 電子發(fā)燒友App
電子發(fā)燒友App


1 L9942 的微步模式
L9942步進(jìn)電機(jī)控制器具有全步、半步和微步模式。微步模式提供32個(gè)可編程電流調(diào)節(jié)步進(jìn),步進(jìn)角度超過(guò)360°。這意味著每個(gè)象限有8個(gè)不同的電流水平。
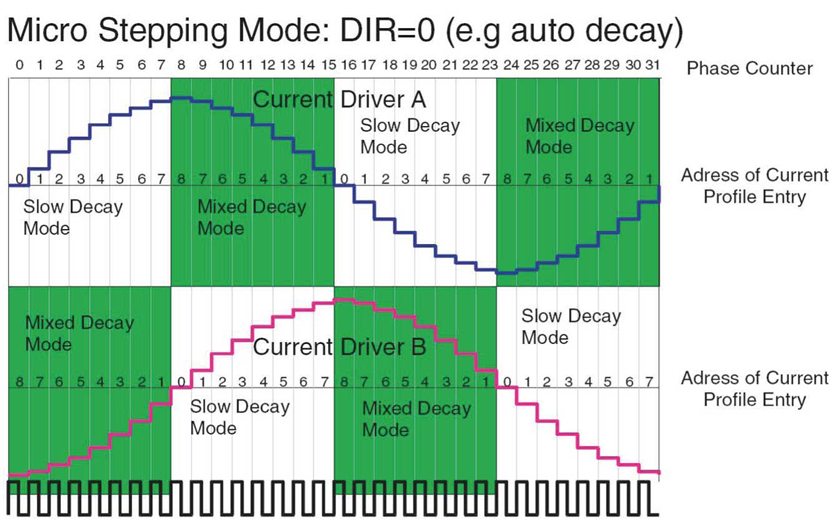
圖 1 L9942的微步模式
每一步電流都由PWM控制調(diào)節(jié),PWM開(kāi)啟時(shí)間由振蕩器固定,關(guān)閉時(shí)間由測(cè)量的電流設(shè)置。通過(guò)查找表將高壓側(cè)開(kāi)關(guān)提供的內(nèi)部電流鏡反饋與預(yù)設(shè)(可編程)電流值進(jìn)行比較。當(dāng)相位中的電流與查找表中的值匹配時(shí),相位將關(guān)閉,直到下一次PWM接通。因此,通過(guò)輸出的PWM控制,電流正弦波以32步近似。這也適用于半步和全步操作模式。

圖2 L9942電流調(diào)節(jié)框圖
2 通用電機(jī)概念
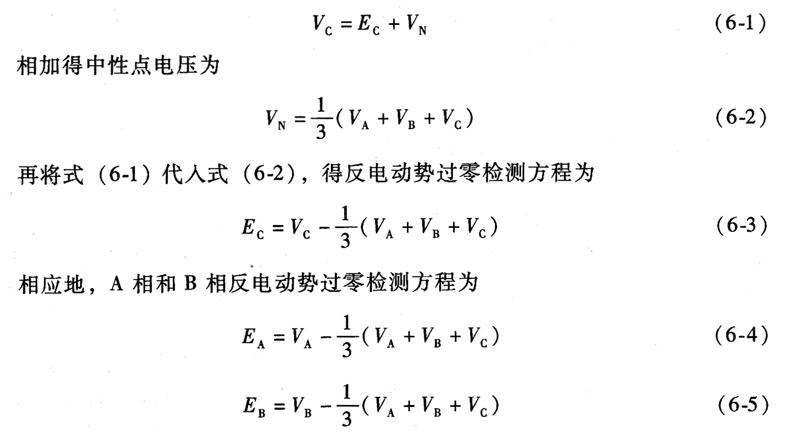
電機(jī)電壓可以用一個(gè)由電阻、電動(dòng)和電感三個(gè)分量組成的方程表示。
公式1

電阻分量(Rwindings)在確定預(yù)期的堵轉(zhuǎn)電流方面起著很大的作用。當(dāng)電機(jī)不旋轉(zhuǎn)時(shí),唯一限制電流的是繞組電阻。
當(dāng)應(yīng)用PWM信號(hào)時(shí),電機(jī)(Lwindings)的電感被利用。當(dāng)設(shè)置PWM頻率時(shí),電感會(huì)產(chǎn)生恒定或平滑相位的電流,以便電感在PWM關(guān)閉期間支持繞組中的電流。
BEMF是當(dāng)永磁電樞在定子內(nèi)部(或周?chē)┬D(zhuǎn)時(shí),電機(jī)產(chǎn)生的電壓。當(dāng)轉(zhuǎn)子旋轉(zhuǎn)時(shí),繞組會(huì)經(jīng)歷一個(gè)變化的磁場(chǎng),這種變化的磁場(chǎng)會(huì)產(chǎn)生與變化磁場(chǎng)速度直接相關(guān)的BEMF電壓。
電機(jī)中有兩個(gè)普遍的概念總是正確的。第一個(gè)是BEMF與電樞速度成正比,實(shí)際上,沒(méi)有其他任何概念。反電動(dòng)勢(shì)方程很清楚地說(shuō)明了這一點(diǎn):
公式2

其中:
- N是線圈匝數(shù)
- B代表磁場(chǎng)
- A是電機(jī)磁場(chǎng)包圍的區(qū)域面積
- ω是角速度
請(qǐng)注意,N、B和A都是特定于電動(dòng)機(jī)結(jié)構(gòu)的常數(shù)。它們不會(huì)改變。最終結(jié)果是反電動(dòng)勢(shì)(EMF)與電機(jī)速度(ω)成正比。
下一個(gè)通用概念是電機(jī)轉(zhuǎn)矩和電機(jī)電流之間的關(guān)系。同樣,方程式清楚地描述了這一點(diǎn):
公式3

其中:
- N是線圈匝數(shù)
- P是極數(shù)
- θ是磁通量
再次注意電流(I)和轉(zhuǎn)矩(T)是成正比的。還有其他影響電流的因素,如銅的溫度和電阻率。銅電阻率提高了轉(zhuǎn)矩電勢(shì)(冷態(tài))或限制了轉(zhuǎn)矩電勢(shì)差(熱態(tài)),但不會(huì)改變轉(zhuǎn)矩與電流的關(guān)系。
2.1 適用于步進(jìn)電機(jī)的通用電機(jī)概念
步進(jìn)電機(jī)通常是恒流驅(qū)動(dòng)系統(tǒng)(譯者注:原文是A stepper motor is typically a fixed current system.)。如果進(jìn)入電機(jī)的固定電流產(chǎn)生固定扭矩,則步進(jìn)電機(jī)如何在固定驅(qū)動(dòng)電流、固定轉(zhuǎn)速的情況下,適應(yīng)各種負(fù)載和扭矩?答案是,自動(dòng)調(diào)整反電動(dòng)勢(shì)相對(duì)于驅(qū)動(dòng)電流的相位。
電流根據(jù)前面的方程產(chǎn)生扭矩。施加扭矩的方向取決于外部負(fù)載。對(duì)于輕負(fù)載步進(jìn)電機(jī),電機(jī)轉(zhuǎn)矩僅有一小部分用于驅(qū)動(dòng)負(fù)載,而很大一部分用于降低電機(jī)轉(zhuǎn)速。為了永遠(yuǎn)不超過(guò)指令轉(zhuǎn)速,電流首先驅(qū)動(dòng)電機(jī)加速,然后制動(dòng)電機(jī)減速。對(duì)于空載電機(jī),輸出軸輸出的總扭矩為零。
轉(zhuǎn)子位置也是轉(zhuǎn)子磁場(chǎng)相對(duì)于定子磁場(chǎng)的位置指示。轉(zhuǎn)子磁場(chǎng)固定在轉(zhuǎn)子上,并隨轉(zhuǎn)子旋轉(zhuǎn)。定子磁場(chǎng)與定子中的電流有關(guān)。“正”電流產(chǎn)生“正”磁場(chǎng),反之亦然。

圖3 無(wú)負(fù)載電機(jī)的BEMF相位移動(dòng)
電機(jī)加載時(shí),反電動(dòng)勢(shì)移動(dòng),將更多扭矩轉(zhuǎn)換為向前運(yùn)動(dòng)。

圖 4 部分負(fù)載電機(jī)的BEMF相移
在部分負(fù)載的電機(jī)中,反電動(dòng)勢(shì)發(fā)生了變化,以增加驅(qū)動(dòng)轉(zhuǎn)矩占制動(dòng)轉(zhuǎn)矩的百分比。隨著外部載荷的增加,這種變化會(huì)繼續(xù),直到載荷超過(guò)潛在扭矩能力。此時(shí),電氣旋轉(zhuǎn)和機(jī)械旋轉(zhuǎn)之間的同步停止,將會(huì)造成電機(jī)堵轉(zhuǎn)。
下圖中,在滿載電機(jī)中,扭矩需求增加,在反電動(dòng)勢(shì)進(jìn)一步移動(dòng)的瞬間,輸出扭矩減小,最后電機(jī)停止旋轉(zhuǎn)。

圖5 滿負(fù)載電機(jī)的BEMF相移
上圖中注意到:注意電流和BEMF的完全對(duì)齊(譯者注:指的是相位相同)。
3 LP9942堵轉(zhuǎn)檢測(cè)方法
3.1 電流檢測(cè)
L9942具有通過(guò)查看電機(jī)電流上升時(shí)間來(lái)檢測(cè)堵轉(zhuǎn)的功能。
堵轉(zhuǎn)期間,由于沒(méi)有BEMF,電機(jī)電流升高。缺乏BEMF會(huì)產(chǎn)生兩種影響。首先,反電動(dòng)勢(shì)缺失會(huì)導(dǎo)致電機(jī)相電阻兩端的電壓變大,最終導(dǎo)致電機(jī)繞組中的電流增大(譯者注:原文為it increases the potential current in a winding at a given voltage per Ohm's law)。其次,它增加了繞組電流的變化率,因?yàn)殡姼兄须娏鞯淖兓俾逝c電感兩端的電壓成正比。在電機(jī)繞組中只有很少或沒(méi)有BEMF時(shí),電流會(huì)快速上升。

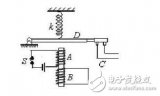
圖 6 典型的電機(jī)相繞組部件
然而,L9942通過(guò)在達(dá)到預(yù)編程電流閾值時(shí)關(guān)閉相位來(lái)調(diào)節(jié)電機(jī)相電流。因此,當(dāng)電機(jī)堵轉(zhuǎn)時(shí),電機(jī)電流不會(huì)產(chǎn)生尖峰電流(譯者注:尖峰電流指的是spike)。當(dāng)電流控制算法補(bǔ)償BEMF的損失時(shí),占空比減小到相當(dāng)小的值。因此,L9942通過(guò)觀察并報(bào)告給定指令電流的異常低占空比來(lái)檢測(cè)BEMF的損失。
這種方法的困難在于,有許多與電機(jī)電流相關(guān)的參數(shù)可以在步進(jìn)電機(jī)的正常工作空間內(nèi)移動(dòng)。溫度、電池電壓、負(fù)載或扭矩等因素會(huì)對(duì)電流調(diào)節(jié)占空比產(chǎn)生重大影響。不幸的是,正常光譜一端的工作點(diǎn)可能看起來(lái)像另一端的堵轉(zhuǎn)電機(jī)(譯者注:原文是:Unfortunately, the operating point at one end of the normal spectrum can look like a stalled motor at the other end. 沒(méi)有弄懂要表達(dá)什么意思)。這些重疊的參數(shù)使得通過(guò)電流占空比來(lái)檢測(cè)堵的方法測(cè)變得不可靠。
為了最小化電機(jī)電阻、電池電壓和溫度的影響,堵轉(zhuǎn)檢測(cè)算法可以直接查看BEMF。
3.2 BEMP檢測(cè)說(shuō)明
通過(guò)對(duì)比非堵轉(zhuǎn)操作期間的一個(gè)步進(jìn)電機(jī)相位的線圈電流和感應(yīng)BEMF電壓,可以看出電流和BEMF壓力之間存在90°的相位差。

圖7 反電動(dòng)勢(shì)和相電流
BEMF堵轉(zhuǎn)檢測(cè)算法利用了這一現(xiàn)象。當(dāng)電機(jī)電流從一個(gè)極性過(guò)渡到另一個(gè)極時(shí),有一步的電流通常設(shè)置為0A。因此,當(dāng)階躍電流為零時(shí),檢查BEMF不會(huì)干擾電機(jī)的控制。

圖8 主動(dòng)步進(jìn)電機(jī)上的反電動(dòng)勢(shì)波形
在電流為零或接近零的空載電機(jī)繞組中,BEMF最強(qiáng)。
當(dāng)您考慮電機(jī)負(fù)載對(duì)BEMF相位的影響時(shí),就會(huì)出現(xiàn)問(wèn)題。由于此算法僅在相位未驅(qū)動(dòng)時(shí)查找BEMF,因此“查找”窗口非常短。當(dāng)電機(jī)加載時(shí),BEMF移動(dòng),使其更符合驅(qū)動(dòng)電壓/電流。因此,電機(jī)負(fù)載給BEMF檢測(cè)增加了一些變化。堵轉(zhuǎn)邊緣的滿載電機(jī)看起來(lái)與完全堵轉(zhuǎn)的電機(jī)相同。幸運(yùn)的是,步進(jìn)電機(jī)不打算用那么多負(fù)載驅(qū)動(dòng)。
3.2.1步進(jìn)電機(jī)上的BEMF
為了更容易地看到轉(zhuǎn)矩對(duì)反電動(dòng)勢(shì)的影響,以下是一個(gè)以全步進(jìn)模式驅(qū)動(dòng)的電機(jī)。下圖9顯示了在全步進(jìn)模式下驅(qū)動(dòng)的空載電機(jī)。紅色是電流,紫色是相位上的電壓。細(xì)黑線估計(jì)反電動(dòng)勢(shì)。

圖9 以全步進(jìn)模式驅(qū)動(dòng)的空載電機(jī)
在空載電機(jī)中(圖9),反電動(dòng)勢(shì)引導(dǎo)相電流。這表明旋轉(zhuǎn)磁場(chǎng)提供的能量比保持轉(zhuǎn)子旋轉(zhuǎn)所需的能量更多。反電動(dòng)勢(shì)電壓的不規(guī)則形狀表明在360°循環(huán)中存在旋轉(zhuǎn)加速和減速。
在負(fù)載水平較高的電機(jī)中(圖10),反電動(dòng)勢(shì)信號(hào)與實(shí)際驅(qū)動(dòng)器信號(hào)更加一致。換句話說(shuō),原因和結(jié)果之間的相位差較小。如果負(fù)載增加到一定水平以上,則在驅(qū)動(dòng)電機(jī)時(shí)可能會(huì)出現(xiàn)階躍損耗。

圖10 以全步進(jìn)模式驅(qū)動(dòng)的負(fù)載電機(jī)
使用步進(jìn)電機(jī)的系統(tǒng)會(huì)大幅度過(guò)驅(qū)動(dòng)電機(jī)(譯者注:這里指的是在額定電流下,驅(qū)動(dòng)電流對(duì)應(yīng)的轉(zhuǎn)矩要大于負(fù)載,且要留有較大余量),以確保在所有正常操作條件下不會(huì)堵轉(zhuǎn)。
3.2.2 堵轉(zhuǎn)電機(jī)上的BEMF
將圖9和圖10與堵轉(zhuǎn)轉(zhuǎn)子波形(圖11)進(jìn)行比較,說(shuō)明堵轉(zhuǎn)電機(jī)和運(yùn)行電機(jī)之間的差異。同樣,這些數(shù)字是使用全步進(jìn)電機(jī)完成的,以更好地說(shuō)明這些條件下的BEMF。

圖11 硬堵轉(zhuǎn)模式下的電機(jī)
圖11顯示了在非驅(qū)動(dòng)間隔期間幾乎沒(méi)有反電動(dòng)勢(shì)。這是可以理解的,因?yàn)锽EMF是轉(zhuǎn)子運(yùn)動(dòng)的直接結(jié)果。如果堵轉(zhuǎn)轉(zhuǎn)子中有一些移動(dòng),則可以看到BEMF(圖12)。圖12顯示了“松散”堵轉(zhuǎn)電機(jī)中BEMF的不規(guī)則性質(zhì)。

圖 12 電機(jī)堵轉(zhuǎn)但允許“振動(dòng)”的兩種情況
將這些波形與之前的運(yùn)行波形進(jìn)行比較,我們可以看到有些重疊。當(dāng)然,圖12顯示了全步進(jìn)模式驅(qū)動(dòng)電機(jī)的行為。
4 BEMF檢測(cè)的統(tǒng)計(jì)學(xué)分析
以下簡(jiǎn)化框圖(圖13)說(shuō)明了微步進(jìn)模式下給定電機(jī)的BEMF檢測(cè)系統(tǒng)。該系統(tǒng)與步進(jìn)電機(jī)相位同步檢查BEMF。

圖 13 反電勢(shì)檢測(cè)電路的簡(jiǎn)化框圖
通過(guò)微處理器模擬數(shù)字采樣,可以在短時(shí)間內(nèi)獲得數(shù)千個(gè)BEMF讀數(shù)。根據(jù)該信息生成了值的直方圖。這提供了對(duì)預(yù)期的理解。
對(duì)于以下直方圖,如圖所示,使用了L9942和8位微控制器。L9942的步進(jìn)時(shí)鐘頻率設(shè)置為2 kHz,微步進(jìn)模式下的峰值電流設(shè)置為400 mA。
每個(gè)ADC樣本都是在零電流步驟結(jié)束時(shí)采集的。這確保了最一致的BEMF讀數(shù)。

圖14 20℃下空載電機(jī)的BEMF直方圖
其中:
- 檢測(cè)到的最小BEMF電壓=3.6 V
- 檢測(cè)到的最大BEMF電壓=6.6 V
- 平均檢測(cè)到的BEMF電壓=4.7278 V
- 標(biāo)準(zhǔn)偏差=0.2007 V
現(xiàn)在比較堵轉(zhuǎn)轉(zhuǎn)子BEMF和運(yùn)行中的BEMF。

圖15 空載和堵轉(zhuǎn)電機(jī)在熱態(tài)和冷態(tài)下的組合直方圖
從圖中可以看出,有些情況下,堵轉(zhuǎn)轉(zhuǎn)子的BEMF與運(yùn)行的BEMF值重疊。這只是由于轉(zhuǎn)子振動(dòng)導(dǎo)致BEMF高于零。從統(tǒng)計(jì)數(shù)據(jù)來(lái)看,這種重疊是最小的,因?yàn)榇蠖鄶?shù)情況下,BEMF比平時(shí)低得多。
在這個(gè)例子中,BEMF閾值被設(shè)置為大約2 V。由于絕大多數(shù)堵轉(zhuǎn)轉(zhuǎn)子的BEMF測(cè)量值都遠(yuǎn)低于這個(gè)水平,因此使用該閾值可以進(jìn)行可靠的檢測(cè)。如果您查看有效檢測(cè)此電機(jī)堵轉(zhuǎn)所需的時(shí)間,我們發(fā)現(xiàn)獨(dú)鉆可以在電機(jī)的一個(gè)機(jī)械旋轉(zhuǎn)內(nèi)檢測(cè)到。

圖16 一臺(tái)電機(jī)堵轉(zhuǎn)檢測(cè)時(shí)間直方圖(右側(cè)是左側(cè)的縮放比例)
“電流周期”是指進(jìn)行一次360°電旋轉(zhuǎn)的持續(xù)時(shí)間。在本例中,轉(zhuǎn)換為以2 kHz或16 ms的頻率步進(jìn)32次。在10個(gè)半周期或80 ms內(nèi),100%的時(shí)間檢測(cè)到堵轉(zhuǎn)。
5 限制
這些情況比較了空載電機(jī)和堵轉(zhuǎn)電機(jī)。這兩種狀態(tài)之間的差異是顯著的,并且很容易察覺(jué)。從上述分析中,我們可以看到,當(dāng)BEMF移動(dòng)與電流更加一致時(shí),負(fù)載電機(jī)會(huì)導(dǎo)致檢測(cè)到的BEMF閾值下降。在考慮可接受的堵轉(zhuǎn)閾值時(shí),必須考慮這種下降。對(duì)于每個(gè)應(yīng)用,都有一個(gè)應(yīng)用的最大預(yù)期扭矩要求。在確定BEMF堵轉(zhuǎn)閾值時(shí),必須考慮該最大扭矩要求。
其他可能限制這種方法的因素包括傳動(dòng)裝置松動(dòng)或松軟,或轉(zhuǎn)子“彈跳”的“軟”堵轉(zhuǎn)。在當(dāng)前占空比方法中,這些限制更難克服。由于BEMF檢測(cè)是在IC外部進(jìn)行的,因此可以通過(guò)識(shí)別堵轉(zhuǎn)閾值的統(tǒng)計(jì)方法在一定程度上克服這一限制。
6 總結(jié)
用于檢測(cè)堵轉(zhuǎn)的BEMF方法可靠且經(jīng)濟(jì)高效。該方法使用隨時(shí)間或溫度變化很小的電機(jī)參數(shù)。因此,它克服了更傳統(tǒng)的電流/占空比檢測(cè)堵轉(zhuǎn)檢測(cè)方法中的許多限制。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論