 電子發(fā)燒友App
電子發(fā)燒友App


電機學(xué)是電氣工程的核心學(xué)科,深入研究和探討了電動機的工作原理、設(shè)計控制方法、系統(tǒng)優(yōu)化以及在不同領(lǐng)域的應(yīng)用。電動機作為現(xiàn)代工業(yè)的重要動力源,其發(fā)展歷程與生產(chǎn)力的發(fā)展緊密相連,同時電動機的不斷創(chuàng)新也推動了社會生產(chǎn)力的提升。
電動機應(yīng)用領(lǐng)域廣泛,種類繁多、性能各異,因此分類方法也有很多種。以下是一些常見的分類方式:
▍按工作電源分類:分為直流電動機和交流電動機
▍按結(jié)構(gòu)及工作原理分類:分為異步電動機和同步電動機
▍按轉(zhuǎn)子的結(jié)構(gòu)分類:分為鼠籠式交流感應(yīng)電機和繞線式交流感應(yīng)電機
國內(nèi)虛擬研究平臺多基于單電機設(shè)計,而實際工業(yè)中多電機配合工作更為常見,如機器人、3D打印機等。多電機同步控制在工業(yè)自動化生產(chǎn)系統(tǒng)中廣泛存在,但目前基于FPGA納秒級實時仿真平臺多為單電機設(shè)計,進行多電機實時仿真需要進行FPGA拓展和底層架構(gòu)修改,增加了使用成本和學(xué)習(xí)精力。
為解決這一問題,EasyGo團隊推出了2024版DeskSim的HIL應(yīng)用,直接支持多電機同步實時仿真,可實現(xiàn)多電機仿真功能,降低了多電機仿真測試的門檻和成本。 ? ?
今天我們?yōu)榇蠹曳窒?strong>利用Easygo仿真平臺進行雙電機系統(tǒng)的實時仿真應(yīng)用。
電機模型
目前EasyGoMachine常用電機庫中包含:鼠籠式交流感應(yīng)電機、繞線式交流感應(yīng)電機、直流電機永磁式、直流電機繞線式、直流無刷電機、永磁同步電機六種,后續(xù)還在持續(xù)更新中。

利用EasyGoMachine電機庫中的模塊,可以快速進行多電機系統(tǒng)程序的搭建,搭配EasyGoDeskSim軟件將程序部署到FPGA中以不超過1.5us的步長進行實時運行,無需進行FPGA編譯。
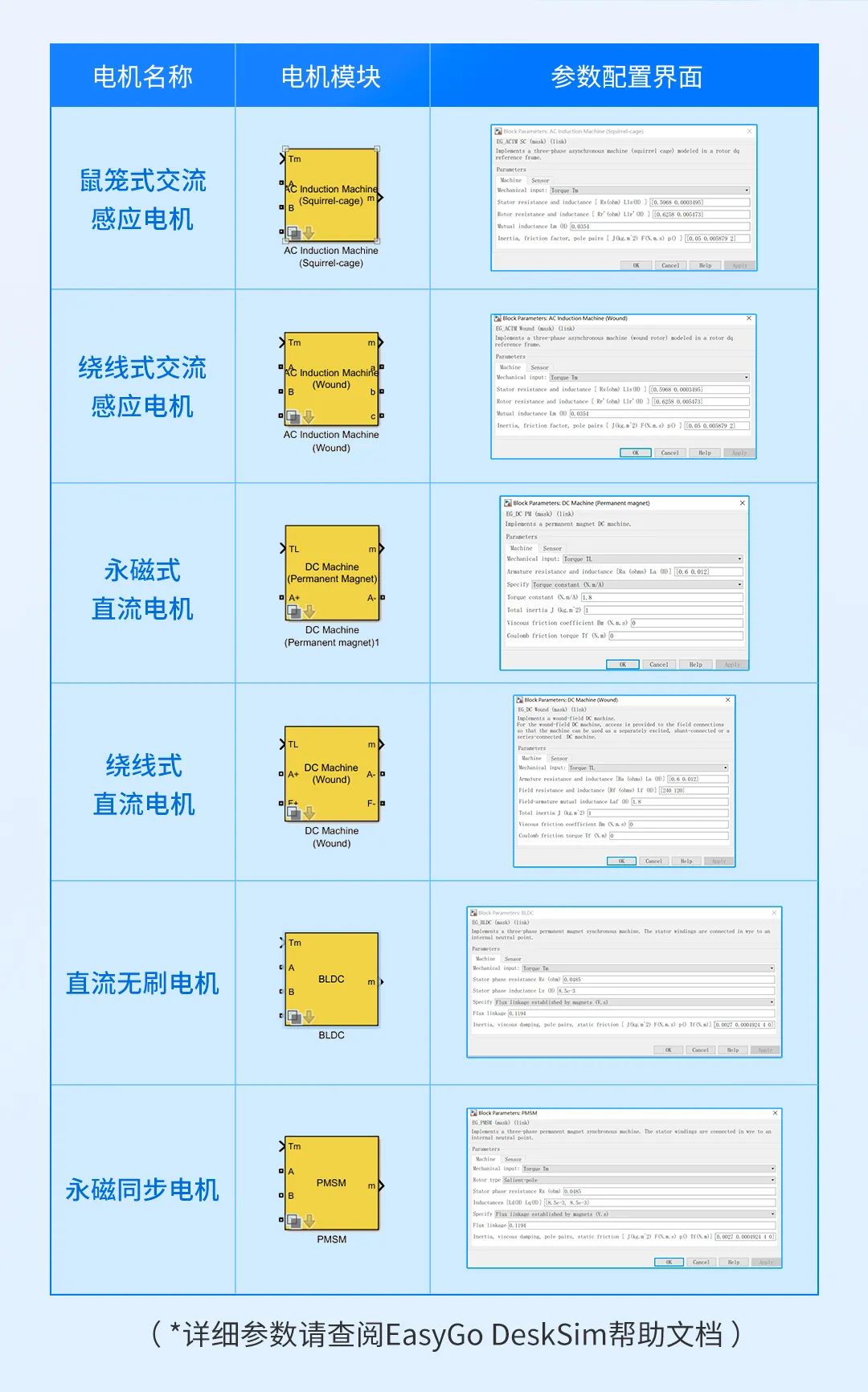
以上為EasyGo Machine常用電機庫中的六種電機的配置參數(shù)。
基于EasyGoMachine的電機模塊、EasyGoDeskSim軟件和實時仿真設(shè)備,用戶就可以快速搭建任意的多電機仿真程序并進行驗證。
雙電機系統(tǒng)仿真 
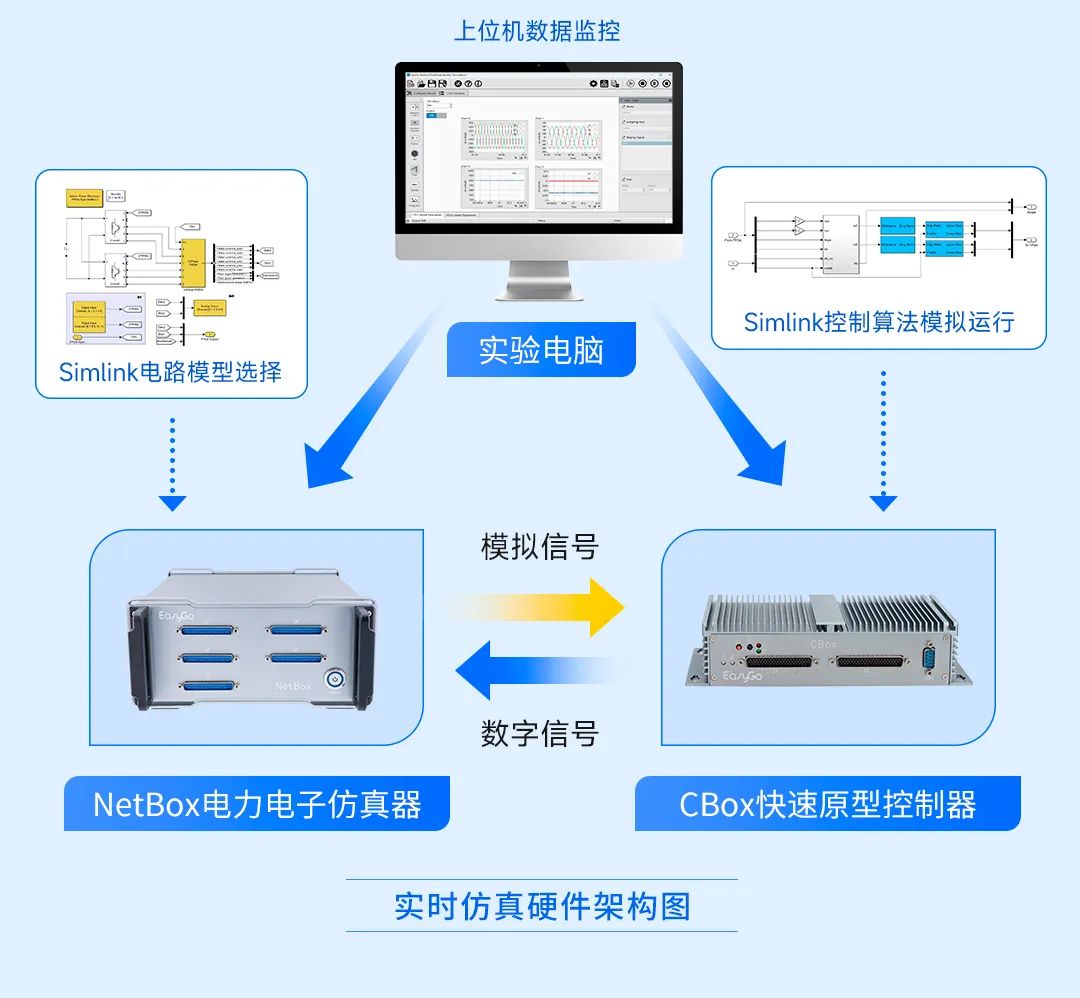
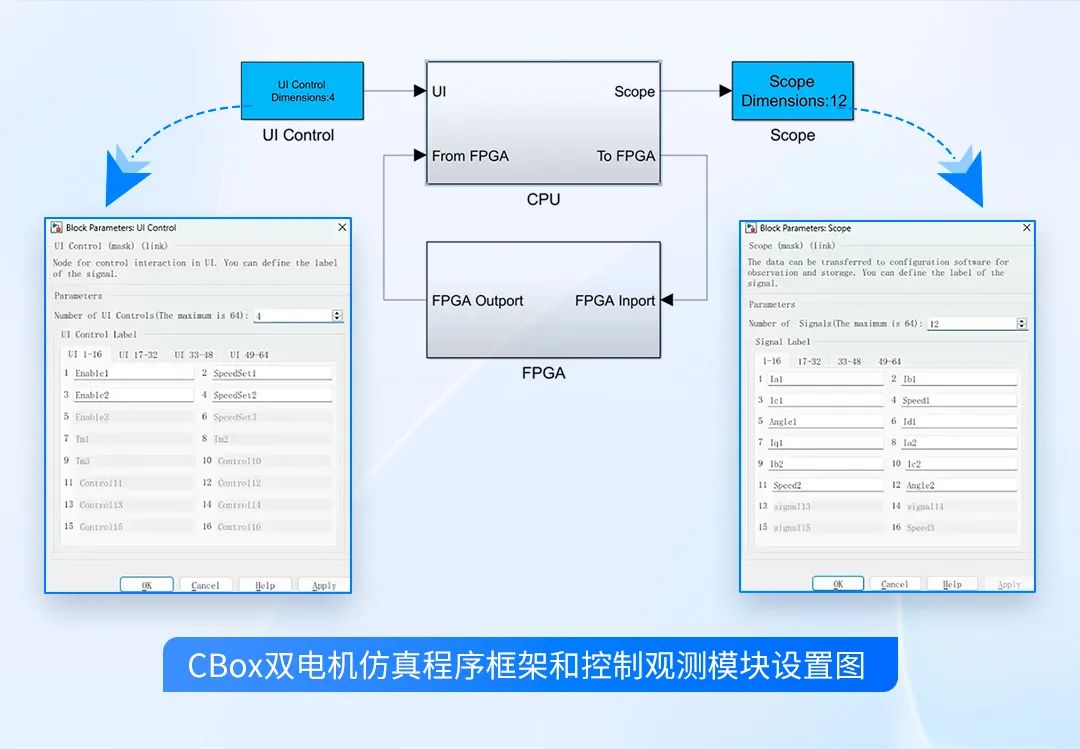
下面為大家分享基于EasyGo CBox+NetBox的系統(tǒng)進行雙電機系統(tǒng)的同步仿真。
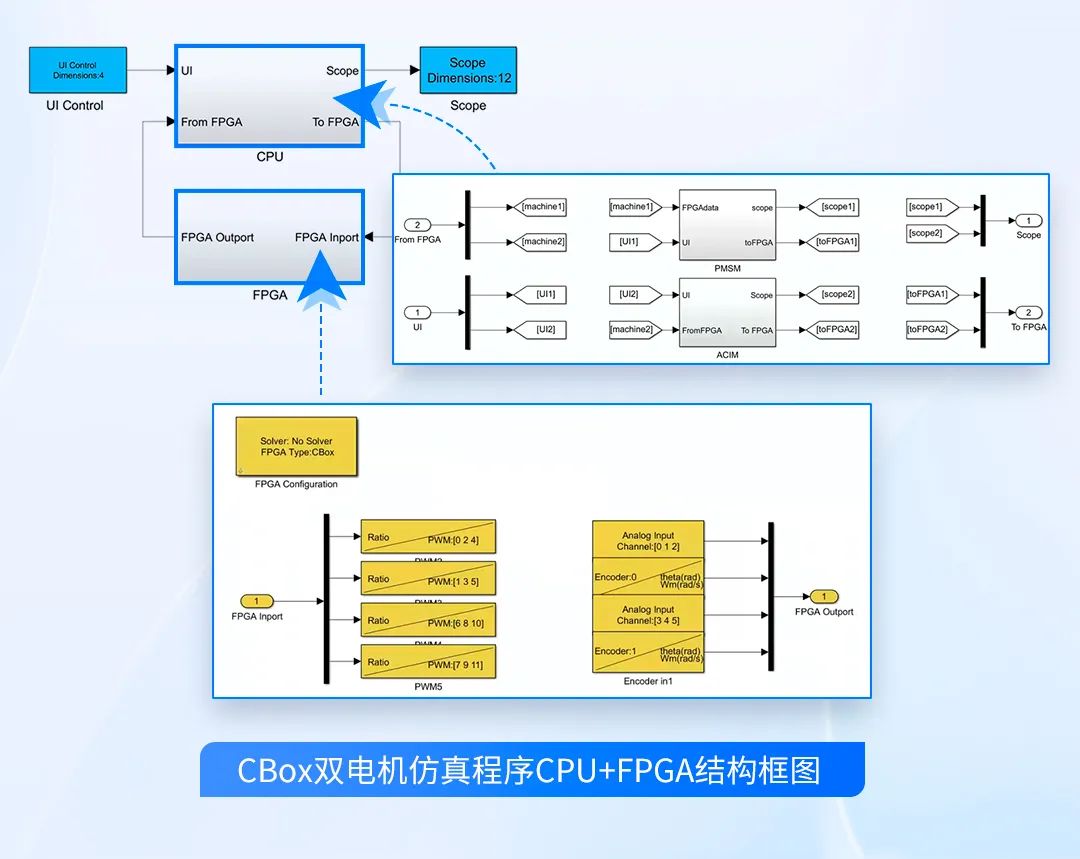
CBox是一款快速原型控制器產(chǎn)品,采取CPU+FPGA的硬件架構(gòu),幫助用戶在安全舒適的實驗室快速調(diào)試和驗證控制算法,而NetBox是一款基于FPGA架構(gòu)的一體化電力電子FPGA實時仿真產(chǎn)品,搭配EasyGoDeskSim軟件,就可以完成實時仿真設(shè)備的部署模型,系統(tǒng)程序的數(shù)據(jù)的下發(fā)與監(jiān)測,從而高效進行模型在環(huán)硬件仿真實驗。
01 ? 雙電機系統(tǒng)離線仿真
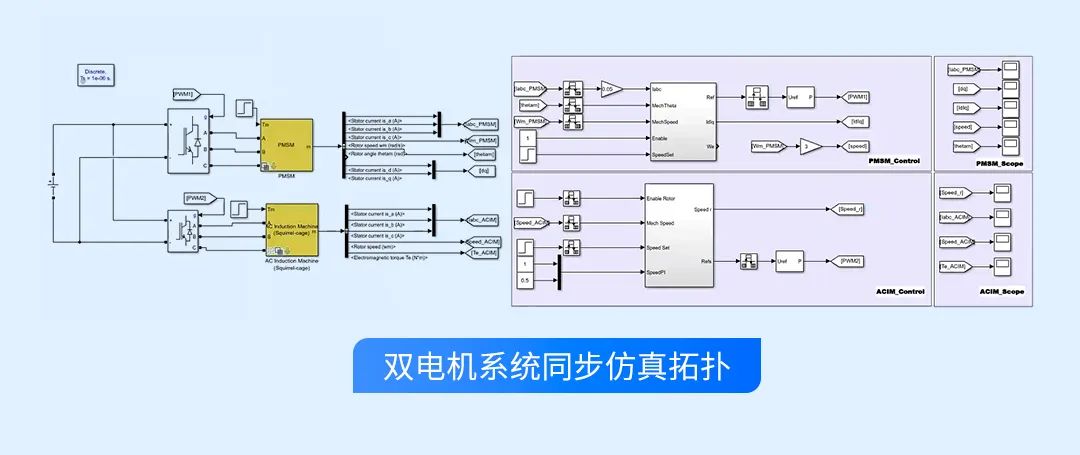
本次仿真測試采用的是永磁同步電機和鼠籠式交流感應(yīng)電機雙電機系統(tǒng)同步仿真,仿真拓?fù)淙鐖D所示。
永磁同步電機參數(shù)為:Rs= 0.0485 Ω;電樞電感L=0.395mH;Ψfd= 0. 1194 Wb;轉(zhuǎn)動慣量J= 0. 0027kg·m2;極對數(shù)為3。
鼠籠式交流感應(yīng)電機參數(shù)為:定子電阻Rs=0.896Ω;定子電感Lls=1.94mH;轉(zhuǎn)子電阻Rr'=1.82Ω;轉(zhuǎn)子電感Llr'=2.45mH;互感Lm=46.2mH;轉(zhuǎn)動慣量J= 0. 1475kg·m^2;摩擦系數(shù)F=0.013374Nm/(rad/s);極對數(shù)為2。
02 ? 雙電機系統(tǒng)實時仿真
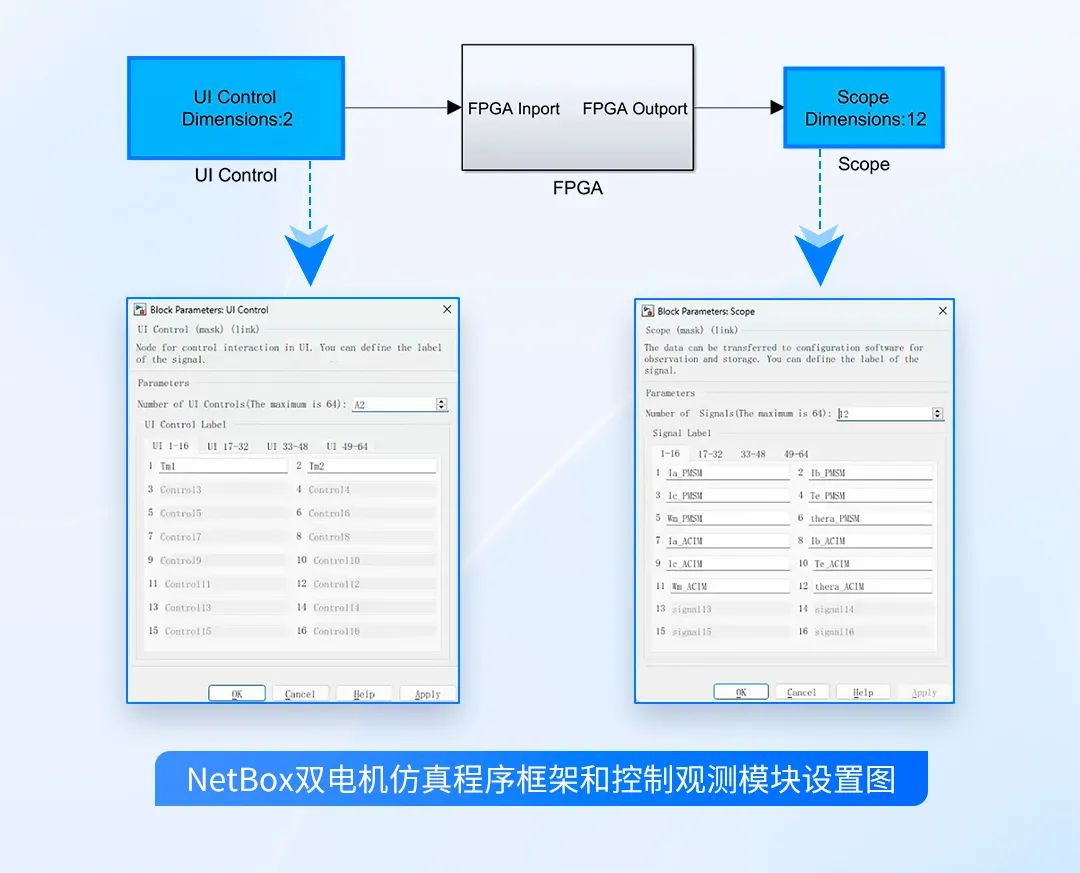
我們使用NetBox仿真器來進行雙電機電路的實時仿真,仿真步長為1us;使用CBox作為控制器,控制速率設(shè)為10khz,來完成閉環(huán)仿真測試。
利用EasyGoMachine模塊,DeskSim可以把模型直接部署到FPGA進行快速仿真,仿真拓?fù)淙缦聢D所示。
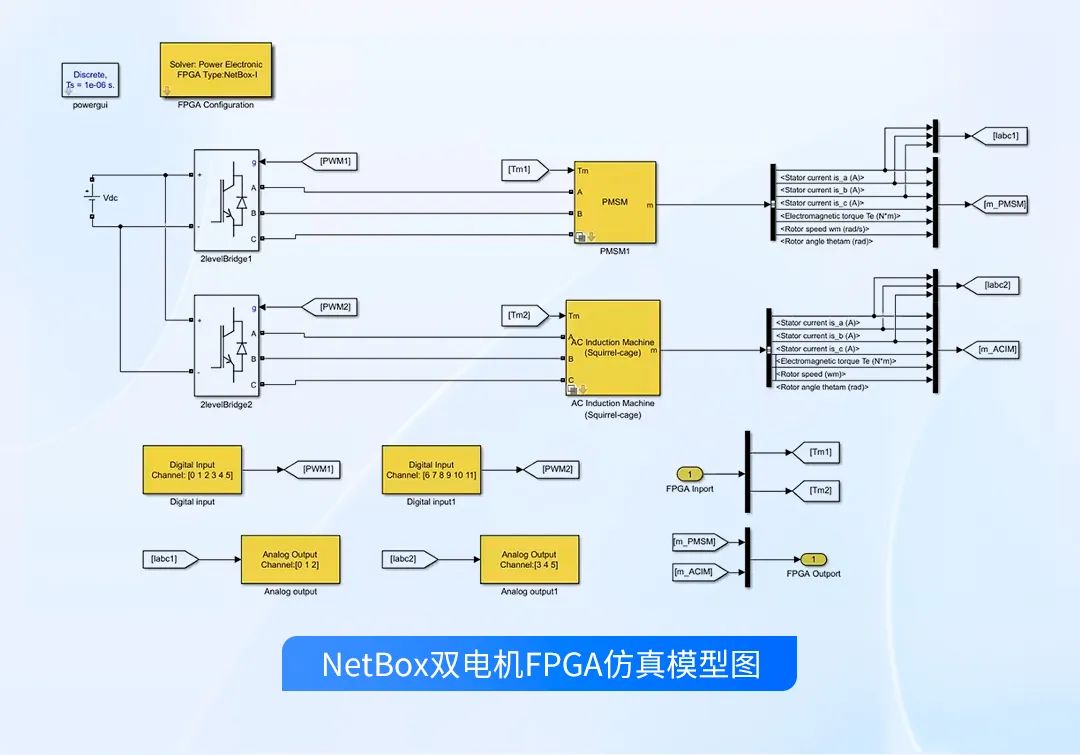
這樣,我們就完成了雙電機系統(tǒng)的demo實時仿真程序。
實時模型搭建完成后就可以載入Desksim軟件,軟件會自動分析模型信息。
在交互界面,用戶可自定義搭建交互模塊,將實時仿真設(shè)備與上位機在同一個局域網(wǎng)中連接,就可以通過Desksim將載入的程序部署到相應(yīng)的設(shè)備中并開始運行實時仿真。
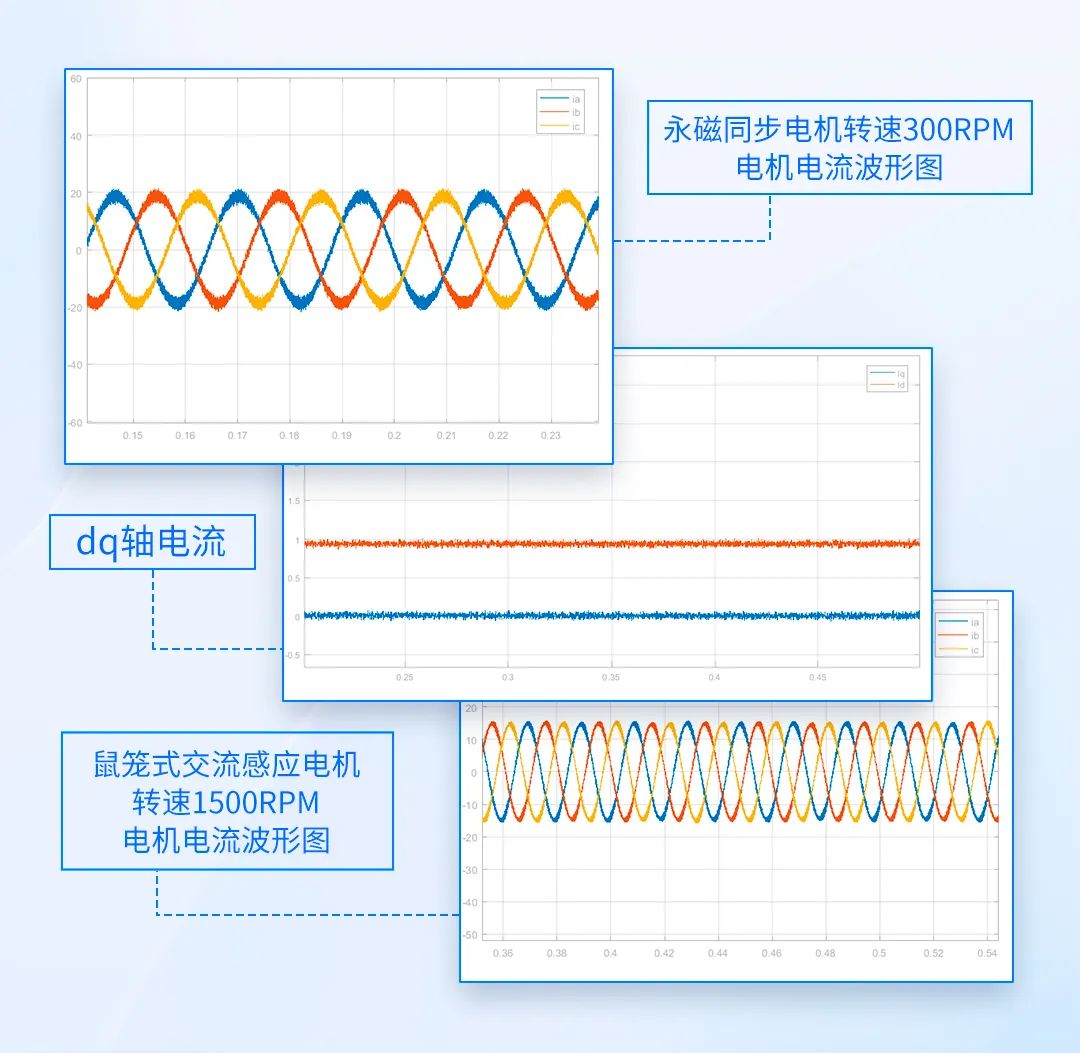
我們將永磁同步電機轉(zhuǎn)速設(shè)置為300RPM,鼠籠式交流感應(yīng)電機轉(zhuǎn)速設(shè)置為1500RPM,轉(zhuǎn)矩均設(shè)置為10,仿真波形如下圖:
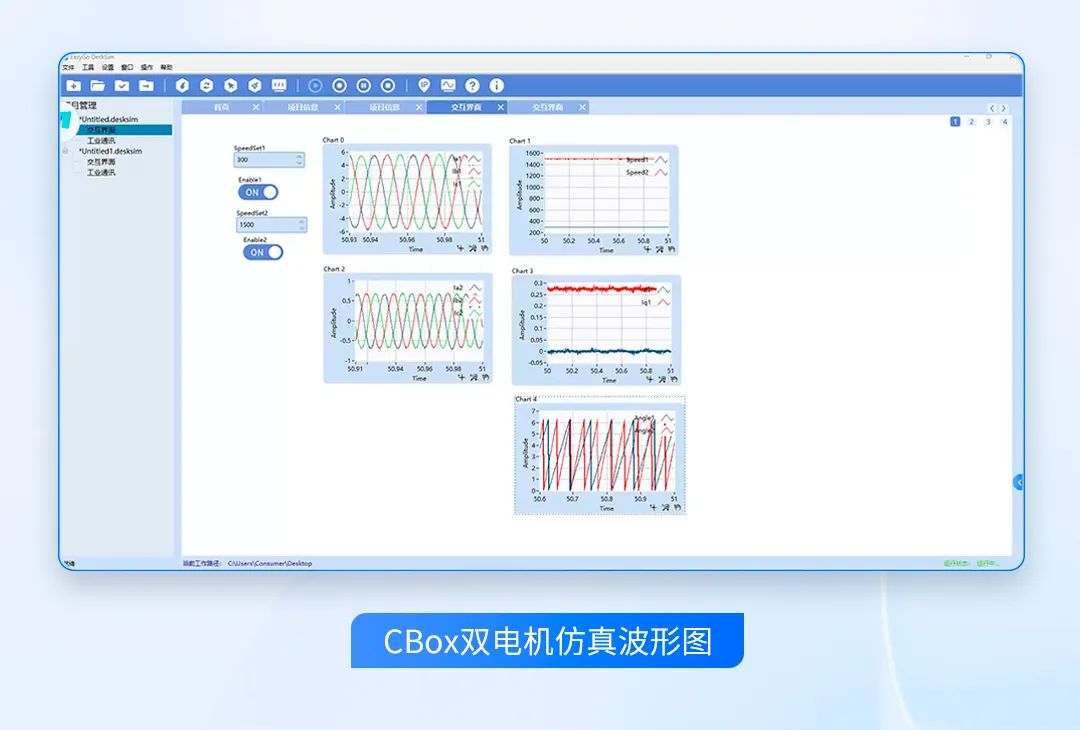
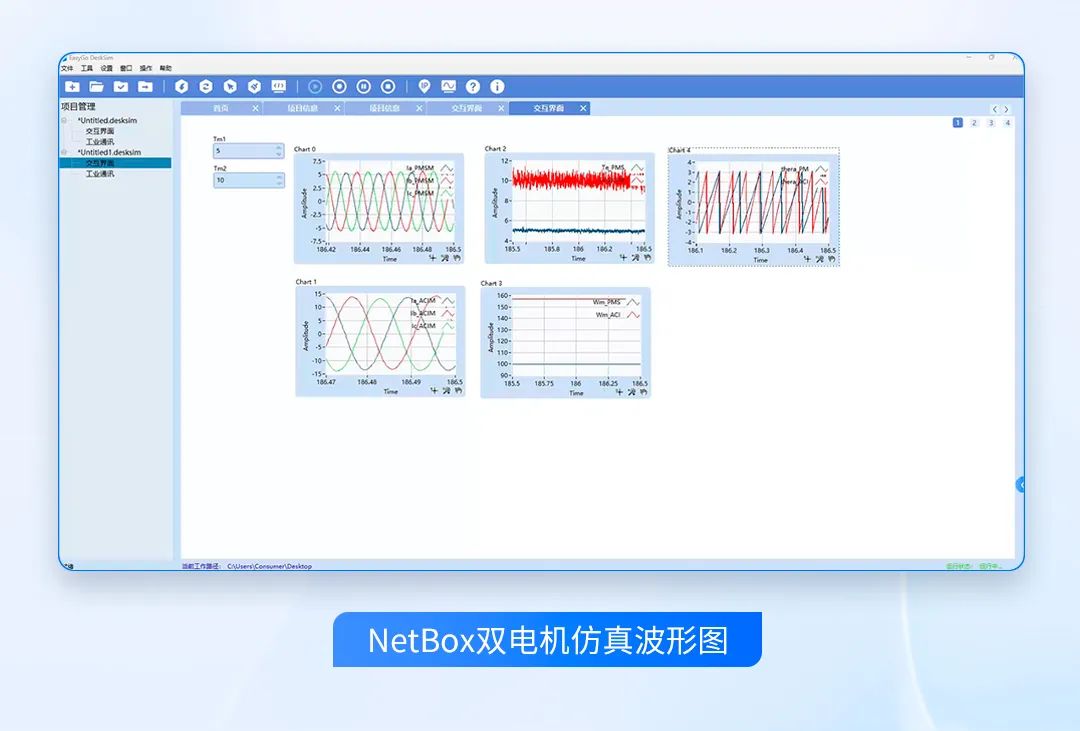
通過仿真的結(jié)果可知,基于CBox+NetBox 的雙電機系統(tǒng)實時仿真結(jié)果與離線仿真結(jié)果基本一致,且調(diào)節(jié)轉(zhuǎn)速和轉(zhuǎn)矩的設(shè)定值,系統(tǒng)也能實時跟隨變化,將電機轉(zhuǎn)速穩(wěn)定在設(shè)定值。
EasyGoDesksim可通過在線調(diào)參功能對系統(tǒng)的功率電路部分進行實時調(diào)控,這里就不過多贅述。
審核編輯:黃飛
?
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論