相機(jī)標(biāo)定中所要確定的幾何模型參數(shù)分為內(nèi)參和外參兩種類型。相機(jī)內(nèi)參的作用是確定相機(jī)從三維空間到二維圖像的投影關(guān)系。相機(jī)外參的作用是確定相機(jī)坐標(biāo)與世界坐標(biāo)系之間相對位置關(guān)系。
2022-10-12 16:04:18 2247
2247 單目相機(jī)標(biāo)定技術(shù)適用于被測表面曲率較小且需要獲取實(shí)際數(shù)據(jù)的應(yīng)用場合,比如食品、機(jī)械制造以及半導(dǎo)體等。
2023-07-21 11:32:272358 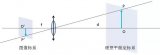
Halcon旋轉(zhuǎn)標(biāo)定固定相機(jī),從下往上拍照,計(jì)算產(chǎn)品到標(biāo)準(zhǔn)位置的偏差,如果產(chǎn)品有角度偏差,那就要額外減去旋轉(zhuǎn)產(chǎn)生的X、Y偏移,都說取點(diǎn)擬合圓,圓心就是旋轉(zhuǎn)中心點(diǎn),可是我擬合出來的圓心轉(zhuǎn)換成機(jī)器人
2021-11-09 15:36:24
幾篇張正友標(biāo)定方法的英文原文,不少朋友看過張正友標(biāo)定方法,這里提供他的英文原文。喜歡看英文文獻(xiàn)的,以及愿意更深入理解matlab中相機(jī)標(biāo)定工具箱的朋友可以參考。
2018-05-04 14:43:25
這里相機(jī)標(biāo)定主要內(nèi)容包括:圖像的采集、相機(jī)參數(shù)獲取、TOOLBOX_calib可視化描述一、相機(jī)標(biāo)定感謝博主的代碼分享,這里主要參考了一些(https://download.csdn.net
2021-08-18 07:24:03
相機(jī)包帶加厚肩帶 攝影包相機(jī)包電腦包減壓彈力單肩帶 背帶金屬扣
2023-03-28 13:03:52
DCS集散控制系統(tǒng)時(shí)鐘同步有何意義?DCS系統(tǒng)現(xiàn)場時(shí)鐘同步有哪些應(yīng)用?
2021-09-30 08:45:48
``【課程推薦】龍哥手把手教你學(xué)LabVIEW機(jī)器視覺設(shè)計(jì)教程請問哪位大神有Labview機(jī)器視覺相機(jī)標(biāo)定的程序文件,麻煩分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
STM32F407看門狗有何意義?STM32F407看門狗有何功能?
2021-09-24 06:55:09
相機(jī)標(biāo)定不成功點(diǎn)擊下一步?jīng)]反應(yīng)
2015-04-16 12:58:59
labview標(biāo)定圖片不成功 點(diǎn)擊下一步?jīng)]反應(yīng)
2015-04-16 12:57:25
最近在做視覺,需要用labview做相機(jī)的標(biāo)定,通過空間轉(zhuǎn)換確定空間位置。視覺助手的標(biāo)定只能標(biāo)定內(nèi)參數(shù),沒有辦法做內(nèi)外參數(shù)的標(biāo)定,哪位大神給指導(dǎo)指導(dǎo)如何做一個(gè)標(biāo)準(zhǔn)的標(biāo)定程序。
2017-04-24 16:08:44
labview進(jìn)行物體測量如何使用標(biāo)定塊進(jìn)行標(biāo)定?
2019-08-04 12:18:01
是左右相機(jī)拍攝同一塊圓形標(biāo)定板的圖像,并根據(jù)labview自帶的圓點(diǎn)標(biāo)定板圓點(diǎn)檢測函數(shù)得到圓點(diǎn)坐標(biāo)。下圖是加載圓點(diǎn)標(biāo)定板標(biāo)定結(jié)果后,加載一對圖像后,鼠標(biāo)移動到左圖上顯示的距離信息。程序框圖分3部分
2021-09-27 16:52:18
主要內(nèi)容本文提出了一種不依賴于棋盤格等輔助標(biāo)定物體,實(shí)現(xiàn)像素級相機(jī)和激光雷達(dá)自動標(biāo)定的方法。方法直接從點(diǎn)云中提取3D邊特征,一避免遮擋問題,并且使用了精確度更高的深度連續(xù)邊。文中首先指出:以下四種
2021-09-01 07:42:19
傳感器使用前要進(jìn)行標(biāo)定, 標(biāo)定時(shí)必定需要進(jìn)行曲線擬合。若用計(jì)算機(jī)處理很簡單, 但實(shí)際中用微控制器中標(biāo)定時(shí), 只能進(jìn)行一般的代數(shù)運(yùn)算,無矩陣運(yùn)算, 處理就顯得非常不方便。最小二乘法推導(dǎo)了二次多項(xiàng)式
2021-08-17 08:14:20
單元換算到實(shí)際單位時(shí)的大小,然后根據(jù)像素坐標(biāo)計(jì)算實(shí)際坐標(biāo),那么如果我用相似三角形的原理的話,是不是可以結(jié)合它來使用而不進(jìn)行相機(jī)標(biāo)定求各位迷惑的和搞清楚的人都說一下你們的見解!!謝謝!!
2016-05-20 15:49:27
雙層屏蔽有何意義?
2021-05-27 06:27:29
基于嵌入式計(jì)算平臺去設(shè)計(jì)虛擬儀器系統(tǒng)有何意義?
2021-04-09 07:08:26
`基地址已經(jīng)可以區(qū)分了,加一個(gè)相同的偏移地址有何意義?`
2021-02-02 13:55:11
小白求助,求相機(jī)標(biāo)定示例
2021-11-22 07:43:41
現(xiàn)在有一款相機(jī)配合遠(yuǎn)心鏡頭使用,產(chǎn)品比較小,比較精密,視野也很小,差不多也就1厘米吧,像這種情況一般怎么進(jìn)行標(biāo)定,是用那種比較精密的標(biāo)定板嗎?還有別的辦法嗎?論壇有視覺大神答疑解惑嗎?
2020-01-03 16:58:31
慣量是什么意思?慣量有什么作用?有何意義?伺服電機(jī)選型時(shí),為什么要慣量匹配?
2021-06-28 09:11:33
斷路器符號的含義是什么?斷路器用什么電路符號表示?斷路器符號有何意義?
2021-07-11 07:46:13
晶體管的電參數(shù)可分為哪幾種?晶體管的電參數(shù)在實(shí)際使用中有何意義?
2021-06-08 06:11:12
lidar_camera_calibration項(xiàng)目——激光雷達(dá)和相機(jī)聯(lián)合標(biāo)定
2019-04-12 09:27:38
說到物聯(lián)網(wǎng)生物識別技術(shù)大家感覺脫離我們的日常生活,本文帶大家近距離了解物聯(lián)網(wǎng)生物識別技術(shù)究竟有何意義?各位工程師讀完此文心里就清楚多了!
2020-10-21 09:57:27
研究保險(xiǎn)絲的溫升有何意義?深圳市松美健電子實(shí)業(yè)有限公司專員回答:保險(xiǎn)絲的溫升主要是指保險(xiǎn)絲中在流過1.1倍率(110%)的額定電流的時(shí)候,保險(xiǎn)絲的溫度上升值。也就是實(shí)際測得的溫度減去環(huán)境溫度的值
2017-05-15 10:04:58
有個(gè)項(xiàng)目要用視覺定位,視覺拍好產(chǎn)品之后,把產(chǎn)品的坐標(biāo)發(fā)送到PLC,PLC再執(zhí)行定位指令。現(xiàn)在查到的資料都沒有涉及這一塊,都是講相機(jī)標(biāo)定,而不是手眼標(biāo)定。哪位有這方面的資料,怎么用labview實(shí)現(xiàn)手眼標(biāo)定?
2020-05-28 14:42:35
整個(gè)結(jié)構(gòu)只有上面的電阻和電容,該運(yùn)放不需要平衡電阻。最大的困惑是在2腳前沒有電阻形成固定增益,該電路輸出等于電源電壓,增益無窮大,這樣有何意義?
2016-10-07 17:26:33
整個(gè)結(jié)構(gòu)只有上面的電阻和電容,該運(yùn)放不需要平衡電阻。最大的困惑是在2腳前沒有電阻形成固定增益,該電路輸出等于電源電壓,增益無窮大,這樣有何意義?
2016-10-07 17:24:51
提出一種無相機(jī)標(biāo)定的立體圖像對的極線校正新方法。該校正方法并不依賴基本矩陣F的精確求解,而是通過空間變換法分析校正前后圖像點(diǎn)對應(yīng)關(guān)系,依此分解并參數(shù)化描述極線變
2009-04-14 08:40:01 12
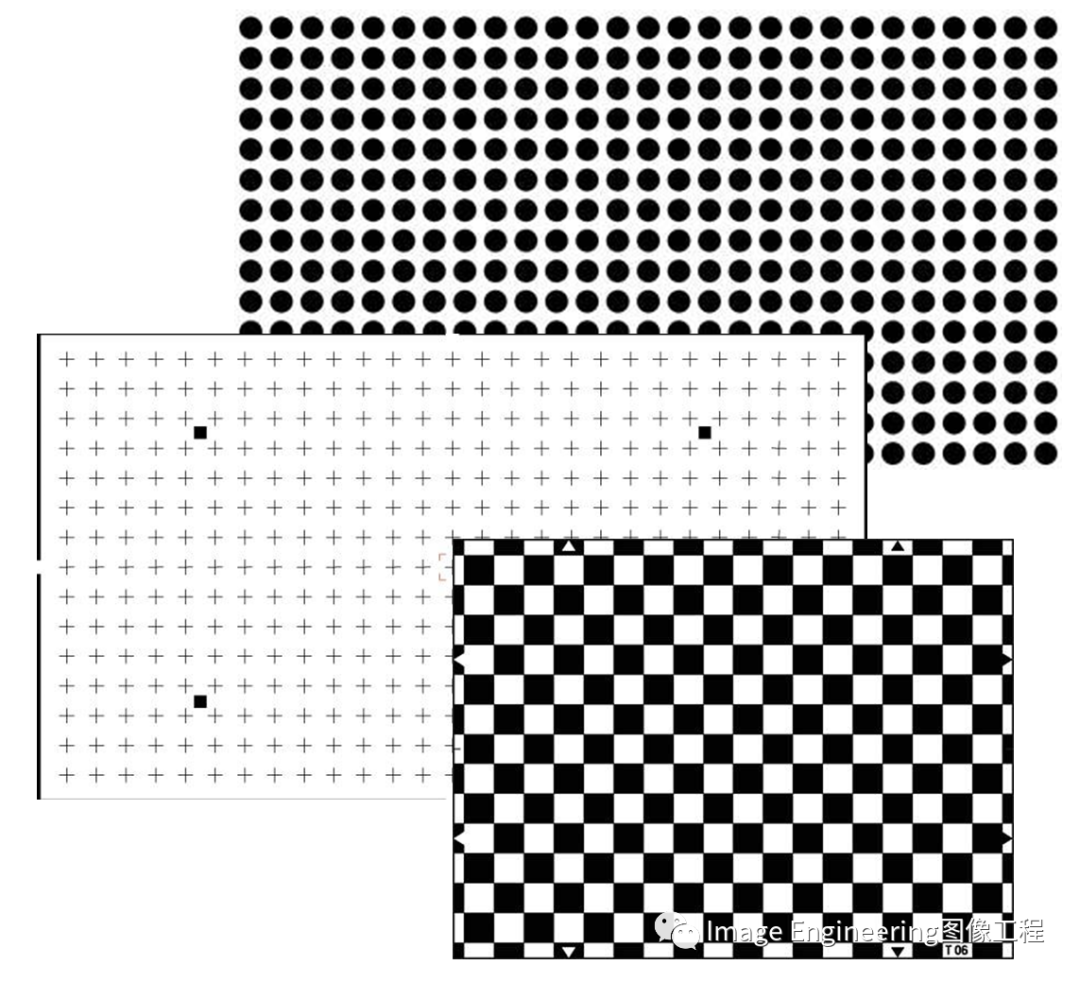
12 光學(xué)標(biāo)定板應(yīng)用領(lǐng)域宏誠光學(xué)玻璃系列標(biāo)定板和陶瓷系列標(biāo)定板是專為高校實(shí)驗(yàn)、研究單位項(xiàng)目研發(fā)和機(jī)器視覺集成商產(chǎn)品標(biāo)定等等客戶群體使用的常用標(biāo)定工具,能夠方便獲得相機(jī)的標(biāo)定數(shù)據(jù)。標(biāo)定板作用:為校正鏡頭畸變
2022-09-20 08:14:32
本文提出一種基于圖像輪廓進(jìn)行相機(jī)自標(biāo)定并計(jì)算投影矩陣從而恢復(fù)物體三維模型的方法。首先使用鏡面反射從圖像中獲取物體的多角度成像并利用閾值和邊緣提取得到圖像的輪
2009-12-07 11:53:5019 研究保險(xiǎn)絲的溫升有何意義?
保險(xiǎn)絲的溫升是指保險(xiǎn)絲中流過1.1倍(110%)額定電流時(shí),保險(xiǎn)絲的溫度上升值,即實(shí)測溫度減去環(huán)境溫度的值。UL標(biāo)準(zhǔn)將其上限
2009-11-12 09:14:10976 什么港行相機(jī) 估計(jì)大家的眼睛都為之一亮。說實(shí)話我也是。港行就是香港的行貨,和中國的行貨一樣。質(zhì)量會比大陸的要好。就是有很多是繁體的要涮
2010-01-30 14:10:20408 matrox mil開發(fā)資料:CALIBRATION相機(jī)標(biāo)定模塊
2015-12-10 16:32:068 什么是攝相機(jī)標(biāo)定?攝相機(jī)標(biāo)定方法的分類?感興趣的小伙伴們可以瞧一瞧。
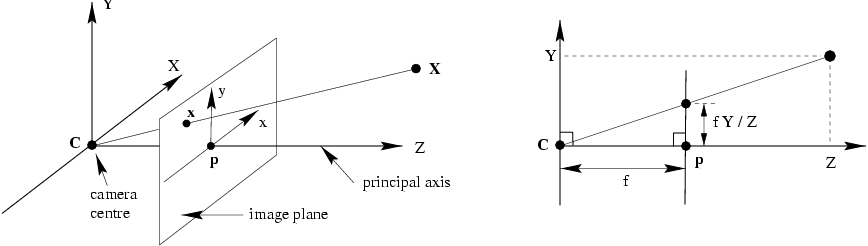
2016-09-22 12:04:450 我們首先介紹下計(jì)算機(jī)視覺領(lǐng)域中常見的三個(gè)坐標(biāo)系:圖像坐標(biāo)系,相機(jī)坐標(biāo)系,世界坐標(biāo)系。以及他們之間的關(guān)系。然后介紹如何使用張正友相機(jī)標(biāo)定法標(biāo)定相機(jī)。攝像機(jī)標(biāo)定(Camera calibration)簡單來說是從世界坐標(biāo)系換到圖像坐標(biāo)系的過程,也就是求最終的投影矩陣的過程。
2017-12-04 16:56:3517861 
OpenCV sample目錄下自帶兩個(gè)與相機(jī)標(biāo)定的cpp文件即:calibration.cpp和calibration_artificial.cppcalibration.cpp 是通過用戶輸入
2017-12-04 17:23:263427 
針對基于C形臂的手術(shù)導(dǎo)航系統(tǒng)中相機(jī)標(biāo)定這一關(guān)鍵技術(shù)中存在的過渡環(huán)節(jié)過多、參數(shù)求解過程復(fù)雜等問題,提出一種完全忽略相機(jī)模型的解決方法。該方法完全忽略相機(jī)模型,在映射參數(shù)求解過程中簡化了過渡環(huán)節(jié),使得
2017-12-14 15:31:305 針對張正友標(biāo)定方法中相機(jī)內(nèi)參數(shù)的求解可能陷入局部最優(yōu)解的問題,考慮鏡頭的三階徑向畸變和二階離心畸變,提出一種基于改進(jìn)遺傳算法的單目相機(jī)內(nèi)參數(shù)優(yōu)化標(biāo)定方案。該方法可顯著提高相機(jī)標(biāo)定中內(nèi)參數(shù)的精度,并能避免陷入局部最優(yōu)。最后,實(shí)驗(yàn)驗(yàn)證了所提方案的有效性和可行性。
2018-01-05 16:11:491 相機(jī)標(biāo)定可以說是計(jì)算機(jī)視覺/機(jī)器視覺的基礎(chǔ),但是初學(xué)者不易上手,本文將給讀者整理一遍相機(jī)標(biāo)定的邏輯,并在文末回答評論區(qū)提出的問題。分為以下內(nèi)容:
2019-06-01 09:54:153971 
為了在精確測量中盡量消除誤差,標(biāo)定CCD相機(jī)在實(shí)際測量環(huán)境中的內(nèi)部參數(shù)有著重要的意義。
2020-03-21 11:58:0514 這種情況的標(biāo)定過程實(shí)際上和相機(jī)和機(jī)械手分離的標(biāo)定方法是一樣的,因?yàn)?b class="flag-6" style="color: red">相機(jī)拍照時(shí),機(jī)械手會運(yùn)動到相機(jī)標(biāo)定的時(shí)候的位置,然后相機(jī)拍照,得到目標(biāo)的坐標(biāo),再控制機(jī)械手,所以簡單的相機(jī)固定在末端的手眼系統(tǒng)很多都是采用這種方法,標(biāo)定的過程和手眼分離系統(tǒng)的標(biāo)定是可以相同對待的。
2020-07-11 09:57:505357 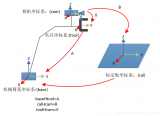
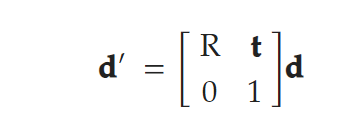
在實(shí)際控制中,相機(jī)檢測到目標(biāo)在圖像中的像素位置后,通過標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機(jī)的像素坐標(biāo)變換到機(jī)械手的空間坐標(biāo)系中,然后根據(jù)機(jī)械手坐標(biāo)系計(jì)算出各個(gè)電機(jī)該如何運(yùn)動,從而控制機(jī)械手到達(dá)指定位置。這個(gè)過程中涉及到了圖像標(biāo)定,圖像處理,運(yùn)動學(xué)正逆解,手眼標(biāo)定等。
2020-08-28 11:42:4610854 
在圖像測量過程以及機(jī)器視覺應(yīng)用中,為確定空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對應(yīng)點(diǎn)之間的相互關(guān)系,必須建立相機(jī)成像的幾何模型,這些幾何模型參數(shù)就是相機(jī)參數(shù)。
2020-08-28 15:18:0812723 采用張正友提出的基于2D平面棋盤格的攝像機(jī)標(biāo)定方法,利用Matlab攝像頭標(biāo)定工具完成相機(jī)參數(shù)的標(biāo)定。
2020-08-31 10:04:124715 
轉(zhuǎn)自:微信公眾號AI圖像 創(chuàng)建標(biāo)定數(shù)據(jù)模型 你可以用算子create_calib_data創(chuàng)建一個(gè)標(biāo)定數(shù)據(jù)模型,指定相機(jī)和標(biāo)定物體的數(shù)量。當(dāng)用一個(gè)相機(jī)的時(shí)候,你也用一個(gè)單獨(dú)的標(biāo)定物體。 然后,你要做
2020-10-31 11:31:383434 
標(biāo)定板特征成像不能出現(xiàn)明顯的離焦距,出現(xiàn)離焦時(shí)可通過調(diào)整調(diào)整標(biāo)定板的距離、光圈的大小和像距(對于定焦鏡頭,通常說的調(diào)焦就是指調(diào)整像距)。
2020-11-01 11:26:413510 張正友相機(jī)標(biāo)定法是張正友教授1998年提出的單平面棋盤格的相機(jī)標(biāo)定方法。傳統(tǒng)標(biāo)定法的標(biāo)定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統(tǒng)標(biāo)定法和自標(biāo)定法之間,但克服了傳統(tǒng)標(biāo)定
2020-12-31 10:06:195420 
MT-002: 奈奎斯特準(zhǔn)則對數(shù)據(jù)采樣系統(tǒng)設(shè)計(jì)有何意義
2021-03-20 10:16:344 下,提岀了一種加權(quán)相機(jī)標(biāo)定的方法,其權(quán)重考慮了控制點(diǎn)的模糊量信息。首先對棋盤格標(biāo)定物上的每一個(gè)角點(diǎn)進(jìn)行散焦模糊量估計(jì),在標(biāo)定過程中,將散焦模糊量的大小作為一個(gè)權(quán)重加人到標(biāo)定能量函數(shù)最小化過程中,使得標(biāo)定精度得到
2021-04-21 15:05:5716 組成的多軸系統(tǒng)、Scara四軸機(jī)器、六軸機(jī)器人(在運(yùn)行過程中保證幾個(gè)自由度不動,運(yùn)行即可) 一、 標(biāo)定介紹 1.? 標(biāo)定模型A:相機(jī)固定(夾具不旋轉(zhuǎn)) 夾具夾取產(chǎn)品或者標(biāo)定塊,選取一個(gè)特征,開始進(jìn)行標(biāo)定 X軸、Y軸移動一個(gè)位置,記錄軸的物理坐標(biāo)
2021-05-08 10:05:1834068 
針對魚眼鏡頭的高精度標(biāo)定需求,提岀一種基于除法畸變模型的線性標(biāo)定方法。通過除法模型將題轉(zhuǎn)換為線性方程組求解問題相機(jī)畸變中心后對畸變方程矩陣進(jìn)行解耦,分別求解相機(jī)內(nèi)外參數(shù)和畸變系數(shù)實(shí)現(xiàn)魚眼鏡頭的快速魯棒標(biāo)定。實(shí)驗(yàn)結(jié)果線性標(biāo)定方法相方法在保證標(biāo)定準(zhǔn)性和可靠性計(jì)算效率提高了約10倍。
2021-05-19 11:39:057 相機(jī)固定不動, 上往下看引導(dǎo)機(jī)器人移動 機(jī)器人與視覺標(biāo)定理論詳解 1.相機(jī)非線性校正使用標(biāo)定板做非線性校正2.相機(jī)與機(jī)器人做9點(diǎn)標(biāo)定可以使用機(jī)器人扎9個(gè)點(diǎn),或者機(jī)器人抓住工件擺放9個(gè)位置,得到
2021-05-27 14:15:533251 
針對傳統(tǒng)標(biāo)定方法參數(shù)考慮較少、標(biāo)定精度不高的缺點(diǎn),將群智能算法思想應(yīng)用其中,并在現(xiàn)有的粒子群算法和灰狼算法基礎(chǔ)上進(jìn)行優(yōu)化,取長補(bǔ)短,提出一種混合算法。首先,基于張正友方法獲得標(biāo)定的參數(shù)范圍
2021-05-31 11:09:515 在這里我們所說的雙目標(biāo)定是狹義的,講解理論的時(shí)候僅指兩臺相機(jī)之間相互位置的標(biāo)定,在代碼實(shí)踐的時(shí)候,我們才說完整的雙目標(biāo)定。
2021-07-04 11:04:1610836 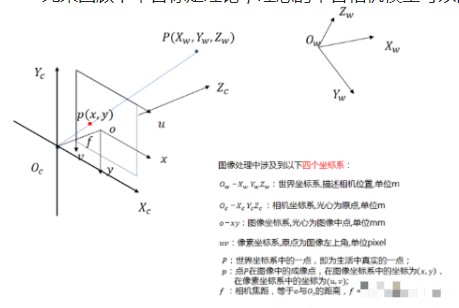
為什么要進(jìn)行單相機(jī)標(biāo)定? 廣義:畸變矯正和一維和二維測量 畸變矯正: 在幾何光學(xué)和陰極射線管(CRT)顯示中。畸變是對直線投影的一種偏移。簡單來說直線投影是場景內(nèi)的一條直線投影到圖片上也保持為一條
2021-09-02 09:45:383084 在大多數(shù)條件下,這些參數(shù)必須通過實(shí)驗(yàn)與計(jì)算才能得到。無論是在圖像測量或者機(jī)器視覺應(yīng)用中,相機(jī)參數(shù)的標(biāo)定都是非常關(guān)鍵的環(huán)節(jié),其標(biāo)定結(jié)果的精度及算法的穩(wěn)定性直接影響相機(jī)工作產(chǎn)生結(jié)果的準(zhǔn)確性。
2022-06-21 11:12:347612 在實(shí)際控制中,相機(jī)檢測到目標(biāo)在圖像中的像素位置后,通過標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機(jī)的像素坐標(biāo)變換到機(jī)械手的空間坐標(biāo)系中,然后根據(jù)機(jī)械手坐標(biāo)系計(jì)算出各個(gè)電機(jī)該如何運(yùn)動,從而控制機(jī)械手到達(dá)指定位置。這個(gè)過程中涉及到了圖像標(biāo)定,圖像處理,運(yùn)動學(xué)正逆解,手眼標(biāo)定等。
2022-08-18 15:54:375457 來自CMU Robotics Institute, 已知最早3D Laser與相機(jī)標(biāo)定的工作(2005年),基于matlab的圖形用戶界面,進(jìn)行激光雷達(dá)相機(jī)外參標(biāo)定。
2022-11-10 14:59:262577 張正友相機(jī)標(biāo)定法是張正友教授1998年提出的單平面棋盤格的相機(jī)標(biāo)定方法。傳統(tǒng)標(biāo)定法的標(biāo)定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統(tǒng)標(biāo)定法和自標(biāo)定法之間,但克服了傳統(tǒng)標(biāo)定
2022-11-14 10:14:402382 因?yàn)?b class="flag-6" style="color: red">相機(jī)成像的模型比較復(fù)雜,所以依賴于一張圖像來標(biāo)定相機(jī)是不可靠的。但是我們可以把世界坐標(biāo)固定在標(biāo)定板上,通過轉(zhuǎn)動和平移標(biāo)定板來得到多幅不同的圖像。
2022-11-22 10:34:053072 相機(jī)標(biāo)定可以歸納為P?n?P(Perspective-n-Point)的問題,即已知三維物點(diǎn)坐標(biāo)和對應(yīng)的二維投影坐標(biāo),求解相機(jī)參數(shù)。由于鏡頭的畸變(徑向和切向)帶來非線性成像模型,一般求解方法分為兩步:
2022-12-21 09:52:30858 在這里我們所說的雙目標(biāo)定是狹義的,講解理論的時(shí)候僅指兩臺相機(jī)之間相互位置的標(biāo)定,在代碼實(shí)踐的時(shí)候,我們才說完整的雙目標(biāo)定。
2022-12-28 17:17:241978 改變系統(tǒng)相對標(biāo)定板的位姿,重復(fù)步驟34,拍攝>15組數(shù)據(jù)。使用拍攝的標(biāo)定板圖片進(jìn)行相機(jī)標(biāo)定,獲得相機(jī)內(nèi)外參,并保存每個(gè)標(biāo)定板的角點(diǎn)位置信息。
2022-12-29 09:57:22406 此方法采用一塊大標(biāo)定板來統(tǒng)一各個(gè)相機(jī)的坐標(biāo),每個(gè)大標(biāo)定板中有若干小標(biāo)定板,各個(gè)小標(biāo)定板間的位置關(guān)系都是已知的,各個(gè)相機(jī)都能拍攝到一個(gè)小標(biāo)定板。通過各個(gè)小標(biāo)定板可以標(biāo)定每個(gè)相機(jī)的內(nèi)部參數(shù)和外部參數(shù),每個(gè)相機(jī)的坐標(biāo)都可以轉(zhuǎn)換到各個(gè)小標(biāo)定板的坐標(biāo)系上,從而統(tǒng)一各個(gè)相機(jī)的坐標(biāo)。
2023-03-13 10:06:371506 該數(shù)據(jù)集包括了不同仿真環(huán)境下生成的合成數(shù)據(jù),以及不同場景下由各類真實(shí)相機(jī)采集到的圖像和視頻序列。每一個(gè)數(shù)據(jù)樣本均提供了準(zhǔn)確的標(biāo)定結(jié)果、相機(jī)參數(shù)、或視覺線索。
2023-04-10 10:45:38212 機(jī)械手搭載雙目相機(jī),手眼標(biāo)定。
2023-04-20 16:32:43858 相機(jī)標(biāo)定是通過輸入帶有標(biāo)定patter的標(biāo)定板來獲得相機(jī)參數(shù)的一個(gè)過程。實(shí)際的光學(xué)成像是一套非常復(fù)雜的過程,從三維世界投影到相機(jī)中的二維圖像。相機(jī)標(biāo)定就是用抽象的數(shù)學(xué)模型來表示這個(gè)復(fù)雜的成像過程。
2023-06-01 14:36:46430 
相機(jī)標(biāo)定是計(jì)算機(jī)視覺最基礎(chǔ)也是至關(guān)重要的一個(gè)問題,標(biāo)定的精度夠不夠決定了以后的校正、去畸變、配準(zhǔn)、計(jì)算三維坐標(biāo)、恢復(fù)三維模型能否進(jìn)一步做下去。
2023-06-26 09:51:30312 首先,課程介紹了雙目相機(jī)標(biāo)定的基礎(chǔ)知識。我了解到雙目相機(jī)是由兩個(gè)相機(jī)組成的系統(tǒng),通過同時(shí)拍攝目標(biāo)物體的兩個(gè)視角來獲取三維信息。
2023-07-03 14:25:061922 
在實(shí)際控制中,相機(jī)檢測到目標(biāo)在圖像中的像素位置后,通過標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機(jī)的像素坐標(biāo)變換到機(jī)械手的空間坐標(biāo)系中,然后根據(jù)機(jī)械手坐標(biāo)系計(jì)算出各個(gè)電機(jī)該如何運(yùn)動,從而控制機(jī)械手到達(dá)指定位置。這個(gè)過程中涉及到了圖像標(biāo)定,圖像處理,運(yùn)動學(xué)正逆解,手眼標(biāo)定等。
2023-07-03 15:45:152286 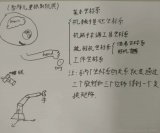
機(jī)械手搭載雙目相機(jī),手眼標(biāo)定。
2023-07-11 11:18:21831 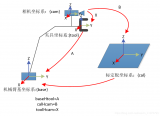
張正友標(biāo)定方法是一種經(jīng)典的相機(jī)標(biāo)定方法,目前是最受歡迎的方法之一。該方法通過一種機(jī)器學(xué)習(xí)的方法,利用大量匹配的數(shù)據(jù)點(diǎn)像素坐標(biāo)、世界坐標(biāo),基于極大似然估計(jì)擬合得到一個(gè)最優(yōu)解。
2023-08-03 10:59:12641 
對于攝像機(jī)標(biāo)定問題已提出了很多方法,攝像機(jī)標(biāo)定的理論問題已得到較好的解決,對攝像機(jī)標(biāo)定的研究來說,當(dāng)前的研究工作應(yīng)該集中在如何針對具體的實(shí)際應(yīng)用問題,采用特定的簡便、實(shí)用、快速、準(zhǔn)確的標(biāo)定方法。
2023-08-04 12:54:171387 
選中Export Camera Parameters按鈕,將計(jì)算得到的相關(guān)參數(shù)導(dǎo)入到Matlab中;若要進(jìn)行更精確的標(biāo)定,可在標(biāo)定時(shí)考慮畸變誤差或采用雙目相機(jī)標(biāo)定方法。
2023-10-09 10:51:50511 
本文提出了一種自動在線激光雷達(dá)相機(jī)自標(biāo)定方法CFNet。CFNet是全自動的,不需要特定的校準(zhǔn)場景、校準(zhǔn)目標(biāo)和初始校準(zhǔn)參數(shù)。我們定義一個(gè)校準(zhǔn)流來表示初始投影點(diǎn)的位置與地面真值之間的偏差。
2023-10-10 11:44:43340 
這個(gè)逼近的過程就是「相機(jī)標(biāo)定」,我們用簡單的數(shù)學(xué)模型來表達(dá)復(fù)雜的成像過程,并且求出成像的反過程。標(biāo)定之后的相機(jī),可以進(jìn)行三維場景的重建,即深度的感知,這是計(jì)算機(jī)視覺的一大分支。
2023-10-18 17:00:07476 
在選擇標(biāo)定板時(shí),一個(gè)重要的考慮因素是它的物理尺寸。這最終關(guān)系到最終應(yīng)用的測量視場(FOV)。這是因?yàn)?b class="flag-6" style="color: red">相機(jī)需要聚焦在特定的距離上標(biāo)定。改變焦距長度會輕微地影響對焦距離,這會影響之前的標(biāo)定。即使是光圈的改變通常也會對標(biāo)定的有效性產(chǎn)生負(fù)面影響,這就是為什么要避免改動它們。
2023-11-25 14:36:08415 
ROS功能包:livox_camera_lidar_calibration提供了一個(gè)手動校準(zhǔn)Livox雷達(dá)和相機(jī)之間外參的方法,已經(jīng)在Mid-40,Horizon和Tele-15上進(jìn)行了驗(yàn)證。 其中
2023-11-28 11:09:12210 
相機(jī)標(biāo)定中的基本坐標(biāo)系有:像素坐標(biāo)系、圖像坐標(biāo)系、相機(jī)坐標(biāo)系、世界坐標(biāo)系,這些坐標(biāo)系之間都有一定的轉(zhuǎn)換關(guān)系,若這些轉(zhuǎn)換關(guān)系已知,就可以得到世界坐標(biāo)(棋盤上的點(diǎn))和像素坐標(biāo)之間的關(guān)系。
2023-12-19 10:42:49209 
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論