` 2相4線步進電機和 2相6線步進電機 有什么不同,6線電機多出來的那兩根線應(yīng)該怎么接控制序列和4線的一樣嗎,有人說6線比4線的跟適合跑高速這是為什么`
2014-08-30 15:41:49
怎樣選擇步進和伺服電機?如何配用步進電機驅(qū)動器?2相和5相步進電機有何區(qū)別,如何選擇?何時選用直流伺服系統(tǒng),它和交流伺服有何區(qū)別?步進和伺服電機可以拆開檢修或改裝嗎?
2021-10-29 07:20:12
步進電機+驅(qū)動ULN2003(1)1.步進電機步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù)。重要參數(shù):**1.相
2021-06-29 09:05:38
是電磁鐵的原理,是通過數(shù)字控制的電機,應(yīng)用非常廣泛。最近用stm32驅(qū)動了一款4相5線步進電機,所謂4相5線就是圖中所示的4段線圈和5根線吧,如果兩個線圈的中間抽頭不連,就是4相6線了,如果沒有中間抽頭
2019-09-19 17:26:46
是電磁鐵的原理,是通過數(shù)字控制的電機,應(yīng)用非常廣泛。最近用stm32驅(qū)動了一款4相5線步進電機,所謂4相5線就是圖中所示的4段線圈和5根線吧,如果兩個線圈的中間抽頭不連,就是4相6線了,如果沒有中間抽頭
2020-07-30 18:03:15
是電磁鐵的原理,是通過數(shù)字控制的電機,應(yīng)用非常廣泛。最近用stm32驅(qū)動了一款4相5線步進電機,所謂4相5線就是圖中所示的4段線圈和5根線吧,如果兩個線圈的中間抽頭不連,就是4相6線了,如果沒有中間抽頭...
2021-06-29 06:36:44
步進電機各相輪流接入整步電流后所產(chǎn)生的步距角叫做該步進電機的基本步距角。 F 相步進電機有 F 個繞組,這 F 個繞組要均勻地鑲嵌在定子上,因此定子的磁極數(shù)必定是 F 的整數(shù)倍,因此,轉(zhuǎn)子轉(zhuǎn)一圈
2015-12-28 22:19:35
步就是1.8度。 如果是兩相的步進電機的話。這個200步數(shù)/圈就是無細分。走的是一個整步。 因為1.8度角是兩相步進電機的基本步距角度。 如果調(diào)到.2000步數(shù)/圈 也就是走一圈需要2000步
2019-04-12 06:00:00
步進電機主要參數(shù)介紹相數(shù):步進電機的相數(shù)就是指線圈的組數(shù)。分別有二相,三相,四相,五相。通 常情況,相數(shù)高,步距角小,精度高。額定電流:電機正常運轉(zhuǎn)時的電流大小。步距角:它表示控制系統(tǒng)每發(fā)一個步...
2021-08-31 09:25:00
步進電機運轉(zhuǎn)的。 4 步進電機的使用 步進電機的從以下幾個角度闡述: (1)步進電機的選擇 步進電機有步距角(涉及到相數(shù))、靜轉(zhuǎn)矩、及電流三大要素組成。一旦三大要素確定,步進電機的型號便確定
2023-03-01 10:41:08
(涉及到相數(shù))、靜轉(zhuǎn)矩、及電流三大要素組成。一旦三大要素確定,步進電機的型號便確定下來了。1、步距角的選擇電機的步距角取決于負載精度的要求,將負載的最小分辨率(當(dāng)量)換算到電機軸上,每個當(dāng)量電機應(yīng)走
2014-01-21 15:17:44
步進電機,很多人DIY激光雕刻機,3D打印機的時候都會用到。那么他與普通的直流電機有什么不同呢?步進電機在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化
2016-01-13 17:15:16
步進電機運轉(zhuǎn)的。四、步進電機的應(yīng)用(一)步進電機的選擇步進電機有步距角(涉及到相數(shù))、靜轉(zhuǎn)矩、及電流三大要素組成。一旦三大要素確定,步進電機的型號便確定下來了。1、步距角的選擇 電機的步距角取決于負載
2018-11-26 16:58:21
步進電機定子相數(shù):單相/兩相/三相/四相/五相結(jié)構(gòu)工作原理文章目錄決定步距角的因素單相步進電機兩相步進電機三相步進電機四相步進電機五相步進電機相數(shù)與特性:分辨率、振動、轉(zhuǎn)速當(dāng)步進電機切換一次定子繞組
2021-07-06 06:00:20
什么是步進電機?步進電機的控制原理是什么?步進電機有哪些分類?具有哪些型號參數(shù)?步進電機怎么選擇?如何使用?
2021-10-27 06:20:45
步進電機總結(jié)步進電機分為單極性和雙極性單極性,COM端一直通電,通過另外四相的組合,實現(xiàn)正反轉(zhuǎn)(電流方向),半步等功能雙極性,通過各相位的通電組合實現(xiàn)轉(zhuǎn)動,半步等功能,細分器是通過改變各相的電流大小
2021-06-30 07:11:45
步進電機是什么?步進電動機是由哪些部分組成的?步進電機的工作原理是什么?怎樣去選擇步進電機?
2021-10-08 08:16:24
驅(qū)動器來支持。3.步進電機的相數(shù)相數(shù)就是繞組的的個數(shù),相數(shù)越多,步距角越小,步進電機控制起來越精確。相數(shù)越多,引出來的線就越多,一般兩相4根線,三相6根線。4.步進電機的極性5.拍...
2021-07-06 06:17:17
Part 1:名詞概念轉(zhuǎn)子齒數(shù)Z:轉(zhuǎn)子圓周上均勻分布的小齒個數(shù);定子相數(shù)M:步進電機線圈(繞組)個數(shù),以產(chǎn)生不同對極N、S磁場;通電方式C:①C=1 :單相輪流通電、雙相輪流通電;②C=2 :單
2021-07-07 07:01:09
步進電機的相數(shù):是指電機內(nèi)部的線圈組數(shù),目前常用的有二相、三相、四相、五相步進電機。電機相數(shù)不同,其步距角也不同,一般二相電機的步距角為0.9°/1.8°、三相的為0.75°/1.5°、五相的為
2021-08-31 07:17:50
相數(shù):產(chǎn)生不同對極N、S磁場的激磁線圈對數(shù)。常用m表示。拍數(shù):完成一個磁場周期性變化所需脈沖數(shù)或?qū)щ姞顟B(tài)用n表示,或指電機轉(zhuǎn)過一個齒距角所需脈沖數(shù),以四相電機為例,有四相四拍運行方式即
2021-07-07 06:38:47
步進電機的相數(shù)是指什么意思?步進電機的拍數(shù)是指什么意思?
2021-10-28 06:45:13
步進電機基礎(chǔ)(7.1)-步進電機的選擇方法-電機種類的選擇(各種步進電機的優(yōu)缺點)前言基本信息前言說明說明7.1 電機種類的選擇1 . 由PM型 、VR型 、HB型來選定2 . 步進電機的相數(shù)選擇
2021-06-28 08:47:37
電機以相數(shù)可分為 :二相電機、三相電機、四相電機、五相電機等。以機座號(電機外徑)可分為:42BYG(BYG為感應(yīng)子式步進電機代號)、57BYG、86BYG、110BYG、(國際標(biāo)準(zhǔn)),而像70BYG
2018-10-12 11:07:38
, BYG是指混合式步進電機(混合式步進電機是綜合了永磁式和反應(yīng)式的優(yōu)點而設(shè)計的步進電機。它又分為兩相、三相和五相,兩相步進角一般為1.8度 ,三相步進角 一 般為 1.2度 ,而五相步進角 一
2021-07-07 06:05:42
淺析步進電機的拍數(shù)與相數(shù)
2021-03-17 07:19:40
如何用郭天祥的51單片機開發(fā)板控制一個(步進電機+ULN2003驅(qū)動板 4相5線 5V步進減速電機28BYJ48-5V)通過按鈕可控制啟停和正反轉(zhuǎn),可以統(tǒng)計轉(zhuǎn)的圈數(shù)。
2019-08-07 10:07:33
。電機相數(shù)不同,其步距角也不同,一般二相電機的步距角為0.9°/1.8°、三相的為0.75°/1.5°、五相的為0.36°/0.72° 。在沒有細分驅(qū)動器時,用戶主要靠選擇不同相數(shù)的步進電機來滿足自己步
2014-01-11 14:49:42
一:線、相、極性“相” 就是說明步進電機有幾個線圈(也叫做繞組)。“線” 就是說明步進電機有幾個接線口。“極性” 分為 單極性 和 雙極性。如果步進電機的線圈是可以雙向?qū)щ姷模敲催@個步進電機就是雙
2021-07-07 07:43:37
、57、86、110等3、步進電動機構(gòu)造:由轉(zhuǎn)子(轉(zhuǎn)子鐵芯、永磁體、轉(zhuǎn)軸、滾珠軸承),定子(繞組、定子鐵芯),前后端蓋等組成。最典型兩相混合式步進電機的定子有8個大齒,40個小齒,轉(zhuǎn)子有50個小齒;三相電機的定子有9個大齒,45個小齒,轉(zhuǎn)子有50個小齒。4、步進電動機主要參數(shù)步進電機的相數(shù):是指電機
2021-06-28 13:06:37
一、步進電機相關(guān)概念 步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù)。 角位移:角位移就是步進電機的轉(zhuǎn)軸轉(zhuǎn)動行駛的位移。1.步進電機的相、線、極性...
2021-07-07 08:03:19
步進電機兩相步進電機 兩相步進電機一共有兩個線圈,A線圈,B線圈,如圖1 圖1 步距角的計算方法:轉(zhuǎn)子齒數(shù)(轉(zhuǎn)子極對數(shù))Nr,定子相數(shù)P Θ=180/Nr*P。 圖1:Θ=180/1*2=90。 控制線圈的通斷,即可以控制線圈的轉(zhuǎn)動,轉(zhuǎn)動的時序為 輸入123456789 +A110011...
2021-06-30 07:06:07
步進電機的選擇步進電機有步距角(涉及到相數(shù))、靜轉(zhuǎn)矩、及電流三大要素組成。一旦三大要素確定,步進電機的型號便確定下來了。1、步距角的選擇電機的步距角取決于負載精度的要求,將負載的最小分辨率(當(dāng)量
2011-08-16 08:35:44
步進電機基礎(chǔ)(2.4)- HB型步進電機的轉(zhuǎn)子齒數(shù)與主極數(shù)之間的關(guān)系前言基本信息公式前言說明HB型步進電機的轉(zhuǎn)子齒數(shù)與主極數(shù)之間的關(guān)系1. HB步進電機的相數(shù)、轉(zhuǎn)子齒數(shù)、主極數(shù)之間的表達式2. 相內(nèi)
2021-07-07 07:25:50
本帖最后由 houshannanhai 于 2017-4-10 10:44 編輯
請教一下,我基于步進電機做了一個Labview的控制程序,可以一邊控制步進電機,一邊顯示電機走過的步數(shù),但是
2017-04-10 10:12:59
步進電機基礎(chǔ)(2.1)- 定子相數(shù)的分類、結(jié)構(gòu)、原理定子相數(shù)的分類、結(jié)構(gòu)、原理1. 決定步距角的因素2. 單相步進電機3. 兩相步進電機4.三相步進電機5. 四相步進電機6. 五相步進電機7. 相數(shù)
2021-06-30 07:09:42
°/0.72° 。在沒有細分驅(qū)動器時,用戶主要靠選擇不同相數(shù)的步進電機來滿足自己步距角的要求。如果使用細分驅(qū)動器,則‘相數(shù)’將變得沒有意義,用戶只需在驅(qū)動器上改變細分數(shù),就可以改變步距角。 保持轉(zhuǎn)矩
2016-08-17 21:01:57
步進減速電機有步進角(涉及到相數(shù))、靜轉(zhuǎn)矩及電流三大要素組成。一旦三大要素確定,步進電機的基本上確定下來了。2、步進角的選擇電機的步進距角取決于負載精度的要求,講負載的最小分辨率(當(dāng)量)換算到電機軸上
2016-10-01 14:05:01
如何選擇電機的種類?不同相數(shù)的步進電機的優(yōu)缺點是什么?
2021-10-12 08:47:18
兩相步進電機和四相步進電機的不同點?兩相步進電機和四相步進電機的不同點:2相步進電機在定子上只有2個繞組,4根引出線,一般整步步距角為1.8度,半步步距角為0.9度,驅(qū)動器只須通過對兩相繞組電流通斷
2021-07-08 09:58:49
0.036°,但那是極為少見和昂貴的。計算的公式如下: 轉(zhuǎn)一圈需要脈沖數(shù) = 360 / 步距角 通常市面最多的兩相步進電機步距角是1.8度的,計算得出它轉(zhuǎn)一圈是需要200個脈沖,也就是需要走200步
2023-03-13 14:16:17
;><strong><font face="Verdana">兩相步進電機控制設(shè)計<
2009-12-16 10:36:31
峰值電流2A。兩相四線制步進電機1. 技術(shù)指標(biāo)(1)相數(shù):電機內(nèi)部的線圈組數(shù)。(2)拍數(shù):完成一個磁場周期性變化所需要脈沖數(shù)或?qū)щ姞顟B(tài)。兩相四線電機可以使用單四拍、雙四拍和八拍的方式驅(qū)動。(3)步距角:磁場變化一次電機轉(zhuǎn)過的角度,兩相四線電機步距角為0.9°/1.8°。2. 工作原理如圖所示
2021-07-08 06:19:30
單片機二相步進電機
2016-10-22 11:07:15
二相步進電機和三相步進電機有什么區(qū)別?二相步進電機和三相步進電機有什么區(qū)別?1. 電機的相數(shù)是指電機內(nèi)部的線圈數(shù)不同,兩相步進電機電機內(nèi)部是由2個線圈組成,而三相步進電機內(nèi)部是由3個線圈。2. 電機
2021-07-08 07:56:56
電機很重要的一項指標(biāo)。如果要求在瞬間頻繁啟動、停止,并且,轉(zhuǎn)速在1000轉(zhuǎn)/分鐘左右或更高。最好選擇反應(yīng)式或永磁式步進電機,這些電機的“空起頻率”都比較高。第三步:步進電機的相數(shù)選擇,這項內(nèi)容,很多
2016-01-18 11:38:08
步進電機一般用于控制角度或者位移,對于步進電機,很多特點及關(guān)鍵詞語需要了解1.相數(shù)一般相數(shù)是指NS的線圈對有幾對,比如常用的2相4線,具有2對NS磁極2.線數(shù)線數(shù)一般是根據(jù)線圈的地是否共地來判斷
2021-07-07 07:29:03
步進電機的相數(shù)是指電機內(nèi)部的線圈組數(shù),如4相就是有ABCD四組線圈。拍數(shù)是指完成一個循環(huán)的通電次數(shù)。例如按照ABCD順序完成一個循環(huán),就稱為單4拍。相鄰的兩個線圈也可以同時通電,例如可以按照
2021-07-08 08:20:07
最近用labview控制步進電機發(fā)現(xiàn)一些問題,先說一下我手頭的設(shè)備,有PCI 6602和PCI6035E兩塊卡,BNC2110盒子,還有一個NI myDAQ,一個四相步進電機和一個驅(qū)動器,驅(qū)動模式
2017-06-22 23:29:05
單片機四相步進電機 proteus仿真
2016-10-22 11:04:09
我是在做步進電機轉(zhuǎn)動實驗,如果9013E接地,B接電阻(電阻和74hc08相連),C接電動機的某相,電動機再接電源,這時電源為什么會短路啊
2017-10-15 08:24:44
四相步進電機原理圖
2020-03-02 03:18:28
四相五線步進電機是怎樣工作的?如何用stm32驅(qū)動一款4相5線步進電機呢?
2021-10-18 08:46:53
如何利用L298N驅(qū)動一臺兩相步進電機或四相步進電機?
2021-10-20 06:50:35
步進電機是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉(zhuǎn)過一個步距角。步進電機必須由雙
2021-07-08 09:46:38
如何實現(xiàn)兩相四線步進電機的驅(qū)動?
2021-12-21 06:12:43
如何實現(xiàn)四相八拍步進電機驅(qū)動?
2021-10-20 07:46:17
如何正確選擇步進電機?選擇步進電機要考慮哪些因素?
2021-10-08 06:01:07
如何正確選擇伺服電機和步進電機?選擇步進電機還是伺服電機系統(tǒng)?如何配用步進電機驅(qū)動器?2相和5相步進電機有何區(qū)別,如何選擇?何時選用直流伺服系統(tǒng),它和交流伺服有何區(qū)別?
2021-11-15 07:46:57
,最好選擇反應(yīng)式或永磁電機。這些電機的“空起頻率”都比較高。4)步進電機的相數(shù)選擇步進電機的相數(shù)選擇,這項內(nèi)容,很多客戶幾乎沒有什么重視,大多是隨便購買。其實,不同相數(shù)的電機,工作效果是不同的。相數(shù)越多
2022-09-05 14:20:59
怎么實現(xiàn)兩相四線步進電機的驅(qū)動?
2021-10-15 06:23:08
1.IO口輸出的高低電平電流過小不足以驅(qū)動直流電機,使用驅(qū)動模塊(芯片)后可以驅(qū)動電機。2.什么是步距角?即步長,和步進電機本身有關(guān),步進電機一般以步距角的整數(shù)倍運動。3.相數(shù)越高越精確4.步進電機
2021-07-08 08:12:23
?????????????? 公式(2. 1) 步進電機的步距角θs,其中Nr 為轉(zhuǎn)子極對數(shù),P為定子相數(shù) θs = ± [ (360°/mP) - (360°n/Nr) ]??????公
2021-07-08 09:34:05
1.步進電機的基本知識(1)拍數(shù)——每一次循環(huán)所包含的通電狀態(tài)數(shù)(電機轉(zhuǎn)過一個齒距角所需脈沖數(shù))(2)單拍制分配方式——狀態(tài)數(shù)=相數(shù)(3)雙拍制分配方式——狀態(tài)數(shù)=相數(shù)的兩倍(4)步距角 ——步進機
2021-07-08 09:33:28
請問STM32如何驅(qū)動小型4相步進電機?
2021-10-21 06:15:33
三相步進電機原理圖
2019-09-20 05:45:27
運行步數(shù)能夠預(yù)置,每轉(zhuǎn)一步自動減1,直到減到零,此時步進電機應(yīng)能停止運轉(zhuǎn)。4) 繞組驅(qū)動電流不低于0.1安培。5) 要求性能可靠、操作簡便。2、發(fā)揮部分1) 步進電機還可以按三相六拍方式(步距1.5
2013-05-24 15:15:25
步進電機的應(yīng)用
(一)步進電機的選擇步進電機有步距角(涉及到相數(shù)
2010-01-09 15:11:26 4026
4026 步進電機是一種專門用于位置和速度精確控制的特種電機。步進電機的最大特點是其“數(shù)字性”,對于控制器發(fā)過來的每一個脈沖信號,步進電機在其驅(qū)動器的推動下運轉(zhuǎn)一個固定
2010-06-03 09:46:262583 
步進電機作為執(zhí)行元件,是機電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動化控制系統(tǒng)中。那么你知道步進電機有哪些型號嗎?又是如何定義的呢?本文主要介紹步進電機型號定義及選擇,首先介紹的是步進電機的特點及分類,其次闡述了步進電機的型號定義及說明,最后介紹了步進電機的選擇及注意事項。
2018-04-25 14:58:3642332 步進電機的相數(shù)選擇,這項內(nèi)容,很多客戶幾乎沒有什么重視,大多是隨便購買。其實,不同相數(shù)的電機,工作效果是不同的。相數(shù)越多,步距角就能夠做的比較小,工作時的振動就相對小一些。大多數(shù)場合,使用兩相電機比較多。在高速大力矩的工作環(huán)境,選擇三相步進電機是比較實用的。
2019-01-11 10:35:3212873 選擇步進電機時首先要考慮各種步進電機的優(yōu)缺點,在這里先介紹不同相數(shù)的步進電機的優(yōu)缺點: ■兩相永磁式(PM)型步進電機 ⑴優(yōu)點 ①便宜。一般比同等大小的混合式(HB)型步進電機的價格
2020-05-31 09:26:423358 無論是步進電機,還是伺服電機,它們都為現(xiàn)代化的工業(yè)生產(chǎn)立下了不朽的功勞。但正所謂文無第一,武無第二,強強相遇,還是要分個高下的。下面,我們就從這幾個維度對比下步進電機以及伺服電機,看看我們在實際工作中選擇哪個更為合適。
2022-04-27 13:31:005537 步進電機的慣量選擇需要考慮到兩個方面:
電機本身的慣量:電機的慣量越大,電機的加速和減速所需要的時間就越長。因此,在選擇步進電機時,需要根據(jù)應(yīng)用需求和控制系統(tǒng)的要求綜合考慮電機的慣量
2023-03-08 14:26:403382 為您的應(yīng)用選擇正確類型的步進電機
2023-03-09 15:16:35590 
一模一樣的步進電機。 我們隨便選擇一個步進電機都是可以的,為了控制方便,我們這里選擇一個常見的5V的步進電機:28BYJ-48。
2023-03-21 15:33:41 4
4 依據(jù)電機在一定驅(qū)動速度的條件下,其所帶的負載轉(zhuǎn)矩、負載慣量(轉(zhuǎn)動慣M)和必需的加速轉(zhuǎn)矩,來計算所選擇步進電機的輸出轉(zhuǎn)矩。
負載轉(zhuǎn)矩 T L T_L TL時,欲驅(qū)動其到 f 2 f_2 f2
2023-03-21 10:53:210 為增進大家對步進電機的認識,本文將對步進電機的選型步驟以及方法予以介紹。 步進電機是電機諸多類型中的一種,同時也是其中步進電機應(yīng)用非常廣泛的一種。為增進大家對步進電機的認識,本文將對步進電機的選型
2023-03-22 09:38:333 Q A &問:步進電機每轉(zhuǎn)步數(shù)和步進角 步進電機適用于需要精確位置控制的低扭矩應(yīng)用場合。確實如此,在為您的設(shè)計應(yīng)用中選擇步進電機時,在選擇每轉(zhuǎn)步數(shù)和步進角時需要考慮哪些因素呢?
2023-05-11 09:43:12560 
現(xiàn)在,有一種趨勢是在不需要的項目中使用微控制器。這增加了項目的成本并增加了復(fù)雜性,因為它包括編程。同樣,大多數(shù)設(shè)計人員在想要驅(qū)動步進電機時總是選擇微控制器。這不是必需的,我們可以為這個應(yīng)用制作一個簡單的電路,包括一些芯片和分立元件。在本文中,我們將解釋這種構(gòu)建步進電機驅(qū)動器電路的非MCU方法。
2023-06-15 17:21:25655 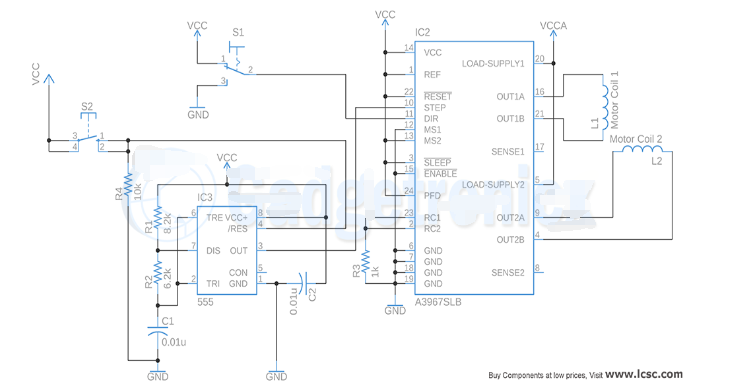
步進電機是一種離散運動的裝置,它和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國內(nèi)的數(shù)字控制系統(tǒng)中,步進電機的應(yīng)用十分廣泛。隨著全數(shù)字式交流伺服系統(tǒng)的出現(xiàn),交流伺服電機也越來越多地應(yīng)用于數(shù)字控制
2023-01-11 17:58:34667 
選擇步進電機時首先要考慮各種步進電機的優(yōu)缺點,根據(jù)設(shè)備的具體要求選擇合適的電機。在這里先介紹不同相數(shù)的步進電機的優(yōu)缺點:??一、兩相PM型步進電機??1、優(yōu)點:??(1)便宜。一般比同等大小的HB
2023-04-28 09:53:44408 選擇步進電機時首先要考慮各種步進電機的優(yōu)缺點,根據(jù)設(shè)備的具體要求選擇合適的電機。在這里先介紹不同相數(shù)的步進電機的優(yōu)缺點:
2023-07-21 17:27:11435 在直流電機,伺服電機和步進電機之間進行選擇是一項艱巨的任務(wù),包括在眾多設(shè)計因素之間取得平衡,即成本,速度,轉(zhuǎn)矩,加速度以及驅(qū)動電路,在選擇最佳方案時都起著至關(guān)重要的作用。您的應(yīng)用的電動機。
2023-07-09 16:22:081805 
從家中的簡單DVD播放器或打印機到高度復(fù)雜的CNC機器或機械臂,步進電機幾乎隨處可見。其能夠以電子方式控制精確運動的能力使這些電機在監(jiān)視設(shè)備、硬盤、CNC機器、3D打印機、機器人技術(shù)、裝配
2023-09-14 08:09:13859 電子發(fā)燒友網(wǎng)站提供《如何正確選擇伺服電機和步進電機.doc》資料免費下載
2023-10-27 11:03:530
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論