 電子發(fā)燒友App
電子發(fā)燒友App


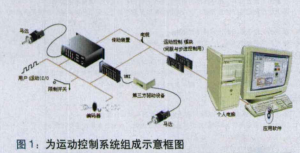
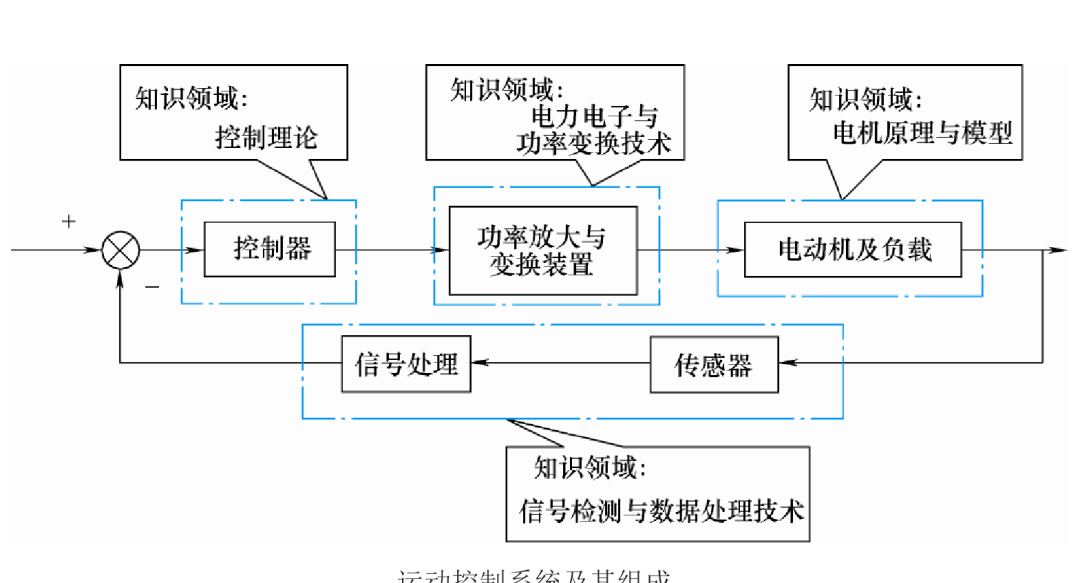
一、典型的運(yùn)動控制系統(tǒng)的架構(gòu)
工程實踐中,大多數(shù)控制系統(tǒng)為運(yùn)動控制系統(tǒng),比如飛機(jī)控制,其實就是通過控制飛機(jī)的幾個翅膀進(jìn)而調(diào)解作用在飛機(jī)上的氣動力來調(diào)整飛機(jī)的姿態(tài)。飛機(jī)的翅膀上面(舵面)都安裝有作動器(簡稱舵機(jī)),通過作動器的位置控制就可以控制舵面的位置,最終實現(xiàn)飛機(jī)的控制。
?
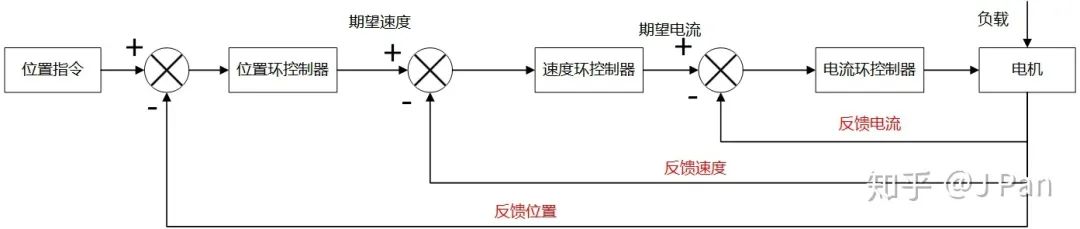
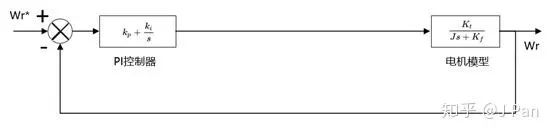
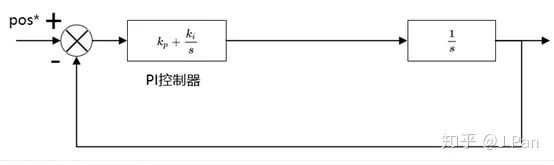
我們一般都會見到如下的一個典型的控制框圖,即通過三個環(huán)路來實現(xiàn)位置控制(以電機(jī)作為最終的出力元件)。外環(huán)為位置環(huán),中間為速度環(huán),最內(nèi)部為電流環(huán),很多第一次接觸這種控制方式的人都會多多少少有點(diǎn)疑問:為什么是這是三個環(huán)路?換一個行不行?
好了,如果我們將上面的環(huán)路稍微變形一下,可能會有助于大家的理解:
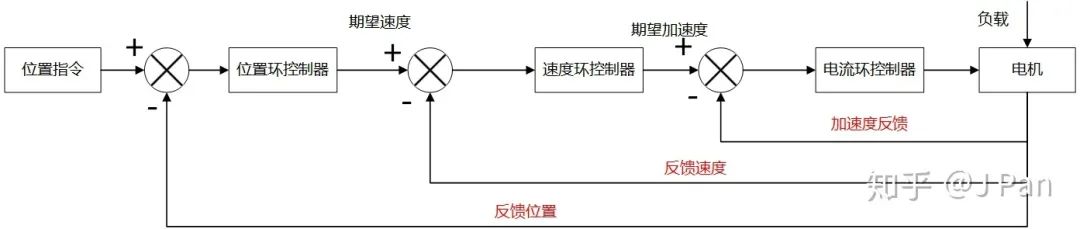
即最內(nèi)環(huán)換成了加速度環(huán),細(xì)心的童鞋可能已經(jīng)注意到了某種規(guī)律——位置、速度、加速度,內(nèi)環(huán)是外環(huán)的導(dǎo)數(shù)?這貌似是有那么一點(diǎn)點(diǎn)規(guī)律!——其實呢內(nèi)環(huán)電流環(huán)和加速度環(huán)是等價的,因為對于理想電機(jī)而言,其轉(zhuǎn)矩和電流成正比(比例就是轉(zhuǎn)矩系數(shù)),轉(zhuǎn)動慣量可近似認(rèn)為是常值,這樣加速度就和電流成正比,因為電機(jī)中電流更容易測量,所以呢一般用電流環(huán)來代替加速度環(huán)。
好了,那怎么理解這三個環(huán)路呢?為什么位置換控制器的輸出就是速度環(huán)呢?輸入呢?——可以這么簡單的理解:要想控制位置,可以通過調(diào)節(jié)速度來實現(xiàn),因為速度隨時間的積分就是位置,合適的速度經(jīng)過一定的時間就能達(dá)到想要的位置;同樣,速度可以通過調(diào)節(jié)合適的電流來實現(xiàn);那么怎么調(diào)節(jié)電流呢?
——調(diào)節(jié)電壓啊,怎么調(diào)節(jié)電壓呢?——逆變器啊!好了,是不是知識點(diǎn)都串起來了?——我們先簡單的了解一下,后面再進(jìn)行理論分析。
二、如何設(shè)計一個直流電機(jī)電流環(huán)
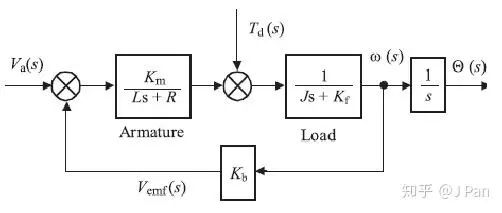
先以簡單的直流電機(jī)為例,一個典型的直流電機(jī)的數(shù)學(xué)模型如下:
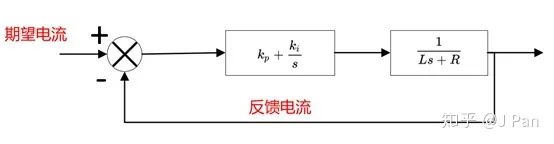
所以電流環(huán)的的一般控制模型為:
我們畫個伯德圖看一下這個系統(tǒng)的響應(yīng)是多少!
figure('color','w');
H = tf([1e6],[1 1500 1e6]);
bode(H);
grid on;
?
?
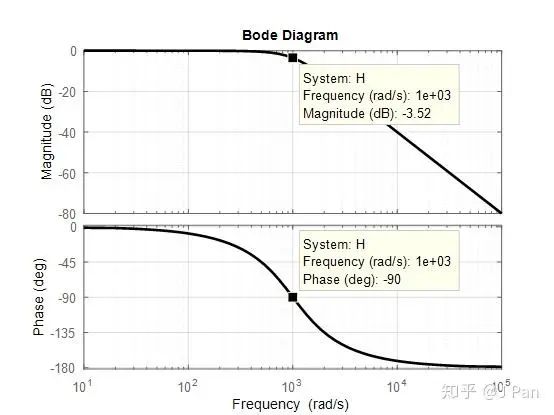
可見在1000rad/s時系統(tǒng)的幅值衰減到-3.53dB,相位滯后90°。
figure('color','w');
H = tf([1450 1e6],[1 1500 1e6]);
w=logspace(2,4,10000);
bode(H,w);
grid on;
?
?
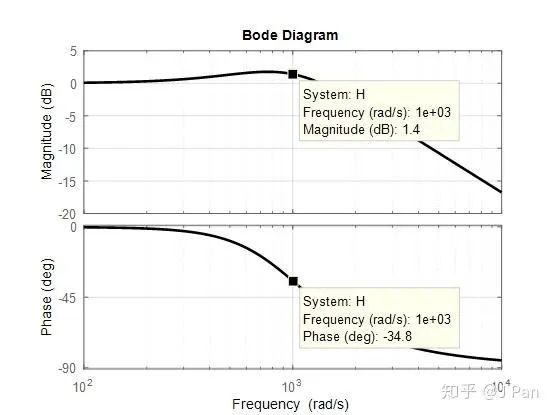
可見,有零點(diǎn)之后1000rad/s時幅值響應(yīng)為1.4dB,相位響應(yīng)為-34.8°,和無零點(diǎn)的簡化模型有區(qū)別,但是主要特征沒有發(fā)生明顯變化,為簡單期間呢,我們一般都會用無零點(diǎn)的模型進(jìn)行控制器設(shè)計。
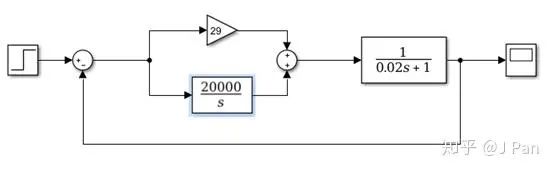
同時注意到,有零點(diǎn)的模型在截止頻率附近幅值響應(yīng)是大于0dB的,也就是大于1的,因此可以預(yù)見,系統(tǒng)的響應(yīng)會出現(xiàn)一定的超調(diào),我們不妨搭個simulink模型看看:
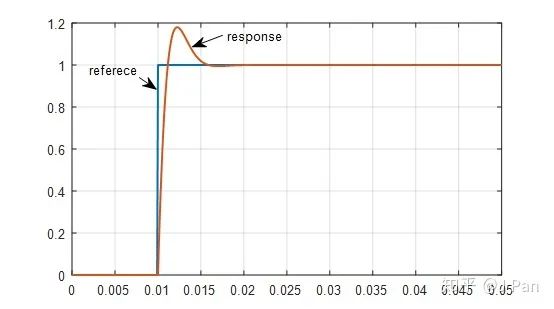
當(dāng)指令是階躍指令時,可以看到響應(yīng)非常快,同時又一定的超調(diào)。
三、什么是積分飽和
在一文中,我們說了,一個系統(tǒng)的截止頻率越高,能通過的信號的帶寬就越大,這樣系統(tǒng)的響應(yīng)就約快速、越及時,響應(yīng)時間就越短。理論上只要我們設(shè)定了想要的截止頻率和阻尼比?,我們都可以設(shè)計一個控制器進(jìn)行整定,已達(dá)到我們設(shè)定的帶寬——等等,這好像和我們的常識有悖啊,沒聽說過哪個系統(tǒng)的帶寬可以無限寬啊!
問題在哪呢?——首先我們前面的理論分析完全沒有問題,理論上截止頻率確實可以達(dá)到無限寬,但有一個前提,那就是我們要有一個能力無限大的電源!如何理解這句話?

我們把PI控制器的輸出顯示出來,上圖中綠色示波器位置。
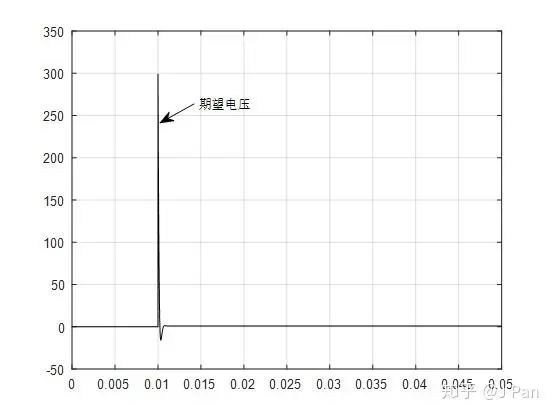
可以看出,為了達(dá)到較高的截止頻率,需要給繞組的電源電壓達(dá)到了接近300V,如果想提高截止頻率,這個值還會更高,而我們一般的供電電壓可能只有28V,那怎么辦呢?我們需要在PI控制器后面加一個限幅,如下圖所示:
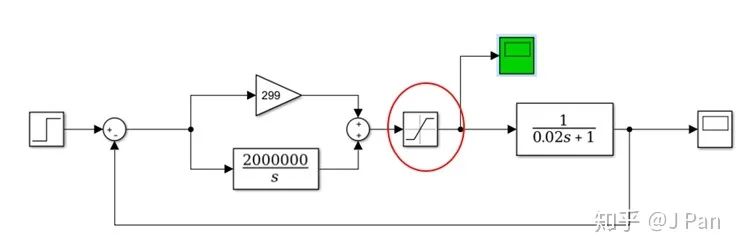
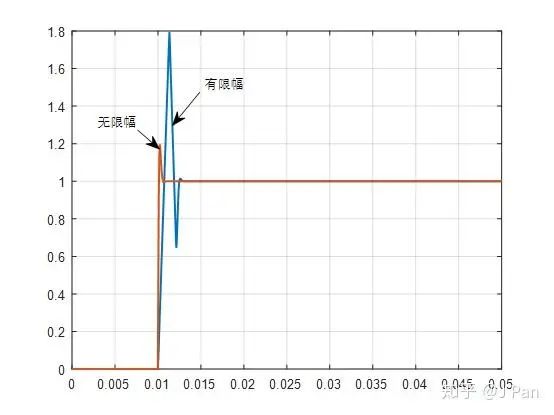
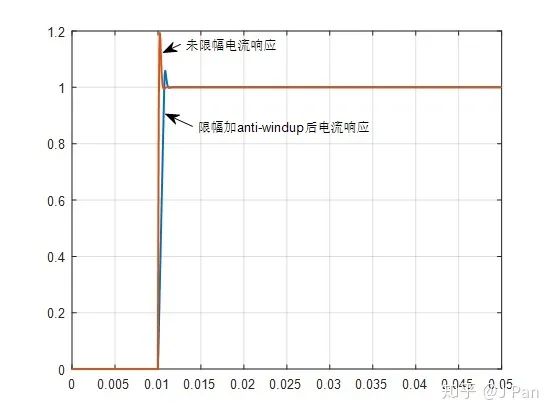
我們以為皆大歡喜了,可是我們計算完后又發(fā)現(xiàn)了問題,那就是加完限幅后系統(tǒng)出現(xiàn)了大的超調(diào),如下圖所示,這是什么原因呢?
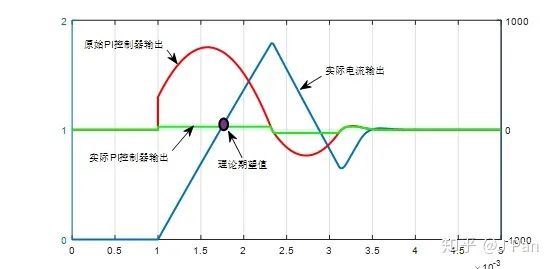
原因也很簡單,那就是積分器輸出飽和了!——什么意思?請看下圖,紅色線為原始的PI控制器輸出,因為限幅,其實際的輸出為綠色線所示(紅色和綠色線縱坐標(biāo)在右側(cè),藍(lán)色線縱坐標(biāo)在左側(cè))。在電流(藍(lán)色線)到達(dá)理論值前,由于誤差一直是正值,因此積分器不斷積分,數(shù)值也不斷增大,直到到達(dá)理論值時積分器達(dá)到達(dá)最大值,而這個值和限幅相比大的多(800比28)。在電流超過理論值后,誤差開始變?yōu)榉担e分器的數(shù)值開始減小,但由于之前的數(shù)值太大了,需要一段時間后才能減小到零甚至幅值,在到零之前積分器還是正值,而且大部分時間都是很大的值,因此限幅后的PI控制器在電流到達(dá)理論值后還會維持一段時間的正值(見綠色線),導(dǎo)致電流出現(xiàn)了較大的超調(diào),這種情況一般叫迎風(fēng)超調(diào)(windup)。
那怎么解決呢?——是不是可以減小PI控制器的積分增益呢?當(dāng)然是可以的,但這樣會導(dǎo)致響應(yīng)變慢,減小帶寬。一個最常見的方法就是采用抗積分飽和的方法(anti-windup),抗積分飽和的方法有很多種,比如積分遇限消弱法(clamping)、積分分離法以及反饋抑制抗飽和法以及變種等,我們簡要介紹一下反饋抑制飽和法。
反饋抑制飽和法的采用反饋的基本思想:當(dāng)飽和時,對積分項加入負(fù)反饋,使其盡快退出飽和,具體實現(xiàn)見下圖:
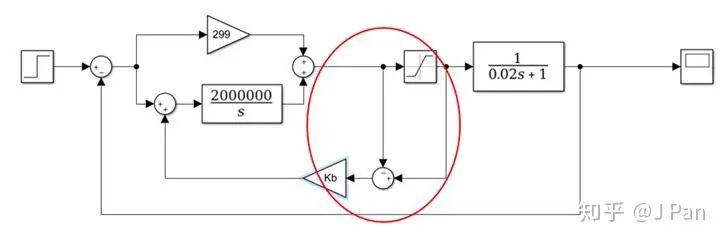
對積分回路增肌負(fù)反饋環(huán)節(jié),即當(dāng)積分器積分量較大時,通過負(fù)反饋減小其積分值,確保其在一定的范圍內(nèi)。進(jìn)行積分抑制飽和后其電流的實際響應(yīng)見下圖所示,可見響應(yīng)時間略慢(因為電壓限幅了),但是也沒有出現(xiàn)較大的超調(diào)。
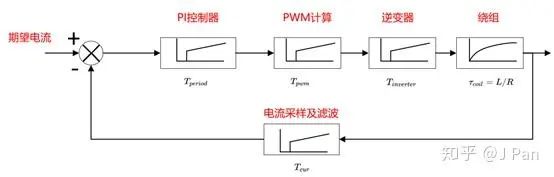
前面分析的都是理論情況,實際上還要復(fù)雜一點(diǎn),比如PI控制器的輸出要經(jīng)過一個計算周期才能更新一次,PWM計算模塊計算的三極管門信號最大可能延遲一個斬波周期,逆變器(比如IGBT)從接收到信號到管子作用也要一個時間,以及反饋電流的采集、濾波都有延遲時間,這些要么是延時環(huán)節(jié),要么是慣性環(huán)節(jié),都會影響帶寬,引入這些環(huán)節(jié)的電流環(huán)設(shè)計與前面所述的方法是一致的,只是略復(fù)雜一點(diǎn)(即將這些量與繞組一起等效成一個大的慣性環(huán)節(jié))。當(dāng)然,一般這些量與電機(jī)的電氣時間常數(shù)? 相比都比較小,大多數(shù)情況下為簡單期間可以先忽略。
四、如何設(shè)計速度環(huán)
有了電流環(huán),我們就可以設(shè)計速度環(huán)了,完整的速度環(huán)框圖如下圖所示:
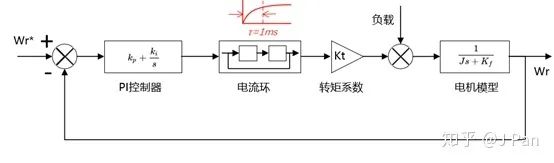
因為電信號的變化是非常快的,電機(jī)的電氣時間常數(shù)一般比機(jī)械時間常數(shù)小的多,通常我們將電流環(huán)的截止頻率設(shè)計的盡量高,速度環(huán)的截止頻率要低一些。
在速度環(huán)里,因為機(jī)械時間常數(shù)比電氣時間常數(shù)大的多,也就是說在一個電氣時間常數(shù)里面,電機(jī)的速度可以認(rèn)為是不怎么變的,也就是說為簡單起見,在速度環(huán)里,電流環(huán)可以認(rèn)為響應(yīng)非常快,可以忽略掉,從而簡化成如下結(jié)構(gòu):

同樣我們也加上積分反饋抑制飽和,完整simulink模塊如下:
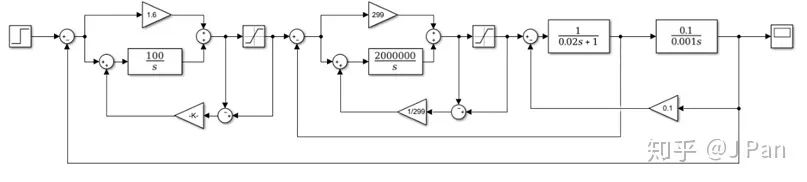
其電流響應(yīng)曲線和速度響應(yīng)曲線如下:
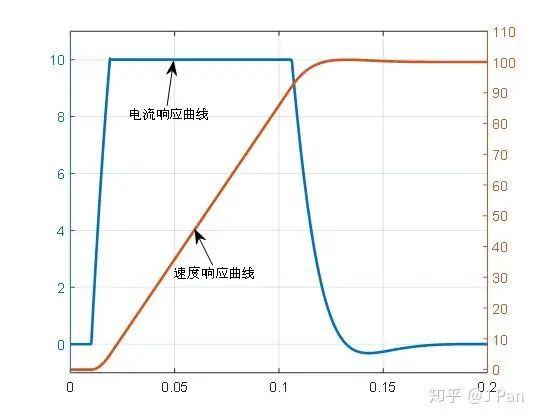
可見,最開始的時候,電流迅速達(dá)到設(shè)定的最大值,使電機(jī)達(dá)到最大速度,電流的穩(wěn)定時間明顯比速度小,結(jié)束的時候,電流也迅速下降實現(xiàn)制動。
五、如何設(shè)計位置環(huán)
有了電流環(huán)和速度環(huán),相信大家應(yīng)該已經(jīng)會設(shè)計位置環(huán)了。
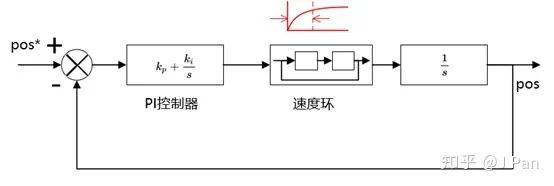
同樣,假定位置環(huán)的截止頻率小于速度環(huán),忽略速度環(huán)的響應(yīng)時間,則系統(tǒng)可簡化為:
怎么樣,簡單吧,那就拿simulink自己試試吧,別忘了積分飽和哦。
編輯:黃飛
?










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論