 電子發(fā)燒友App
電子發(fā)燒友App


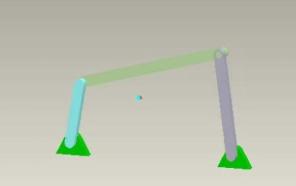
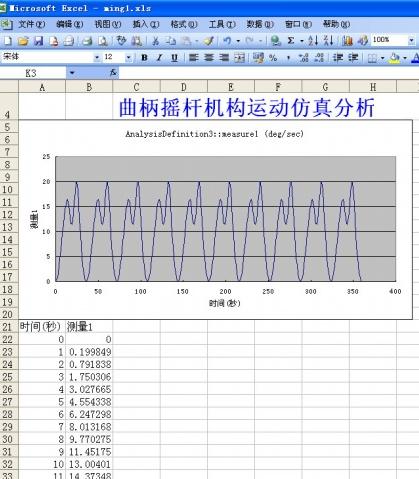
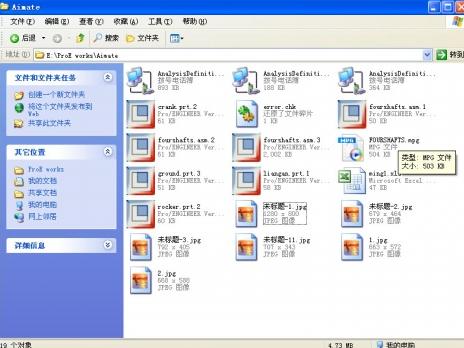
Pro/E四桿機構(gòu)的運動仿真與分析
- 運動仿真(11166)


相關(guān)推薦
使用四桿機構(gòu)對仿生蜻蜓撲翼飛行器進行設(shè)計優(yōu)化與仿真的資料說明
的機構(gòu)設(shè)計方法對仿生微撲翼機構(gòu)進行優(yōu)化設(shè)計,確定出各桿件參數(shù)和運動參數(shù)。然后利用CATIA來對撲翼機構(gòu)進行運動仿真分析,模擬機構(gòu)的運動過程,仿真結(jié)果與設(shè)計要求基本吻合,驗證了機構(gòu)的可行性。
2019-09-23 08:00:00 4
4
4客車行李艙門四連桿機構(gòu)的探討
運用理論分析和計算機輔助設(shè)計手段, 研究了氣彈簧驅(qū)動的客車行李艙門四連桿移動機構(gòu)的行為及四連桿機構(gòu)參數(shù)對客車行李艙門運動規(guī)律的影響。關(guān)鍵詞: 客車; 行李艙門; 四
2009-07-25 15:39:1429
29基于UG的運動仿真及高級仿真
熟悉UG機構(gòu)運動仿真模塊的內(nèi)容,掌握運動仿真的一般流程和方法,并根據(jù)分析輸出結(jié)果對機構(gòu)進行優(yōu)化。
2021-05-13 10:55:1010
10機構(gòu)傳動系統(tǒng)設(shè)計、拼裝及運動分析實驗
實驗四、機構(gòu)傳動系統(tǒng)設(shè)計、拼裝及運動分析實驗一、實驗?zāi)康?.認識典型機構(gòu)2.設(shè)計實現(xiàn)滿足不同運動要求的傳動機構(gòu)系統(tǒng)3.拼裝機構(gòu)系統(tǒng)4.對運動構(gòu)
2009-03-13 11:49:54 5026
5026
5026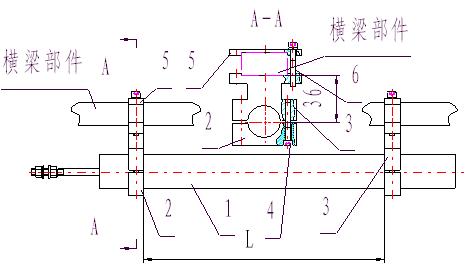
液動連桿機構(gòu)運動特性仿真設(shè)計
利用AMESim軟件構(gòu)建了液壓系統(tǒng)一連桿機構(gòu)聯(lián)合仿真模型,進行機構(gòu)動作的動畫展示,同時比較了拍擊錘質(zhì)量、鉸接點位置和供液壓力等對液動連桿機構(gòu)運動特性的影響。仿真結(jié)果表明拍擊錘沖擊可以等效7倍以上重力加速度,補液、回程
2018-03-05 15:56:181
1三叉桿-球籠式萬向聯(lián)軸器傳動軸的運動仿真
針對三叉桿一球籠式萬向聯(lián)軸器傳動軸結(jié)構(gòu)復(fù)雜,難以采用傳統(tǒng)的圖解法、解析法獲得其運動規(guī)律的問題,采用Pro/E軟件,在充分考慮各構(gòu)件之間的相互約束關(guān)系的基礎(chǔ)上,對三叉桿一球籠式萬向聯(lián)軸器傳動軸整體
2018-03-12 11:39:310
0機構(gòu)運動簡圖測繪與分析實驗
實驗一 、機構(gòu)運動簡圖測繪與分析實驗一 、實驗?zāi)康?nbsp; 掌握根據(jù)實際的機器和模型繪制機構(gòu)運動簡圖的方法,學(xué)會用機構(gòu)運動簡圖
2009-03-13 11:45:1718339
18339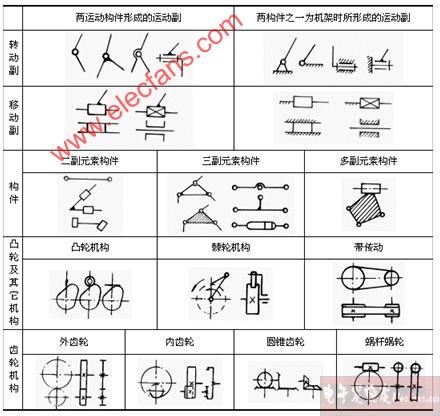
基于平面閉鏈機構(gòu)的縮桿鄰接矩陣變更
針對平面閉鏈機構(gòu)運動特性集成的問題,對閉鏈機構(gòu)的設(shè)計過程、閉鏈機構(gòu)運動鏈數(shù)目綜合過程、縮桿鄰接矩陣表示、去同構(gòu)鏈、去呆鏈等方面進行了研究,以此獲得了各桿件不同自由度的縮桿鄰接矩陣數(shù)目表。通過對各縮桿
2018-03-20 11:31:190
0機構(gòu)運動方案創(chuàng)新設(shè)計
一、概述機構(gòu)運動方案創(chuàng)新設(shè)計是一個具有創(chuàng)新性的活動過程,旨在培養(yǎng)學(xué)生的創(chuàng)新意識和創(chuàng)新設(shè)計的能力。本實驗是基于桿組的迭加原理而設(shè)計的,主要應(yīng)用于機構(gòu)組成原理
2009-05-14 23:25:0338
38并聯(lián)機構(gòu)的運動控制應(yīng)用
本文主要論述了并聯(lián)機構(gòu)奇異點的分析方法,進行了冗余驅(qū)動機構(gòu)運動學(xué)及動力學(xué)分析,提出了控制策略,實現(xiàn)了并聯(lián)機構(gòu)的運動控制
2011-07-06 17:51:1322
22并聯(lián)2_UPS_RRR踝關(guān)節(jié)康復(fù)機構(gòu)及運動性能分析
的踝關(guān)節(jié)旋轉(zhuǎn)中心重合.計算了自由度,并應(yīng)用解析法給出了機構(gòu)的運動學(xué)逆解,建立了速度雅可比矩陣,通過對驅(qū)動參數(shù)的限定,求解了滿足訓(xùn)練要求的機構(gòu)工作空間.最后基于雅可比矩陣,仿真分析了機構(gòu)的運動學(xué)性能,
結(jié)果表明在規(guī)定的工作空間
2017-01-14 15:34:130
0機構(gòu)動態(tài)仿真
機構(gòu)動態(tài)仿真:該書提出了利用MATLAB及Simulink工具箱在計算機上解決機構(gòu)動態(tài)建模及仿真問題的分析思路、方法……
2009-09-08 11:15:0145
45Proe仿真教程_張繼春
機構(gòu)運動分析模塊(Mechanism)是Pro/ENGINEER Wildfire中一個集運動仿真和機構(gòu)分析于一身的功能強大的模塊。利用該模塊,當各個零部件通過裝配模塊組裝成一個完整的機構(gòu)以后,設(shè)計師就可
2011-09-14 15:00:37320
320冗余機構(gòu)2URR 2RRU運動學(xué)與性能分析
針對實際運動控制對機構(gòu)運動學(xué)分析及性能分析的依賴性問題,將并聯(lián)機構(gòu)運動分析方法應(yīng)用到了新型并聯(lián)機構(gòu)2URR-2RRU中。首先運用了螺旋理論對機構(gòu)白由度進行分析,采用矢量法對機構(gòu)進行了位置分析,通過
2018-03-08 10:15:070
0機械系統(tǒng)的運動方案設(shè)計及機構(gòu)創(chuàng)新設(shè)計
機械系統(tǒng)運動方案設(shè)計, 擬定機械的工作原理,執(zhí)行機構(gòu)設(shè)計,原動機的選擇,傳動系統(tǒng)的設(shè)計,方案評價與選擇,機構(gòu)運動尺寸設(shè)計,機構(gòu)性能分析,機構(gòu)運動簡圖繪制一、擬定機械
2009-05-14 23:28:0656
56仿生四足機器人設(shè)計及運動學(xué)足端受力分析
態(tài)運動中四肢各關(guān)節(jié)的運動規(guī)律,設(shè)計一款四足機器人。該機器人足端具有轉(zhuǎn)化足端與地面剛性接觸為柔性接觸的機構(gòu)。根據(jù)正運動學(xué)和逆運動學(xué)理論分析模型足端工作空間。將仿真獲得的受力曲線與實際受力曲線進行對比,結(jié)果表
2018-02-08 16:07:112
2
Solid Edge運動仿真教程
Solid Edge運動仿真教程
運動仿真(Motion)是Solid Edge裝配環(huán)境內(nèi)一個獨立的功能,單擊裝配主菜單“環(huán)境”中的“運動仿真”命令,便可進入“運動仿真”環(huán)境。
2010-04-29 14:21:2394
94常用機構(gòu)介紹
機構(gòu)的結(jié)構(gòu)分析從分析機構(gòu)的組成入手,研究機構(gòu)的組成情況對其運動的影響,以及機構(gòu)運動簡圖的繪制方法,為研究現(xiàn)有機構(gòu)和創(chuàng)造新機構(gòu)打下基礎(chǔ)。常用機構(gòu)及其設(shè)計從分析幾
2009-04-07 09:20:2036
36并聯(lián)式機構(gòu)的優(yōu)缺點與并聯(lián)機構(gòu)原理在機器人領(lǐng)域的應(yīng)用
編碼器與傳感器用來提高機構(gòu)運動時的精準度,串聯(lián)式機構(gòu)優(yōu)點包括: 1.工作空間大、2.運動分析較容易、3.可避免驅(qū)動軸之間的耦合(coupling) 效應(yīng)。相反的,并聯(lián)式機構(gòu)運動桿件為一個封閉形式的結(jié)構(gòu)鏈,其優(yōu)缺點如下: 1.不易有動
2017-10-17 15:27:3939
39如何利用PROE和ADAMS建立了外槽輪式排種器的電控運動仿真模型
本文利用PRO/E和ADAMS建立了外槽輪式排種器的電控運動仿真模型,并設(shè)定相關(guān)約束與運動函數(shù),對虛擬樣機進行了動態(tài)仿真。對電控外槽輪式排種器的運動進行了設(shè)計,其中包括篩板對種子篩選的旋轉(zhuǎn)運動,外槽輪式排種器槽輪與阻塞輪軸向變速移動與其同排種軸的變速轉(zhuǎn)動。
2018-04-28 14:32:2332
32基于機構(gòu)運動平穩(wěn)的可靠性研究
在產(chǎn)品設(shè)計中,往復(fù)機構(gòu)的運動平穩(wěn)性和可靠性直接影響機構(gòu)的運動、動力性能和產(chǎn)品質(zhì)量。文中從動力學(xué)和運動學(xué)的角度,對應(yīng)用廣泛的曲柄滑塊機構(gòu)開展基于運動平穩(wěn)性的可靠性研
2011-09-21 16:58:2227
27機構(gòu)組合創(chuàng)新實驗
實驗三、 機構(gòu)組合創(chuàng)新實驗一 、實驗?zāi)康?.進一步掌握機構(gòu)組成理論,熟悉桿組概念和機械傳動的基礎(chǔ)知識。2.拼裝可實現(xiàn)不同運動要求的機構(gòu),傳動系統(tǒng)
2009-03-13 11:47:144273
4273Pro/E 野火版視頻教程
Pro/E 野火版視頻教程
作者:周四新本書僅供學(xué)習(xí)使用,嚴禁商用!這是一部未公開發(fā)行的,Pro/e自學(xué)的最佳教材!說明:完整版的電子書和與之完全配
2009-09-12 14:40:14257
257什么是機構(gòu)?
什么是機構(gòu)呢?
機構(gòu)可以定義為:是一個具有確定的機械運動的構(gòu)件系統(tǒng),或稱它是用來傳遞運動和動力的可動裝置。1、機構(gòu)的分析
2009-04-11 10:03:057003
7003設(shè)計全向滾動球形機器人的內(nèi)驅(qū)動機構(gòu)和運動分析與軌跡規(guī)劃
特性,建立了球形機器人的運動模型,給出了控制其運動的二階微分方程組,進而提出了該球形機器人的軌跡規(guī)劃算法。 結(jié)合實例進行了運動分析和軌跡規(guī)劃仿真,表明這種運動分析模型是正確的,并且簡化了球形機器人的驅(qū)動裝置,降低了
2019-06-21 17:14:206
6抽油機井桿管偏磨可視化仿真系統(tǒng)
針對油田現(xiàn)場桿管偏磨嚴重且缺少偏磨可視化仿真系統(tǒng)的現(xiàn)狀,設(shè)計了一套抽油機井桿管偏磨可視化仿真系統(tǒng),實現(xiàn)了井眼軌跡、油管的靜態(tài)可視化仿真以及抽油桿運動狀態(tài)、桿管接觸狀態(tài)的動態(tài)可視化仿真。采用反求三次B
2017-11-27 10:32:170
0利用vcs+verdi仿真工具蜂鳥E200系列處理器仿真分析
開源RISC-V Hummingbird E203(蜂鳥E203)的仿真工具是開源的iverilog,這里利用vcs+verdi仿真工具進行仿真;
2022-11-17 10:28:361531
1531絲桿步進電機的具體結(jié)構(gòu)類型分類
絲桿步進電機與旋轉(zhuǎn)步進電機相比,旋轉(zhuǎn)步進電機主要是依賴于一些運動機構(gòu)將旋轉(zhuǎn)運動轉(zhuǎn)換為直線運動。因此絲桿步進電機的本身的機械結(jié)構(gòu)要更加簡單,設(shè)備的整體體積也更加小巧。
2022-05-30 10:56:322931
2931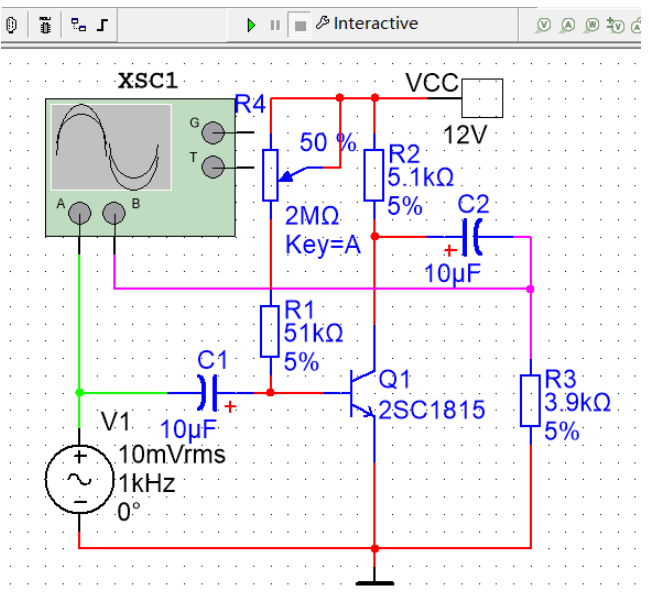
機構(gòu)動力學(xué)計算機輔助分析方法的比較
本文利用CAXA繪圖軟件和ADAMS機械系統(tǒng)仿真分析軟件對一六桿機構(gòu)進行動力學(xué)分析。與傳統(tǒng)的圖解法及解析法相比,兩種計算機輔助法均具有較高的計算速度和精度。通過比較兩種軟
2009-12-12 12:43:077
7Pro/E野火版3.0基礎(chǔ)教程電子教案(周四新proe3基礎(chǔ)
proe野火3.0電子教案:proe野火3.0電子教案(周四新proe3基礎(chǔ)教案),周四新proe3基礎(chǔ)教學(xué)演示范例等內(nèi)容。《Pro/ENGINEER Wildfire基礎(chǔ)設(shè)計》周四新 和青芳編著該書被PTC公司中國區(qū)推薦為Pro/E
2009-09-12 16:29:29288
288VR動感椅平臺運動分析和仿真
VR動感椅運動平臺原型為三自由度并聯(lián)運動機構(gòu),由六自由度Stewart機構(gòu)衍生而來。本研究設(shè)計的一種新型的具有防扭結(jié)構(gòu)的三自由度并聯(lián)運動平臺,應(yīng)用于虛擬現(xiàn)實技術(shù)中的動感椅結(jié)構(gòu)中。基于VR技術(shù)的動感椅
2018-03-13 11:07:090
0運動耳機新推薦!OpenRun Pro讓運動更全面
的OpenRun Pro受歡迎度很高,各大平臺都有著不錯的產(chǎn)品銷量,那么OpenRun Pro這款耳機究竟有哪些亮點呢? 開放雙耳設(shè)計,佩戴舒適升級 首先從產(chǎn)品定位來看,OpenRun Pro后背靠的是圈內(nèi)著名運動耳機品牌——韶音。該品牌一直致力于專業(yè)運動耳機產(chǎn)
2022-12-13 18:14:06248
248
550 kV斷路器用密封桿疲勞分析及試驗研究
為解決如何對斷路器密封桿疲勞壽命進行分析的問題,以550 kV斷路器密封桿為研究對象,分別通過應(yīng)力實驗與分合閘實驗測得了該密封桿某截面的應(yīng)變時間曲線及行程時間曲線。首先建立了三維仿真模型,利用這些
2018-03-21 10:55:260
0運動控制卡能仿真嗎?
其實不同品牌運動控制卡對仿真的支持是不一樣的,有些品牌不支持,有的品牌則支持,今天跟大家分享一下,基于正運動Zmotion運動控制卡,來實現(xiàn)仿真調(diào)試。
2023-02-22 15:54:35612
612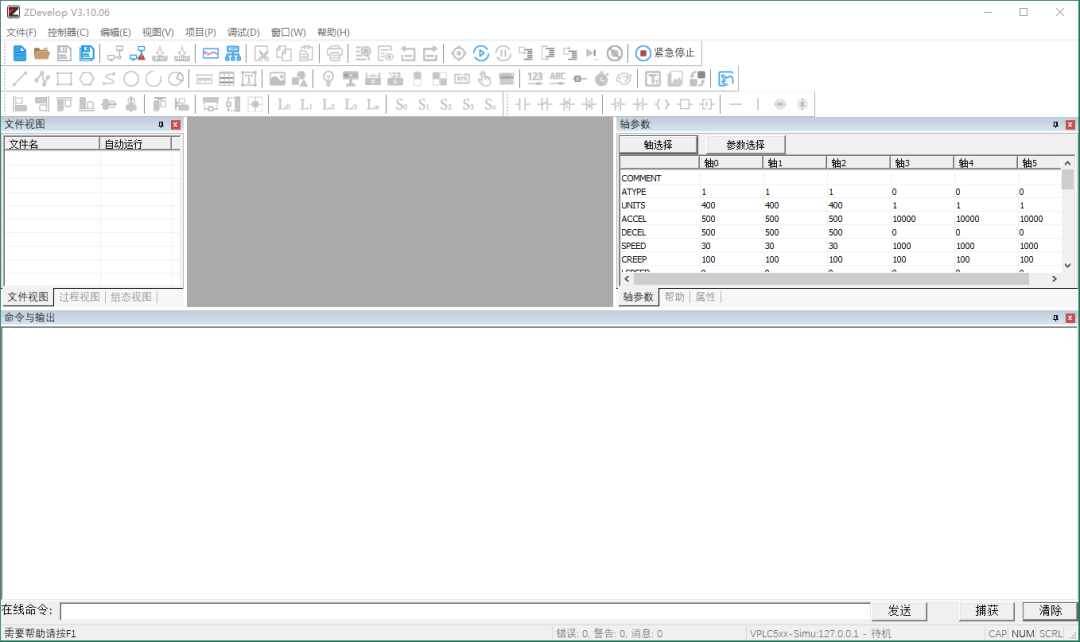
實時布料運動仿真技術(shù)
針對同時要求布料運動實時性、真實性和穩(wěn)定性的應(yīng)用,該文從簡化布料運動仿真模型和改進積分方法著手,提供了實時布料運動仿真方法。使用該方法實現(xiàn)的布料仿真系統(tǒng)速度
2009-05-11 20:14:4233
33使用滾珠絲桿應(yīng)該注意哪些事項?
滾珠絲桿,它應(yīng)該是在工業(yè)設(shè)備中很常見的一種傳動機構(gòu)了,它可以由旋轉(zhuǎn)運動轉(zhuǎn)換成直線運動,很多的設(shè)備當中都需要用到它。滾珠絲桿的特點 1.精度高滾珠絲桿對制造環(huán)境有很大的要求,比如對溫度,濕度
2021-10-06 10:44:51
Pro/E野火3.0基礎(chǔ)設(shè)計高級設(shè)計教程光盤
Pro/E野火3.0基礎(chǔ)設(shè)計高級設(shè)計教程光盤:最新中文野火版3.0基礎(chǔ)設(shè)計(周四新 和青芳編著)配書光盤(模型練習(xí)文件和基本操作視頻演示文件)最新中文野火版3.0高級設(shè)計(周四
2009-09-15 10:41:04150
150擺動握臂式防疊機構(gòu)模態(tài)分析
針對擺動握臂式防疊機構(gòu)的振動性能對其結(jié)構(gòu)穩(wěn)定性及防疊對象筒紗質(zhì)量的直接影響,對擺動握臂式防疊機構(gòu)的振動特性進行了研究。首先利用Pro/E與ANSYS Workbench軟件協(xié)同建立起了擺動握臂式防疊
2018-03-14 14:58:220
0【新品發(fā)布】車載總線監(jiān)控分析及仿真工具-VBA
INTEWORK-VBA(Vehicle Bus Analyzer) 車輛總線監(jiān)控分析及仿真工具,是由經(jīng)緯恒潤自主研發(fā)的一款專業(yè)、易用的車載
2021-03-05 10:42:54
ProE機構(gòu)仿真基礎(chǔ)教程實例講解實踐
本文檔的主要內(nèi)容詳細介紹的是ProE機構(gòu)仿真基礎(chǔ)教程實例講解實踐免費下載。
2021-03-21 11:04:3210
10Motor-CAD的永磁同步電機變速工況E-NVH仿真分析
目前,新能源汽車電機的噪聲問題變得越來越突出,電機的電磁振動噪聲是設(shè)計人員研究的熱點問題,而電磁振動噪聲的激勵源電磁力波至關(guān)重要。本文基于Motor-CAD對永磁同步電機進行電磁振動噪聲(E-NVH)仿真分析,為永磁同步電機的E-NVH分析提供理論依據(jù),并為永磁同步電機的E-NVH提供優(yōu)化途徑。
2023-02-06 17:05:454019
4019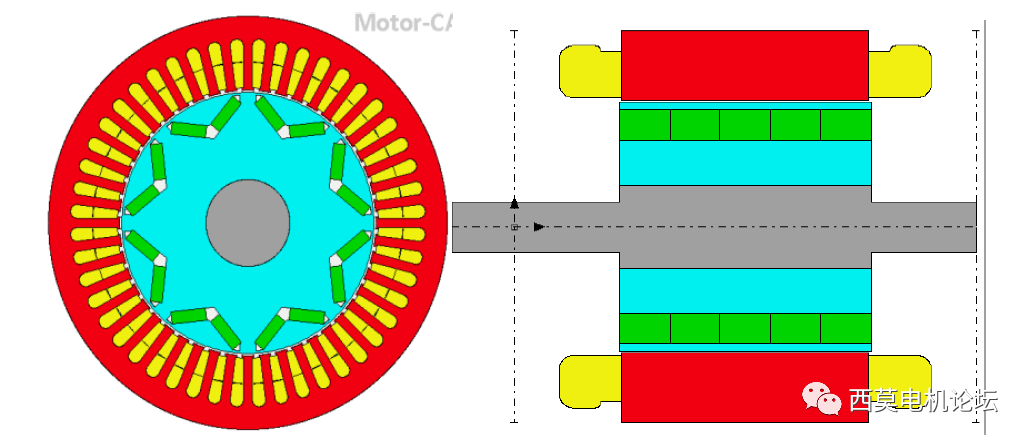
一種新型并聯(lián)機構(gòu)的運動學(xué)分析
閉環(huán),且由三組對稱的支鏈構(gòu)成這種折頁式三自由度并聯(lián)機構(gòu)。為了獲得該并聯(lián)機構(gòu)的運動學(xué)參數(shù)變化和奇異性,運用支鏈坐標系的方法,對該機構(gòu)的每一個構(gòu)件都做了詳細的運動學(xué)分析,并且獲得了該系統(tǒng)的雅克比矩陣和各構(gòu)件的
2018-03-27 10:11:071
1城市多桿合一智慧路燈綜合桿改造的意義
燈桿與交通設(shè)施桿整合,路名牌與路燈桿、交通設(shè)施桿整合,導(dǎo)向牌與路燈桿、交通設(shè)施桿整合等四類整合。
2021-12-28 09:41:492224
2224連桿機構(gòu)分析與設(shè)計
連桿機構(gòu)分析與設(shè)計一、定義與分類(1)由若干剛性構(gòu)件用低副聯(lián)接而成的機構(gòu)稱為連桿機構(gòu)連桿機構(gòu)又稱為低副機構(gòu)(2)連桿機構(gòu)可分為空間連桿機構(gòu)和平面連桿
2009-04-11 10:27:2568
68基于Motor-CAD的永磁同步電機變速工況E-NVH仿真分析
-NVH)仿真分析,為永磁同步電機的E-NVH分析提供理論依據(jù),并為永磁同步電機的E-NVH提供優(yōu)化途徑。 Motor-CAD是全球領(lǐng)先的新能源汽車電機選型分析及設(shè)計軟件,用于新能源汽車電機的選型匹配,優(yōu)化
2023-02-06 10:53:171025
1025凸輪–連桿組合機構(gòu)的解析法設(shè)計
根據(jù)輸出軌跡點的運動與凸輪旋轉(zhuǎn)同步的思路,給出并解決了按給定的軌跡曲線來設(shè)計凸輪一連桿組合機構(gòu)的凸輪輪廓線的解析設(shè)計方法。通過實例對設(shè)計方法進行了驗證。 凸輪連桿組合機構(gòu)是由連桿機構(gòu)和凸輪機構(gòu)按一定
2018-04-20 16:09:313
3E1/E20仿真器、E2仿真器用戶手冊附加文檔(RH850/E1L和RH850/E1M-S連接注意事項)
E1/E20仿真器、E2仿真器用戶手冊附加文檔(RH850/E1L和RH850/E1M-S連接注意事項)
2023-07-04 20:09:096
6E1/E20仿真器、E2仿真器用戶手冊附加文檔(RH850/E1L和RH850/E1M-S連接注意事項)
E1/E20仿真器、E2仿真器用戶手冊附加文檔(RH850/E1L和RH850/E1M-S連接注意事項)
2023-03-13 18:51:348
8




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論