 電子發燒友App
電子發燒友App


隨著智能機器人產業的持續發展,視覺檢測機器正迸發出更加強勁的活力。
#01
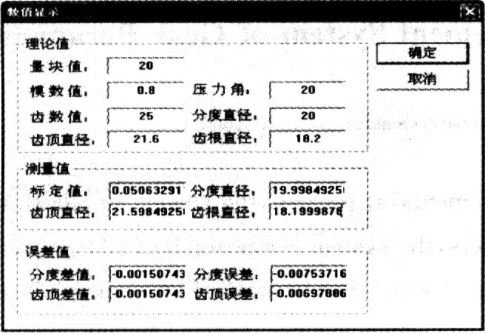
什么是視覺檢測設備
視覺檢測是指通過機器視覺產品(即圖像攝取裝置,分 CMOS 和CCD 兩種)將被攝取目標轉換成圖像信號,傳送給專用的圖像處理系統,根據像素分布和亮度、顏色等信息,轉變成數字化信號;圖像系統對這些信號進行各種運算來抽取目標的特征,進而根據判別的結果來控制現場的設備動作。
隨著人工智能技術的快速落地,智能機器人產業的持續發展,視覺檢測機器正迸發出更加強勁的活力。
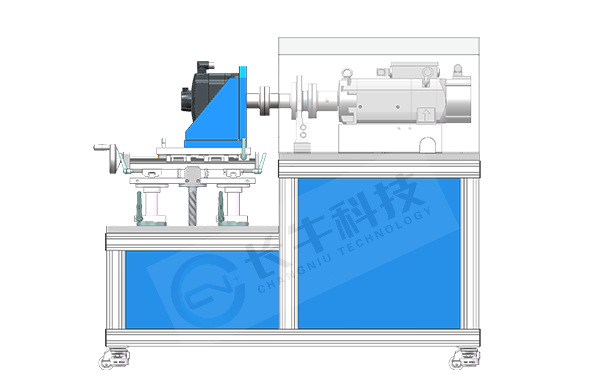
視覺檢測設備設計的典型結構主要包括五個部分組成,分別是:照明、鏡頭、相機、圖像采集和運動控制系統。
#02
視覺檢測類項目經歷哪些測試階段
1.軟件測試
聚焦功能實現是否與客戶需求一致,保證軟件流程的正確性,以及正確的應用邏輯關系。
通過對軟件的輸入進行控制,從而達到不同的測試結果,通過輸入輸出的差異比較測試是否正確和準確,從而發現系統中的漏洞,展開研發修改與測試驗證的循環過程。
2.硬件測試
針對硬件本身以及環境開展硬件可靠性測試,比如老化測試、兼容性測試、故障率測試等。
需要對常見的硬件配置進行測試,從而確定軟件能夠在多種硬件配置環境下運行,例如:與整機、板卡和外設的兼容性測試。
3.聯調測試
主要對軟硬件聯調功能展開測試:驗證電氣與軟件信號通訊邏輯、光源、相機等硬件觸發拍照、掃描等功能的正確性及檢出情況的統計等。
如遇外系統對接,則需要檢查各系統間模塊基本功能、算法檢出能力與節拍等內容是否符合客戶預期標準。
4.模型測試
針對模型測試,重點關注模型的功能測試、性能測試、模型指標的評估及指標結果分析。
采取方法:采取A/B測試、魯棒性測試、離線測試、在線測試等手段,評估模型的可靠性及穩定性。
離線測試/在線測試:歷史數據進行離線環境訓練與測試評估,生成離線模型版本。為確保模型服務穩定性,需要對模型進行線上線下一致性驗證、模型線上穩定性驗證測試。
一致性測試:使用同一批樣本分別在離線與在線環境下請求模型服務,系統對模型服務決策結果進行對比分析。
穩定性測試:采用線上新樣本請求模型,根據模型的決策結果對模型進行評估。模型評估指標參考:KS、ROC等。
A/B測試:算法模型在確保穩定性時會迭代產生多個版,在線服務如使用模型A進行決策,當要進行模型版本迭代時,需要在離線環境下訓練出模型B,然后將其部署到線上環境,分析在線與離線的A/B測試結果,通過轉化率等方式輔助決策使用哪個版本。
5.性能測試
硬件開展連續采圖,驗證程序的穩定性、信號通訊穩定性、存圖邏輯正確性。
軟硬件聯調穩定性測試:基于客戶生產環境部署場景,實施一定時長的負載運行,監控分析檢測節拍及性能指標是否符合客戶預期。
#03
如何開展視覺檢測設備的測試工作?
1.產品需求分析
需求分析是開始測試工作的第一步,根據項目本身的需求資料輸入,測試人員需提煉出該項目的測試范圍、 功能點、業務流程、預期輸出、異常流程以及所需的時間和資源。
測試用例是一組由前提條件、測試輸入、執行條件以及預期結果等組成,以完成對某個特定需求或者目標測試的數據,體現測試方案、方法、技術和策略的文檔。
測試工程師需要針對具體項目的需求,從機械、電氣、軟件、算法等方面展開思考,設計測試用例。
3.測試執行與缺陷管理
區分測試階段:分別執行測試用例,運用測試工具輔助進行測試,提升測試效率,例如:相機調試工具、PLC調試軟件、數據庫工具、接口、性能測試工具等。
缺陷的定義:
(1)未達到合同或技術協議中約定的功能要求;
(2)出現了產品說明書指明不會出現的錯誤 ;
(3)功能超出產品說明書范圍 ;
(4)未達到產品說明書雖未指出但應達到的目標;
(5)被認為難以理解、不易操作、運行速度慢或最終用戶認為不好。測試工程師需要明確缺陷的類型、優先級與嚴重程度,運用缺陷管理工具或缺陷清單的方式進行缺陷的記錄、反饋、驗證等工作。
4、重要檢查項的驗證
發貨前的驗證,需要關注以下幾點:
線路的安全檢查:必須先安裝地線。
視覺檢查設備工作時,存在高電壓,為了避免安全事故,在頻繁使用視覺檢查裝置的時間上,通過設置接地線,安全對策會大幅提高。
電壓的穩定性檢查:一般工業設備工作時的電壓為220V,其中也有380V。
電壓不對稱容易對人們的工業設備造成比較嚴重的傷害,降低機械設備的使用期限。
接口檢查:例如數字量輸入和輸出,用于觸發的啟動器,與PLC的通信,機器人,線性軸,數據庫系統等。
調試驗證:使用少量的工件變量進行手動和自動操作的系統測試。
結果記錄:應詳細記錄好壞圖像以及對測試結果的評估。
#04
一套高品質的機器視覺檢測系統必須具備的條件
1.高品質的成像系統
成像系統被稱為視覺檢測設備的“眼睛”,因此“眼睛”識別能力的好壞是評價成像系統的最關鍵指標。通常,成像系統的評價指標主要體現在三個方面:
(1)能否發現存在的缺陷
基于圖像方法進行的檢測,所能夠依據的最原始也是唯一的資料即是所采到的圖像上的顏色(或者亮度變化),除此之外,沒有其他資料可供參考。
所以,一個高品質的成像系統首先應該是一個能充分表現被檢測物表面顏色變化的成像系統。
因此除了選擇具有高清晰度的相機與鏡頭之外,用以營造成像環境的光照設計也顯得非常重要,有時候甚至會出現為特殊缺陷專門設計的光照系統。
經常所說的100%質量檢測系統,實際上指的是在能夠充分表現各種缺陷的圖像中的100%全檢。
(2)能夠發現的缺陷的最小尺寸
數字圖像的最小計量單位是像素(pixel),它本身并不代表被攝物實際的尺寸大小。
被攝物實際尺寸大小與像素之間的關聯是通過一個叫做分辨力的物理量來完成的。分辨力指的是每單位像素代表的實際物體尺寸。
分辨力數值越小,圖像的精細程度就越高,檢測系統能夠發現的缺陷尺寸就越小,檢測精度就越高。
(3)能否足夠快地攝取圖像
如同人眼看運動物體一樣,當物體運動的足夠快時,人眼就不能再清晰的觀察到物體的全部。
機器視覺檢測系統的“眼睛”攝像機也有一個拍攝速度上限,即相機主頻。
當被攝物的運行速度超出了攝像機的主頻上限時,攝像機就不能獲得清晰、完整的圖像,檢測就不能正常地繼續下去。
攝像機主頻越高,采集速度也就越快,檢測才能保持高效進行。
因此,是否采用了足夠高主頻的攝像機也是評價一個成像系統是否高品質的關鍵因素。
2.成熟的圖像處理與分析算法
圖像處理與分析算法在整個檢測系統中相當于人工檢測時人腦的判斷思維。
由于機器視覺是一個實踐性很強的學科,評價一個算法的好壞更多的是依賴于實際應用的驗證,而非考察算法中是否采用了比較先進或高深復雜的理論。
因此一個能夠充分模擬人腦判斷過程與方法并且穩定、高效的圖像處理與分析算法才是我們需要的,也就是所謂的成熟的處理與分析算法。
因此,在設計處理算法時,需要充分分析人的判斷過程,并將其轉換成計算機的語言。
3.可操作性好
可操作性好主要要求檢測設備的應用操作要具備簡潔、方便并易于理解的特點。比如系統有友好的人機交互界面、良好的導向性操作設計等。
4.穩定的其他配套設施
其他配套設施指的是除了檢測系統以外的設施,如傳輸控制平臺、缺陷處理裝置(剔除、報警、標記等)。要求是必須運行穩定、信號響應及時、迅速。
審核編輯:黃飛













 工商網監
工商網監
評論