電子產(chǎn)品的可靠性和能效會(huì)對(duì)世界各地及各種應(yīng)用的舒適性、便利性和環(huán)境產(chǎn)生影響。 一種提高電機(jī)驅(qū)動(dòng)系統(tǒng)能效的方法是,用變速驅(qū)動(dòng)器代替在50 / 60 Hz交流線路電壓下驅(qū)動(dòng)的單速電機(jī),從而實(shí)現(xiàn)電機(jī)的電子速度控制和更高的驅(qū)動(dòng)能效。與開(kāi)/關(guān)調(diào)節(jié)方法相比,變速控制還可以提
2020-12-17 14:42:46 2809
2809 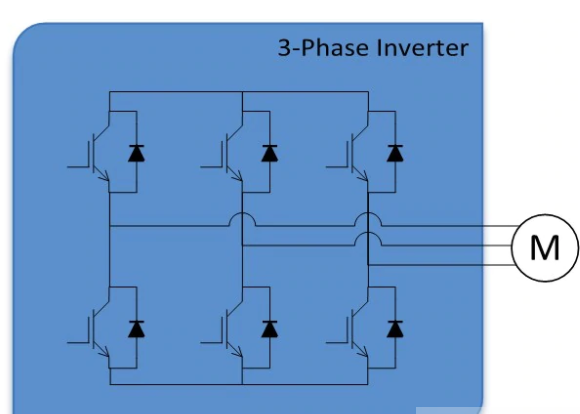
有什么方法可以驅(qū)動(dòng)無(wú)刷電機(jī)?有什么方法可以驅(qū)動(dòng)空心杯電機(jī)?驅(qū)動(dòng)無(wú)刷電機(jī)與驅(qū)動(dòng)空心杯電機(jī)有何不同?
2021-08-27 06:09:35
ModBus-RTU通信協(xié)議如何控制伺服電機(jī)?
2021-09-29 08:37:27
USS通信技術(shù)作為一種低成本的簡(jiǎn)單驅(qū)動(dòng)控制技術(shù),在工業(yè)現(xiàn)場(chǎng)有著廣泛的應(yīng)用。今天這篇文章,我們就和大家一起聊聊USS通信協(xié)議的基本內(nèi)容。
2021-01-19 06:45:32
本帖最后由 mr.pengyongche 于 2013-4-30 02:57 編輯
dsp無(wú)線通信電臺(tái)的通信協(xié)議研究摘 要:通信協(xié)議是通信系統(tǒng)在通信鏈路上實(shí)現(xiàn)復(fù)雜任務(wù)的軟件構(gòu)架及程序編寫(xiě)規(guī)則
2013-02-19 15:27:54
以及與系統(tǒng)服務(wù)相關(guān)的看門(mén)狗、定時(shí)器等;另外還包含與數(shù)據(jù)通信相關(guān)的通信協(xié)議的設(shè)計(jì)等。本文以英飛凌 AURIX 系列三核單片機(jī) TC297 為硬件開(kāi)發(fā)平臺(tái),基于英飛凌底層驅(qū)動(dòng)軟件對(duì)系統(tǒng)基礎(chǔ)軟件層進(jìn)行相關(guān)開(kāi)發(fā)
2019-07-27 08:00:00
通訊協(xié)議是指什么?在STM32中的通信協(xié)議該怎樣去優(yōu)化呢?
2021-11-23 07:02:14
我在哪里可以找到串行端口通信協(xié)議規(guī)范,這樣我就可以通過(guò) uart 控制電機(jī),而無(wú)需使用 ST 電機(jī)控制工作臺(tái)?
2023-01-16 08:15:38
了四種基本類(lèi)型,以整合各種可能的電機(jī)控制架構(gòu)1區(qū):配置說(shuō)明*以直流電軌為基準(zhǔn)的控制器*低邊分流檢測(cè)(*低速通信協(xié)議 – 易于隔離典型應(yīng)用:逆變器2區(qū):配置說(shuō)明*以直流電軌為基準(zhǔn)的控制器*基于傳感器
2018-10-31 10:25:02
基于NBIoT通信協(xié)議的電流采集系統(tǒng)的主要組成部分有哪些?基于NBIoT通信協(xié)議的電流采集系統(tǒng)該如何去設(shè)計(jì)?
2021-06-27 06:26:49
常見(jiàn)的通信協(xié)議格式是什么?如何實(shí)現(xiàn)基礎(chǔ)通信協(xié)議的設(shè)計(jì)?
2022-02-14 07:35:37
如何應(yīng)用mavlink通信協(xié)議?
2021-12-20 06:30:21
永磁電機(jī)驅(qū)動(dòng)系統(tǒng)具有以下特點(diǎn):
2021-01-26 06:19:38
正在尋找 Motor Work Bench 通信協(xié)議文檔,因?yàn)槲覀兿胧褂?STSPIN32F0 控制多個(gè)電機(jī),因此我無(wú)法使用 Motor COntrol Work Bench
2023-01-29 06:41:10
、控制和反饋信號(hào)隔離? 精確測(cè)量電機(jī)電流和電壓信號(hào)? 用于控制信號(hào)的高速接口,以便控制器能夠快速響應(yīng)? 工業(yè)以太網(wǎng)高速接口適用于PROFINET、EtherCAT和Powerlink等通信協(xié)議? 通過(guò)
2018-10-25 10:19:53
車(chē)載充電機(jī)和非車(chē)載充電機(jī)與BMS之間的通信協(xié)議有差別嗎?
2014-11-03 15:42:51
)崗位職責(zé):1、負(fù)責(zé)通信協(xié)議棧的架構(gòu)設(shè)計(jì)、軟件開(kāi)發(fā)、系統(tǒng)集成與測(cè)試;2、負(fù)責(zé)相關(guān)軟件項(xiàng)目的管理,確保項(xiàng)目的交付質(zhì)量;任職條件:1、3年以上通信協(xié)議棧、底層驅(qū)動(dòng)等工作經(jīng)驗(yàn);2、精通C/C++,了解
2014-07-09 17:36:58
提出了利用自由通信協(xié)議,以P“ 作為主站,通過(guò)RS一485總線與多臺(tái)變頻器申行通信構(gòu)成的變頻同步控制系統(tǒng)。介紹了系統(tǒng)的硬件構(gòu)成,根據(jù)Pl刀與變頻器之間的通信原理和通信協(xié)議
2009-03-18 09:29:12 11
11 本文設(shè)計(jì)了一個(gè)五相步進(jìn)電機(jī)全數(shù)字恒流驅(qū)動(dòng)系統(tǒng)。
2009-04-02 15:09:4332 MOTEC 步進(jìn)電機(jī)及驅(qū)動(dòng)器:德國(guó)MOTEC公司多年以來(lái)一直致力于步進(jìn)電機(jī)及驅(qū)動(dòng)器的研究、開(kāi)發(fā)、生產(chǎn)工作,是世界上步進(jìn)驅(qū)動(dòng)系統(tǒng)行業(yè)的領(lǐng)先者。該公司生產(chǎn)的兩項(xiàng)混合式步進(jìn)電機(jī)正弦
2010-01-09 10:21:5955 闡述了步進(jìn)電機(jī)的驅(qū)動(dòng)原理,介紹了恒流斬波、脈寬調(diào)制及細(xì)分驅(qū)動(dòng)等步進(jìn)電機(jī)驅(qū)動(dòng)電路的結(jié)構(gòu)設(shè)計(jì)方法和設(shè)計(jì)中的相關(guān)技術(shù),并給出了實(shí)現(xiàn)方案。關(guān)鍵詞:步進(jìn)電機(jī); 恒流斬波; 脈
2010-01-09 13:41:4999 二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的優(yōu)化設(shè)計(jì):從 改善步進(jìn)電機(jī)動(dòng)靜態(tài)性能的角度出發(fā),給出了基于8051的二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的優(yōu)化設(shè)計(jì)方案,主要介紹了系統(tǒng)結(jié)構(gòu)、通訊策略、
2010-01-14 09:44:21100 主要討論了利用霍爾元件在無(wú)刷電機(jī)控制系統(tǒng)中使用的問(wèn)題,并對(duì)利用霍爾集成傳感器進(jìn)行了探討。關(guān)鍵詞:霍爾元件 無(wú)刷電機(jī) 驅(qū)動(dòng)
2010-08-30 16:02:20189 四相步進(jìn)電機(jī)驅(qū)動(dòng)電路和驅(qū)動(dòng)程序
步進(jìn)電機(jī)驅(qū)動(dòng)器系統(tǒng)電路原理圖
2008-10-21 00:42:206696 
基于89C2051的步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
設(shè)計(jì)了一種基于89C2051單片機(jī)的步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)。該系統(tǒng)優(yōu)化了電機(jī)在不同
2009-09-17 15:06:451258 
壓電電機(jī)驅(qū)動(dòng)電路
這個(gè)壓電機(jī)
2009-09-26 16:29:25839 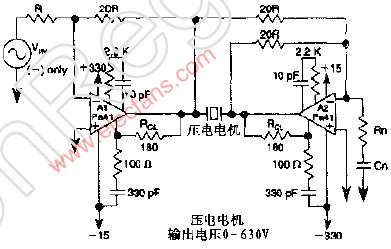
本文敘述基于ARM的EPA通信協(xié)議棧優(yōu)化技術(shù)的研究與實(shí)現(xiàn)的案例分析。
2011-10-13 16:48:3432 Modbus通信協(xié)議教程Modbus通信協(xié)議教程Modbus通信協(xié)議教程
2015-12-08 14:14:3169 H橋電機(jī)驅(qū)動(dòng)相關(guān)資料,PWM驅(qū)動(dòng)直流電機(jī)
2015-12-08 16:58:1741 電機(jī)驅(qū)動(dòng)&&舵機(jī)驅(qū)動(dòng)。
2016-03-21 11:52:3026 步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)初探,有需要的下來(lái)看看
2016-04-25 10:10:0739 二相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器的優(yōu)化設(shè)計(jì),下來(lái)看看
2016-04-25 10:40:3622 基于89C2051的步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
2016-04-25 10:40:3614 A4988電機(jī)驅(qū)動(dòng)的詳細(xì)資料,電機(jī)驅(qū)動(dòng)模塊的使用說(shuō)明。
2016-05-03 11:44:020 電機(jī)驅(qū)動(dòng)系統(tǒng)電機(jī)端共模電壓的研究,下來(lái)看看
2016-05-04 14:37:015 微型超聲電機(jī)驅(qū)動(dòng)及其優(yōu)化研究,下來(lái)看看。
2016-05-04 15:18:3816 一種直流無(wú)刷電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì)與優(yōu)化,下來(lái)看看
2016-05-05 13:45:0633 電動(dòng)汽車(chē)非車(chē)載傳導(dǎo)式充電機(jī)與電池管理系統(tǒng)之間的通信協(xié)議
2016-07-15 17:21:2658 一種直流無(wú)刷電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì)和優(yōu)化
2017-01-04 15:30:0419 雙電機(jī)驅(qū)動(dòng)機(jī)床進(jìn)給系統(tǒng)消隙控制_任海鵬
2017-01-07 18:12:511 永磁驅(qū)動(dòng)電機(jī)接線盒結(jié)構(gòu)優(yōu)化熱性能分析_丁樹(shù)業(yè)
2017-01-08 13:49:170 電機(jī)驅(qū)動(dòng)板
2017-02-28 15:24:2035 就像每個(gè)MOSFET需要一個(gè)柵極驅(qū)動(dòng)器來(lái)切換它,每個(gè)電機(jī)后面總是有一個(gè)驅(qū)動(dòng)力。根據(jù)復(fù)雜程度和系統(tǒng)成本、尺寸和性能要求,驅(qū)動(dòng)電機(jī)的方式多樣。
2017-04-12 10:58:391763 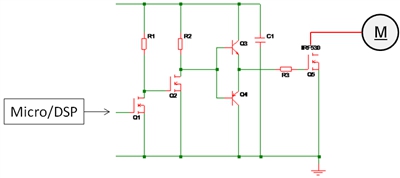
科爾摩根伺服驅(qū)動(dòng)器串口通信協(xié)議
2017-09-03 09:30:1124 本文檔內(nèi)容介紹了基于步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)建模,供參考
2018-03-02 14:08:2714 本文介紹了步進(jìn)電機(jī)的控制驅(qū)動(dòng)原理和東芝的電機(jī)驅(qū)動(dòng)器,以及電機(jī)驅(qū)動(dòng)的安全技術(shù)。
2018-07-24 08:48:4122835 ?? 七特步進(jìn)電機(jī)驅(qū)動(dòng)器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(稱為“步距角”),它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行
2018-11-21 15:32:401425 通過(guò)電機(jī)驅(qū)動(dòng)模塊控制驅(qū)動(dòng)電機(jī)兩端電壓來(lái)對(duì)電機(jī)進(jìn)行制動(dòng),我們可以采用飛思卡爾半導(dǎo)體公司的集成橋式驅(qū)動(dòng)芯片MC33886。
2019-10-19 09:29:0151982 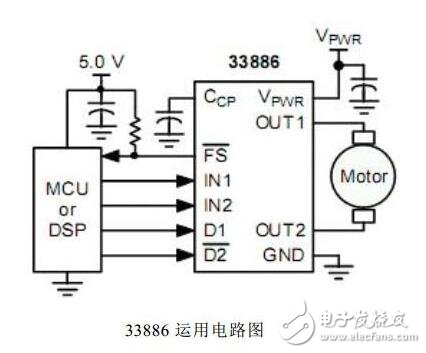
小體積有刷直流電機(jī)驅(qū)動(dòng),單路,輸入電壓6-36V,峰值電流3.6A,持續(xù)電流2A。板載STM32F042G6U6單片機(jī),可通過(guò)單片機(jī)程序控制電機(jī),也可自定義通信協(xié)議,通過(guò)CAN總線或UART控制
2020-12-25 15:26:043019 作為有刷電機(jī)驅(qū)動(dòng)方法的最后一篇文章,本文將介紹通過(guò)有刷電機(jī)“單開(kāi)關(guān)電路”和“半橋電路”進(jìn)行驅(qū)動(dòng)的方法。兩種方法均適用直流驅(qū)動(dòng)和PWM驅(qū)動(dòng)。
2021-05-02 10:02:006132 
開(kāi)關(guān)磁阻電機(jī)電驅(qū)動(dòng)系統(tǒng)。
2021-05-19 14:42:5833 在當(dāng)今生活中,電機(jī)無(wú)處不在。大到飛機(jī)裝甲,小到電動(dòng)玩具,我們都能在其中發(fā)現(xiàn)電機(jī)的身影。那么,電機(jī)是如何驅(qū)動(dòng)的呢? 以有刷電機(jī)為例,有刷電機(jī)有兩種驅(qū)動(dòng)方式 ①利用分立元件的搭建來(lái)實(shí)現(xiàn),優(yōu)勢(shì)是成本低
2021-06-13 18:10:006587 在電機(jī)驅(qū)動(dòng)的樓宇自動(dòng)化和電網(wǎng)基礎(chǔ)設(shè)施應(yīng)用(例如智能電表、智能鎖、互聯(lián)網(wǎng)協(xié)議(IP)網(wǎng)絡(luò)攝像頭和可視門(mén)鈴)中,有多種設(shè)計(jì)低壓系統(tǒng)的方法。
2021-06-17 09:45:001813 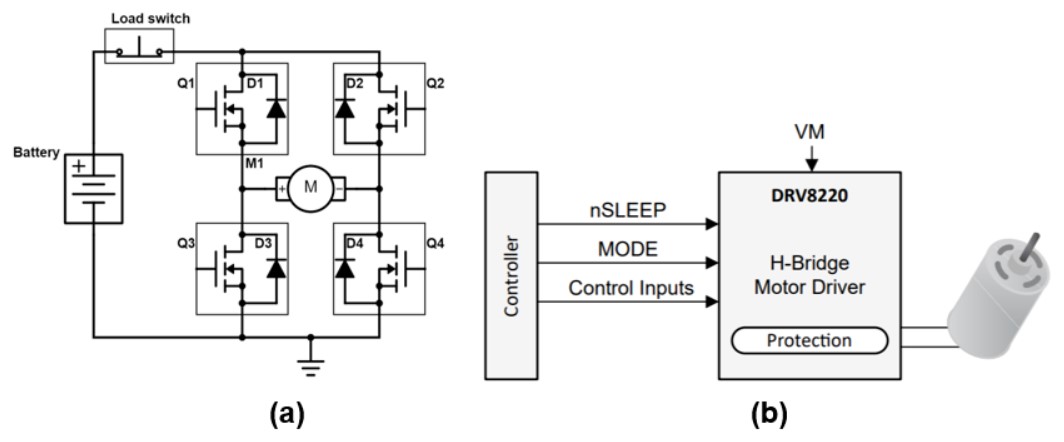
什么是電機(jī)驅(qū)動(dòng)芯片和電機(jī)驅(qū)動(dòng)模塊? 電機(jī)驅(qū)動(dòng)芯片是集成有CMOS 控制電路和DMOS 功率器件的芯片,利用它可以與主處理器、電機(jī)和增量型編碼器構(gòu)成一個(gè)完整的運(yùn)動(dòng)控制系統(tǒng)。可以用來(lái)驅(qū)動(dòng)直流電機(jī)、步進(jìn)
2021-07-18 14:46:4415361 GBT 27930-2015 電動(dòng)汽車(chē)非車(chē)載傳導(dǎo)式 充電機(jī)與電池管理 系統(tǒng)之間的通信協(xié)議資料分享。
2022-07-26 16:00:2017 根據(jù)車(chē)輛使用的電機(jī)數(shù)量及其配置,目前電動(dòng)汽車(chē)的驅(qū)動(dòng)系統(tǒng)被分為單電機(jī)集中驅(qū)動(dòng)和多電機(jī)分布驅(qū)動(dòng)兩類(lèi)。什么是單電機(jī)集中驅(qū)動(dòng)呢?什么是多電機(jī)分布驅(qū)動(dòng)呢?
2022-10-26 15:45:133542 如何優(yōu)化48V輕混電動(dòng)車(chē)(MHEV)的電機(jī)驅(qū)動(dòng)器設(shè)計(jì)
2022-10-28 12:00:195 本文將探討電機(jī)驅(qū)動(dòng)器IC的功耗。曾有人問(wèn),是否可以用下面的公式計(jì)算電機(jī)驅(qū)動(dòng)器IC的功耗。(IC電路電流+流過(guò)電機(jī)的電流)×電源電壓乍一看貌似沒(méi)問(wèn)題,但實(shí)際上是不正確的。
2023-02-15 16:12:06712 
本文將介紹在各領(lǐng)域中使用了什么馬達(dá)電機(jī)驅(qū)動(dòng)系統(tǒng)及馬達(dá)電機(jī)驅(qū)動(dòng)系統(tǒng)概述。各領(lǐng)域的電機(jī)驅(qū)動(dòng)系統(tǒng)概述:應(yīng)用領(lǐng)域或應(yīng)用產(chǎn)品不同,所使用的馬達(dá)電機(jī)驅(qū)動(dòng)系統(tǒng)也不相同。
2023-02-24 18:25:08699 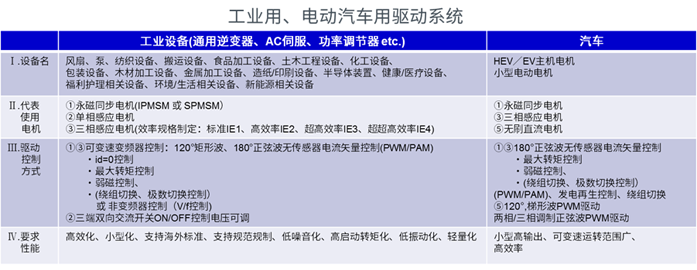
本文將對(duì)上一篇文章中提到的在“電機(jī)驅(qū)動(dòng)”基礎(chǔ)篇中重點(diǎn)介紹的小型馬達(dá)電機(jī)的“有刷直流電機(jī)”、“無(wú)刷直流電機(jī)”及“步進(jìn)電機(jī)”的結(jié)構(gòu)概要進(jìn)行說(shuō)明。
2023-02-23 16:51:451220 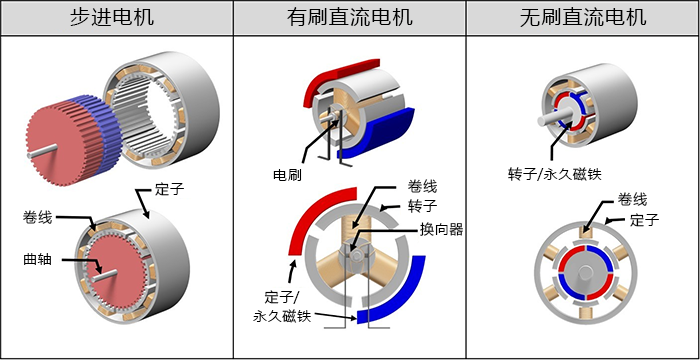
兩相雙極步進(jìn)電機(jī)的驅(qū)動(dòng):驅(qū)動(dòng)電路,先來(lái)看兩相雙極驅(qū)動(dòng)電路的基本框圖示例。可使用雙通道的H橋驅(qū)動(dòng)電路來(lái)驅(qū)動(dòng)兩相雙極步進(jìn)電機(jī)。
2023-02-24 09:51:111306 
在上一篇文章“兩相雙極步進(jìn)電機(jī)的驅(qū)動(dòng) 其1”中,給出了兩相雙極步進(jìn)電機(jī)的基本驅(qū)動(dòng)電路示例和驅(qū)動(dòng)波形。此次“兩相雙極步進(jìn)電機(jī)的驅(qū)動(dòng) 其2”篇,將介紹驅(qū)動(dòng)兩相雙極步進(jìn)電機(jī)過(guò)程中電流再生時(shí)的Decay:電流衰減。
2023-02-24 09:51:111396 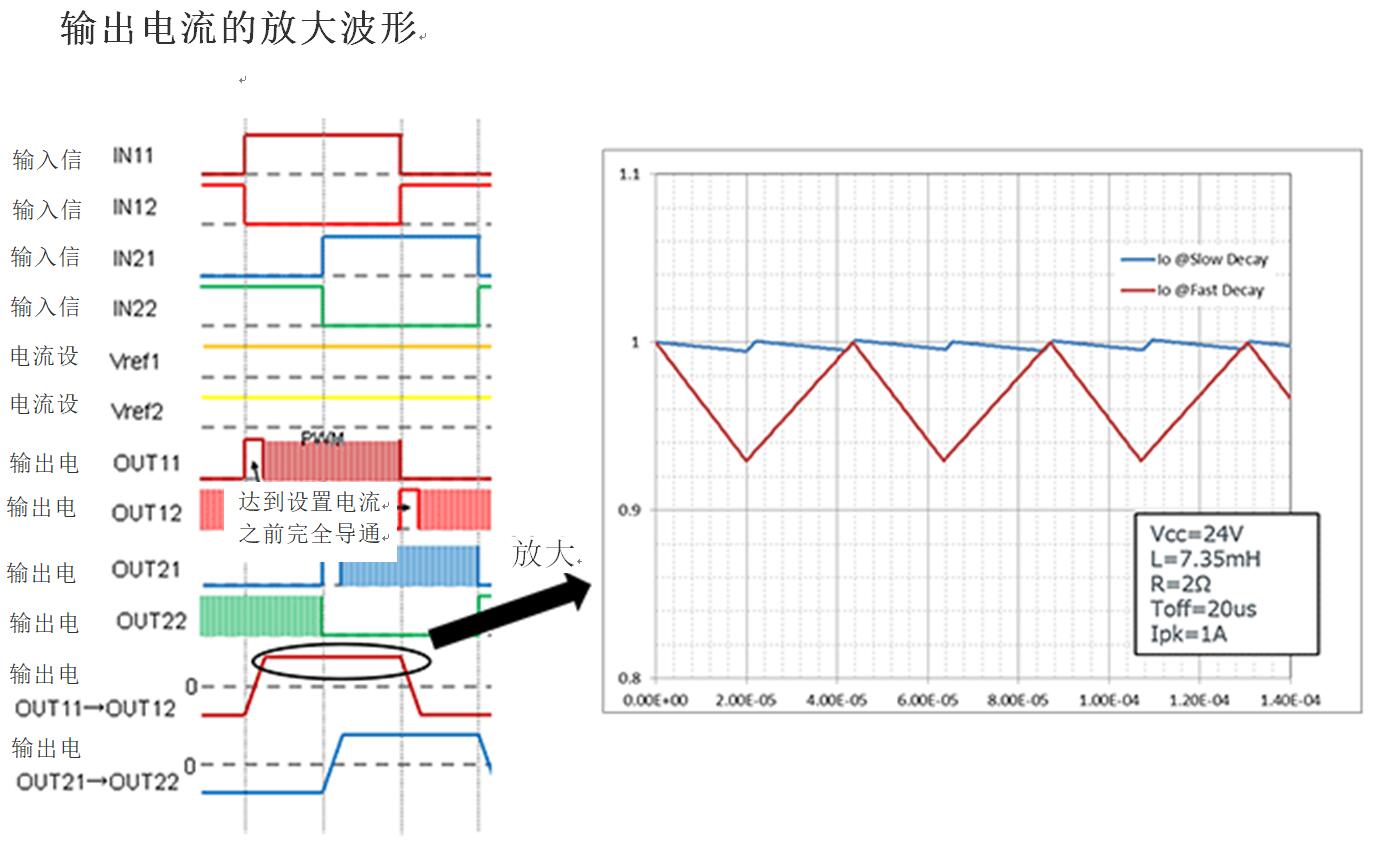
電機(jī)的典型驅(qū)動(dòng)方法包括電壓驅(qū)動(dòng)、電流驅(qū)動(dòng)以及PWM驅(qū)動(dòng)。本文將介紹采用PWM驅(qū)動(dòng)方式的恒流工作。首先介紹的是什么是PWM驅(qū)動(dòng)的電機(jī)恒流工作,其次是PWM驅(qū)動(dòng)電機(jī)恒流工作時(shí)電路的工作原理。
2023-02-24 09:51:121106 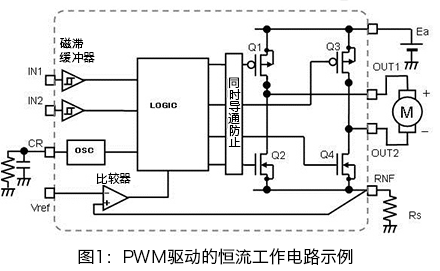
了解工業(yè)直接驅(qū)動(dòng)伺服電機(jī)技術(shù),有助于在各種應(yīng)用中更好地應(yīng)用伺服電機(jī)。什么是直接驅(qū)動(dòng)電機(jī)?何時(shí)使用直接驅(qū)動(dòng)電機(jī),可以提供比基于傳動(dòng)的替代方案更好的性能指標(biāo)?
2023-03-03 18:11:441126 步進(jìn)電機(jī)驅(qū)動(dòng)器是一種電子設(shè)備,用于控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)和運(yùn)動(dòng),其主要原理是將控制信號(hào)轉(zhuǎn)換為電機(jī)的驅(qū)動(dòng)信號(hào)。
2023-03-08 14:30:532613 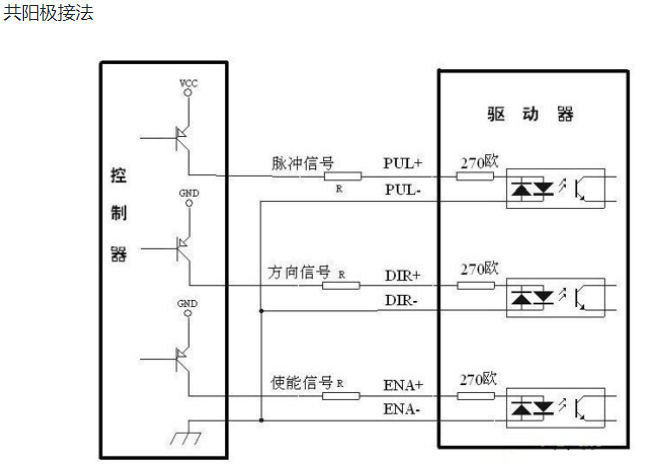
步進(jìn)電機(jī)是一種特殊的電機(jī),可以通過(guò)輸入脈沖信號(hào)來(lái)控制它的位置和運(yùn)動(dòng)。步進(jìn)電機(jī)通常由電機(jī)本體和驅(qū)動(dòng)電路組成,驅(qū)動(dòng)電路負(fù)責(zé)將輸入的脈沖信號(hào)轉(zhuǎn)換為電機(jī)的運(yùn)動(dòng)控制信號(hào)。
2023-03-08 14:33:332951 在本文中,我們將解釋方波驅(qū)動(dòng)和正弦波驅(qū)動(dòng)這兩種驅(qū)動(dòng)系統(tǒng)如何影響電機(jī)扭矩性能。
2023-03-09 15:16:291765 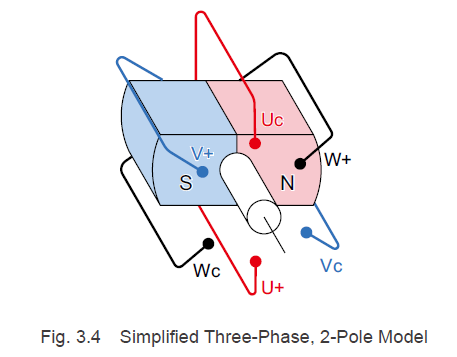
驅(qū)動(dòng)系統(tǒng)與無(wú)刷電機(jī)的特性有著密切的關(guān)系,人們已經(jīng)采用各種方法來(lái)改善電機(jī)的可控性和特性。在本文中,我們將解釋兩種典型的驅(qū)動(dòng)系統(tǒng):方波驅(qū)動(dòng)和正弦波驅(qū)動(dòng)。
2023-03-09 15:16:291352 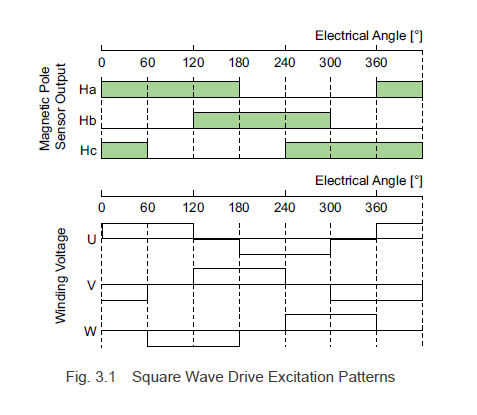
電機(jī)的典型驅(qū)動(dòng)方法包括電壓驅(qū)動(dòng)、電流驅(qū)動(dòng)以及PWM驅(qū)動(dòng)。本文將介紹采用PWM驅(qū)動(dòng)方式的恒流工作。首先介紹的是什么是PWM驅(qū)動(dòng)的電機(jī)恒流工作,其次是PWM驅(qū)動(dòng)電機(jī)恒流工作時(shí)電路的工作原理。
2023-03-13 09:09:131313 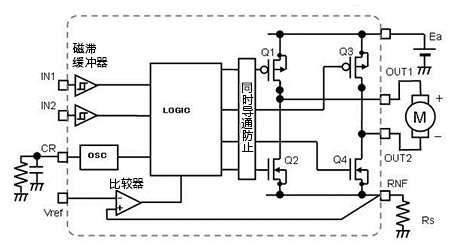
用來(lái)使電機(jī)旋轉(zhuǎn)(驅(qū)動(dòng)電機(jī))的集成電路(IC)通常被稱為“電機(jī)驅(qū)動(dòng)器IC”或“電機(jī)驅(qū)動(dòng)IC”,在某些情況下還會(huì)被稱為“電機(jī)驅(qū)動(dòng)器”。市場(chǎng)上的電機(jī)驅(qū)動(dòng)器IC種類(lèi)非常多。
2023-03-13 09:17:091341 文章目錄 1. 基本原理 1.1 控制電機(jī)轉(zhuǎn)速 1.2 控制電機(jī)旋轉(zhuǎn)方向2. H橋驅(qū)動(dòng) 2.1 `H橋驅(qū)動(dòng)`名稱的由來(lái) 2.2 H橋驅(qū)動(dòng)控制電機(jī)旋轉(zhuǎn)方向 2.3 H橋驅(qū)動(dòng)3. 電機(jī)驅(qū)動(dòng)模塊 3.1
2023-03-16 09:28:441 樹(shù)莓派驅(qū)動(dòng)電機(jī) 設(shè)備: 1.樹(shù)莓派3b+2.若干杜邦線3.電機(jī)驅(qū)動(dòng)模塊tb6612fng4.電機(jī)5.充電寶和usb線6.連接式的DC公母頭(可有可無(wú))7.電烙鐵 使用電機(jī)驅(qū)動(dòng)模塊原因 樹(shù)莓派的引腳
2023-03-17 14:39:341 驅(qū)動(dòng)電機(jī)系統(tǒng)由驅(qū)動(dòng)電機(jī)、驅(qū)動(dòng)電機(jī)控制器(MCU)構(gòu)成,通過(guò)高低壓線束、冷卻管路與整車(chē)其他系統(tǒng)連接。
整車(chē)控制器(VCU)根據(jù)加速踏板、制動(dòng)踏板、擋位等信號(hào)通過(guò)CAN網(wǎng)絡(luò)向電機(jī)控制器MCU發(fā)送指令
2023-03-17 15:38:351 本章介紹步進(jìn)電機(jī)的主要驅(qū)動(dòng)方式和控制方法。步進(jìn)電機(jī)性能除了電機(jī)本體外,還會(huì)根據(jù)驅(qū)動(dòng)方式和控制方法不同而受到很大影響。選擇步進(jìn)電機(jī)的時(shí)候,同時(shí)要著重考慮驅(qū)動(dòng)方式和控制方法。
2023-03-20 10:52:305 電機(jī)驅(qū)動(dòng)系統(tǒng)MCU拆解分析,驅(qū)動(dòng)板主要包括驅(qū)動(dòng)電源電路;驅(qū)動(dòng)電路;鉗位電路設(shè)計(jì);短路保護(hù)電路;推挽電路等,以及母線電壓、溫度信號(hào)采集電路。
2023-05-09 14:52:481697 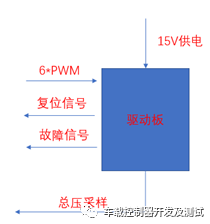
?直流無(wú)刷電機(jī) 【自制FOC驅(qū)動(dòng)器】深入淺出講解FOC算法與SVPWM技術(shù) | 稚暉的個(gè)人站 ? ? 寫(xiě)得很清晰機(jī)器人硬件三大核心部件( 電機(jī) 、 減速器 、 驅(qū)動(dòng)器 ) 照這樣看來(lái),直流電機(jī)驅(qū)動(dòng)
2023-05-16 15:13:0222 電機(jī)和驅(qū)動(dòng)器簡(jiǎn)介一般性區(qū)別:有刷電機(jī)一般只需兩根接線端子就可以驅(qū)動(dòng),而無(wú)刷電機(jī)需要三根接線端子進(jìn)行驅(qū)動(dòng)。
2023-05-16 14:54:2732 ? ? ? ? ?? 峰岹[tiáo]科技 成立于2010年,是一家專業(yè)的 電機(jī)驅(qū)動(dòng)芯片 半導(dǎo)體公司,致力為各種電機(jī)系統(tǒng)提供高質(zhì)量的 驅(qū)動(dòng)和控制 芯片,及電機(jī)技術(shù)的咨詢服務(wù)。我們提供的芯片應(yīng)用領(lǐng)域涵蓋 工業(yè)設(shè)備、運(yùn)動(dòng)控制、電動(dòng)工具、消費(fèi)電子、智能機(jī)器人、IT及通信 等驅(qū)動(dòng)控制領(lǐng)域。 ? ?
2022-04-16 15:09:02465 
雙電機(jī)驅(qū)動(dòng)是指在一個(gè)系統(tǒng)中安裝了兩個(gè)電機(jī),并采取不同方案進(jìn)行驅(qū)動(dòng),從而達(dá)到更高的效率和更好的控制。雙電機(jī)驅(qū)動(dòng)的原理與單電機(jī)驅(qū)動(dòng)相同,只是多了一組電機(jī)和控制器。雙電機(jī)驅(qū)動(dòng)的優(yōu)點(diǎn)在于可以實(shí)現(xiàn)更高的功率、更高的效率和更好的控制。
2023-08-28 11:36:361468 
的基本原理、應(yīng)用領(lǐng)域、分類(lèi)及其優(yōu)劣勢(shì)等,詳細(xì)探討其優(yōu)點(diǎn)和缺點(diǎn),以幫助人們更好地了解該電路的性能和特點(diǎn)。 一、基本原理 直流有刷電機(jī)驅(qū)動(dòng)電路包括兩個(gè)部分:電機(jī)驅(qū)動(dòng)器和電源控制器。電機(jī)驅(qū)動(dòng)器用于控制電機(jī)的速度和方向,而電
2023-08-29 10:06:471414 電子發(fā)燒友網(wǎng)站提供《單片機(jī)電機(jī)控制系統(tǒng)之H橋式電機(jī)驅(qū)動(dòng)電路原理.doc》資料免費(fèi)下載
2023-10-09 15:50:5412 熟悉Trinamic產(chǎn)品的客戶,經(jīng)常會(huì)有這樣的問(wèn)題:–Trinamic的步進(jìn)和伺服芯片性能很好,有沒(méi)有其他類(lèi)型電機(jī)的驅(qū)動(dòng)芯片?–我們有自己的步進(jìn)驅(qū)動(dòng)算法,Trinamic集成的算法我們用不上,是否
2023-10-21 08:11:25566 
GBT 27930-2015《電動(dòng)汽車(chē)非車(chē)載傳導(dǎo)式充電機(jī)與電池管理系統(tǒng)之間的通信協(xié)議》
2023-10-23 16:26:061 電子發(fā)燒友網(wǎng)站提供《基于Modbus RTU通信協(xié)議的伺服電機(jī)聯(lián)動(dòng)控制系統(tǒng)設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-25 09:50:292 直接驅(qū)動(dòng)電機(jī)的轉(zhuǎn)速-扭矩曲線與伺服電機(jī)很像,減速比在 10:1 左右,有時(shí)可高達(dá) 100:1。圖2顯示了適合齒輪伺服電機(jī)或直接驅(qū)動(dòng)電機(jī)應(yīng)用的轉(zhuǎn)速-扭矩曲線以及RMS和峰值運(yùn)行點(diǎn)。在本例中,兩個(gè)系統(tǒng)均可提供高達(dá)約28 Nm的扭矩,在峰值扭矩達(dá)到50 Nm時(shí),其最高轉(zhuǎn)速剛好超過(guò)100 RPM。
2023-10-29 11:10:39322 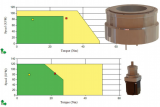
電機(jī)是將電能轉(zhuǎn)換為機(jī)械能的裝置。它還可以被視為將能量從電源傳輸?shù)綑C(jī)械負(fù)載的裝置。電機(jī)所在并使其旋轉(zhuǎn)的系統(tǒng)稱為驅(qū)動(dòng)器,也稱為電力驅(qū)動(dòng)器或電機(jī)驅(qū)動(dòng)器。每種電機(jī)驅(qū)動(dòng)器都具有獨(dú)特的特性,適用于不同的應(yīng)用和性能需求。選擇適當(dāng)?shù)?b class="flag-6" style="color: red">電機(jī)驅(qū)動(dòng)器對(duì)于確保交通工具的性能和效率至關(guān)重要。
2023-11-04 11:30:00353 
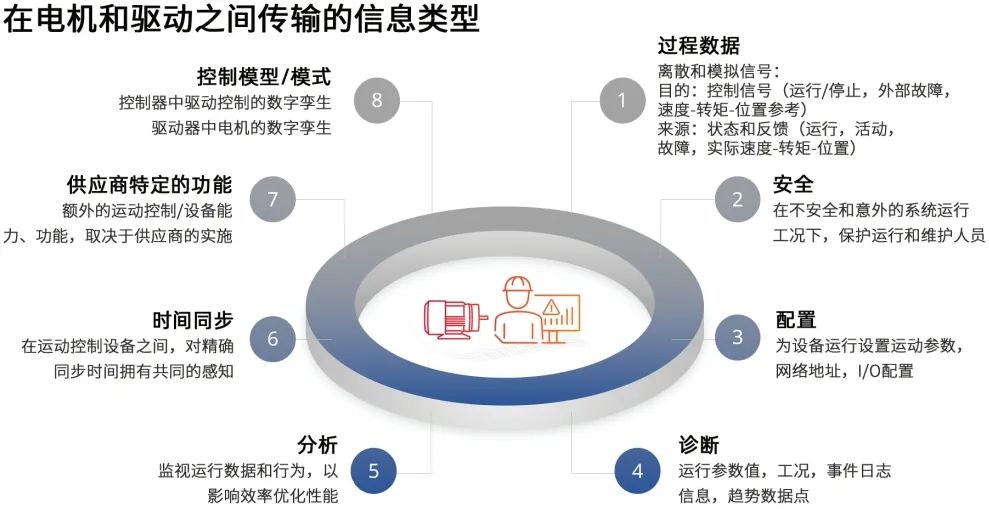
設(shè)計(jì)和部署電機(jī)驅(qū)動(dòng)系統(tǒng)有助于提高自動(dòng)化效率,并為生產(chǎn)過(guò)程的關(guān)鍵部件提供信息。電機(jī)和驅(qū)動(dòng)裝置之間以及其它設(shè)備和系統(tǒng)之間的工業(yè)通信通常采用基于標(biāo)準(zhǔn)的協(xié)議。
2023-11-10 10:11:18183 
步進(jìn)電機(jī)驅(qū)動(dòng)器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,這個(gè)固定的角度被稱為“步距角”。步進(jìn)電機(jī)不能直接接到直流或交流電
2023-11-14 08:07:32928 
電機(jī)驅(qū)動(dòng)電路的工作原理 電機(jī)驅(qū)動(dòng)電路是控制電機(jī)運(yùn)行的核心部分,其工作原理涉及到電機(jī)的運(yùn)行和控制。本文將詳細(xì)介紹電機(jī)驅(qū)動(dòng)電路的工作原理,包括電路的組成、工作過(guò)程和重要參數(shù)。 一、電機(jī)驅(qū)動(dòng)電路的組成
2023-12-13 10:54:371540 輪邊電機(jī)驅(qū)動(dòng)系統(tǒng)是一種電動(dòng)汽車(chē)的驅(qū)動(dòng)方式,它通過(guò)將電動(dòng)機(jī)直接安裝在車(chē)輪上,實(shí)現(xiàn)對(duì)車(chē)輛動(dòng)力的直接控制。與傳統(tǒng)的中央電機(jī)驅(qū)動(dòng)系統(tǒng)相比,輪邊電機(jī)驅(qū)動(dòng)系統(tǒng)具有更高的靈活性和效率。本文將對(duì)輪邊電機(jī)驅(qū)動(dòng)系統(tǒng)
2024-01-05 17:55:51526 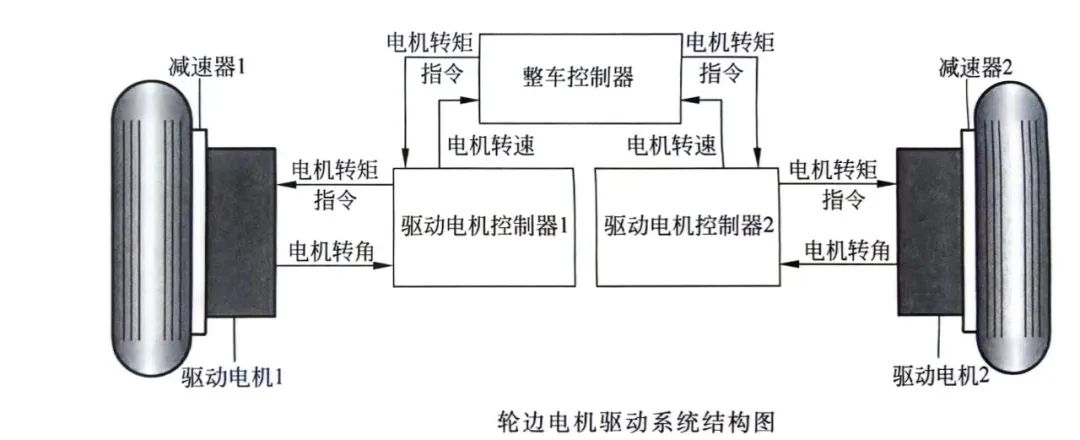
步進(jìn)電機(jī)驅(qū)動(dòng)器是一種常見(jiàn)的電機(jī)驅(qū)動(dòng)裝置,可用于控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)。調(diào)整步進(jìn)電機(jī)驅(qū)動(dòng)器的撥碼開(kāi)關(guān)可以改變其工作模式和參數(shù)設(shè)置,以滿足不同的應(yīng)用需求。下面是一個(gè)詳細(xì)解釋如何調(diào)整步進(jìn)電機(jī)驅(qū)動(dòng)器撥碼開(kāi)關(guān)
2024-01-15 13:56:45738 電驅(qū)動(dòng)系統(tǒng)由驅(qū)動(dòng)電機(jī)、電機(jī)控制器和減速器三個(gè)部分組成(圖1、圖2)。在車(chē)輛行駛過(guò)程中,驅(qū)動(dòng)電機(jī)通過(guò)來(lái)自動(dòng)力蓄電池的電能產(chǎn)生驅(qū)動(dòng)力,并在減速過(guò)程中將車(chē)輛動(dòng)能產(chǎn)生的電能為動(dòng)力蓄電池充電。
2024-01-22 10:41:28279 
電路原理 步進(jìn)電機(jī)是一種開(kāi)環(huán)控制系統(tǒng),通過(guò)不同的脈沖信號(hào)控制轉(zhuǎn)子旋轉(zhuǎn)的一種電機(jī)。步進(jìn)電機(jī)驅(qū)動(dòng)電路主要由電源、脈沖發(fā)生器、電流放大器和MOSFET等元件組成。下面將逐步介紹各個(gè)部分的原理。 電源:供應(yīng)電流和電壓給步進(jìn)電機(jī)
2024-01-24 10:46:14480
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論