 電子發(fā)燒友App
電子發(fā)燒友App


在線預沖孔冷彎成型線的PLC系統(tǒng)規(guī)劃及調試
主要說明SIMATIC S7-300 可編程控制器在在線預沖孔冷彎成型生產(chǎn)線中的具體應用,并通過貨架冷彎設備對貨架組件的控制精度和產(chǎn)品生產(chǎn)工藝的滿足程度進行驗證分析,具體闡述了冷彎設備的軟硬件設置、主要程序的組成功能、PID控制原理及系統(tǒng)調試特點等。
關鍵詞:可編程序控制器;在線預沖孔冷彎成型生產(chǎn)線;全數(shù)字伺服系統(tǒng)
1、引言
1.1隨著市場對冷彎型材需求量的不斷增長,特別是對有孔冷彎型材的需求,在線預沖孔冷彎成型生產(chǎn)線的設計和制造技術也需要不斷發(fā)展與成熟,如:在線預沖孔孔位分布的高精度演變、產(chǎn)品品種的多樣化和小批量化要求、材料利用率的提升和設備的易操作等方面均對設備的復合化和電氣控制技術提出了更高的要求,本文擬就SIMATIC S7-300PLC在在線預沖孔冷彎成型生產(chǎn)線中的具體應用和軟硬件設置、主要程序的組成功能、PID控制原理及系統(tǒng)調試等方面進行探討。
2、 PLC系統(tǒng)配置
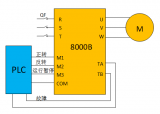
2.1 根據(jù)在線預沖孔冷彎成型的產(chǎn)品加工工藝、單機功能配置及運動分析、設備的操作與維護保養(yǎng)等方面的要求,本機組電氣控制部分采用西門子S7-300PLC,PLC與監(jiān)控系統(tǒng)以及各從站之間的通訊采用PROFIBUS-DP現(xiàn)場總線方式;冷彎成型機組的主動力由SIMENS公司6RA28系列直流調速控制器和直流電機實現(xiàn),為了減少故障排除時間,整線電氣控制系統(tǒng)有啟動提示、故障報警、自動停機,并通過漢字顯示終端,顯示部分故障的詳細內容及提示。
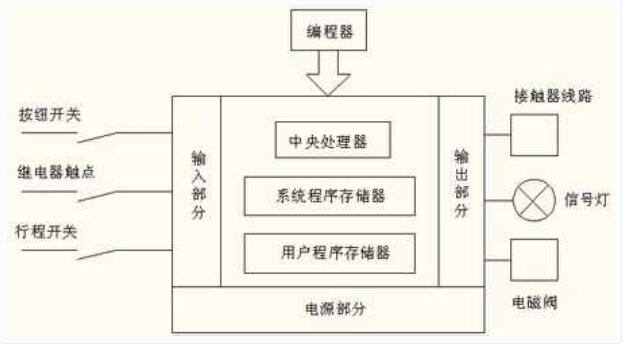
2.2 PLC硬件配置:1)、中央處理單元選用SIMATIC S7-300 CPU315C-2DP一塊,它具有大型的程序存儲容量,并有PROFIBUS-DP主/從接口,可以配制成分布的自動化結構,易于今后的系統(tǒng)擴展。2)、伺服電機定位模塊SIEMENS 6ES7 354一塊,3)、SIMATIC S7-300 OP27一塊,4)、繼電器輸出單元SIEMENS 6ES7 322五塊,5)、SIMATIC S7-300 6ES7 FM350高速計數(shù)模塊一塊,6)、SIMATIC S7-300 PS3075A電源模塊一塊,7)、接口模塊IM153二塊,8)、數(shù)子量輸入輸出模塊SIEMENS 6ES7 321十塊,9)、人機界面TP170A一塊,方便的人機界面服務已經(jīng)集成在S7-300操作系統(tǒng)內,實現(xiàn)從S7-300中取得數(shù)據(jù),S7-300按用戶指定的刷新速度傳送這些數(shù)據(jù),S7-300操作系統(tǒng)自動地處理數(shù)據(jù)的傳送。 10)、PROPHBUS網(wǎng)站一套等。
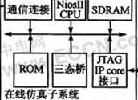
2.3程序設計:SIMENS公司的S7-300PLC程序主要采用結構化的設計方法,各主要功能塊如:PID控制、故障處理、TP170A的通訊接口等均用子功能塊FC實現(xiàn),需要時在主程序OB1中調用,程序結構見圖1,下面主要通過Profibus-DP總線進行通信和控制的交流伺服控制系統(tǒng)來說明S7-300PLC的軟件設計,其程序主要有OB100、OB1、FB40和FB41組成。
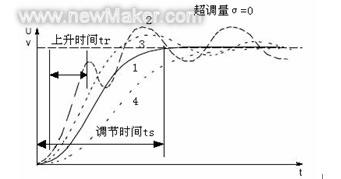
圖1程序結構
2.4 OB100是暖啟動組織塊,系統(tǒng)啟動就調用OB100,主要作用是初始化已經(jīng)打開的背景數(shù)據(jù)塊,為伺服控制器設置輸入/輸出總線地址;如下程序片段:
程序段1:
CALL "POS_INIT" // Initialization of the user DB
DB_NO :=1 // DB number
CH_NO :=1 // Channel number
LADDR :=256 // Module address
RET_VAL:="DBEX".ERR_CODE_INIT// Error code
L "DBEX".ERR_CODE_INIT// Error code evaluation
L B#16#0
==I
R "DBEX".INIT_ERR // Reset error for INIT function
JCNWE
S "DBEX".INIT_ERR // Flag error for INIT function
NWE: NOP 0
程序段2:
OPN "DBEX"
L B#16#0 // Clear DBEX
T DBD0// Begin with DBEX.DBD0
T DBD4//
T DBD8//
T DBD 12
T DBW 16
程序段3:
L B#16#64
T "DBEX".OVERRIDE // Set override to 100%
SET
S "DBEX".SERVO_EN // Set servo enable
S "DBEX".DRV_EN // Set drive enable
S "DBEX".EX3.READ_EN // Set read enable (EX3)
BE
2.5 OB1是主程序塊,根據(jù)實現(xiàn)的各作業(yè)功能編寫出顯示塊、參數(shù)設置塊、工作運行塊、自動循環(huán)塊、動力組調整塊等。這塊程序塊由OB1調用,實現(xiàn)整體和程序的協(xié)調運行,包括功能FC32、功能塊FB40、功能FC37和背景數(shù)據(jù)塊DB40等,其中FC32的功能是定期的讀和更新來自總線上的背景數(shù)據(jù)塊的數(shù)據(jù);功能塊FB40是控制伺服控制器的主要程序塊,它將完成伺服控制器的初始化和位置控制,主要包括功能FC40和功能FC41;FC40主要完成軸的初始化;FC41是整個伺服控制系統(tǒng)的核心部分,能夠實現(xiàn)諸如速度命令、位置命令、力矩命令、原點復歸命令以及從總線上讀取伺服控制器的反饋值等控制;FC37是復位模塊,能清除總線的錯誤信息并產(chǎn)生一個復位命令使伺服控制器重新復位;DB40是功能塊FB40的背景數(shù)據(jù)塊。
2.6 FC30是FC40的子塊,完成從PLC到伺服控制器的命令傳遞,檢查命令是否被正確執(zhí)行并對錯誤進行處理;FC31是FC41的子塊,對FC41的完成情況進行診斷并傳遞給總線;FC33和FC34是功能塊FB40的附屬,前者對當前伺服控制器的狀態(tài)進行檢查,以便下一個指令的發(fā)送;后者處理多個伺服控制器的同步問題(在實際冷彎產(chǎn)品中存在多工位在線伺服控制模式)等。
2.7 STEP7提供了兩種常用的PID算法:連續(xù)型PID(FB41)和離散型PID(FB42),本系統(tǒng)選用FB41,它是根據(jù)系統(tǒng)的采樣周期而獲得的輸出控制,它決定了PID回路的靈敏度,即調節(jié)速度的快慢,初期PID參數(shù)整定不能單靠理論計算來確定PID參數(shù),實際PID的參數(shù)設定必須通過對被控參數(shù)的實時曲線和分布規(guī)律的實現(xiàn)程度,即其精度和運行穩(wěn)定程度來調整,以達到最佳控制效果。
3、 系統(tǒng)PID參數(shù)分析與整定
3.1 PID參數(shù):鑒于貨架冷彎型鋼冷彎生產(chǎn)線的具體生產(chǎn)過程的間斷性特點,有利于采用現(xiàn)場經(jīng)驗整定法獲取有效PID參數(shù)并能達到一個較好的控制效果,初期PID比例參數(shù)按經(jīng)驗數(shù)據(jù)設定,并依先比例,后積分,最后微分的順序進行PID參數(shù)調整,在觀察現(xiàn)場控制過程、過程值及運動控制精度的測量比較的同時,慢慢的改變PID參數(shù)值并反復湊試,直到運動控制精度及其穩(wěn)定性符合要求為止。PID最佳整定參數(shù)確定后,并不能說明它永遠都是最佳的,仍然會受外界擾動而發(fā)生根本性的改變并要求重新根據(jù)需要進行最佳參數(shù)的整定,實際過程中可以發(fā)現(xiàn)輸出與誤差的關系式如下所示:
上式中,U(n)為第n個采樣周期的控制輸出;e(n)為第n個采樣周期的位置誤差;n為正常采樣周期; 為微分采樣周期;kp為比例增益;ki為積分比例增益;kd為微分比例增益。PID控制系統(tǒng)調節(jié)輸出就是為了保證偏差值e為零,使系統(tǒng)達到一個預期穩(wěn)定狀態(tài)。
3.2控制系統(tǒng)參數(shù)的整定:主控PLC程序中的PID參數(shù)整定及系統(tǒng)運動分析,看給定的參數(shù)是否符合控制系統(tǒng)的要求,該過程需用參數(shù)整定實現(xiàn)。參數(shù)整定的主要任務是確定kp、ki、kd、采樣周期n及微分采樣周期 ;比例增益kp提供了一個與位置誤差成正比的輸出,比例系數(shù)kp增大,使伺服驅動系統(tǒng)的動作靈敏、響應加快,而過大會引起振蕩,調節(jié)時間加長;積分比例增益ki提供了隨時間增長的輸出,因此保證了靜態(tài)位置誤差為0,積分系數(shù)Ki增大,能消除系統(tǒng)穩(wěn)態(tài)誤差,但穩(wěn)定性下降;微分比例增益kd提供了與位置變化率成正比的輸出,起到了超前控制的作用,減小了系統(tǒng)的超調,保證了系統(tǒng)的動態(tài)特性良好,微分控制kd可以改善動態(tài)特性,使超調量減少,調整時間縮短。采樣周期的選取應遠小于對象的擾動周期、應比對象的時間常數(shù)小得多、應考慮執(zhí)行機構的響應速度、對象所要求的調節(jié)品質等,實際上盡量選取小量值;具體整定過程需要根據(jù)PID參數(shù)來制定現(xiàn)場的適應參數(shù)和現(xiàn)場的實際調整設定,由于系統(tǒng)主控PLC程序中的PID參數(shù)不能實現(xiàn)實時在線調整,需要根據(jù)不同的產(chǎn)品或負載情況分別整定,并在生產(chǎn)工具過程中通過觸摸屏分別輸入整定值來實現(xiàn)有效控制,否則易形成位置控制過程的超調或振蕩等現(xiàn)象。
4 調試要點及注意事項
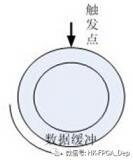
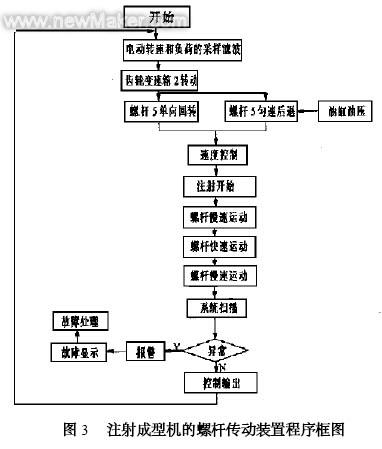
4.1交流位置伺服系統(tǒng)的動態(tài)性能是冷彎設備在線調試過程中的重要階段,直接決定了冷彎設備的工作性能和產(chǎn)品的孔位精度分布規(guī)律和控制精度。如貨架冷彎機組中的伺服系統(tǒng)的控制要求很高, 不應有任何振蕩和超調, 否則會造成貨架組件的側立面孔位誤差大,孔位分布不均勻,嚴重影響貨架的裝配精度和使用性能,降低成品率,增加生產(chǎn)經(jīng)營成本。貨架冷彎機組中的伺服定長送料為斷續(xù)送料模式,其送料的長度與配套設備的加工時間決定于交流位置伺服系統(tǒng)的運動節(jié)拍,控制定位精度及交流位置伺服系統(tǒng)的動態(tài)性能等,其動態(tài)性能一般可由系統(tǒng)在單位階躍輸入信號作用下的時間響應曲線來描述。如圖2所示可通過多種調整變化的形式逐漸到達定位點,我們希望獲得圖中標示為1的單調變化模式,不希望出現(xiàn)標示為2或3的振蕩波形,標示為4的調整模式會形成不到位故障或伺服系統(tǒng)隨動誤差大、調節(jié)時間延長等現(xiàn)象,影響整機的速度匹配和控制精度等。圖示出的常用的動態(tài)性能指標有: 上升時間tr、調節(jié)時間ts和超調量σ%。其中上升時間tr反映了系統(tǒng)的動態(tài)靈敏度和系統(tǒng)過渡過程的快速性; 調節(jié)時間ts又稱過渡過程時間,是衡量系統(tǒng)快速性的主要指標; 超調量σ%是反映在系統(tǒng)過度過程進行得是否平穩(wěn)的指標。
4.2在系統(tǒng)調試時, 完全可通過對系統(tǒng)動態(tài)性能的這些指標進行在線軟件測試、相關數(shù)據(jù)分析得到系統(tǒng)參數(shù)應調試的值, 如:SIMATIC STEP 7軟件針對SIMATIC S7-300 FM 354 SERVO模塊的DB1200中的參數(shù)和數(shù)據(jù)進行調節(jié),實現(xiàn)控制精度、運行速度等的優(yōu)化配置以及在線伺服系統(tǒng)的監(jiān)測,系統(tǒng)分析關鍵參數(shù)的走勢,如運動超調量的變化、速度及電流值的變化,從而調節(jié)使伺服系統(tǒng)達到理想狀態(tài)。如確認伺服系統(tǒng)運動執(zhí)行元件對上位機的指令執(zhí)行偏差情況,可采用指令偏差的自動或手動模式進行調整,適當優(yōu)化伺服控制器和伺服電機的設定參數(shù),對SIMATIC S7-300上位機及SIMATIC S7-300 FM 354 SERVO模塊伺服控制參數(shù)的設定和調整等,也可選用特定的調試軟件來輔助設定和調整控制參數(shù)。如:速度指令調整增益、速度環(huán)路增益等增益參數(shù)的調整,來獲得優(yōu)化參數(shù)和控制效果,由于伺服系統(tǒng)帶負載運行時存在系統(tǒng)與負載動態(tài)匹配的問題、存在參數(shù)時變、負載擾動以及伺服電機自身和被控對象的嚴重非線性、強耦合性等不確定因素,必須在線修訂模糊控制的數(shù)學模型和控制敏感參數(shù),相應的PID控制參數(shù),以實現(xiàn)系統(tǒng)無超調和振蕩現(xiàn)象。如:貨架冷彎機組在設計時會考慮使用多板厚同規(guī)格的系列產(chǎn)品、或通過不同的冷彎工藝在一條生產(chǎn)線上生產(chǎn)不同規(guī)格尺寸的貨架產(chǎn)品,故交流位置伺服系統(tǒng)的負載的大小和性質會發(fā)生多種變化,甚至相同規(guī)格卷料在更換后也會造成負載的不穩(wěn)定與變化, 這種變化將使系統(tǒng)的性能特別是動態(tài)性能變得復雜,使運動定位出現(xiàn)振蕩、超調甚至于不能穩(wěn)定運行,必須在調試現(xiàn)場測定系統(tǒng)所帶負載的動態(tài)性能指標和伺服系統(tǒng)在線帶負載時的動態(tài)性能指標, 在調試過程中對系統(tǒng)進行動態(tài)性能分析與測定, 并憑經(jīng)驗由人工進行現(xiàn)場在線修正與調試,調試現(xiàn)場也需要配合相當?shù)娜肆M行相關數(shù)據(jù)的收集整理、數(shù)據(jù)分析處理等。
4.3主要完成以下工作:1)、實時采集數(shù)據(jù), 即測試帶載系統(tǒng)的動態(tài)性能參數(shù), 如實際速度、實際位置參數(shù)等,主要是通過一些專用的參數(shù)單元、計算及監(jiān)控軟件,通過使用這些工具和手段進行有關參數(shù)的設定、監(jiān)控、波形顯示、I/O檢查監(jiān)控、在線調整、運動參數(shù)的獲取與處理等。2)、輔助作圖, 把這些參數(shù)用曲線形式表示出來, 如畫成速度響應曲線、位置響應曲線等;3)、求出系統(tǒng)的動態(tài)性能指標, 如: 上升時間tr、調節(jié)時間ts和超調量σ%等。4)、根據(jù)系統(tǒng)動態(tài)性能指標的走勢,重新制訂交流位置伺服系統(tǒng)的動態(tài)性能在線調試方案,5)、事實上可以實現(xiàn)伺服定位控制穩(wěn)定在編碼器一個角脈沖波動范圍上,并穩(wěn)定實現(xiàn)運動控制。如:我公司選用的編碼器為2000p/r,測量輥周長為300mm,貨架組件的孔位控制精度理論上可實現(xiàn)±0.075mm,考慮到冷彎卷料的表面平整度等其它因素的影響,其實際孔位控制精度要低些;根據(jù)從生產(chǎn)現(xiàn)場采集到的數(shù)據(jù)分析,實際孔位控制精度σ達到±0.10mm以內,且誤差基本符合正態(tài)分布規(guī)律,從根本上也保證了總長度上的累積誤差最小,基本穩(wěn)定在6σ以內。交流伺服系統(tǒng)最高運行速度可達60M/min以上,整機匹配運行速度可達到20M/min以上等,極大地提高了冷彎型鋼產(chǎn)品的生產(chǎn)制造品質、生產(chǎn)效率和應用范圍。
4.4系統(tǒng)的機械控制精度對電氣系統(tǒng)的控制精度存在一定的影響,可通過電氣上的通電保持和實際的轉矩平衡、適當?shù)臋C械定位抱閘及加工原料的平整度等方面進行綜合控制以縮短系統(tǒng)的在線調試時間和周期,為保證冷彎組件的質量和生產(chǎn)成本,還必須定期對旋轉編碼器測量輥的磨損進行校準修正、相關外圍設備參數(shù)變化或調試過程中的機組再調整、設備的維護保養(yǎng)等,從而盡量在很多場合達到較高精度位置控制的要求。并根據(jù)具體產(chǎn)品進行參數(shù)優(yōu)化和性能分析,以提高系統(tǒng)的廣泛適應性。
5、結論
運用SIMATIC S7-300 可編程控制器在在線預沖孔冷彎成型生產(chǎn)線中的具體應用及編程設計、調試。基本可實現(xiàn)貨架立柱的孔位誤差控制精度要求,該系統(tǒng)經(jīng)過實際在線調試和運行表明,整個系統(tǒng)設計合理,控制精度高,運行可靠,減小了操作人員的勞動強度,提高了生產(chǎn)效率。將在線預沖孔冷彎成型生產(chǎn)線的生產(chǎn)效率和產(chǎn)品質量提升到了一個新的層次,應該說其整體規(guī)劃設計思路和具體應用調試過程是成功的。


















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論