 電子發燒友App
電子發燒友App


??預計到2025?年全球3D?視覺感知市場規模達到150?億美元,年復合增長率(CAGR)達?20%
??發源于工業,3D視覺技術快速迭代。
1)3D視覺感知技術最早被用于工業領域的測量和掃描。在技術剛剛誕生時,主要被用于工業設備和零部件的高精度三維測量、物體和材料的微小形變測量等。在多家公司的積極推廣下,3D視覺感知技術快速發展,在過去10?年內初步實現了從工業往消費電子領域延申的變革。
2)3D視覺目前主要有四種技術路線:激光三角測量、結構光、飛行時間(ToF)、多目視覺等是 3D 視覺目前主要的幾種技術路線。幾種技術路線的不同之處主要在于發射紅外光獲取數據的方式不同。
??應用領域持續拓展,打開3D 視覺廣闊空間。
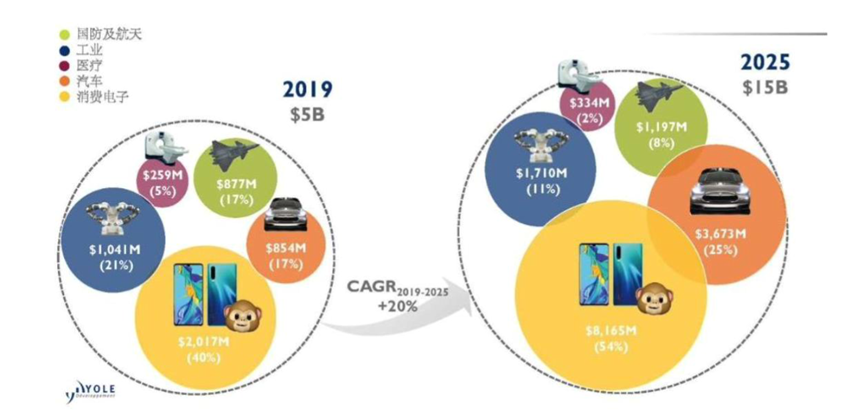
1)據Yole Devolopement預測,全球3D視覺感知市場規模在2025年將達到150?億美元,CAGR達 20%。
2)目前,3D視覺技術的主要下游行業主要包括消費電子、汽車(自動駕駛與智能座艙)、鋰電、半導體、AIOT、工業自動化等。根據 Yole Devolopement 的預測,未來消費電子類和智能汽車行業是3D視覺市場擴容的重要推動力。
? 3D 視覺感知技術最早被用于工業領域的測量和掃描。
在技術剛剛誕生時,主要被用于工業設備和零部件的高精度三維測量、物體和材料的微小形變測量等。為了能夠適應工業領域嚴苛的工況,并且滿足精確到微米級別的測量精度,3D視覺測量設備一般需要多種技術融合使用,比如利用相位結構光以及高精度工業相機組成工業三維測量儀器。這會導致設備成本高、體積大、功耗高,應用普及緩慢。在這個階段,市場上主要的玩家為德國高慕公司(GOM)、瑞典海克斯康(HEXAGON)、美國 CSI 公司等。這些公司的設備主要應用于測量工業零部件三維尺寸和形變,對工業部件實現高精度3D 數字化作業等。
??3D?視覺目前主要有四種技術路線
激光三角測量、結構光、飛行時間(ToF)、多目視覺等是 3D 視覺目前主要的幾種技術路線。幾種技術路線的不同之處主要在于發射紅外光獲取數據的方式不同。
a)?激光三角測量:
工作原理:采用激光線掃描物體表面,觀察激光線的變形以獲取物體表面的深度數據。
特點:其精度非常高,可達微米級。但其掃描速度和工作范圍有限。盡管如此,它在在線檢測中仍得到了廣泛應用,尤其是因為其高精度和動態測速性能。
b)?結構光:
工作原理:根據投影光束形態的不同,結構光法又可分為光點式結構光法、光條式結構光法和光面式結構光法等。通過被測物體反射回來的光柵與參考光柵之間的幾何關系,分析得到每一個被測點之間的高度差和深度信息。
特點:計算簡單,測量精度較高,對于平坦的、無明顯紋理和形狀變化的表面區域都可進行精密的測量。其缺點是對設備和外界光線要求高,造價昂貴。目前,結構光法主要應用在條件良好的室內。
c)?飛行時間(ToF):
工作原理:基于發射和反射光之間的時間延遲來測量物體的深度。
特點:與結構光相比,ToF不需要復雜的光模式解析,具有較高的魯棒性。其深度圖質量和精度都較好,但對于某些材質,如玻璃,可能存在挑戰。ToF技術較為復雜,成本相對較高。
d)?立體視覺法:
工作原理:使用兩個或多個RGB 彩色相機獲取圖像,并通過雙目匹配、三角測量等算法來得到深度信息。
特點:這是一種被動的3D 測量技術,硬件需求相對較低,但計算復雜度高。在弱光或目標特征不明顯的情況下,其表現可能不佳。在工業自動化和X86 系統中,雙目相機得到了廣泛的應用。
??應用領域持續拓展,打開3D?視覺廣闊空間
3D 視覺感知技術與產品經過多年的發展,已在鋰電池、半導體、AIoT、3C 消費電子、工業自動化、汽車應用等多個領域實現了推廣應用,市場空間十分廣闊。
全球3D?視覺市場維持高速增長
隨著下游市場需求的不斷增長和3D 視覺感知技術的升級,3D視覺感知市場將迎來快速增長期。隨著技術的進步,2D成像技術已經不能滿足當前日益復雜的應用需求,尤其是在人工智能、虛擬現實、增強現實等領域。3D視覺感知技術,憑借其能夠提供深度信息的特性,為各種應用帶來了更豐富的數據維度,從而大大提高了其應用價值。Yole Devolopement 的研究報告報告進一步證實了這一市場趨勢。據其統計,2019年,全球 3D 視覺感知市場規模已達 50?億美元。同時預計在 6 年之內,市場規模將會翻三倍,到2025 年達到 150?億美元。年復合增長率(CAGR)達 20%,這也意味著 3D 視覺感知技術的應用和普及速度正在加快。
不同技術路線下的3D?視覺技術市場空間均在不斷擴大

消費電子類和智能汽車行業是3D 視覺市場擴容的重要推動力。數據顯示,2019 年至 2025 年間,智能手機領域的市場規模預期從20.17 億美元激增至81.65 億美元,年均復合增長率高達26%。市場規模占比從40%增至 54%。而汽車領域的市場規模則預計從8.54 億美元增長至36.73 億美元,年均復合增長率達到28%,市場規模占比從17%增至 25%。這兩大應用領域將成為 3D 成像和傳感技術的主力軍,推動其在全球范圍內的普及和應用。
??機器視覺技術已成為確保鋰電池質量和效率的關鍵工具
鋰電池制造:在現代的鋰電池生產線上,機器視覺技術已經成為了確保產品質量和效率的關鍵工具。從動力電池的前期制造到后期的封裝,機器視覺在每一個關鍵工序中都發揮著重要的作用。在涂布、輥壓等前端工序中,鋰電池可能會產生各種表面缺陷,例如露箔、暗斑和劃痕。而機器視覺技術可以實時檢測這些缺陷,確保生產出的產品達到標準。隨著電池制造工藝的復雜性增加,如電芯后段的裸電芯極耳翻折和密封釘焊接,以及模組和PACK 階段的底部藍膠和焊縫等,機器視覺的應用已逐漸成為標準配置。
這一技術在應對鋰電池行業快速發展中也面臨著挑戰。首先,隨著大規模制造的到來,如何在保持高精度的同時提高生產效率,是一個普遍的問題。其次,新材料和新工藝的應用速度遠超過了機器視覺技術的迭代速度。例如,隨著磷酸錳鐵、硅基負極、高鎳三元等新材料的出現,以及CTC、CTB 等新工藝的應用,機器視覺技術需要更快地適應和升級。此外,雖然機器視覺已經在鋰電池生產中發揮了重要作用,但對于大量的檢測數據仍然沒有得到充分利用。
為了解決這些問題,業內已經采取了一系列的措施。在技術層面,推出了輕量化語義模型,確保機器在面對新工藝時具有更強的應對能力。產能布局上,重點投入到工業人工智能、先進光學和計算成像等研發項目,以擴充自身的視覺系統和智能視覺裝備的產能。此外,產品矩陣也進行了調整,重點發展了原材料隔膜檢測、極片電極段的檢測以及后工序的焊接檢測。
??半導體是機器視覺技術最早大規模應用的領域之一
半導體這一高度集成、精細的產業,無疑已經成為機器視覺技術最早大規模應用的領域之一。在半導體制造過程中,機器視覺起到了不可或缺的作用。從硅片的檢測分選,到晶圓的缺陷檢測,再到成品的外觀檢測,機器視覺技術都發揮著核心作用。例如,硅片檢測分選使用了3D 測量系統來對硅片的多種性能參數進行自動檢測,實現了檢測數據的管理與自動分類。又如在晶圓制造過程中,機器視覺用于檢測晶圓表面的各種缺陷,如雜物、裂紋等,并在封裝工藝中檢測晶片、膠水、焊線等的質量。
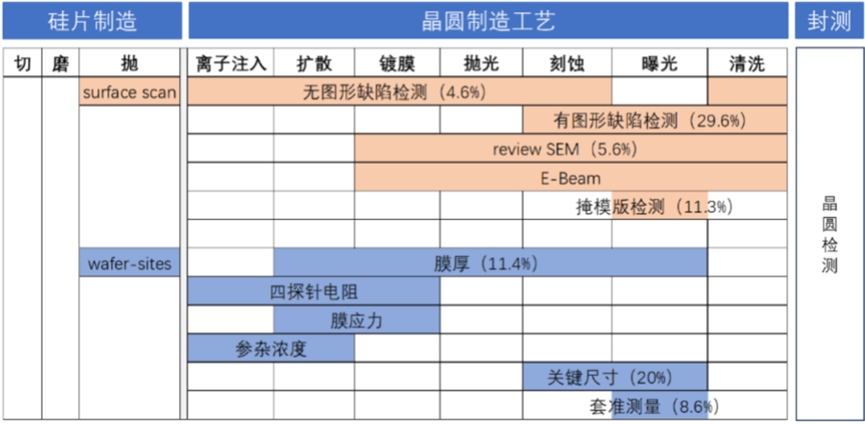
機器視覺在半導體行業應用范圍廣泛
半導體行業仍然面臨著一些技術與標準化的挑戰。首先,目前關于半導體芯片檢測設備的技術,尤其是微納米及納米級的2D、3D 光學成像技術,主要掌握在國外,這給國內產業帶來了一定的壓力。其次,雖然3D 視覺檢測與生產工藝緊密相關,但其設備還未有統一的國家標準,這在一定程度上制約了產業的進一步發展。
為了應對這些挑戰,行業已經開始進行技術突破。例如,開發了基于AI的缺陷檢測算法平臺,提高了算法的遷移能力和缺陷的檢測能力。同時,也在研發高速高精度的光學成像系統和運動隔震平臺架構,以實現更加精確和穩定的檢測效果。
隨著5G 芯片、激光芯片等新技術的出現,對機器視覺技術的要求也將更高,但機器視覺技術在半導體行業的應用無疑將更加廣泛和深入。
??3D?視覺感知技術大幅提升工業自動化效率
隨著3D 視覺感知技術的不斷成熟其為工業領域的生產、制造和研發帶來了革命性的機遇。
3D?視覺感知在工業領域有諸多基礎應用場景
高精度數據采集:傳統的2D 數據采集方法在許多領域中已不能滿足高精度要求。3D視覺感知技術在汽車、航空、數碼家電和醫學等行業,為研究人員和生產線提供了細致、準確的三維數據,這大大提高了制造和檢測的精度。
除基礎應用外,3D視覺在工業中的應用場景不斷拓展
先進質控在線檢測:在工業生產中,質量控制是至關重要的。3D視覺技術不僅可以處理低對比度、高反射或透明材料,還能有效地識別和定位產品上的細微缺陷,從而實現更為精確的在線質量監控。
柔性裝配與自動化:高度的生產自動化需要精確的數據支持。3D視覺在自動裝配中的應用,尤其在需要高精度和靈活性的領域如精密儀器制造已經變得不可或缺。機器人、協作機械臂配合3D 視覺系統可以實現更為精確的組裝和定位。
倉庫與供應鏈自動化?:在物流和供應鏈管理中,3D 視覺技術正在為倉庫自動化帶來全新的變革。從精確的貨物定位到智能揀貨,這項技術提供了必要的數據支持,使得倉庫操作更為高效、準確。
機器人的導航與感知:在工業環境中,機器人穩定、安全的視覺引導是至關重要的。它通常分為兩種主要策略:一種是結合移動機器人與機器視覺,另一種是結合機械臂與機器視覺。這兩種策略為機器人提供了在其操作環境中精確定位和導航的能力。
在眾多的環境感知技術中,激光雷達和毫米波雷達各自擁有其獨特的優點和局限性。例如,激光雷達以其高精度和廣泛的探測范圍為人所知,能夠有效地為機器人構建其周圍環境的3D 信息模型。然而,它在惡劣天氣條件下可能會受到干擾。相對之下,毫米波雷達在煙霧、灰塵等低能見度環境中表現出色,其強大的穿透性使其能在這些特殊環境下提供可靠的測距信息。但是,其測距的精度相對較低。

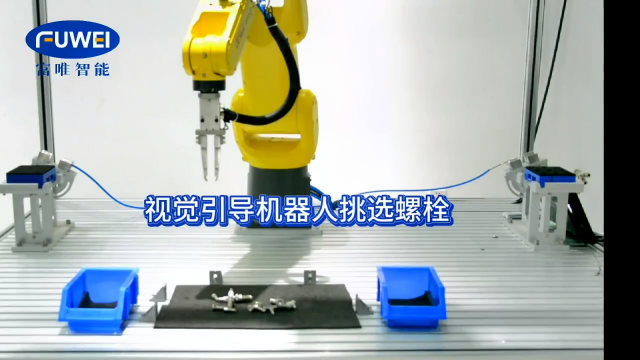
3D?視覺被廣泛應用于工廠移動機器人引導中
??AI?加速?3D?視覺技術發展
隨著深度學習和人工智能的崛起,尤其是卷積神經網絡(CNN)和變形器網絡(Transformer)的進步,3D 視覺技術的研究和優化已在精確度和效率上獲得顯著提升。
深度學習技術可與3D?視覺技術緊密結合
在3D 視覺的深度學習應用中,典型的工作流程可分為模型訓練和圖像識別兩大階段。
模型訓練:此階段的關鍵任務是從大量標注的3D 數據樣本中提取和學習有代表性的特征。這通常涉及大量的計算,包括前向傳播、誤差反向傳播以及參數優化等過程。在深度學習模型中,網絡的深度、層數和結構復雜度都可能影響到模型的最終性能。
圖像識別:在模型訓練完畢后,我們可以使用它來識別新的、未標記的3D 圖像數據。此階段主要包括數據預處理、特征提取和最終的分類或回歸等任務。
深度學習技術為3D?視覺帶來了革命性變化
深度學習,尤其是卷積神經網絡和變形器網絡,已經為3D 視覺帶來了多方面的革命性變化。
高精度和魯棒性:通過多層網絡結構,深度學習模型能夠自動地從原始數據中提取和學習復雜的特征,這極大地提高了3D 物體識別和分類的精度。
廣泛的應用領域:由于其出色的泛化能力,深度學習模型已被成功應用于多個3D 視覺領域,包括物體檢測、場景理解、人體姿態估計、深度估計等。
??群雄逐鹿,掘金3D工業視覺:老牌廠商和初創企業者各有所長
3D 工業視覺領域的主流參與者大致可以劃分為兩大類別:傳統2D 視覺的內外資領先廠商,以及國內新興廠商。這些公司之間的業務范圍和專長有所不同。
來自傳統2D 視覺領域的頭部廠商,無論是國內還是國外品牌,都在工業高精度和高效率的測量與識別領域展現出了明顯的優勢。這些公司通常在工業應用中結合1D、2D 和 3D 技術,實現更精準的識別和測量。
例如,基恩士和康耐視憑借其領先的鏡頭和CMOS 傳感器技術,能夠在短短0.6 秒內完成檢測。與此同時,他們在3D 技術的算法上也取得了顯著的進步,如基恩士搭載的AI 芯片和康耐視的VisionPro Deep Learning 軟件。
?
基恩士推出3D輪廓測量儀
在工業高端應用,如汽車、3C、鋰電池、半導體等領域,這些頭部企業,如基恩士、海康威視和奧普特等,憑借在 2D 視覺領域的深厚技術和客戶基礎,成功地轉型和升級,贏得了大量的高價值訂單。相比之下,許多國內的3D 視覺初創公司更多地聚焦于中低端的應用領域,例如物流、金屬加工、3C電子等。
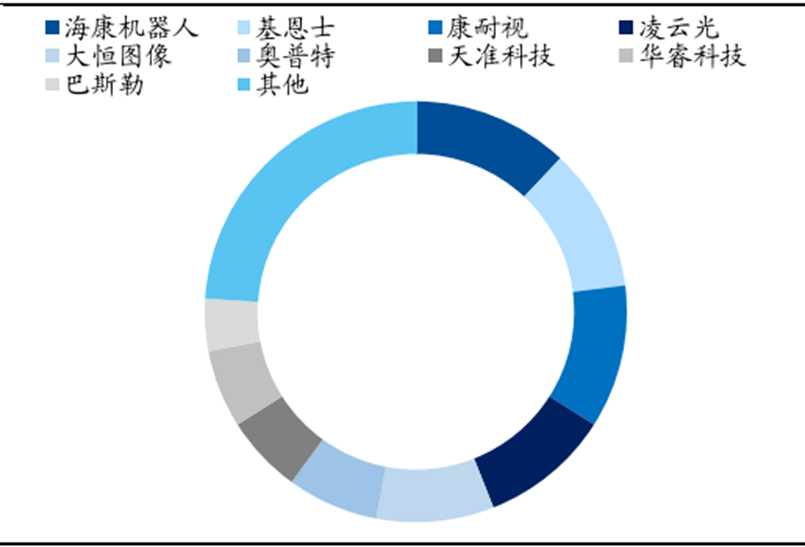
2021?年,我國機器視覺市場中海康機器人、基恩士、康耐視等廠商處于領先地位
部分機器視覺廠商以進行全產業鏈布局

在機器視覺軟件方面,定位算法模塊數量、算法性能、軟件靈活性和易用性等因素都是決定性的考量點。在這一方面海內外主流玩家側重點不同。
虹軟科技的手機拍攝算法與VisDrive:手機方面,虹軟科技作為全球安卓系手機拍攝算法的霸主,三星、華為、OPPO、VIVO、小米等手機廠商均是公司客戶,公司技術儲備豐富,已實現對于單攝、雙攝、深攝的全面覆蓋,并不斷推出新的SDK 帶動手機拍攝算法單機價值量提升。汽車方面,虹軟科技推出了一系列艙內、艙外視覺解決方案。截至2023H1,分別搭載了公司DMS、OMS、Face ID、TOF 手勢、艙外體態識別拍照、AVM 等艙內外算法的量產出貨車型已有數十款,主要知名車型如理想L9,長城哈佛系列、歐拉系列、坦克系列,合眾哪吒系列,長安CS75、PLUS、UNI-T,長安新能源深藍SLO3,吉利豪越 L、銀河 L7、領克?06,奇瑞星途攬月,東風嵐圖Free、夢想家、追光等。
康耐視的VisionPro:這款軟件搭載了超過 100?種工具,其中 2D 定位精度在最好情況下可以達到1/40?像素,而通常情況下為1/4 像素。其處理效率非常出色,5M像素的圖像處理時間在50ms 以內。但是在3D 視覺定位的精度上,VisionPro達到了 2.5μm,盡管其具體的處理效率尚未公開。除了硬件性能,VisionPro也為開發者提供了不錯的軟件體驗,雖然其不支持底層框架的開放,但確實支持二次開發,使得軟件靈活性和易用性都保持在行業的中等水平。
奧普特的SciVision:與VisionPro 類似,SciVision也提供了超過 100?種工具。不過,它在 2D 定位的精度上并未披露具體數據,但其28M 像素的圖像處理速度為68.19ms。從軟件的靈活性和易用性角度看,SciVision主要針對直接應用,其工具的拖拽式操作和專用性設計使得整體易用性處于中等水平。
凌云光的VisionWare?展現了另一種競爭策略:其提供的工具超過100?種,2D 定位精度為 1/2 像素,5M 像素的圖像處理速度為 20ms。更令人印象深刻的是,其 3D 定位精度達到了 2μm,處理速度為500ms。在識別算法上,其 99%的識別率和 5M 像素圖像的 80ms 處理速度都表現出色。但從軟件使用的角度來看,VisionWare主要以直接應用為主,其工具的拖拽式操作和專用性設計與SciVision相似。
海康機器人的VisionMaster:這款軟件憑借其 1500+算子和 170+工具在數量上遠超其他三家。在2D 定位上,其最好的精度可以達到1/16 像素,而通常情況下為1/4 像素,5M像素的圖像處理時間僅為10ms。此外,其3D視覺定位的精度為6μm,處理速度為300ms。在軟件的靈活性和易用性上,VisionMaster同樣展現出了優勢。它支持算子調用、SDK二次開發,以及底層框架的開放。整體的軟件設計既圖形化又流程化,為開發者提供了友好的交互體驗。
編輯:黃飛
?










 工商網監
工商網監
評論