 電子發(fā)燒友App
電子發(fā)燒友App


前言
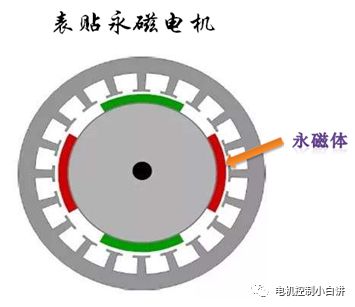
表貼式永磁同步電機(jī)憑借結(jié)構(gòu)簡(jiǎn)單、控制相對(duì)容易、轉(zhuǎn)矩精度高和動(dòng)態(tài)性好的優(yōu)點(diǎn),在中低速工業(yè)領(lǐng)域獲得了極其廣泛的應(yīng)用,比如主軸伺服、工業(yè)機(jī)器人等行業(yè)。本期我們就來(lái)聊一聊表貼式永磁同步電機(jī)如何進(jìn)行弱磁控制。
基于電機(jī)參數(shù)的弱磁控制算法
由于永磁體內(nèi)部的磁導(dǎo)率接近于空氣,所以可以直接將永磁體作為氣隙的一部分,對(duì)于三相繞組產(chǎn)生的電樞磁動(dòng)勢(shì)而言,表貼式永磁同步電機(jī)的氣隙是均勻的,因此表貼式永磁同步電機(jī)的d軸和q軸磁路可以認(rèn)為近似相同,即Ld=Lq=Ls。
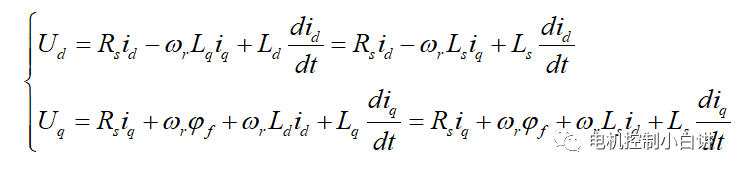
對(duì)于表貼式永磁同步電機(jī)(SPMSM),其磁場(chǎng)定向軸系下的動(dòng)態(tài)電壓方程如下:
忽略電流變化的動(dòng)態(tài)分量,SPMSM的穩(wěn)態(tài)電壓方程為:

在《永磁同步電機(jī)弱磁控制-基本概念》中,我們介紹了高速需要進(jìn)行弱磁控制的原因是為了防止輸出電壓過(guò)飽和而導(dǎo)致的電流環(huán)失控,所以弱磁控制就是通過(guò)人為的改變電流給定以減小Ud或者Uq,達(dá)到防止輸出電壓Us過(guò)飽和的目的。
電機(jī)控制的目的是讓電機(jī)輸出期望的轉(zhuǎn)矩(速度控制同樣是利用速度環(huán)調(diào)節(jié)轉(zhuǎn)矩給定),對(duì)于SPMSM而言,因?yàn)長(zhǎng)d=Lq,電機(jī)的電磁轉(zhuǎn)矩完全由永磁轉(zhuǎn)矩構(gòu)成:
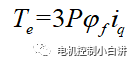
如果忽略永磁鏈的變化,SPMSM的輸出電磁轉(zhuǎn)矩與iq呈正比,所以在SPMSM控制系統(tǒng)中,工程師常常直接將速度環(huán)的輸出設(shè)計(jì)為iqref,而不是轉(zhuǎn)矩給定。
參數(shù)計(jì)算弱磁控制實(shí)現(xiàn):
1、利用iqref和電機(jī)角速度計(jì)算出需求的Ud_cal:
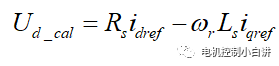
注意:這里計(jì)算Ud_cal時(shí),使用的idref是上一拍的值,因?yàn)槲覀冑M(fèi)半天勁就是為了計(jì)算本拍的idref。
2、利用Usmax和Ud_cal計(jì)算出Q軸能使用的最大電壓Uq_cal:

3、根據(jù)Uq_cal計(jì)算D軸電流指令idref:
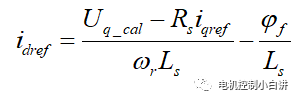
通過(guò)以上步驟獲得的電流指令組合(idref,iqref)就能使輸出電壓維持臨界飽和,理論上可以保證電流環(huán)控制穩(wěn)定。
這種利用反饋轉(zhuǎn)速、Usmax和電機(jī)本體參數(shù)計(jì)算D軸弱磁電流指令,使電流環(huán)輸出電壓Us不超過(guò)最大輸出電壓Usmax的方法就是參數(shù)計(jì)算弱磁控制。
參數(shù)計(jì)算弱磁策略只需要利用電機(jī)本體參數(shù)進(jìn)行簡(jiǎn)單的計(jì)算就能實(shí)現(xiàn)弱磁控制,便于理解且容易實(shí)現(xiàn)。雖然這種方法雖然從理論上能保持控制系統(tǒng)的可控性,但是在實(shí)際工程產(chǎn)品上卻基本不會(huì)使用。這主要是因?yàn)檫@種弱磁控制極度依賴準(zhǔn)確的電機(jī)本體參數(shù),然而電機(jī)本體參數(shù)是難以準(zhǔn)確獲得的(其實(shí)是根本不可能獲得)。
可能有的攻城獅會(huì)有這樣的疑問(wèn):現(xiàn)在市面上很多廠家的變頻器都有參數(shù)離線辨識(shí)功能,能夠獲取準(zhǔn)確的電機(jī)參數(shù),并用來(lái)進(jìn)行磁場(chǎng)定向都能具有良好的性能,這些參數(shù)還能不準(zhǔn)確嗎??
其實(shí)就算是某些宣稱能獲取準(zhǔn)確參數(shù)的廠家,其離線辯識(shí)獲取的電機(jī)參數(shù)也不可能真的準(zhǔn)確(就是這么不給這些廠家面子),以電控小白的經(jīng)驗(yàn)來(lái)看辯識(shí)參數(shù)的偏差能控制在10%以內(nèi)都已經(jīng)很不錯(cuò)了。利用辯識(shí)出來(lái)的參數(shù)進(jìn)行磁場(chǎng)定向能獲得良好的性能,是因?yàn)閰?shù)的偏差主要是導(dǎo)致軟件定向角度與真實(shí)磁場(chǎng)角度之間存在一定的角度偏差,影響電機(jī)轉(zhuǎn)矩精度和最大轉(zhuǎn)矩能力,在一般的應(yīng)用場(chǎng)合這些問(wèn)題不會(huì)暴露出來(lái)。
也許部分攻城獅朋友會(huì)說(shuō),電控小白盡整一些沒(méi)用的東西,這種方法在實(shí)際產(chǎn)品上都不用,你還在這里羅里吧嗦半天,這真是冤枉啊。電控小白之所以會(huì)介紹這種方法,是希望通過(guò)它讓大家能理解弱磁控制的基本思想。
基于D軸的電壓外環(huán)弱磁控制
通過(guò)參數(shù)計(jì)算的弱磁控制算法,我們可以看出弱磁控制的基本思路是通過(guò)人為增加一個(gè)小于0的Idref,使Q軸電壓降低,以達(dá)到減小輸出電壓幅值的目的。
基于這個(gè)思路,我們可以改用一個(gè)調(diào)節(jié)器去自動(dòng)生成Idref,根據(jù)系統(tǒng)最大輸出電壓(Usmax)與電流環(huán)輸出電壓幅值(Us)的偏差來(lái)自動(dòng)減小Q軸電壓(Uq),這就是電壓外環(huán)弱磁控制,其基本控制框圖如下:
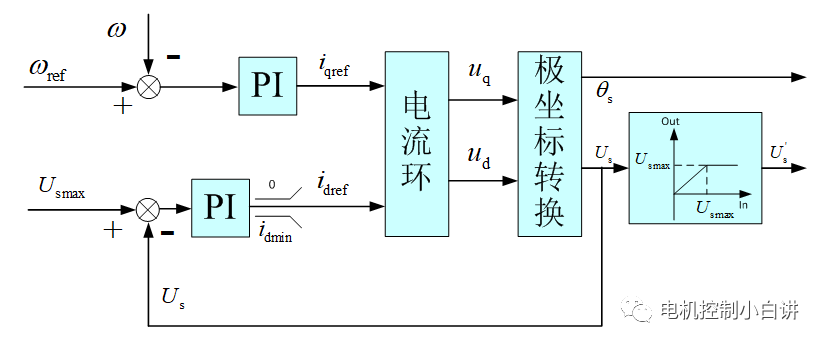
結(jié)合控制框圖,我們可以詳細(xì)分析一下這種電壓外環(huán)弱磁控制的流程:
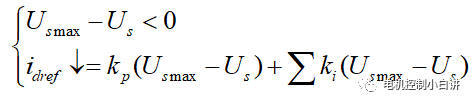
1)電壓外環(huán)的輸出是PI調(diào)節(jié)的結(jié)果,具體實(shí)現(xiàn)如下

2)當(dāng)電機(jī)的轉(zhuǎn)速升高或者iqref變大,導(dǎo)致電流環(huán)輸出電壓Us超過(guò)Usmax時(shí),因?yàn)閁smax-Us<0,在電壓外環(huán)PI作用下(尤其是積分的作用),idref將從0變?yōu)樨?fù)數(shù);
3)電流環(huán)根據(jù)電壓外環(huán)輸出的idref進(jìn)行D軸電流控制,使Q軸電壓Uq減小,實(shí)現(xiàn)Us的降低;
4)當(dāng)電壓外環(huán)輸出的idref使Us降低到等于Usmax時(shí),Usmax-Us=0,電壓外環(huán)的PI輸出不在變化,idref維持不變,電流環(huán)輸出電壓維持Usmax輸出,實(shí)現(xiàn)對(duì)電流的控制;
5)當(dāng)電機(jī)轉(zhuǎn)速降低或者iqref減小時(shí),電流環(huán)輸出電壓Us將小于Usmax,Usmax-Us>0,在電壓外環(huán)PI作用下,idref將增大(負(fù)數(shù)—>0);使Q軸電壓Uq增大,實(shí)現(xiàn)Us增大,將Us維持在Usmax附近,保證了控制系統(tǒng)電壓利用率。
通過(guò)上面的5步分析,希望能幫助大家更好的理解電壓外環(huán)弱磁的機(jī)制:利用電流環(huán)輸出電壓Us與最大輸出電壓Usmax的偏差,自動(dòng)調(diào)節(jié)出D軸弱磁電流idref,使電流環(huán)的輸出電壓能維持在Usmax輸出,保證系統(tǒng)電壓利用率,使系統(tǒng)運(yùn)行在最優(yōu)狀態(tài)。
Tips:
1)電壓外環(huán)的輸出值限制為小于等于0很重要:因?yàn)榈退俜侨醮艆^(qū),電流環(huán)的輸出電壓肯定小于Usmax,如果這時(shí)候電壓外環(huán)啟動(dòng)工作,則會(huì)正向積分,輸出一個(gè)大于0的idref,使系統(tǒng)輸出電壓增大,這對(duì)我們控制是不利(尤其是極低速區(qū),即使idref=ismax,也不可能使Us達(dá)到Usmax),這時(shí)候就需要將電壓外環(huán)的輸出限制為小于等于0,使電壓外環(huán)只具有弱磁能力,而不能增磁。
2)電壓外環(huán)依靠PI進(jìn)行調(diào)節(jié),理論上雖然可以將電流輸出控制為Usmax,但真實(shí)情況是Us會(huì)在Usmax附近來(lái)回波動(dòng),PI的強(qiáng)度會(huì)影響Us的波動(dòng)大小;不合適的PI參數(shù)可能會(huì)導(dǎo)致電壓外環(huán)振蕩失控。
3)電壓外環(huán)弱磁控制需要Usmax與Us之間先產(chǎn)生偏差后才能調(diào)節(jié)idref,并需要一定的調(diào)節(jié)時(shí)間才能將Us控制到Usmax附近,因此在動(dòng)態(tài)響應(yīng)較快的應(yīng)用場(chǎng)合,負(fù)載或轉(zhuǎn)速快速變化時(shí),電流可能會(huì)存在短時(shí)失控(一般是ms級(jí)時(shí)間),這是正常現(xiàn)象。在保證系統(tǒng)穩(wěn)定性的前提下,增強(qiáng)PI參數(shù)可以縮短失控時(shí)間。
優(yōu)點(diǎn):不受電機(jī)參數(shù)的影響,即使電機(jī)參數(shù)偏差很大,也能自動(dòng)調(diào)節(jié)弱磁電流,實(shí)現(xiàn)控制系統(tǒng)的弱磁控制;
缺點(diǎn):引入了PI控制環(huán)路,增加了系統(tǒng)的不穩(wěn)定風(fēng)險(xiǎn),不合理的PI設(shè)置可能導(dǎo)致弱磁環(huán)路振蕩甚至控制失效。
基于DQ雙軸的電壓外環(huán)弱磁控制
基于D軸的電壓外環(huán)弱磁控制通過(guò)PI自動(dòng)調(diào)節(jié)idref實(shí)現(xiàn)弱磁控制,這種弱磁方法對(duì)有限轉(zhuǎn)速系統(tǒng)而言一般都能滿足使用需求,但是它還有可以優(yōu)化的地方。
我們先來(lái)分析一種工況:
前面電控小白說(shuō)過(guò)實(shí)際電機(jī)系統(tǒng)都存在最大可運(yùn)行電流,因此idref會(huì)有一個(gè)最小值idmin(id是負(fù)數(shù),對(duì)應(yīng)絕對(duì)值最大)限制。電機(jī)進(jìn)入弱磁區(qū)域后,隨著電機(jī)轉(zhuǎn)速不斷升高,idref將會(huì)逐漸減小(絕對(duì)值增大);只要轉(zhuǎn)速升高到足夠高,idref就會(huì)達(dá)到idmin,此時(shí)D軸電壓外環(huán)飽和,失去弱磁調(diào)節(jié)能力,如果電機(jī)轉(zhuǎn)速繼續(xù)升高,系統(tǒng)將再次失去控制。
為了處理這種工況,進(jìn)一步提升電機(jī)的弱磁運(yùn)行區(qū)域,電控小白給大家分享一種優(yōu)化的DQ雙軸弱磁控制策略。
我們繼續(xù)分析上面的工況:
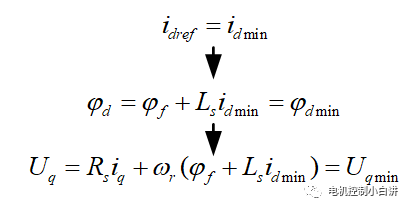
對(duì)于D軸電壓外環(huán)輸出飽和這種工況,此時(shí)的idref=idmin,Uq達(dá)到當(dāng)前轉(zhuǎn)速下所能達(dá)到的最小值,此時(shí)已經(jīng)不能通過(guò)減小Uq來(lái)減小Us。
Us是Ud和Uq的矢量合成,減小Ud的絕對(duì)值同樣可以減小Us,因此這時(shí)候可以借鑒D軸電壓外環(huán)弱磁的思想,通過(guò)電壓外環(huán)來(lái)調(diào)節(jié)iqref,實(shí)現(xiàn)Us的減小,保證控制系統(tǒng)穩(wěn)定,拓展電機(jī)的弱磁運(yùn)行區(qū)域,其控制框圖如下:
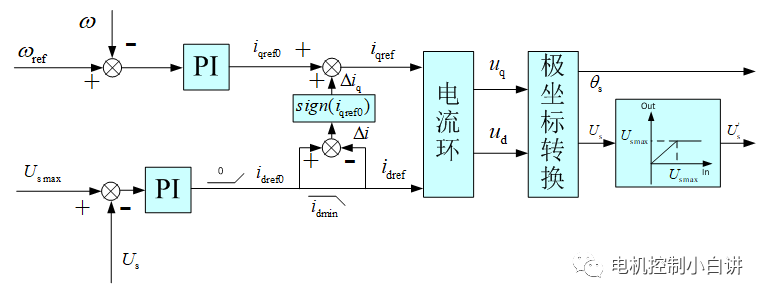
我們以正轉(zhuǎn)電動(dòng)(wr>0,iqref>0)工況來(lái)分析一下DQ雙軸弱磁策略的作用機(jī)制:
1)當(dāng)D軸電壓外環(huán)飽和后,idref被限幅為idmin,此時(shí)電流環(huán)輸出Us超過(guò)Usmax,在PI作用下,idref0將繼續(xù)減小,使idref0與idref的偏差小于0:
2)sign(iqref0)是取iqref0的符號(hào),即:
對(duì)于正轉(zhuǎn)電動(dòng)(iqref>0)情況,sign(iqref0)=1,因此:
因此利用△iq就能減小Q軸電流給定iqref,從而使Ud的絕對(duì)值減小,保證電流的受控性,拓展了電機(jī)的弱磁運(yùn)行區(qū)域。
采用DQ雙軸電壓外環(huán)弱磁控制可以拓展電機(jī)的弱磁運(yùn)行區(qū)域,但是這種拓展也是有限制的,不能使電機(jī)轉(zhuǎn)速無(wú)限制的升高。當(dāng)控制系統(tǒng)在電壓外環(huán)的調(diào)節(jié)作用下,達(dá)到了idref=idmin,同時(shí)iqref=0,則系統(tǒng)已經(jīng)處于極限弱磁轉(zhuǎn)速,這表明在當(dāng)前母線電壓下,控制器所能使電機(jī)可控運(yùn)行的極限能力也就是這樣了,如果電機(jī)被主動(dòng)負(fù)載拖動(dòng)繼續(xù)升高轉(zhuǎn)速,電流將失去控制,可能導(dǎo)致變頻器損壞。
這里舉一個(gè)形象化的栗子方便大家理解:以電控小白現(xiàn)在的收入能力(母線電壓),極限也就是在掏空六個(gè)錢(qián)包的情況下能在六環(huán)買(mǎi)一套80平的小房子(極限轉(zhuǎn)速)(后悔年輕的時(shí)候沒(méi)努力搞好技術(shù),導(dǎo)致現(xiàn)在收入太低),如果忽視這個(gè)極限能力,強(qiáng)行去五環(huán)內(nèi)買(mǎi)了一套三居,那電控小白最終只能是被房貸壓垮,最后房子被銀行沒(méi)收,首付都打水漂了(控制器損壞)。
總結(jié)
這次分享主要介紹了表貼式永磁同步電機(jī)弱磁控制的基本思想,并結(jié)合這種思想介紹了三種常用的弱磁控制方法:參數(shù)計(jì)算弱磁策略、D軸電壓外環(huán)弱磁策略、DQ雙軸電壓外環(huán)弱磁策略。
參數(shù)計(jì)算弱磁是基于理想的分析誕生的弱磁策略,對(duì)電機(jī)本體參數(shù)極度依賴,不具有產(chǎn)品化的實(shí)際意義。
D軸電壓外環(huán)弱磁策略規(guī)避了對(duì)電機(jī)本體參數(shù)的依賴,增強(qiáng)了控制系統(tǒng)的魯棒性,在工程產(chǎn)品中獲得了廣泛使用,這種弱磁方法基本能滿足實(shí)際工況使用。
對(duì)D軸電壓外環(huán)弱磁策略進(jìn)一步優(yōu)化得到DQ雙軸電壓外環(huán)弱磁策略,可以進(jìn)一步拓展電機(jī)的弱磁區(qū)域;但是對(duì)Q軸電流的調(diào)節(jié)會(huì)降低系統(tǒng)出力能力,在實(shí)現(xiàn)上需要注意的細(xì)節(jié)更多。各位攻城獅可以結(jié)合自己的產(chǎn)品實(shí)際需求選擇適合的弱磁策略。
本篇文章主要是針對(duì)有限轉(zhuǎn)速電機(jī)系統(tǒng)的弱磁方法分析,在本專題的后續(xù)文章中,電控小白將帶來(lái)關(guān)于無(wú)限轉(zhuǎn)速系統(tǒng)電機(jī)的弱磁控制策略,并為大家分享另外一種弱磁控制思路—單電流調(diào)節(jié)器弱磁控制策略。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論