 電子發燒友App
電子發燒友App


2 相和 5 相步進電機比較
您已將運動控制解決方案的搜索范圍縮小到步進電機。現在是決定 2 相還是 5 相的時候了?ORIENTAL MOTOR 制造兩相 (1.8°/0.9°) 和五相 (0.72°/0.36°) 步進電機和驅動器。我們在這兩種技術方面的經驗為我們提供了獨特的視角。ORIENTAL MOTOR 進行了逐項快速比較,以澄清 2 相與 5 相爭論的困惑和迷思。該指南涵蓋了兩種技術在步進電機性能關鍵領域的基本差異:分辨率、振動、扭矩、精度和同步性。ORIENTAL MOTOR 經驗豐富的技術支持人員也可以為這兩種技術提供更深入的解釋。
2相,5相,有什么區別?
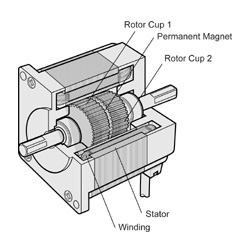
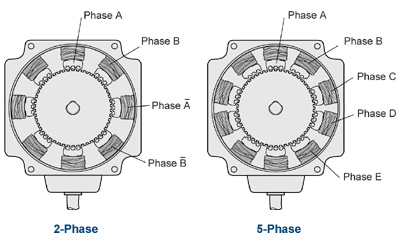
2 相和 5 相步進電機之間有兩個主要區別。第一個是機械的。步進電機基本上由兩部分組成,定子和轉子。轉子又由三個部件組成;轉子杯 1、轉子杯 2 和永磁體。在二相電機中,定子由 8 個帶小齒的磁極組成,而五相電機定子由 10 個磁極組成。定子中的每個磁極均設有繞組。
2 相和 5 相的第二個區別是相數。兩相電機有兩個相,“A”相和“B”相,而五相電機有五個相。本質上,相數是指按順序通電以吸引轉子的不同磁極組合。
2相和5相頭對頭
這些差異如何影響性能?步進電機的性能涉及許多因素。驅動步進電機的方法有很多種,而驅動器會極大地影響電機的性能。Wave Drive、Full Step、Half Step 和 Microstep 是最常見的驅動方法,每種方法都提供截然不同的性能。在不考慮各種驅動方法的情況下,這里是 2 相和 5 相步進電機的關鍵性能領域。
解決
在結構上,5 相步進電機與 2 相電機沒有太大區別。兩個電機的轉子都有 50 個齒。不同之處在于,因為 5 相電機有 10 個極,每相 2 個,轉子只需移動 1/10 齒距即可與下一相對齊。在 2 相電機中,轉子必須移動 1/4 個齒距以與下一相對齊(8 極,每相 4 個)。
這導致 2 相每轉 200 步,每步 1.8°,而 5 相每轉 500 步,每步 0.72°。5 相分辨率的提高是其設計所固有的。當與微步進驅動器結合使用時,5 相電機的步距可小至 0.00288°,但位置精度和重復精度仍受限于電機的機械精度。2 相和 5 相電機的機械精度均為 ± 3 弧分 (0.05°)。
振動
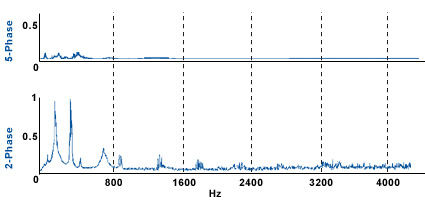
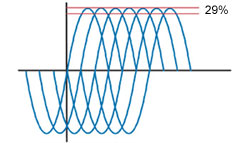
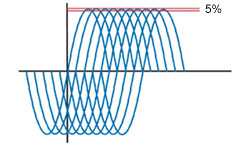
由于 5 相步進電機的步距角更小,0.72° 與 2 相電機的 1.8° 相比,5 相電機的振動遠小于 2 相電機。右圖顯示了 5 相電機產生的振動與 2 相步進電機產生的振動。如您所見,兩相電機會產生更大的振動。
*右側的圖表表示每轉 5K 步的微步進。這些圖表是通過將發電機連接到雙軸電機創建的。當電機振動時,生成的電壓被繪制成圖表。電機振動越大,產生的電壓就越大。
力矩
雖然 2 相步進電機和 5 相步進電機的輸出扭矩之間幾乎沒有差異,但 5 相電機確實具有更多“可用”扭矩。這主要是由于兩個電機產生的扭矩波動量。
半步或微步 5 相步進電機實際上增加了高達 10% 的扭矩,因為更多的相被通電。當半步進和微步進時,兩相電機會損失高達 40% 的扭矩,但是,許多兩相驅動器通過過驅動相反的扭矩矢量來補償。
當定子通電時,它會產生一個吸引轉子磁通量的電磁鐵。磁通量可以分解為兩個矢量,一個是法向矢量,一個是切向矢量。僅當存在切向分量時才會產生扭矩。下圖描述了切向通量的存在。
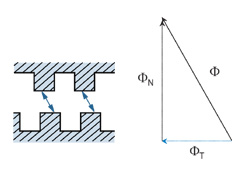
在?圖 1中,轉子齒與定子齒直接對齊,磁通只有法向分量,因此不產生扭矩。當轉子齒從圖 2、3 和 4中的定子齒移位時,??電機會產生扭矩。我們將此扭矩稱為負扭矩,因為扭矩試圖將牙齒拉回到穩定位置。在?圖 5中,磁通在定子齒之間均勻分配,沒有產生扭矩。通過?圖 6、7 和 8,?當移位的轉子齒移動以與下一個定子齒對齊時,會產生正扭矩。最后,轉子齒與下一個定子齒直接對齊(圖 1)。
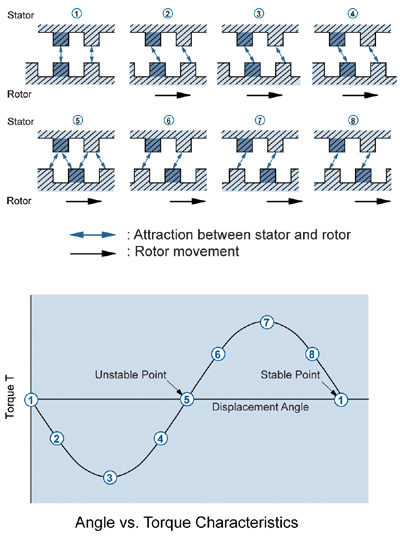
電機的每一相都為電機的總輸出扭矩貢獻正弦形扭矩位移曲線(如下圖所示)。峰值和谷值之間的差異稱為扭矩波動。轉矩脈動會引起振動,因此差異越大,振動越大。
隨著更多相位對電機總扭矩的貢獻,5 相電機的扭矩紋波比 2 相電機大大降低。2 相電機的峰值和谷值之間的差異可高達 29%,而 5 相電機僅為 5% 左右。由于轉矩脈動直接導致振動,因此 5 相電機比 2 相電機運行更平穩。
兩相扭矩位移
五相力矩排量
準確性/可重復性
精度有兩個組成部分,電氣和機械。電氣錯誤是由相位不平衡引起的。例如,電機的繞組電阻規格為±10%,可能電機額定功率為10W,但一相可能為9.2W,另一相可能為10.6W。相之間的這種差異會導致轉子比另一相更朝向一相對齊。
機械誤差有幾個組成部分,主要的一個是齒形。雖然電機上的齒應該是方形的,但沖壓工藝和模具的使用年限可能會導致某些齒或齒的一部分變圓。當齒變圓時,磁通量不是直接流動,而是可以流動到別處。因此,這些因素會影響電機的精度。
使用全步驅動器,兩相電機每 4 步重復一次狀態,而在 5 相電機中,狀態每 10 步重復一次。由相位不平衡引起的任何電氣錯誤在 2 相中每 4 步和 5 相中每 10 步被否定,只留下機械錯誤。
一旦電機完成完整的 360° 旋轉,同一個齒現在在原始起點處對齊,消除了機械誤差。由于 2 相電機每轉 200 步,每 200 步幾乎完美,而 5 相電機每轉 500 步,每 500 步幾乎完美。
同步性
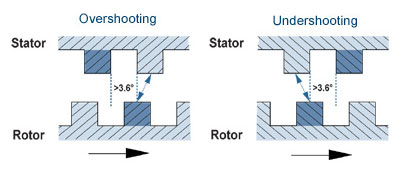
由于 5 相步進電機每步僅移動 0.72°,因此 5 相電機幾乎不可能因過沖/下沖而錯過一步。當轉子上的齒與定子上的正確齒不對齊時,電機將失去同步或錯過一步。什么會導致牙齒排列不齊?首先,為了使轉子齒不能正確對齊,另一個齒必須對齊到它應該對齊的位置。為了實現這一點,轉子必須有超過 3.6° 的上沖(超過正確的定子齒)或下沖(沒有移動足夠遠以與正確的定子齒對齊)。為什么是 3.6°?好吧,因為轉子齒被磁力吸引,正確的齒需要超過定子齒之間的一半才能對齊(轉子齒之間的 7.2° 除以 2 得到 3.6°)。因此,當轉子超出正確的定子齒超過 3.6° 時,下一個齒將在其位置對齊,從而導致您跳過一個步驟。相反,如果轉子未能移動超過 3.6°,則當前轉子齒將與定子齒保持對齊并且轉子不會旋轉,這意味著您錯過了一步。
驅動方式
2 相和 5 相步進電機都有多種驅動方法。以下是整步和微步驅動器概念的快速概述。
兩相全步系統(1.8°/步)
2-Phase Full Step 系統同時為 A 相和 B 相通電,并在正負之間切換以產生旋轉。

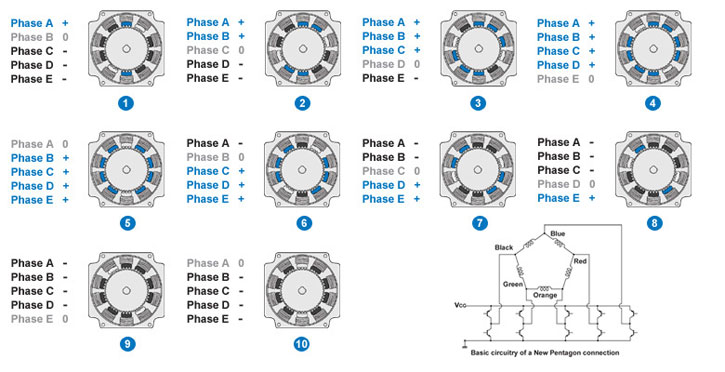
5 相全步系統(五邊形 4 相勵磁)(0.72°/步)
4相勵磁??系統是5相電機獨有的,運行更穩定。
微步進
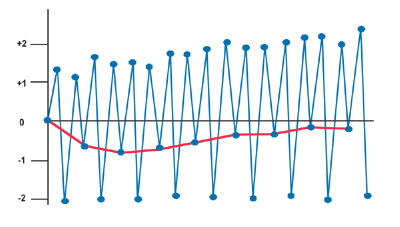
微步驅動器通過將電流減小到一個相位,同時將電流遞增到下一相位來劃分電機的基本步距角。這導致電機采取更小的步驟。使用微步驅動器,電機的基本步可以分為 1/1 到 1/250 范圍內的更小步。
右邊的插圖代表了微步進的基本概念。
圖 1 ?- A 相電流為 100%,因此轉子直接對齊。
圖 2 ?- A 相的電流減少到 75%,而 B 相現在有 25% 的電流。
圖 3 ?- A 相和 B 相的電流均為 50%,因此轉子直接排列在兩者的中間。
圖 4 ?- A 相現在為 25%,B 相為 75%,因此轉子移近 B 相。
圖 5 ?- A 相關閉,B 相處于 100%,因此轉子最終直接與 B 相對齊。

通過在此示例中對電機進行微步進,我們將 5 相步進電機每轉基本 500 步除以 5,將其增加到每轉 2,500 步。電機的分辨率現在為 0.144°。
與其他驅動器相比,微步進不僅提供了更高的分辨率,還確保了更平穩的運行、更低的振動和更低的噪音。
結論
根據您的特定應用,兩相電機可能就足夠了。然而,與 2 相步進電機相比,5 相步進電機提供更高的分辨率、更低的振動、更高的加速和減速速率(由于步距角更小),并且不太可能因過沖/下沖而失去同步。對于要求高精度、低噪音和低振動的應用,5 相是更好的技術。
想了解更多?
ORIENTAL MOTOR 的技術支持團隊和應用工程師將與您一起確定適合您應用的最佳解決方案。2 相、5 相、整步、微步?ORIENTAL MOTOR 經驗豐富的團隊成員對技術了如指掌。我們將根據您的需求找到合適的解決方案并解釋備選方案。致電 1-800-GO-VEXTA (468-3982) 與 ORIENTAL MOTOR 技術支持團隊成員交談。
審核編輯:湯梓紅










 工商網監
工商網監
評論