伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2022-08-17 11:01:34 6057
6057 PLC與伺服驅(qū)動(dòng)器的編程接線方法。伺服控制系統(tǒng)的使用方法其實(shí)跟變頻器類似,它的作用類似于變頻器應(yīng)用于普通的交流馬達(dá),也是屬于PLC伺服控制系統(tǒng)的一部分,主要應(yīng)用于高精度的定位系統(tǒng),在這里需要注意的是伺服驅(qū)動(dòng)器方面如何去正確接線。
2022-10-21 09:14:333006 使用伺服電機(jī)在機(jī)器人技術(shù)中很常見,以實(shí)現(xiàn)精確控制。在這里,在本教程中,我們將向您展示如何通過藍(lán)牙連接將伺服電機(jī)與Arduino UNO和Android設(shè)備無線使用。我們已經(jīng)使用 Arduino 控制了伺服,這次我們使用 Arduino 和藍(lán)牙控制伺服電機(jī)。
2022-11-16 16:19:572601 
在自動(dòng)化項(xiàng)目開發(fā)的過程中,進(jìn)行一些高精度的定位控制。選用伺服電機(jī)作為執(zhí)行器件可快速實(shí)現(xiàn)高精度控制系統(tǒng)的構(gòu)建。
2023-03-02 14:23:273983 
轉(zhuǎn)矩控制方式是通過外部模擬量的輸入或直接的地址的賦值來設(shè)定電機(jī)軸對(duì)外的輸出轉(zhuǎn)矩的大小,具體表現(xiàn)為例如10V對(duì)應(yīng)5Nm的話,當(dāng)外部模擬量設(shè)定為5V時(shí)電機(jī)軸輸出為2.5Nm:如果電機(jī)軸負(fù)載低于2.5Nm時(shí)電機(jī)正轉(zhuǎn),外部負(fù)載等于2.5Nm時(shí)電機(jī)不轉(zhuǎn),大于2.5Nm時(shí)電機(jī)反轉(zhuǎn)(通常在有重力負(fù)載情況下產(chǎn)生)。
2023-03-15 10:05:271431 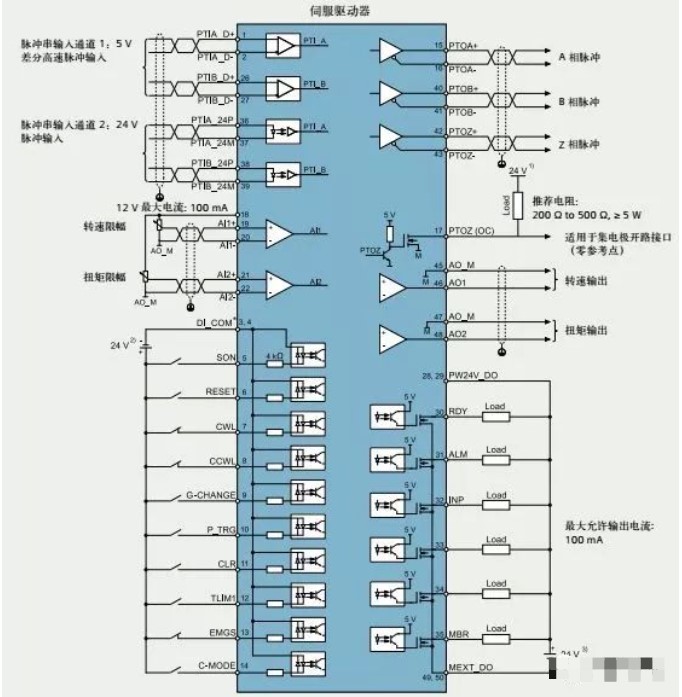
以三菱PLC控制伺服馬達(dá)為例,具體分享一下伺服馬達(dá)控制步驟。
2023-04-11 09:08:382788 1200PLC控制伺服電機(jī)沒有原點(diǎn)傳感器可以回零嗎?
2023-03-30 16:40:53
PLC控制伺服電機(jī)找原點(diǎn)的方法是什么?
2021-09-29 07:16:34
今天為大家講解的是關(guān)于PLC控制伺服電機(jī)三種方式: 一、轉(zhuǎn)矩控制 二、位置控制 三、速度模式 1、轉(zhuǎn)矩控制 轉(zhuǎn)矩控制方式是通過外部模擬量的輸入或直接的地址的賦值來設(shè)定電機(jī)軸對(duì)外的輸出轉(zhuǎn)矩的大小
2019-10-27 08:00:00
1.程序的解釋 一.簡(jiǎn)單法: DRVA D1000 D1100 Y0 Y4 DRVA這個(gè)是絕對(duì)位置控制指令;D1000是絕對(duì)位置指定;D1100是脈沖輸出頻率;Y0脈沖輸出地址;Y4是方向輸出
2021-06-28 06:15:00
PLC控制伺服的原理是什么?PLC控制伺服的模式有哪幾種?
2021-10-11 08:45:46
PLC與伺服電機(jī)怎么連接?
2021-09-29 06:11:10
上位機(jī)PLC發(fā)脈沖給伺服驅(qū)動(dòng)器,那伺服驅(qū)動(dòng)器怎么知道他發(fā)了多少呢?(前提是,既讓伺服驅(qū)動(dòng)器正常控制伺服電機(jī),又可以及時(shí)改變速度和旋轉(zhuǎn)角度)?
2016-01-29 14:21:12
PLC是如何控制伺服電機(jī):通過發(fā)送的脈沖
2021-02-04 06:04:22
(一)PLC是怎么控制伺服電機(jī)的?在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服
2021-09-06 06:00:20
PLC步進(jìn)電機(jī)指令可以控制伺服電機(jī)么? 也就是步進(jìn)電機(jī)指令和伺服電機(jī)指令有區(qū)別嗎?
2023-03-30 17:34:11
PLC步進(jìn)電機(jī)指令可以控制伺服電機(jī)么? 也就是步進(jìn)電機(jī)指令和伺服電機(jī)指令有區(qū)別嗎?
2023-03-30 17:34:10
用一個(gè)plc控制4個(gè)伺服或者步進(jìn)電機(jī),高速脈沖輸出,貌似FX2n不行啊。。。求大神給點(diǎn)資料。。。接線圖或者程序都行。。。
2015-04-29 21:11:55
plc控制伺服電機(jī)的下位機(jī)系統(tǒng)有什么程序?伺服電機(jī)的控制方式包括哪幾種?plc控制伺服電機(jī)的上位機(jī)系統(tǒng)有什么功能?
2021-06-28 07:14:41
如何用伺服電機(jī)控制四個(gè)蝸桿同時(shí)上下運(yùn)動(dòng),需要多少個(gè)電機(jī)
2018-05-12 01:01:56
伺服電機(jī)的應(yīng)用領(lǐng)域有哪些?伺服電機(jī)有哪些控制模式?
2021-09-27 06:21:31
本人剛接觸伺服驅(qū)動(dòng)器,知到伺服驅(qū)動(dòng)器每轉(zhuǎn)128萬個(gè)脈沖,想精確確定每18°是多少個(gè)脈沖,要調(diào)那些參數(shù)嗎?最后要用PLC控制伺服電機(jī)
2021-06-20 22:52:33
Omron plc控制伺服電機(jī),不在梯形圖上加脈沖,伺服電機(jī)仍然運(yùn)轉(zhuǎn),怎么回事
2018-09-01 09:27:23
通過labview控制伺服電機(jī),我現(xiàn)在有伺服電機(jī)和驅(qū)動(dòng)器,NI的采集卡,電腦,他們是如何連接的?還需要什么東西嗎
2016-09-22 20:34:31
FX1S雖然非常老舊,但定位指令卻基本是齊全的,所以就拿來學(xué)習(xí)用PLC控制伺服電機(jī)了。注意一定要是晶體管輸出類型的才可以輸出脈沖。1、接線伺服驅(qū)動(dòng)器主回路的線比較好接,主要是主電源線、控制電源線,以
2021-06-28 07:38:26
三菱FX1S PLC如何控制伺服電機(jī)?
2021-09-27 07:04:04
為什么用PLC控制伺服控制器一給使能電機(jī)就轉(zhuǎn)(此時(shí)PLC還沒運(yùn)行呢),控制器和電機(jī)都已經(jīng)測(cè)試好了
2023-12-11 07:00:33
在一條絲桿的中間安裝一個(gè)原點(diǎn)感應(yīng)器,只有這一個(gè),這樣用PLC找原點(diǎn)比較合適,因?yàn)楣ぷ鲿r(shí)是會(huì)原點(diǎn)上下都去的,用普通原點(diǎn)復(fù)歸在異常斷電時(shí),如果在原點(diǎn)另一邊則會(huì)找不到原點(diǎn)可以自己寫一個(gè)會(huì)原點(diǎn)程序,向前走
2021-06-28 07:22:52
其他版塊不熟悉,還是在labview版塊發(fā)帖。最近在弄一個(gè)多軸伺服系統(tǒng)。目前只控兩軸。PLC控制伺服電機(jī)。需求是在一個(gè)運(yùn)動(dòng)周期內(nèi),兩軸的運(yùn)動(dòng)位移不同,但是要求同時(shí)啟動(dòng)、同時(shí)到達(dá)(因?yàn)橐?b class="flag-6" style="color: red">控制軌跡
2017-09-11 11:41:18
伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2021-01-21 07:38:46
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2021-01-22 07:46:05
伺服驅(qū)動(dòng)器和伺服電機(jī)的接線方法是什么?伺服驅(qū)動(dòng)器如何進(jìn)行參數(shù)配置?如何通過PLC控制伺服電機(jī)的正反轉(zhuǎn)及定長控制?
2021-09-29 08:38:16
三環(huán)控制的原理是什么?影響伺服電機(jī)控制的因素是什么?
2021-09-28 06:18:57
手上有安川電機(jī)和伺服器一套,伺服器上有支持串口通信的接口,串口通信的協(xié)議為MODBUS。。本來這個(gè)接口設(shè)計(jì)是給PLC用的,如果我在工控機(jī)LABVIEW里有MODBUS協(xié)議模塊與伺服器通訊,是否也可以實(shí)現(xiàn)對(duì)電機(jī)的控制?
2015-09-28 18:09:03
PLC控制伺服電機(jī)的控制程序和鍛煉學(xué)生的動(dòng)手能力。3.職業(yè)道德:培養(yǎng)學(xué)生對(duì)的認(rèn)知分析能力,并能從硬件到軟件的過渡,認(rèn)識(shí)課程學(xué)習(xí)與職業(yè)崗位的關(guān)系,通過本課程
2021-06-28 09:29:58
伺服電機(jī)的特點(diǎn)有哪些?伺服電機(jī)有哪幾種類型?不同類型伺服電機(jī)相應(yīng)的控制原理是什么?
2021-06-17 10:50:13
請(qǐng)問PLC是怎么控制伺服電機(jī)的?
2021-09-26 06:04:03
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機(jī)驅(qū)動(dòng)器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd在做一個(gè)課設(shè),用三菱FX-3U(C)型號(hào)的plc能夠讓一個(gè)伺服電機(jī)實(shí)現(xiàn)正弦形式的加速或者減速過程么,做不出來,問一下前輩們這個(gè)方案的可行性。謝謝!
2019-05-23 15:49:57
倍福PLC控制臺(tái)達(dá)伺服電機(jī)遇到的使能問題應(yīng)該如何解決?
2021-10-13 06:30:31
請(qǐng)問臺(tái)達(dá)PLC如何實(shí)現(xiàn)伺服電機(jī)的正反轉(zhuǎn)?
2021-09-26 07:13:13
本文介紹了采用PLC 控制伺服電機(jī)驅(qū)動(dòng)而構(gòu)成的控制系統(tǒng),進(jìn)行EAST-ICRH 天線電容的調(diào)控。闡述其系統(tǒng)的主要硬件構(gòu)成以及程序控制。關(guān)鍵詞:可編程邏輯控制器;伺服電動(dòng)機(jī);電
2009-08-05 08:56:05 25
25 針對(duì)某落地鏜床相對(duì)落后的液壓控制系統(tǒng),提出了采用先進(jìn)成熟的PLC 技術(shù)和交流伺服電機(jī)的控制系統(tǒng)對(duì)其進(jìn)行改造。實(shí)踐證明,改造后的控制系統(tǒng)在運(yùn)行穩(wěn)定可靠、維護(hù)簡(jiǎn)單易行
2009-09-18 11:17:1261 直流伺服電機(jī)速度控制原理
直流伺服電機(jī)結(jié)構(gòu)示意圖
2010-02-25 17:36:553756 
本文旨在闡述利用PLC控制伺服電機(jī)實(shí)現(xiàn)準(zhǔn)確定位的方法,介紹控制系統(tǒng)在設(shè)計(jì)與實(shí)施中需要認(rèn)識(shí)與解決的若干問題,給出了控制系統(tǒng)參考方案及軟硬件結(jié)構(gòu)的設(shè)計(jì)思路,對(duì)于工業(yè)生產(chǎn)中
2011-07-12 11:05:3692890 
2012-06-15 11:43:300 2015-06-13 17:48:408 2015-07-13 16:25:4416 PLC控制伺服電機(jī)應(yīng)用實(shí)例。
介紹PLC如何控制伺服電機(jī)應(yīng)用的實(shí)例。
2016-05-05 11:37:3962 三菱PLC(可編程邏輯控制器)編程實(shí)例項(xiàng)目例程-伺服電機(jī)控制
2022-03-22 16:53:0141 伺服電機(jī)控制PLC程序
2016-12-17 16:18:379 由PLC與伺服電機(jī)組成一個(gè)系統(tǒng),通過PLC控制伺服電機(jī),實(shí)現(xiàn)機(jī)構(gòu)的原點(diǎn)回歸、相對(duì)定位和絕對(duì)定位功能
2017-11-13 06:01:0032048 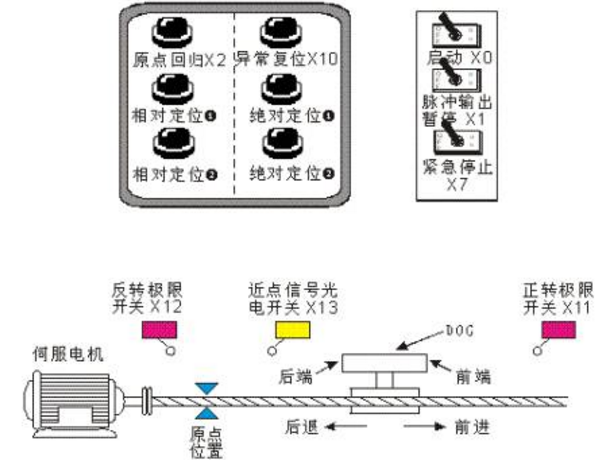
伺服定位控制可以在PLC中實(shí)現(xiàn),也可以在伺服控制器中實(shí)現(xiàn)。用PLC實(shí)現(xiàn),可選用317-T的工藝型CPU,內(nèi)置定位控制功能。PLC通過通訊向伺服發(fā)送速度指令,并將伺服的反饋取到PLC中,在PLC中實(shí)現(xiàn)
2018-02-01 15:17:0410170 本文詳細(xì)介紹了實(shí)現(xiàn)永宏PLC接伺服控制,希望對(duì)機(jī)電控制的工程師有所幫助。
2018-02-26 19:39:485201 PLC控制伺服電機(jī)學(xué)習(xí)資料
2018-04-02 16:17:2254 伺服電機(jī)是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的伺服電機(jī),屬于功率很小的微特電機(jī)。伺服電機(jī)分為直流伺服電機(jī)和交流伺服電機(jī),以永磁式直流伺服電機(jī)和并激式直流伺服電機(jī)最為常用。
2018-04-02 15:47:2350713 本文主要詳解PLC控制伺服系統(tǒng)步驟,首先介紹了PLC工作原理以及PLC控制伺服電機(jī)3種方式,其次闡述了西門子PLC控制的伺服控制系統(tǒng),具體的跟隨小編一起來了解一下。
2018-06-01 10:46:1250851 對(duì)于程序編寫,這個(gè)差別很大,日系PLC是采用指令的方式,而歐系PLC是采用功能塊的形式。但實(shí)質(zhì)是一樣的,比如要控制伺服走一個(gè)絕對(duì)定位,我們就需要控制PLC的輸出通道,脈沖數(shù),脈沖頻率,加減
2018-06-27 09:36:4918590 伺服電機(jī)最主要的應(yīng)用還是定位控制,位置控制有兩個(gè)物理量需要控制,那就是速度和位置,確切的說,就是控制伺服電機(jī)以多快的速度到達(dá)什么地方,并準(zhǔn)確的停下。
2018-07-23 14:55:001782 相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。
2018-08-12 10:34:075752 轉(zhuǎn)矩控制方式是通過外部模擬量的輸入或直接的地址的賦值來設(shè)定電機(jī)軸對(duì)外的輸出轉(zhuǎn)矩的大小。
2018-11-25 10:58:4627970 
速度控制一般都是有變頻器實(shí)現(xiàn),用伺服電機(jī)做速度控制,一般是用于快速加減速或是速度精準(zhǔn)控制的場(chǎng)合,因?yàn)橄鄬?duì)于變頻器,伺服電機(jī)可以在幾毫米內(nèi)達(dá)到幾千轉(zhuǎn),由于伺服都是閉環(huán)的,速度非常穩(wěn)定。
2018-12-26 17:33:357587 位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉(zhuǎn)動(dòng)速度的大小,通過脈沖的個(gè)數(shù)來確定轉(zhuǎn)動(dòng)的角度,也有些伺服可以通過通訊方式直接對(duì)速度和位移進(jìn)行賦值。
2019-05-29 11:42:5424680 
如何用一個(gè)PLC控制兩個(gè)或多個(gè)伺服電機(jī)同步運(yùn)行主電機(jī)速度改變時(shí),其它伺服電機(jī)也跟著同步運(yùn)行。用第一個(gè)伺服驅(qū)動(dòng)的輸出控制第二個(gè)伺服驅(qū)動(dòng)器,就可以實(shí)現(xiàn)同步運(yùn)動(dòng)了,只要要求不是太高這種方法完全可行。同步分控制精度來確定控制方案的。
2019-07-18 08:00:0021 伺服電機(jī)如何與plc連接?這個(gè)首先要看你使用伺服電機(jī)的哪種模式,有位置模式、速度模式以及轉(zhuǎn)矩模式,位置模式一般用于定位功能的,最常見最簡(jiǎn)單的方式就是通過脈沖+方向的形式來驅(qū)動(dòng)伺服驅(qū)動(dòng)器,位置
2019-09-13 16:51:0037943 伺服驅(qū)動(dòng)器通過接收的脈沖頻率和數(shù)量來控制伺服電機(jī)運(yùn)行的距離和速度。比如,我們約定伺服電機(jī)每10000個(gè)脈沖轉(zhuǎn)一圈。如果PLC在一分鐘內(nèi)發(fā)送10000個(gè)脈沖,那么伺服電機(jī)就以1r/min的速度走完一圈,如果在一秒鐘內(nèi)發(fā)送10000個(gè)脈沖,那么伺服電機(jī)就以60r/min的速度走完一圈。
2019-12-09 08:51:4617113 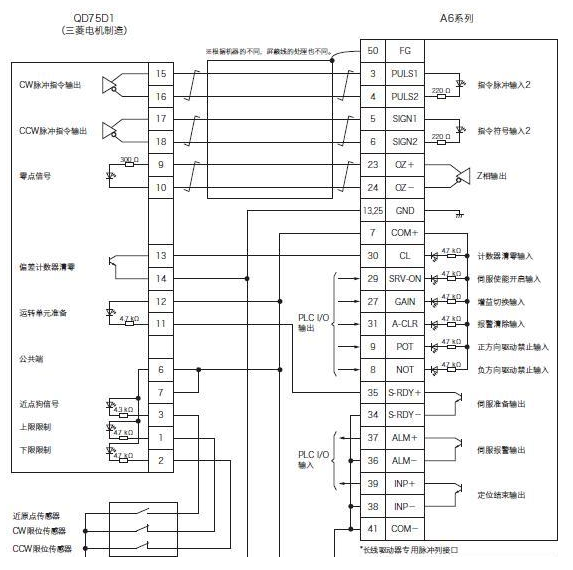
伺服的結(jié)構(gòu)是怎樣的?一個(gè)最簡(jiǎn)易的伺服控制單元,就是一個(gè)伺服電機(jī)加伺服控制器,今天就來解析下伺服電機(jī)與伺服控制器。
2020-09-24 10:54:3412382 
經(jīng)常聽到眾多人說plc控制伺服電機(jī)運(yùn)行,那么也有人疑惑可以不可以控制步進(jìn)呢?答案是可以的,也需要配步進(jìn)電機(jī)驅(qū)動(dòng)器。plc控制步進(jìn)電機(jī)其實(shí)在使用中有一個(gè)很大的特點(diǎn),就是在使用的時(shí)候?qū)Σ竭M(jìn)電機(jī)的也具有
2021-01-12 16:14:283387 轉(zhuǎn)矩控制方式是通過外部模擬量的輸入或直接的地址的賦值來設(shè)定電機(jī)軸對(duì)外的輸出轉(zhuǎn)矩的大小,具體表現(xiàn)為例如10V對(duì)應(yīng)5Nm的話,當(dāng)外部模擬量設(shè)定為5V時(shí)電機(jī)軸輸出為2.5Nm:如果電機(jī)軸負(fù)載低于2.5Nm時(shí)電機(jī)正轉(zhuǎn),外部負(fù)載等于2.5Nm時(shí)電機(jī)不轉(zhuǎn),大于2.5Nm時(shí)電機(jī)反轉(zhuǎn)(通常在有重力負(fù)載情況下產(chǎn)生)。
2021-03-14 16:25:4718603 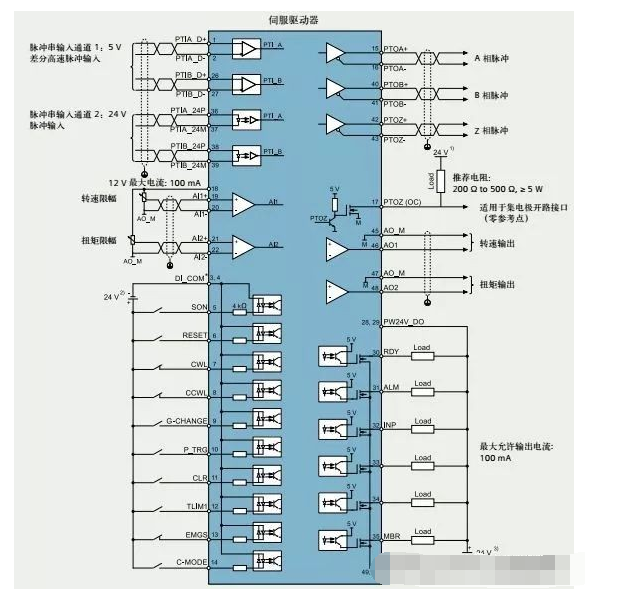
什么是伺服電機(jī)?伺服電機(jī)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),分為直流伺服電機(jī)和交流伺服電動(dòng)機(jī)兩大類。
2022-01-14 17:30:2816208 不管是伺服電機(jī)還是其他的什么變頻電機(jī)、步進(jìn)電機(jī),它們都能通過總線被PLC控制,畢竟人家PLC就叫可編程邏輯控制器,它是控制器。
2022-09-30 10:22:512778 PLC在自動(dòng)化控制領(lǐng)域中,應(yīng)用十分廣泛。尤其是近幾年PLC在處理速度,指令及容量、單軸控制方面得到飛速的發(fā)展,使得PLC在控制伺服電機(jī)方面也變得簡(jiǎn)單易行。
2022-12-01 14:28:351182 伺服電機(jī)是一種可以通過控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動(dòng)電流,從而控制電機(jī)的位置和運(yùn)動(dòng)。因此在很多需要高精度運(yùn)動(dòng)控制的領(lǐng)域得到了廣泛應(yīng)用。
2023-03-03 11:17:278928 伺服電機(jī)通常由以下幾個(gè)主要部分組成:
電機(jī)部分:伺服電機(jī)的電機(jī)部分一般由轉(zhuǎn)子、定子、繞組、磁極等部件組成。電機(jī)的類型包括直流伺服電機(jī)、交流伺服電機(jī)、步進(jìn)伺服電機(jī)等,每種類型的電機(jī)在結(jié)構(gòu)和控制方式上都有所不同。
2023-03-07 15:14:586213 伺服電機(jī)是一種能夠精確控制運(yùn)動(dòng)的電機(jī),通常包括以下幾種類型:
直流伺服電機(jī):直流伺服電機(jī)是利用直流電作為輸入信號(hào),通過控制電流大小和方向來控制電機(jī)轉(zhuǎn)速和轉(zhuǎn)向的一種電機(jī)。直流伺服電機(jī)通常具有高速度和高精度的優(yōu)點(diǎn),廣泛應(yīng)用于工業(yè)自動(dòng)化領(lǐng)域。
2023-03-12 10:20:322577 交流伺服電機(jī)控制系統(tǒng)是什么?一般都是PLC,無論你想通過總線控制交流伺服電機(jī)還是通過脈沖控制交流伺服電機(jī),PLC都可以搞定。 PLC也叫可編程邏輯控制器,是通過數(shù)字量信號(hào)或模擬量信號(hào)實(shí)現(xiàn)自動(dòng)化
2023-03-16 12:10:02570 什么時(shí)候選用總線型伺服? 目前,PLC控制伺服電機(jī)的方式主要有兩種,第一種是脈沖控制,第二種是總線控制。那么,什么時(shí)候選用總線型伺服呢?簡(jiǎn)單來說說。 先說脈沖控制伺服,即PLC通過脈沖輸出IO連接
2023-03-17 15:40:021255 總之,PLC控制伺服電機(jī)正反轉(zhuǎn)的工作原理是通過編寫程序、檢測(cè)輸入信號(hào)、信號(hào)處理、控制輸出、反饋監(jiān)測(cè)等步驟來實(shí)現(xiàn)。
2023-03-22 17:40:097475 如果PLC在一分鐘內(nèi)發(fā)送10000個(gè)脈沖,那么伺服電機(jī)就以1r/min的速度走完一圈,如果在一秒鐘內(nèi)發(fā)送10000個(gè)脈沖,那么伺服電機(jī)就以60r/min的速度走完一圈。
2023-04-08 10:18:551369 通過模擬量的輸入或脈沖的頻率都可以進(jìn)行轉(zhuǎn)動(dòng)速度的控制,在有上位控制裝置的外環(huán)PID控制時(shí)速度模式也可以進(jìn)行定位,但必須把電機(jī)的位置信號(hào)或直接負(fù)載的位置信號(hào)給上位反饋以做運(yùn)算用。
2023-04-10 12:52:06639 在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的伺服控制,其實(shí)就是對(duì)伺服電機(jī)的位置控制。 其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-04-27 17:34:351116 
伺服電機(jī)是一個(gè)閉環(huán)系統(tǒng),它使用位置反饋來控制其運(yùn)動(dòng)和最終位置。伺服電機(jī)有多種類型,其主要特點(diǎn)是能夠精確控制其軸的位置。在工業(yè)型伺服電機(jī)中,位置反饋傳感器通常是高精度編碼器,而在較小的 RC 或業(yè)余
2023-05-06 10:08:212 通過模擬量的輸入或脈沖的頻率都可以進(jìn)行轉(zhuǎn)動(dòng)速度的控制,在有上位控制裝置的外環(huán)PID控制時(shí)速度模式也可以進(jìn)行定位,但必須把電機(jī)的位置信號(hào)或直接負(fù)載的位置信號(hào)給上位反饋以做運(yùn)算用。
2023-05-06 14:16:342153 
伺服電機(jī)是我們常用的一種電機(jī),在本文的案例中,將學(xué)習(xí)如何使用單片機(jī)控制伺服電機(jī),案例以PIC16F877A單片機(jī)作為接口的連接與控制示例。
2023-07-06 10:53:142785 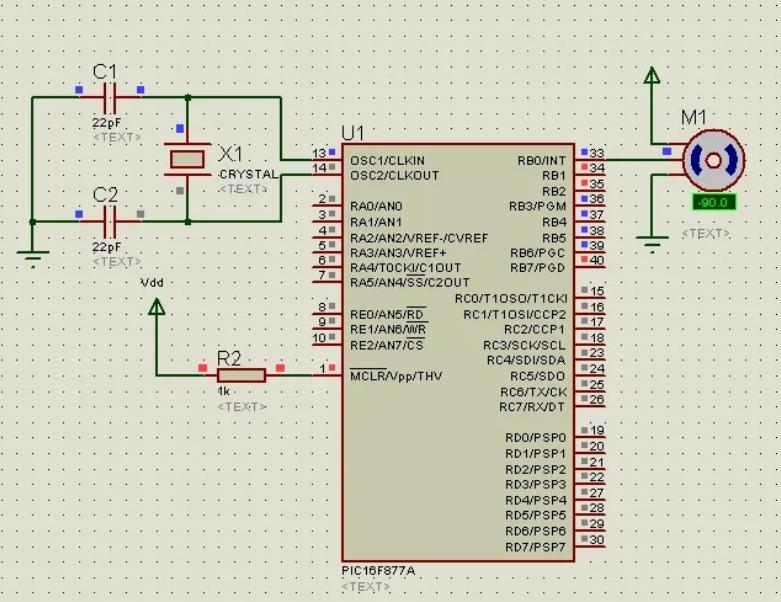
在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-09-08 11:22:48737 通過總線控制伺服電機(jī)時(shí),如何進(jìn)行回零(尋參考點(diǎn))控制?這里就CANOPEN伺服電機(jī)的回零控制方法分享給大家。
2023-10-23 11:42:201629 
伺服電機(jī)重要的應(yīng)用是定位控制。位置控制有兩個(gè)需要控制的物理量,即速度和位置。準(zhǔn)確地說,是控制伺服電機(jī)到達(dá)位置的速度和停止的速度。
2023-11-06 10:29:18332 PLC(可編程邏輯控制器)是一種常用于工業(yè)自動(dòng)化系統(tǒng)的控制器。伺服電機(jī)是一種具有高精度、高速度和高可靠性的電動(dòng)機(jī),可以用于實(shí)現(xiàn)精確控制和準(zhǔn)確位置的要求。在PLC中,我們可以使用不同的方法來控制伺服
2023-12-25 11:16:30815 什么是絕對(duì)脈沖和相對(duì)脈沖?有沒有PLC控制伺服電機(jī)的程序? 絕對(duì)脈沖和相對(duì)脈沖是在運(yùn)動(dòng)控制系統(tǒng)中用于編碼位置信息的兩種常見方式。 絕對(duì)脈沖是根據(jù)運(yùn)動(dòng)軸的實(shí)際位置而生成的脈沖信號(hào)。它提供了運(yùn)動(dòng)軸當(dāng)前
2024-02-05 17:39:47723
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論