 電子發燒友App
電子發燒友App


自從美國9·11恐怖事件之后,國際反恐的呼聲一浪高過一浪,而恐怖分子的活動還在繼續,各國針對反恐的高科技研究還在深入。近日,一種專門應用于反恐領域的“爬壁機器人”在哈爾濱工業大學誕生。由哈工大承擔的“面向反恐偵查的微聲爬壁機器人的研究”課題日前在北京通過驗收。從而誕生了一種專門應用于反恐偵查領域的“爬壁機器人”。
許多人都不清楚,也都想知道,這個爬壁機器人長得什么樣?到底怎么爬壁?它爬壁的過程是什么樣的?它有多快的速度?它受不受天氣的干擾?它對墻壁有什么要求?它還在哪些方面需要改進?它除了在反恐方面有用外還可以用來做什么?
圖:由日本Hokaido tech college 研發的爬墻機器人(僅供參考)
帶著這些疑問,記者采訪了課題負責人李滿天博士,也有幸目睹了這個新玩意一展爬墻風采時拍下的視頻。但,遺憾的是,實物去了北京,沒能一飽眼福。
爬壁機器人
走進哈爾濱工業大學的機器人實驗室,研究人員打開了電腦,屏幕上播出了一組畫面。一個幾乎每棟樓上都可以看到的普普通通的空調外掛機出現在畫面中,研究人員指著“空調外掛機”告訴記者,這個就是我們研制的反恐爬壁機器人。
新鮮、好奇,有些不可思議。
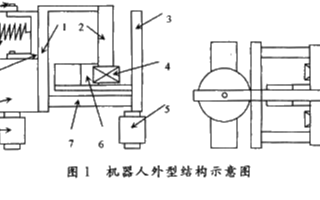
許多人了解到的機器人大多都是具有人的形狀,而這個機器人為什么要做成這樣一個“很不像”普通人眼里的機器人樣呢?細看,在它的一邊,有一只伸出的“手臂”,手里還拿著一個“對講機”。李博士介紹,這個機器人是仿空調外掛機制作的,為了在反恐偵查過程中,便于偽裝,它的手臂可以攜帶攝像頭、武器模塊、遙控裝置等,它的大小和空調外掛機相當,是320MM×280MM×150MM的長方體。這種爬壁機器人采用負壓吸附、單吸盤、四輪移動結構方式,具有移動快、吸附可靠、適應多種墻壁表面、噪聲低(70分貝)、結構緊湊、控制方便靈活等特點。
七大疑問——
怎么在陡峭的壁上吸附?
一個類似空調外掛機的東西怎么爬壁呢?它利用了什么原理呢?李博士介紹說,爬壁機器人利用負壓發生器和負壓槍來實現這一過程。負壓發生器設有多個單吸盤,通過排氣來實現吸盤的吸附,在排出的氣量大于進氣量時,就會形成負壓,外面的大氣壓就會很自然地把機器人擠壓到墻壁上。然而,這還不能使其完全吸附,同時還要配上耐磨,彈性好的材料作為密封性的保證,才能使它在墻壁上完全吸附。
怎么爬行?怎么轉彎?
怎么爬行是爬壁機器人必須做到的一項份內之事,在它的底部有兩組輪,用來移動和轉彎。在需要轉彎時,它靠調整兩組輪的轉動速度來改變方向。例如,它在向上爬的過程中,需要向左轉來改變自己前進的方向,就讓右邊的一組輪子轉動快點,左面的一組輪子相對速度放慢,這樣就很容易改變方向了。
對墻壁面有什么要求?
我國樓宇的墻壁面,有70%采用了瓷磚貼、石灰粉刷、水泥粉刷、紅磚墻面四種形式。前三種墻面對爬壁機器人來說,只是小菜一碟,平整光滑的表面利于吸附和爬行。唯獨紅磚墻面,它需要認真對待,表面粗糙、凹凸不平、磚與磚之間空隙大等特點都對它是一個挑戰,嚴重影響它的吸附能力。
天氣情況對它爬壁有什么影響?
不知道大家注意沒注意,當天氣變冷,我們的手機在受冷的情況下會變得反應遲鈍。人們或許會擔心,爬壁機器人是不是也有同樣的弊病?“不會,機器人是在哈爾濱研制,在零下27攝氏度的情況下我們做過試驗,一點也不影響它的吸附能力和爬壁速度。”李博士自信地說。然而,他也指出,在雨天若墻壁上有微小水流,會對爬壁機器人有影響,打濕它的吸聲棉,增大了負載,并影響了噪音,在反恐斗爭中容易暴露目標。
它的速度有多快?負載量有多大?怎么偵查?
在反恐斗爭中,時間就是生命,因此,無論是從偵查情況還是做出決定都要在很短的時間里完成。據李滿天博士介紹,爬壁機器人每分鐘可以爬到10米以上的地方,相當于三層樓的高度。如果犯罪分子在一棟樓的20層某個房間作案,那么它就能在6分鐘左右到達最佳的偵察位置。同時,它在爬樓的過程中負載量在2.5公斤到3公斤,完全可以攜帶武器模塊,在危機時進行攻擊。以反樓宇內人質劫持為例,犯罪分子隱藏在房間里,外面的反恐人員很難了解到房間內部的情況。這時,反恐人員可以為反恐爬壁機器人配備偵查設備,利用遙控裝置控制其悄無聲息地沿壁面爬到便于偵查的位置。爬壁機器人把用攝像機拍攝到的房間內部的圖像,通過無線傳輸裝置實時傳到幾百米外的終端,為反恐人員判斷形勢、做出決斷提供現場依據。
除在反恐偵查領域有用外還可以用在什么地方?
據李博士介紹,除去這一領域,它的用途相當廣泛,在多個行業都有涉獵。例如在核工業領域,對核廢液儲罐進行視覺檢查、測厚及焊縫探傷等。在石化企業對圓柱形大罐或球形罐的內外壁面進行檢查或噴砂除銹、噴漆防腐。在建筑行業噴涂巨型墻面、安裝瓷磚、壁面清洗、擦玻璃等。還可用于消防部門傳遞救援物資,進行救援工作。
還需要在哪些方面改進?
在談到這一問題時,李博士表示,目前,它缺少翻越障礙的本領。它只僅僅局限在平整的墻面上爬行,如果墻壁之間有大的斷裂,它只能敗北,停止前進。為此,他們打算給它再做進一步改進,讓它多出幾個關節,可以更好地適應各種墻壁,同時具有翻越障礙的能力 。
以下視頻并不是本文討論的爬壁機器人,但是也是利用負壓吸盤,所以也非常具有代表性。












 工商網監
工商網監
評論