在選型1FK7伺服電機時,對旋變編碼器,看得模糊SIZER區(qū)分有多極旋變、單極旋變、14位旋變、15位旋變,在一般常識中,知道有多極、單極之分,但14/15位是是否也是單極或多極的分支?即不分單極或多極,最終分辨率就是14位、15位?
性價比上,這些旋變,哪款高些?
2023-11-16 06:14:31
最近在用AD2S1210來測試旋變的時候遇到一個問題:示波器探針夾cos,示波器黑夾子夾coslo,在一段時間內(nèi)會出現(xiàn)一個畸形波,同時測到EXC引腳也有畸形波輸出,如圖片和附件所示,但晶振方面
2016-07-21 21:35:31
各位大神,旋變解碼電路請教一下,我用的是AD1200,調(diào)試的時候發(fā)現(xiàn)不同批次的AD1200,通電后會出現(xiàn)DOS燈亮,最終旋變報警
2020-02-22 11:26:10
如果旋變輸出的波形不接AD2S1200,輸出的正旋差分信號是完全符合AD2S1200的輸入的,直接接示波器波形如下圖1:
圖1 旋變輸出的信號直接接示波器
圖2 旋變輸出的sin
2023-12-21 06:48:46
你好,在使用貴公司的旋變數(shù)字轉(zhuǎn)換器AD2S80A時遇到旋變輸出信號與參考信號相移問題,查詢手冊發(fā)現(xiàn)疑問,請求解答和幫助。先說一下現(xiàn)象: 我使用的位置傳感器為雙通道的正余弦旋轉(zhuǎn)變壓器,指標為:勵磁為
2019-02-28 13:37:06
電機控制之旋變及位置反饋解決方案篇其它話題的熱門問答請前往總貼查看。http://www.deyisupport.com/question_answer/microcontrollers/c2000
2020-05-20 09:33:31
在測試并行輸出時,我以上圖紅線所示的時序,想連續(xù)的讀出旋變的位置數(shù)據(jù),為什么每次讀出的只是一個值,不隨旋變轉(zhuǎn)子的變化而變化,只有將RD拉高再拉低時才會輸出下一個位置數(shù)據(jù)?
2023-12-22 06:17:29
控制器正在調(diào)試,急急急!!!使用AD2S1205旋變芯片,控制器調(diào)試過程中電機正常運行中,突然報DOS故障并且此故障鎖存至低電平,經(jīng)查看DATASHEET,為正余弦失配,但是電機還能正常運轉(zhuǎn)。問題1
2018-08-09 06:15:36
急急急!!!使用AD2S1205旋變芯片,控制器調(diào)試過程中電機正常運行中,突然報DOS故障并且此故障鎖存至低電平,經(jīng)查看DATASHEET,為正余弦失配,但是電機還能正常運轉(zhuǎn),請問如何消除此故障?如果不消除會影響正常運行嗎?正余弦電路如下謝謝大家,提供寶貴建議或意見。
2019-02-13 14:20:44
,第一張圖是SIN和地之間的電壓信號第二張是旋變輸出來的SIN與SINLO的電壓信號第三張是旋變濾波后的電壓信號這里我給電機沒有通電,只將電機上的旋變和AD2S1205進行了連接@
2019-01-25 08:34:14
只給AD2S1205那個板子上電,得到的旋變的激勵信號是正確的(此時沒有與旋變連接),此后與旋變連接上電,得到的激勵信號就是很大的錯誤,也沒有旋變輸出的信號SIN/SINLO/COS/COSLO,在
2023-12-08 08:25:05
使用AD2S1205采集多摩川旋變TS2640N321E64的位置數(shù)據(jù)時,范圍為0-4096,勻速旋轉(zhuǎn)旋變,0-1023位置信息均勻,然后會突然從1023跳變到3071,此時旋變只是旋轉(zhuǎn)了很小的一個角度,再繼續(xù)旋轉(zhuǎn)旋變,位置從3072到4096均勻變化,請問為什么會出現(xiàn)這樣的問題呢?
2020-11-27 11:27:50
您好,在與旋變匹配時,LOS、DOS未出現(xiàn)故障,但是LOT周期性出現(xiàn)故障信號?請問LOT故障具體由什么原因產(chǎn)生?有什么解決方案?
2023-12-15 07:13:29
AD2S1205旋變芯片,單板測試,未接入旋變時,AD2S1205的增量式編碼器輸出A/B就有信號了,而且方波頻率在幾K到十幾K之間,這是什么原因造成的?
2023-12-12 06:22:53
AD2S1205旋變芯片,單板測試,未接入旋變時,AD2S1205的增量式編碼器輸出A/B就有信號了,而且方波頻率在幾K到十幾K之間,這是什么原因造成的?
2018-08-07 08:44:22
使用AD2S1210解碼旋變測電機的角度和位置。使用過程中發(fā)現(xiàn)當電機的驅(qū)動電壓增大,但是轉(zhuǎn)速較低時,讀得的旋變角度信號會不定時的出現(xiàn)錯誤,導致電機控制震蕩。但是如果是同樣的驅(qū)動電壓,電機轉(zhuǎn)速較高
2018-11-14 09:19:05
我購買了一塊AD2S1210的評估板和轉(zhuǎn)接板,用來解碼多摩川的旋變。如下圖所示,旋變還沒有裝到電機上,但是足夠讀取原副邊線圈的正余弦波形。
現(xiàn)在通過上位機設置,激勵正弦信號是10kHz
2023-12-04 06:41:31
如題:最近做一個項目 用到AD2S1210, 現(xiàn)在指示有故障,而且輸出的位置數(shù)據(jù)為實際電機的兩倍,這個現(xiàn)象是故障造成的還是旋轉(zhuǎn)變壓器的極對數(shù)高出一倍下圖是電機線反電勢波形和旋變SIN波形 ,這個圖能不能看出是旋變極對數(shù)的問題
2018-09-14 14:23:54
看一下,波形是好的。
問題1:可以看到旋變的位置跳變是有一定規(guī)律的,但又不是電機的一圈,已經(jīng)轉(zhuǎn)了多圈,雖然我懷疑是旋變安裝問題,但是示波器沒有抓到對應波形,還有沒有其他方法能確定是旋變
2023-12-07 07:17:27
我最近一個項目上用到AD2S1210去解碼旋變信號,但發(fā)現(xiàn)上電沒有激磁信號(沒有工作),沒有晶振信號。但是,一上電就有40mA(5V),而且 MCU的SDO,SDI,CLK, CS, SAMPLE
2019-01-22 09:03:27
用評估板EVAL-AD2S1210EDZ 采集旋變信息,旋變型號為多摩川TS2640N320E64,評估板連接自己做的DSP板,然后DSP與PC機通過串口連接,DSP通過并口訪問控制AD2S1210
2018-10-12 09:12:51
or /exc信號為:
R1/R2信號為:
處理后的 sin/sinlO信號為:
信號值滿足閾值要求,但是仍發(fā)生信號降級。
問題:1,請問信號降級的情況下,旋變解碼芯片能否正常工作?2.如果不能正常工作,請問該如何改正呢?
還望各位前輩不吝賜教。
非常感謝!~
2023-12-04 07:27:19
STM32控制電調(diào)驅(qū)動兩個無刷電機,四旋翼對軸平衡調(diào)試。
2018-07-14 11:03:01
上圖是新能源旋變器的轉(zhuǎn)子和定子示意圖,極對數(shù)是4、勵磁電壓有效值是7V、勵磁頻率10KHz、輸出電壓有效值2+-10%、相位移15°、變比等于輸出電壓有效值/勵磁電壓有效值,即2V/7V
2021-09-06 10:47:34
于汽車和工業(yè)應用中,用來提供電機軸位置和速度的反饋信息。AD2S1210是一款完整的10位至16位分辨率RDC,片內(nèi)集成了可編程正旋波振蕩器,為旋變器提供激勵信號。由于工作環(huán)境惡劣,AD2S1210
2021-05-21 21:46:25
大家下午好!今天給大家?guī)怼?b class="flag-6" style="color: red">旋變驅(qū)動電路OCL電路避免交越失真設計】講解視頻,我們會持續(xù)更新,有問題可以留言一同交流討論。上期回顧:如何避免OCL電路交越失真設計
2021-12-13 18:02:03
目錄四旋翼構型簡單力學分析什么是歐拉角幾個自由度螺旋槳空心杯電機脈沖寬度調(diào)制(PWM)技術控制初探Visio,CAD和Solidworks畫圖是在太累了,接下來我會主要使用手繪來配圖,大家理解一下哈
2021-07-06 06:39:15
最近做項目發(fā)現(xiàn)一個問題,旋變解碼電路按照adi官方提供的參考電路也一直正常使用無問題,最近客戶拿過來一個電機讓匹配接上后發(fā)現(xiàn)經(jīng)常報位置跟蹤丟失的故障,檢查后發(fā)現(xiàn)反饋的信號濾波器后比濾波器前滯后了幾度
2023-12-12 06:38:58
最近做項目發(fā)現(xiàn)一個問題,旋變解碼電路按照adi官方提供的參考電路也一直正常使用無問題,最近客戶拿過來一個電機讓匹配接上后發(fā)現(xiàn)經(jīng)常報位置跟蹤丟失的故障,檢查后發(fā)現(xiàn)反饋的信號濾波器后比濾波器前滯后了幾度
2018-08-07 06:00:34
可靠的測量位置、轉(zhuǎn)速傳感器,廣泛應用于工業(yè)驅(qū)動和新能源汽車。通過閱讀本文,您可以了解到:什么是旋變,它是如何工作的,旋變的相關應用和目前市場上存在哪些方案。[/url]圖1 電機驅(qū)動系統(tǒng)的基本框圖1.
2017-08-22 10:16:59
什么是伺服系統(tǒng)?伺服電機的工作原理是什么?交流伺服電機的工作原理是什么?
2021-10-11 08:32:00
我使用AD2S1205進行旋轉(zhuǎn)變壓器的數(shù)據(jù)處理,旋變安裝在電機上
使用的是并行傳輸和模擬的編碼器輸出。
做測試時發(fā)現(xiàn)模擬編碼器輸出的信號有干擾,可能是外界干擾,如圖1所示
圖1
圖中兩路
2023-12-22 07:51:30
使用AD2S1210解碼旋變測電機的角度和位置。使用過程中發(fā)現(xiàn)當電機的驅(qū)動電壓增大,但是轉(zhuǎn)速較低時,讀得的旋變角度信號會不定時的出現(xiàn)錯誤,導致電機控制震蕩。但是如果是同樣的驅(qū)動電壓,電機轉(zhuǎn)速較高
2023-11-27 06:13:00
充電器充滿變燈電路的工作原理是什么?充電器充滿變燈電路的電器指示燈是如何變化顏色的?
2021-10-11 07:51:36
我想問下關于旋變解碼芯片AD2S1210中的reset管腳的配置問題,是必須要加外加電路達到供電時序要求嗎?一直處于高電平狀態(tài)是否能夠正常工作呢?請不吝賜教,謝謝!
2018-08-13 06:27:25
運轉(zhuǎn)速度可劃分:第3章 電動汽車動力系統(tǒng)的工作原理第4章 電機的組成與構造4.1 構造圖4.2 實物圖4.3 旋變傳感器4.4 溫度傳感器?第1章 驅(qū)動電機控制器概述電機(英文:Electric machinery,俗稱“馬達”)是指依據(jù)電磁感應定..
2021-06-30 06:53:47
1)四旋翼安裝四旋翼安裝注意事項注意飛控飛行模式是x飛行,還是+飛行;不同的飛行模式飛控安裝方式不同;注意電機轉(zhuǎn)向;最后安裝漿葉;注意漿葉轉(zhuǎn)向;2)遙控器與飛控設置遙控器與飛控設置注意事項這里以qq
2021-09-02 06:18:01
四旋翼的旋翼對稱分布,4個旋翼處于同一高度水平面上,他們的結(jié)構和半徑都相同。通過改變四個電機的轉(zhuǎn)速就可以實現(xiàn)升力的變化,從而控制飛行器的姿態(tài)和位置。1)當四個電機同時加速或同時減速時,飛行器會垂直
2021-09-13 06:54:55
本人第一次接觸四旋翼,不是很明白,請教各位大神,無刷電機是怎么驅(qū)動的啊,用什么驅(qū)動器? 最好能給我一段驅(qū)動程序,能讓無刷電機轉(zhuǎn)起來的就行,最好能調(diào)節(jié)速度的,謝了!
2013-11-14 18:59:03
飛行器姿態(tài), 又具 有較強抗干擾和環(huán)境 自適應能力的姿態(tài)控制器是微小型四旋翼飛行器飛行控制系統(tǒng)研究的當務之急。 五.四旋翼飛行器的結(jié)構形式和工作原理:1.結(jié)構形式直升機在巧妙使用總距控制和周期變距控制
2013-11-28 09:29:12
旋翼作為飛行的直接動力源,旋翼對稱分布在機體的前后、左右四個方向,四個旋翼處于同一高度平面,且四個旋翼的結(jié)構和半徑都相同,旋翼1 和旋翼3 逆時針旋轉(zhuǎn),旋翼2 和旋翼4 順時針旋轉(zhuǎn),四個電機對稱的安裝
2019-02-18 15:02:22
旋變數(shù)字轉(zhuǎn)換器(RDC)廣泛用于汽車和工業(yè)應用中,用來提供電機軸位置/速度反饋信息。AD2S1210是一款完整的 10 位至 16 位分辨率RDC,片內(nèi)集成可編程正弦波振蕩器,為旋變器提供激勵。由于
2018-10-15 10:39:05
,支架中間空間安放飛行控制計算機和外部設備。結(jié)構形式如圖 1.1所示。2.工作原理 四旋翼飛行器通過調(diào)節(jié)四個電機轉(zhuǎn)速來改變旋翼轉(zhuǎn)速,實現(xiàn)升力的變化,從而控制飛行器的姿態(tài)和位置。四旋翼飛行器是一種六
2016-12-23 23:20:13
四旋翼的工作原理是什么?四旋翼飛行器是由哪些部分組成的?如何去實現(xiàn)一種四旋翼飛行器的設計呢?
2021-11-11 08:01:28
微型電機的工作原理是什么
2021-03-15 07:22:52
飛行原理??四旋翼的結(jié)構組裝有十字模式和X模式之分,兩者的基本原理一致,方向結(jié)構不同,都是通過四個電機的組合狀態(tài)進行控制姿態(tài)飛行,而十字型四旋翼機頭是對準其中一個電機的,X型的四旋翼四個電機在對
2021-07-19 06:34:31
我想做一個四旋翼飛行器,該用什么驅(qū)動器和電機呢?
2016-01-21 15:57:44
和新能源汽車。通過閱讀本文,您可以了解到:什么是旋變,它是如何工作的,旋變的相關應用和目前市場上存在哪些方案。 圖1 電機驅(qū)動系統(tǒng)的基本框圖1. 什么是旋轉(zhuǎn)變壓器?旋轉(zhuǎn)變壓器(Resolver),簡稱
2022-11-14 06:33:47
有刷電機的工作原理是什么?無刷電機的工作原理是什么?有刷電機與無刷電機的性能差異有哪些?
2021-07-21 06:24:27
步進電機的工作原理是什么?伺服電機的工作原理是什么?步進電機與伺服電機有哪些區(qū)別?
2021-09-30 07:56:28
各位大俠:我使用TI例程PMSM3_3,電機為13對級,27槽,角度測量采用旋變,采用吸D軸的方法找到D軸與定子U相的角度差,Ud=0.2,Uq=0,電角度=0,讀取旋變的值為10.1度,將旋變測量
2018-09-17 14:57:34
ad2s1210 傳真: ad2s1210對于旋變輸出信號SIN、原 原 原 意、COS、COslo 上球有如下要求:
相對于agnd 向量的SIN、原意、COS和COslo 上球電壓必須始終在
2023-12-04 07:51:37
。 旋變數(shù)字轉(zhuǎn)換器很多電機控制系統(tǒng)采用可變軸旋轉(zhuǎn)速度工作。為了提供最精確的位置信 息,需使用分辨率靈活的系統(tǒng)。AD2S1210是一款旋變數(shù)字轉(zhuǎn)換器,可即時 改變分辨率。這款轉(zhuǎn)換器提供了一種集成式
2018-10-25 10:03:48
可變耦合變壓器的方式工作,其初級繞組和兩個次級繞組之間的磁耦合量根據(jù)旋轉(zhuǎn)部件(轉(zhuǎn)子)位置而改變;轉(zhuǎn)子通常安裝在電機軸上。旋變器可部署在工業(yè)電機控制、伺服器、機器人、混合動力和全電動汽車中的動力系統(tǒng)單元
2018-10-25 10:16:18
簡介旋變器和機電傳感器可用來精確測量角位置,以可變耦合變壓器的方式工作,其初級繞組和兩個次級繞組之間的磁耦合量根據(jù)旋轉(zhuǎn)部件(轉(zhuǎn)子)位置而改變;轉(zhuǎn)子通常安裝在電機軸上。旋變器可部署在工業(yè)電機控制
2019-10-28 08:00:00
,以可變耦合變壓器的方式工作,其初級繞組和兩個次級繞組之間的磁耦合量根據(jù)旋轉(zhuǎn)部件(轉(zhuǎn)子)位置而改變;轉(zhuǎn)子通常安裝在電機軸上。旋變器可部署在工業(yè)電機控制、伺服器、機器人、混合動力和全電動汽車中的動力系統(tǒng)
2018-10-15 10:26:48
?、整形器、積分器、輔助濾波器?和極限比較檢查單元這些豐富的功能環(huán)節(jié)組合。在目前的伺服控制器應用中,基本上都是采用外部專用的旋變解碼芯片獲得旋變位置信息。相對專用芯片,Delta-Sigma解調(diào)器模塊
2018-12-11 10:56:24
電機的旋變是四根線,沒有sinlo,coslo,那么我在輸入到AD2S1200的時候,sinlo,coslo應該接地還是接什么?sin,cos的幅值是3.6V還是1.8V?
2018-10-09 15:48:54
電機的旋變是四根線,沒有sinlo,coslo,那么我在輸入到AD2S1200的時候,sinlo,coslo應該接地還是接什么?sin,cos的幅值是3.6V還是1.8V?
2023-12-20 06:14:08
只給AD2S1205那個板子上電,得到的旋變的激勵信號是正確的(此時沒有與旋變連接),此后與旋變連接上電,得到的激勵信號就是很大的錯誤,也沒有旋變輸出的信號SIN/SINLO/COS/COSLO,在
2018-07-31 06:14:43
如題:最近做一個項目 用到AD2S1210, 現(xiàn)在指示有故障,而且輸出的位置數(shù)據(jù)為實際電機的兩倍,這個現(xiàn)象是故障造成的還是旋轉(zhuǎn)變壓器的極對數(shù)高出一倍
下圖是電機線反電勢波形和旋變SIN波形 ,這個圖能不能看出是旋變極對數(shù)的問題
2023-12-18 08:14:12
四旋翼電機好像沒辦法裝測速碼盤?請問怎么可以裝呢,?或者請各位大神推薦一個測速的好方法吧,
2019-03-28 05:08:18
請問如何將四旋翼改為雙旋翼,謝謝
2019-04-12 03:12:43
[tr][td]有沒有把旋變集成到主芯片里的片子呢?它的外圍需要什么配置呢?[/td][/tr]
2018-12-13 17:13:04
目前旋變處理芯片,官方是推薦AD2S1210還是1205?選型需要,例如,如果都配置為12位,兩者的性能有差別么?
2018-10-26 09:23:04
步進電機的工作原理
以磁阻式步進電機為例,介紹一下步進電機的工作原理,圖1. 1是磁阻式步進電機工作原理的示意圖。它的定子上有六個
2009-03-30 16:53:04 8424
8424 
磁阻式步進電機的工作原理
以磁阻式步進電機為例,介紹一下步進電機的工作原理,圖1. 1是磁阻式步進電機工作原理的示意圖。它的定
2009-05-06 23:40:184018 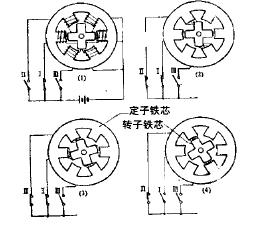
繼步進電機的結(jié)構之后,本文將介紹步進電機的基本工作原理。步進電機的基本工作原理(單相勵磁),下面使用下圖來介紹步進電機的基本工作原理。這是上一篇“步進電機的結(jié)構”中給出的兩相雙極型線圈每一相(一組線圈)的勵磁示例。
2023-02-24 09:51:102621 
同步電機的極數(shù)是啥意思?2極、4極、6極、8極有什么區(qū)別? 同步電機的極數(shù)是指電機中磁極的數(shù)量。常見的同步電機極數(shù)有2極、4極、6極和8極等。 首先,我們來了解一下同步電機的基本結(jié)構和工作原理
2023-12-25 11:32:00830
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論