周期; 為了最大限度延長電池壽命并擴大存儲容量,此過程中必須實現高精度控制。在每個周期中,電池的電流和電壓必須得到精確控制,許多制造商要求滿量程控制精度超過0.05%。然而,隨著對電池電流要求的增加,保持如此高的精確度變得越
2018-09-27 10:07:10 10994
10994 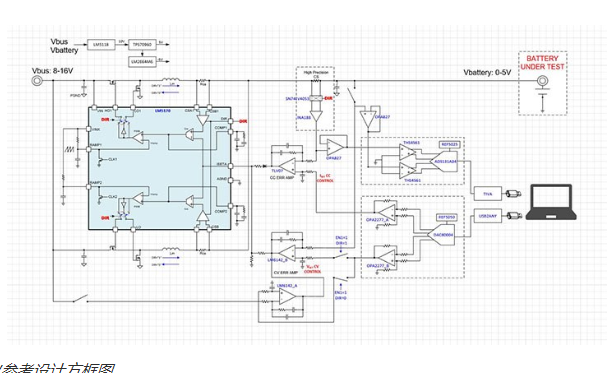
步進電機常用來做定位控制,它可以由PLC輸出的脈沖數量控制旋轉的角度(相對來說可以是距離),脈沖的頻率控制步進電機旋轉的速度。但用于控制精度不是很高的場合,簡單、經濟、控制方便;對于控制精度要求很高的場合,就得使用伺服控制系統了。
2022-09-22 10:14:411228 如何理解foc控制FOC控制是一種高級電機控制技術,可以提高電機的功率、效率和控制精度。FOC控制的核心思想是使用磁場定向控制電機,將電機的輸出控制轉換為磁通量和電流的控制,從而使電機保持高效穩定
2023-07-31 17:28:131045 
?
還有轉速動態控制精度是多少?見圖二,按道理來說,電機的實際輸出轉速和給定轉速應該一致,我給定的是1000RPM,但是實際輸出確是1001.2RPM。實際輸出會有一定的波動,請問有什么參數可以參照量化這個轉速波動?與S120伺服系統搭配使用。
2023-11-08 06:25:07
電機減速比:減速比=輸入轉速÷輸出轉速,,連接的輸入轉速和輸出轉速的比值,如輸入轉速為1500r/min,輸出轉速為25r/min,那么其減速比則為:i=60:1細分模式:幾細分就相當于“控制精度
2021-09-03 07:25:23
步進電機 vs 伺服電機:1、控制精度:步進電機的控制精度是由步距角決定的,且每個電機的步距角是確定的;伺服電機步距角由編碼器決定,所以控制精度非常高。【注】步距角:輸入一個脈沖能轉動的角度。二相
2021-06-28 07:57:52
1. 電機在加速時怎么減小電機轉矩的波動?2. 電機在速度控制時怎么保證轉矩恒定?
2018-08-28 11:23:09
詳解無刷電機和有刷電機的區別在哪里?
2021-06-26 06:27:27
是DSP輸出的占空比還是L298N本身的控制精度呢?因為電機轉動精度是8度每秒,用L298N控制可以實現么?希望熟悉的大神解答,不勝感激~
2014-03-03 00:06:20
E/F變頻和矢量變頻的區別,還有控制精度的話哪個好呀
2023-12-20 07:15:21
最初對PCB確立±10%的控制精度要求是由電路中800Mz頻率信號的Direc Rambus型的 DRAM模塊(RIMM)應用所提出的,這是為了保證計算機主機和交換機的內部電路實現更高速的動作。不僅
2023-09-21 06:14:35
針對無刷直流電機的PI控制系統控制精度和動態特性提出的自適應模糊PI控制方法的算法研究 ,可以看下推薦課程:張飛軟硬開源,基于STM32 BLDC直流無刷電機驅動器視頻套件http://t.elecfans.com/topic/42.html?elecfans_trackid=bbs_post
2016-01-06 13:50:23
),電機的轉據和轉子電流,主磁通有關。根據這個原理,我們在對三項異步電機進行控制時,可以采用同時控制轉速(變頻),轉炬(變壓)的方式,即變頻變壓(VVVf)。這種方式的優點,控制精度高,可靠性好,結構簡單,缺點電磁干擾嚴重,電機發熱厲害,對于負載變化大的情況跟蹤不好
2016-01-13 15:29:54
的電流進行控制;電機的反映要快、體積要小、控制功率要小。伺服電機主要應用在各種運動控制系統中,尤其是隨動系統。 伺服電機有直流和交流之分,最早的伺服電機是一般的直流電機,在控制精度不高的情況下,才采用
2019-06-12 00:25:30
,可檢測出機械的共振點,便于系統調整。(2)控制精度高。交流伺服電機的控制精度由電機軸后端的旋轉編碼器保證。例如松下全數字式交流伺服電機,對于帶17位編碼器的電機而言,驅動器每接收 伺服電機控制淺析個
2018-10-12 09:54:20
1.控制精度不同兩相步進電機步距角為1.8度:200個脈沖/轉。交流伺服電機的控制精度由電動機后端的編碼器保證。對于帶17位編碼器的電動機而言,驅動器每接收217 = 131072個脈沖電動機轉一圈
2021-06-28 09:56:07
; 為了最大限度延長電池壽命并擴大存儲容量,此過程中必須實現高精度控制。在每個周期中,電池的電流和電壓必須得到精確控制,許多制造商要求滿量程控制精度超過0.05%。然而,隨著對電池電流要求的增加,保持
2021-07-25 08:00:00
我查閱了部分變頻器廠商的說明書,在閉環編碼器反饋矢量控制時速度控制精度在0.02%,我想著能夠做出這么高的精度嗎?0.02%這么高的精度,以50HZ兩級對電機為例,同步轉速1500,如果是在閉環控制
2024-02-28 12:16:54
求助畢業設計基于LabVIEW下的步進電機自動升降控制系統設計1.利用LabVIEW構建信號發生和檢測裝置;2.合理的選擇測量元件; 3.控制系統的設計及調試;4.調速方案的測試與性能比較 最終設計出步進電機的自動升降系統,控制工作臺使其控制精度達到±0.02;可不可以進行純軟件仿真?一頭霧水中
2017-04-25 16:57:52
使用單片機控制步進電機(C語言源代碼已經在自己板子上燒寫過)題 目:單片機控制步進電機系統摘 要很多工業控制設備對位移和角度的控制精度要求較高, 一般電機很難實現, 而步進電機可精確實現所設定的角度
2021-07-06 06:00:26
伺服電機驅動器的作用是什么?如何實現高精度且高定位來控制伺服電機?
2021-10-12 13:01:01
大轉矩場合。產品特點:高性能、快速加減速、控制精度高額定負載條件下,0.1秒任意加、減速,自動限流,自動穩壓,保證無故障最優控制無速度傳感器電流矢量控制:轉矩控制精度高;穩速控制精度高低頻帶載能力強
2016-01-16 22:05:55
大轉矩場合。產品特點:高性能、快速加減速、控制精度高額定負載條件下,0.1秒任意加、減速,自動限流,自動穩壓,保證無故障最優控制無速度傳感器電流矢量控制:轉矩控制精度高;穩速控制精度高低頻帶載能力強:SVC/0.5Hz/150%轉矩`
2016-05-30 17:12:11
怎么才能實現高精度的步進電機位置控制
2023-10-13 07:40:50
0引言作為數控機床的重要組成部分,異步主軸電機的驅動控制需具備動態響應快、控制精度高與調速范圍廣三個基本的特性[1]。“間接磁場定向控制[2]”與“弱磁控制”組合是異步主軸電機常用的驅動控制方式
2021-09-06 06:22:29
由于項目需要樓主需要利用步進電機來實現一個開關拉門的動作。由于,控制精度要求不高,所以只需要樹莓派做控制器即可。網上樹莓派控制步進電機的教程大多局限于如圖所示的小功率步進電機,不符合項目需求。所以
2021-07-08 07:39:40
大轉矩場合。產品特點:高性能、快速加減速、控制精度高額定負載條件下,0.1秒任意加、減速,自動限流,自動穩壓,保證無故障最優控制無速度傳感器電流矢量控制:轉矩控制精度高;穩速控制精度高低頻帶載能力強
2015-12-01 23:59:53
大轉矩場合。產品特點:高性能、快速加減速、控制精度高額定負載條件下,0.1秒任意加、減速,自動限流,自動穩壓,保證無故障最優控制無速度傳感器電流矢量控制:轉矩控制精度高;穩速控制精度高低頻帶載能力強
2015-08-27 10:57:45
如題無刷電機做位置伺服控制:無刷直流電機的極對數為1對,電機的旋轉精度是不是正負60度。如果想要提高定位精度是不是選用極對數高的無刷機做位置伺服控制
2015-11-10 21:29:08
無刷電機控制精度分析及控制器簡述無刷電機控制中,無刷電機的控制精度如何?此外,對于工業縫紉機無刷電機控制器,我們認識了解它嗎?以上這種種都是與這一產品相關的,同時也是我們學習中必須要了解的,所以
2018-11-29 10:22:55
步進電機是一種將電脈沖信號轉換成角位移或線位移的一種器件。在不超載情況下,步進電機的轉速和運動距離取決于控制電脈沖的頻率和數量。其控制精度主要由兩方面決定:1、步進電機的每步精度,以2相混合式步進
2018-10-25 10:08:58
【單片機】步進電機控制一、操作目的二、操作內容三、預備知識四、操作接線圖五、程序框圖六、程序清單七、代碼詳解一、操作目的了解步進電機控制的基本原理,掌握步進電機轉動編程方法。二、操作內容讀取顯示器上
2022-01-10 08:26:47
在哪里呢?1.##控制精度和過載能力不同由于步進電機的精度一般是通過步距角的精準控制來實現的,步距角有多種不同的細分檔位,可以實現精準控制。而交流伺服電機的控制精度是由電機軸后端的旋轉編碼器保...
2021-06-28 08:26:22
小、噪聲也小。采用單片機可以方便地控制TA8435在幾種工作模式之間的切換,而且TA8435細分芯片具有價格低、控制簡單、工作可靠的特點,所以本方案實現的細分控制技術可以有效地提高步進電機的控制精度
2011-09-08 09:46:14
步進電機在控制的過程中怎么提高控制的精度
2023-10-12 06:02:50
步進電機是一種將電脈沖信號轉換成角位移或線位移的一種器件。在不超載情況下,步進電機的轉速和運動距離取決于控制電脈沖的頻率和數量。其控制精度主要由兩方面決定:1、步進電機的每步精度,以2相混合式步進
2021-09-16 06:56:37
步進電機的開環控制分析
2021-01-22 06:57:59
本人需做塊直流電機驅動器。但原來的板子對電機的轉速控制精度不夠,導致很多電機因轉速超范圍不合格。哪位精通于此的大神能幫忙?萬謝
2016-10-08 10:48:14
步進電機和伺服電機的控制精度有何區別?步進電機和伺服電機的低頻特性有何區別?
2021-09-30 08:23:52
直流電機運動控制的過程中怎么實現高精度的位置控制
2023-10-11 06:23:00
直線電機定位精度和重復定位精度,直線電機模組通常用于自動化機械和設備上,因此我們必須嚴格控制精度的變化,并始終進行精度測量。但是,精度測量的原理是什么?您對定位精度了解多少?讓我們帶大家一起學習!一
2021-07-12 06:56:34
四軸飛行器的電調PWM控制精度能達到多少?四軸調試碰到瓶頸了。。。請問把PWM的細分精度提上去會不會改善控制效果?
2019-03-29 04:18:25
什么電機可以實現高精度的位置控制,同樣其控制方式較為容易?
2019-09-20 09:49:03
本文提出了一種基于自尋優的PID 算法及最優PID 參數的確定方法,以實現對溫度的高精度控制,并用Mat l ab 軟件給出了仿真結果。實踐結果表明它的控制精度可以達到1%以內, 基本實
2009-07-11 08:46:54 22
22 無速度傳感器矢量控制的系統中,參數的檢測精度很大程度上決定系統的控制精度。文章從異步電機的數學模型出發,從電路分析的角度提出了一種簡單易行的參數辨識算法,實
2009-08-11 08:50:1922 浙江電網實行發電側電力市場后,對發電機組有功功率的控制精度作出了明確的規定,并且作為經濟考核的重要指標之一。臺州發電廠#7、8機組鍋爐采用直吹式制粉系統,由于其調
2010-02-03 14:20:5310 任務:設計并制作一個基于單片機高速高精度步進電機控制系統。目標:1)完成單片機控制系統的控制電路、高速、高精度步進電機驅動電路的設計,提供相應的電路原理圖
2010-08-08 17:29:27166 基于DSP(數字信號處理器)的電機控制技術可以對直流無刷電機進行精確的控制。選用高速DSP作為控制器,實時性好、控制精度高、抗干擾性強。本文從系統整體設計、硬件設計、仿真實
2011-05-24 15:04:37104 與傳統的直接轉矩控制相比,采用轉矩預測算法的直接轉矩控制能夠有效提高電機轉矩和定子磁鏈的控制精度。現有算法一般在計算過程專注于轉矩增量的控制,而對定子磁鏈的增量作
2011-09-22 15:28:1149 電機控制與驅動電路設計中模擬信號隔離技巧詳解
2016-01-06 17:28:450 步進電機是一種將電脈沖信號轉換成角位移或線位移的一種器件。在不超載情況下,步進電機的轉速和運動距離取決于控制電脈沖的頻率和數量。
2017-02-10 08:30:117486 正所謂“失之毫厘,謬以千里”,正是道出了精度的重要性。那么在電機控制中,轉速轉矩的控制精度測試是如何實現的呢?
2017-04-20 09:37:3312 對于電機控制來說,占空比是直接影響控制精度的關鍵參數,而如何快速分析出占空比變化的趨勢正是問題的核心。
2017-06-01 14:18:1426 采用模糊控制與PID控制結合,利用模糊控制實時修正PID參數,提高了系統的控制精度和魯棒性,有較好的實用性。
2019-06-24 08:14:005088 
最初對PCB確立±10%的控制精度要求是由電路中800MHz頻率信號的Direc Rambus 型的DRAM模塊(RIMM)應用所提出的,這是為了保證計算機主機和交換機的內部電路實現更高速的動作
2019-05-21 14:47:01819 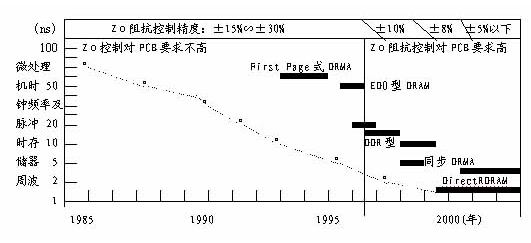
如何用一個PLC控制兩個或多個伺服電機同步運行主電機速度改變時,其它伺服電機也跟著同步運行。用第一個伺服驅動的輸出控制第二個伺服驅動器,就可以實現同步運動了,只要要求不是太高這種方法完全可行。同步分控制精度來確定控制方案的。
2019-07-18 08:00:0021 步進電機驅動器主要是區別在于步進電機線圈電流的控制精度。主要有三種驅動模式
2020-03-22 15:56:0012451 kt,該常數在大多數電機的技術手冊中都能找到。獲得需要的轉矩m所對應的電流iq也由此計算得到。但是,輸出轉矩和相應的電流iq之間的這種恒定關系的可信度很容易受到各種各樣的實際因素的負面影響,這樣的影響很容易產生轉矩控制中所不能接受的精度偏差。一些容易影響的實際因素如下:
2020-04-06 17:28:004297 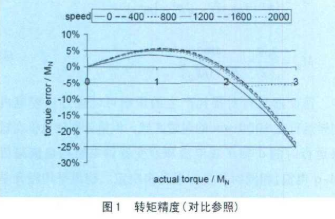
交流伺服電機的控制精度由電機軸后端的旋轉編碼器保證。對于帶標準2500線編碼器的伺服電機而言,由于驅動器內部采用了四倍頻技術,其脈沖當量為360°/10000=0.036°。
2020-08-26 15:15:114825 最初對 PCB 確立±10%的控制精度要求是由電路中 800MHz 頻率信號的 Direc Rambus 型的 DRAM 模塊(RIMM)應用所提出的,這是為了保證計算機主機和交換機的內部電路實現
2023-02-03 14:02:05795 步進電機存在空載啟動頻率,所以步進電機可以低速正常運轉,但若高于一定速度時就無法啟動,并伴有尖銳的嘯叫聲;同時,步進電機是開環控制,控制精度和速度都沒有伺服電機那么高。
2020-12-09 16:40:1341367 不管怎樣種類的電動執行器,控制精度全是十分關鍵的一點,電動執行器也是這般。在電動執行器的應用全過程中,有時候會發生控制精度低的難題,下邊電動執行器生產廠家將依據不一樣狀況來對這一狀況開展實際解讀。
2021-04-06 10:18:17890 控制解決方案,可有效應對上述問題,并適應各種復雜的工作環境以實現電機精密控制。 2020年底,在由“日本制造業會議”和“日刊工業新聞社” 所頒布的“2020年‘超級’零部件制造大獎”中,本套解決方案榮膺“高精度電機控制
2021-05-17 14:21:491961 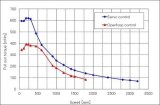
交流伺服電機的控制精度由電機軸后端的旋轉編碼器保證。以山洋全數字式交流伺服電機為例,對于帶標準2000線編碼器的電機而言,由于驅動器內部采用了四倍頻技術,其脈沖當量為360°/8000=0.045°。
2021-06-13 17:19:002843 半步驅動器后,步距角減少為0.9°,配上細分驅動器后其步距角可細分達256倍(0.007°/微步)。由于摩擦力和制造精度等原因,實際控制精度略低。同一步進電機可配不同細分的驅動器以改變精度和效果。此篇文檔以二相四線制步進電機演示一、 效果
2021-11-12 10:21:0152 電機控制和驅動器是許多應用的基礎,因為它們可以獲得高度的精度,進而轉化為更低的成本和更高的效率。電機控制電路執行的重要功能是確保轉子在不同的操作和負載條件下獲得關于繞組的精確位置,從而以足夠的精度
2022-08-05 09:46:511818 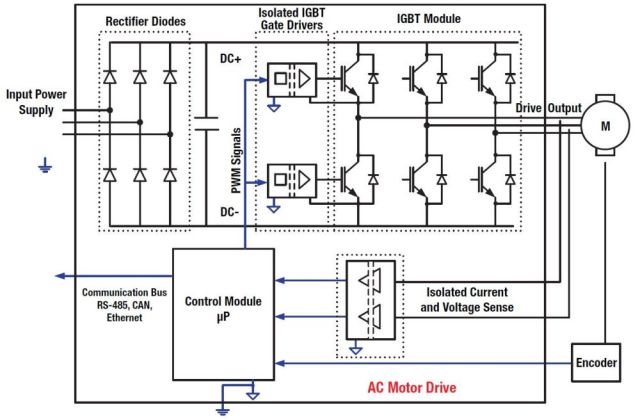
先說結論,有,而且是大大滴有!相較于其他類型的電機系統,比如變頻電機步進電機什么的,伺服電機具有無可比擬的優勢,它控制的精度非常的高。為啥伺服電機的控制精度高呢?我們簡單的說一下伺服電機的工作原理。
2022-08-19 14:09:274156 直流有刷電機通常采用微控制器來控制,我們可以讓他簡單地隨著電壓的大小改變轉速,功率控制非常簡單。本書會講解 如何更好地控制它的轉速、位置,使其達到我們想要的控制精度。
2022-11-11 20:57:212073 步進電機啟動頻率過高或負載過大易出現丟步或堵轉的現象,停止時轉速過高易出現過沖的現象,所以為保證其控制精度,應處理好升、降速問題。
2022-11-21 14:37:592196 另一種方法是使用電子控制器來控制電機的正反轉,這種方法具有更高的控制精度和可靠性,通常應用于大功率直流電機的正反轉控制。電子控制器可以通過改變電機的電流方向或者改變電機的相序來實現正反轉控制。
2023-03-01 11:13:555120 的。步進電機是靠單項脈沖電壓直接驅動的,不需要霍爾元件定位,可以通過控制加給電機的脈沖個數,來精確定位旋轉的角度。 3)基于驅動的原理不一樣,所以一般直流無刷電機用于控制精度要求不高的地方。 步進電機就用于控制精度要求
2023-03-01 11:50:254984 直線電機的精度還受到工作負載、速度和加速度等因素的影響。一般來說,直線電機在低速高精度定位時精度較高,但在高速大負載運動時精度會降低。因此,根據具體的應用場景和要求,需要選用適當的直線電機型號、控制算法和位置反饋系統,以保證其在實際運行中達到所需的精度。
2023-03-01 16:16:172468 伺服電機和步進電機都可以達到高精度的要求,但是伺服電機通常比步進電機具有更高的精度。這是因為伺服電機采用了閉環控制系統,可以通過實時的反饋控制,準確地控制電機的位置、速度和轉矩等參數,從而保證了更高的控制精度。同時,伺服電機具有更高的響應速度和更好的動態性能,可以在更短的時間內響應和調整輸出參數。
2023-03-07 15:05:094103 PID控制是一種經典的反饋控制算法,可以根據實際輸出值與預期輸出值之間的誤差信號,及時調整控制輸出值,從而實現對控制精度的提高。PID控制的主要原理包括比例控制、積分控制和微分控制。
2023-03-12 10:42:158193 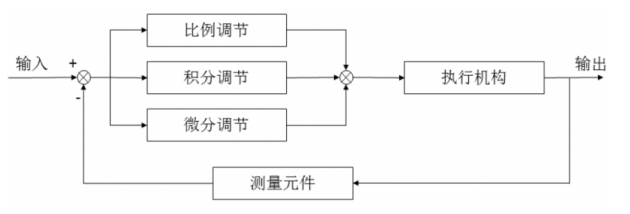
直線電機的控制方式一般可以分為以下幾種:
開環控制:直線電機的位置和速度可以通過直接控制電流大小和方向來實現,這種方式的控制簡單,但缺點是控制精度不高,容易受到外界干擾影響。
2023-03-21 16:57:553094 電機速度控制的方法有很多種,下面列舉幾種常見的方法:
1.?電壓調節法:
通過改變電機繞組的電壓來改變轉速,可以調整電機轉速但效率不高,控制精度低,一般不采用。
2023-03-26 22:16:423422 電機速度控制的方法有很多種,下面列舉幾種常見的方法:
1.?電壓調節法:
通過改變電機繞組的電壓來改變轉速,可以調整電機轉速但效率不高,控制精度低,一般不采用。
2023-03-26 22:22:424112 電機的。
2. 控制精度不同:矢量控制器由于能夠高精度地控制電機轉矩和轉速,因此具有更高的控制精度,能夠適用于高精密度的控制領域。而正弦波控制器則不如矢量控制器的控制精度高,適用于一些低精度控制。
2023-03-28 15:55:4214666 傳遞控制信號,它均勻地發出脈沖信號,每個脈沖對應一個步距角,進入驅動器后脈沖信號轉換成強電流信號,驅動電機轉動對應的角度,但是控制精度有限。
2023-05-09 11:10:19434 
閉環控制是指變頻器對電機的輸出頻率和轉速進行反饋控制,通過對電機的轉速進行監測和調節,實現對電機的精確控制。這種控制方式精度高、穩定性好,適用于對控制精度要求較高的應用場合。
2023-05-11 15:21:091814 FOC控制是一種高級電機控制技術,可以提高電機的功率、效率和控制精度。FOC控制的核心思想是使用磁場定向控制電機,將電機的輸出控制轉換為磁通量和電流的控制,從而使電機保持高效穩定的運行狀態。
2023-06-10 17:39:002000 電機控制器工作原理詳解 電機控制器是控制電動機運行的關鍵部件,通過對電機進行電流、電壓、頻率等參數的控制來實現對電機運行狀態的調節,具有很大的應用價值和意義。其工作原理如下: 1. 電機控制
2023-06-08 11:38:092606 伺服電機是一種常用于控制精度要求較高的機械設備的電機。它通過精密的控制裝置來保持輸出轉矩或轉速的穩定性,實現高精度的運動控制。伺服電機內部包含了控制器、編碼器、功率放大器和電機等幾個主要組成部分,它們協同工作來實現控制。
2023-08-26 11:11:272504 伺服電機用于工業自動化設備的精密控制,控制精度高、響應快,用途十分廣泛,在這里我 向大家介紹采用 Labview 圖形化編程軟件控制伺服電機的方法,采用的測控卡為美國 NI 公 司的多功能卡 PCIe-6341,電機為日本松下的 A5 系列電機。
2023-09-11 09:19:356 步進電機開環控制和閉環控制的區別概述:步進電機是一種特殊的電機,與其他電機不同的是它能夠以固定步進角度旋轉,能夠控制其轉速和轉向。步進電機常用于控制精度要求較高的場合,如打印機、數碼相機等。而對
2023-10-28 08:07:461306 首先需要確定步進電機控制系統的控制要求,包括控制精度、速度、轉向等方面。例如,在機械加工中,需要根據加工要求來確定步進電機的步進角度和轉速等參數。
2023-11-18 17:13:11857 ,控制精度越高。 剛性過大的后果包括: 1. 動態性能降低:剛性過大會使得伺服電機的動態響應能力降低,降低控制系統的速度和加速度性能。 2. 控制精度下降:剛性過大會導致伺服電機的位置跟蹤精度下降,無法準確控制運動軌跡,影響產品
2023-12-20 17:36:553073 伺服電機和步進電機在控制精度、低頻特性、矩頻特性、過載能力、編碼器類型等方面存在顯著差異。 ? 控制精度:步進電機通過控制脈沖的數量和頻率來控制轉動角度和速度,具有較好的位置控制性能。而伺服電機通過
2024-02-02 17:13:08195 電機逆變器通常配備各種反饋傳感器接口,如編碼器、傳感器等,用于實時監測電機的運行狀態和參數。通過反饋信號的獲取和處理,可以實現閉環控制,提高電機的控制精度和穩定性。此外,電機逆變器還提供多種保護功能,如過流保護、過載保護、過溫保護等,以確保電機和逆變器的安全運行。
2024-01-15 14:01:28266 伺服電機和步進電機在控制精度、低頻特性、矩頻特性、過載能力、編碼器類型等方面存在顯著差異。
2024-01-16 10:27:42192
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論