終不能在海內外的中高端民用市場獲得用戶青睞。畢竟,其應用空間在危險的海洋,無論是使用環境還是使用壽命都必須承受嚴酷的考驗。
2018-05-23 18:24:144574 水下機器人也稱無人遙控潛水器,是一種工作于水下的極限作業機器人。由于水下環境惡劣危險,人的潛水深度有限,所以水下機器人成為開發海洋的重要工具。水下機器人都有哪些鮮為人知的“十八般武藝”?一起來看看吧。
2018-07-07 09:28:3014474 近日,南方電網調峰調頻發電有限公司水下機器人項目完成最終驗收,該機器人能在水下隧洞遠距離航行檢測,可排查水工設施安全隱患,為后續水下作業提供支撐,大大降低電廠安全檢查成本,保障了電網的安全可靠運行。
2018-08-07 11:04:117297 水下環境復雜多變,性能優良、操作靈活的水下機器人是當今進行深海作業必需的設備。此次代表中國參賽的哈爾濱工程大學E唯協會的成員,帶著水下機器人第八次參賽。他們從2011年開始參加比賽,2012年獲得第四名,2013年第五名,2016年第六名,2017年第四名。
2018-08-08 15:12:534438 8月6日,第21屆國際水下機器人競賽在美國圣迭戈落幕,哈爾濱工程大學E唯代表隊奪得冠軍。這是我國高校首次在世界頂級水下機器人大賽中奪冠。
2018-08-08 16:43:405215 潛水俠針對這一市場,推出了便攜式水下機器人產品Nemo,以有纜的方式在水下行駛,船上或陸地的人可以通過移動設備控制Nemo的運動、拍攝照片視頻,也可以帶上VR設備,通過頭部的運動直接控制Nemo運動。Nemo下潛深度可達100米,運行續航時間3小時。
2018-08-09 09:37:002809 隨著技術的逐漸成熟和消費水平的提升,人們對水下領域的探測需求持續持續增長,民用水下機器人市場將持續穩定增長。數據顯示,2020年中國民用水下機器人市場規模將達到580.65億元,其中資源勘查類水下機器人
2018-08-16 14:34:5211082 水下機器人的工作環境是不同的水域,水下狀況多變,對機器人的技術要求提出了更高的挑戰。水下機器人制造技術密集性高,主要包括仿真、智能控制、水下目標探測與識別、水下定位、通信、能源系統六大技術。與發達國家相比,我國水下機器人制造的一些關鍵材料與技術研究領域仍有一定的差距,還需不斷發展突破。
2018-09-08 09:44:131395 據報道,當涉及到水下機器人時,基本上有兩種類型 - 在自行巡航時收集數據的自主水下航行器(AUV)以及可以在實時被控制并同時執行任務的遙控水下機器人 (ROV)。總部位于德克薩斯州的Houston Mechatronics公司的Aquanaut將上述兩種產品相結合。
2018-09-17 15:02:223145 據報道,全球首款五驅微型水下機器人“鮫GLADIUS MINI”19日在2018云棲大會上首發。它擁有模型船的造型,能深潛至水下100米,即時拍攝并傳送照片至手機上。
2018-09-20 09:41:451770 日前,由我國自主研制的“海星6000”有纜遙控水下機器人完成首次科考應用任務,并在多個海域獲取了環境樣品和數據資料。期間,“海星6000”最大下潛深度突破6000米,再創我國有纜遙控水下機器人(ROV)的最大下潛深度紀錄。
2018-11-01 09:43:582073 唐蕃古道,利用智能水下機器人對苦拔海(豆錯)、河厲橋(龍羊峽)水質信息探測與采集,對三江源區水道與路網的變遷特征進行研究,這是國內首次利用智能水下機器人對高原地區水域進行水質信息探測與采集。
2018-11-19 14:36:321494 我國是海產養殖大國,但水下作業一直是難題。如鮑、海參、扇貝、海螺、海膽等底播海產品,從播種、養護到采捕都需要人力,工具也比較簡單,不僅勞動強度大,生產效率低,而且還有較高的安全風險。而水下機器人的發展有望解決這些問題。
2019-01-25 17:22:214299 本文結合水下機器人(ROV)在陽江核電廠取水口海生物監測中的應用實例,介紹了ROV的原理、系統組成、主要功能、作業流程,總結出國產水下機器人( ROV)用于核電廠冷源取水口海生物監測的優勢,同時展望水下機器人在我國核電行業應用的廣闊前景。
2019-05-08 09:38:425969 隨著人工智能的快速發展,在惡劣的工作環境下,用機器人替代人工的做法越來越廣泛,在2019數博會人工智能全球大賽武漢分賽區比賽中脫穎而出的大智若魚——子母型多功能水下機器人便是其中之一。
2019-05-16 10:32:11962 近日,RE2 Robotics公司宣布已獲得300萬美元的資金,用于開發靈巧的水下機器手。
2019-05-28 15:43:403762 利用人工智能幫助水下機器人適應各種極端環境,以完成勘察水中建筑安全狀況的任務。
2019-07-11 15:52:18913 水下機器人是高技術的集成,雖然水下機器人本體的各種材料及相關技術已基本成熟,但隨著水下機器人向大范圍、大深度、長續航、多功能的發展,一些關鍵技術還需研究解決
2019-07-17 16:15:2512531 中車株洲所旗下的SMD公司,在英國阿伯丁舉行的SPE Offshore Europe展會上,發布了一款具有超強作業能力、綠色環保工作級電驅動水下機器人(簡稱ROV)——QUANTUM/EV。
2019-09-05 09:36:26716 水下滑翔機水下導航定位精度的提高對于滑翔機完成海洋環境觀測、資源探測、海洋目標識別與定位等任務至關重要。
2020-01-29 17:04:002290 由于水下環境惡劣危險,人的潛水深度有限,所以水下機器人已成為開發海洋的重要工具。20世紀后半葉誕生的水下機器人,在機器人學領域屬于服務機器人中的特種機器人類別。
2019-12-26 10:36:552414 水下機器人是一種技術密集性高、系統性強的工程,隨著應用領域的不斷擴大,水下機器人會向著體積更小、兼容性更強、智能化程度更高的方向發展。
2020-01-24 16:59:00752 水下機器人在海洋開發、勘探水下環境以及未來水下戰爭中發揮著重要的作用,但是它的續航能力有限,因此在海底建設供電系統是十分有必要的。
2020-02-04 16:08:052294 韓國媒體稱,日前,韓國最大的集裝箱航運公司現代商船(HMM)宣布,計劃利用水下機器人清潔船體。
2020-03-04 08:49:10448 HMM方面表示,在與韓國水下機器人制造商TAS Global簽署合作協議后,將使用水下自動機器人清潔船體水下部分表面。
2020-03-04 11:47:412287 有一天,水下機器人可能會非常逼真地模仿魚一樣的生物,它們不僅能騙過真正的動物本身,也會騙過人類。這種能力可以獲得各種信息,從魚類的健康狀況到外國船只的位置。
2020-03-23 10:54:22549 相對于陸地,人類在水下環境工作的困難程度和危險程度都要更高。特別是海洋環境更為復雜,也更容易遇到意外風險,所以一些水下作業用水下機器人取得人類來進行是必要的。
2020-05-10 15:14:55554 此次現場賽主要針對海洋環境監測、海上防險救生等需求,在真實開放的海洋環境條件下對水下機器人作業性能進行評測:針對水下機器人巡航與智能能力(感知、控制、驅動、通訊)進行考察
2020-06-10 16:20:132093 帶有驅動電機、攝像頭、水下機械手及各種作業工具,由水面提供能源進行有纜遙控作業的機器人,可用于海底油氣工程、海洋科考、海上救援打撈、水下鉆井、海底電纜鋪設等多種領域,具體能進行水下機械手抓取,水下結構物拆裝施工,井口打磨清洗以及沉船沉物打撈等各種作業。其纜線可長至6000米甚至10000米。
2020-07-09 18:04:37651 除此以外在水下作業方面,水下機器人的出現與應用也能對水利工程監測、水環境監測、水下設施清潔維護、水下抗洪搶險等發揮出重大價值。有了水下機器人的助力,人們不僅能從水下近距離開展水利建設,更能將水利范圍從河湖拓至海洋。
2020-07-20 10:38:52931 隨著國內海洋石油工程、海洋科考、海洋打撈等領域對水下機器人使用需求的不斷擴大,相關政府部門在項目立項與實施方面水下機器人的產業化發展給予政策傾斜,未來我國水下機器人產業化、規模化進程將會進一步加快。
2020-08-18 10:04:343245 本屆大賽歷時3天,大賽期間還將舉辦“人工智能與水下機器人高峰論壇”,將邀請數名國內相關領域的中國工程院院士以及百余名相關領域知名專家學者、產業界代表,共同針對人工智能和水下機器人領域的尖端課題展開探討。
2020-09-21 17:52:241806 音圈模組水下機器人為生命護航。大家都知道海洋底有很多奇妙的神武等著我們去探索和發現,而且一些水底救援工作要開展,人們潛入到水底是很危險的事情,因此水下機器人就橫空出世了。是能代替人類作業的水下救援及巡檢機器人。
2021-03-24 14:49:00748 近期,武漢長江航道救助打撈局使用深之藍水下機器人完成一次2200米高海拔水下檢查項目。 該水電站位于黃河流域。主要任務是對水電站某機組進水口攔污柵、檢修閘門門槽及相關流道水下檢查,進口水快速閘門
2021-04-09 17:06:302164 是無法進行水下作業、定位、路徑規劃等一系列的任務; 二是水下環境極其復雜多變、干擾多、噪聲大。因此解決AUV在水下的定位是在水下作業的一個重要前提。 真尚有水下定位有方法 真尚有水下高度,航向和姿態測量方案利用寬帶復合傳感器和先進
2021-07-16 16:02:23840 水下機器人行業主要集中在北美、歐洲、中國、日本等國家和地區。目前,中國是最大的生產地區。從消費端來看,2018年中國水下機器人行業占全球銷量的25.07%,中國巨大的市場需求和增長潛力,吸引了幾乎所有國際巨頭在中國開展相關業務。
2022-06-08 11:35:226619 海洋包含著一片似乎無邊無際的有待探索的領土,在全球范圍內繪制這些未知水域的地圖是一項艱巨的任務。自主水下機器人艦隊可能是幫助繪制地圖的寶貴工具,但這些機器人需要能夠在保持高效和準確的同時導航這一雜亂的區域。
2022-08-23 10:15:42880 ROV水下作業仿真平臺適用于海洋工程、海洋科考、水利水電工程等典型領域的ROV作業仿真。通過ROV作業仿真平臺進行作業仿真預演與培訓,可以增強ROV作業安全性,提升作業效率,節約作業成本;
2023-03-03 11:41:061189 L04水下超聲波測距避障傳感器主要應用于水下機器人,安裝在機器人四周。當傳感器檢測到有障礙物時,會將數據快速傳給機器人,通過判斷安裝的方向和返回的數據可做出停止、轉向、減速等一系列操作來實現智能行走。
2023-03-31 15:24:291766 的水質監測解決方案。 在安全方面,河流、海洋、湖泊水底是否有危險物物以及水質好壞情況的檢測也是水下機器人的一個工作,雖然這些任務*在水下完成,但對于一些水下的機器人來說,這并不是什么難題。任何作業都要保證安全*,
2023-04-11 16:26:38222 
水下超聲波避障傳感器主要應用于泳池清潔機器人,傳感器安裝于機器人四周。當傳感器檢測到有障礙物時,會將數據快速傳給機器人。
2023-05-20 10:30:34716 
水下測距傳感器,經過1年多的實驗和實踐,并進行實驗標定后,該傳感器能夠連續實時的測距、顯示和傳輸數據,可用于水下機器人避障防撞偵測、移動機器人進行測距、導航等。如需
2022-01-21 17:11:42313 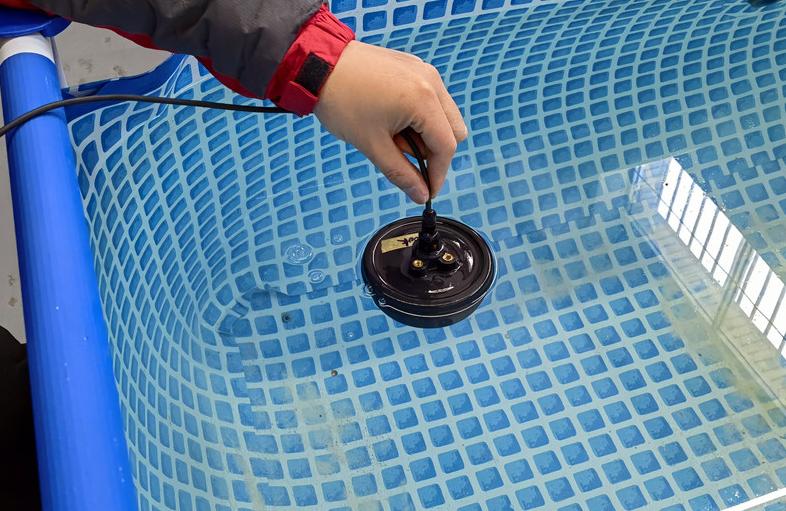
電子發燒友網站提供《水下機器人開源構建.zip》資料免費下載
2023-07-11 10:45:521 隨著服務機器人的技術發展,游泳池水下清潔的機器人在市場上廣受青睞,要實現水下自動規劃泳池清潔路線,離不開性價比高,應用適配的超聲波水下測距避障傳感器。
2023-07-22 09:02:42627 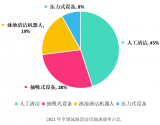
傳感新品 【江西科技師范、南方科技大學:用于水下機器人的抗疲勞導電聚合物水凝膠應變傳感器】 近年來,高靈敏度柔性應變傳感器因其在軟體機器人、醫療保健、智能可穿戴設備等領域的巨大前景而引起了極大的關注
2023-08-03 08:45:03557 
這個“長著三個觸角”的水下機器人看上去是不是很萌?它使用的是一種新型的由三個球形磁耦合矢量推進器組成的推進系統。與傳統的水下機器人使用多個固定推進器來實現多自由度(DOF)推進相比,矢量推進器具有多自由度、寄生推力小,以及效率高等優勢。
2023-08-24 11:21:41913 
近些年隨著技術發展,我國智慧海洋建設飛速發展,目前正推動海洋傳統行業數字化、綠色化、智能化新升級。鰭源科技引領時代發展,與華為、中國移動等伙伴攜手,將AI智能水下機器人與5G網絡相結合,推出全新
2023-09-08 14:18:58242 功率放大器模塊是一種電子設備,它可以將輸入信號的功率轉換為輸出信號的功率。在水下機器人中,功率放大器可以起到驅動電機、傳感器等負載的作用,是實現水下機器人功能的重要組成部分之一。下面將詳細介紹
2023-12-18 16:25:26165 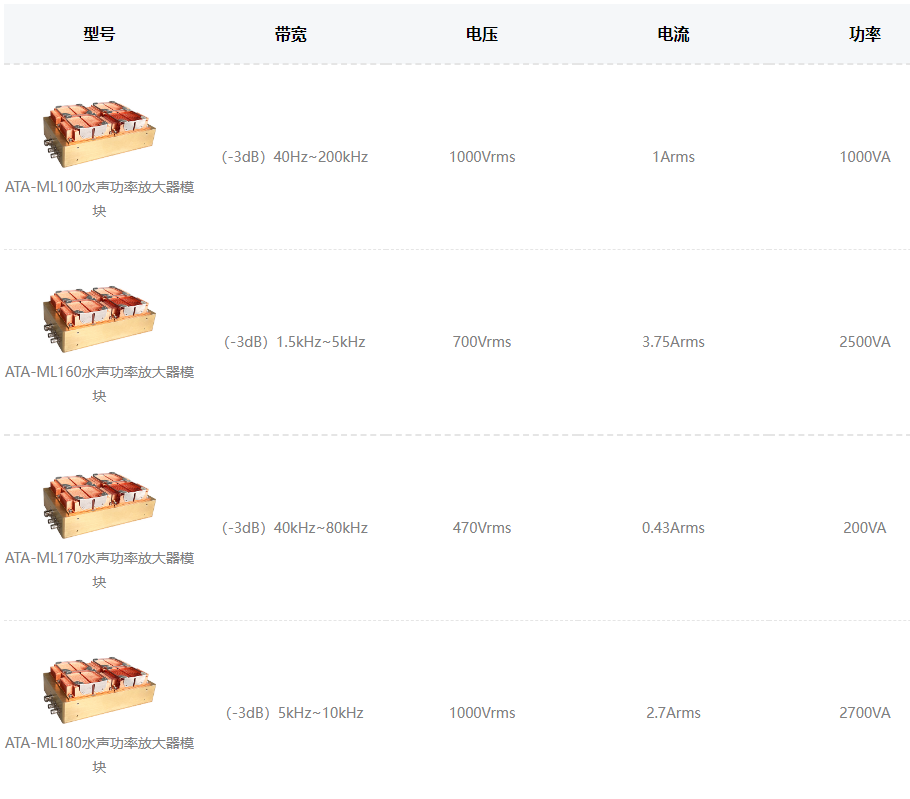
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論