伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2022-08-17 11:01:34 6057
6057 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2023-05-16 15:56:152478 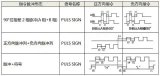
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2023-12-20 18:22:53895 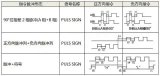
1200PLC控制伺服電機(jī)沒(méi)有原點(diǎn)傳感器可以回零嗎?
2023-03-30 16:40:53
1500走EPOS模式控制V90增量式編碼器電機(jī),限位和原點(diǎn)能直接接伺服驅(qū)動(dòng)上嗎?為什么回原點(diǎn)是碰到限位是伺服回報(bào)警,可以設(shè)置成碰到限位反轉(zhuǎn)的回原點(diǎn)方式嗎
2024-01-09 12:31:28
2.4寸TFT液晶 選擇16位方式還是8位方式需要進(jìn)行格外的操作嗎????????我看了一下控制器ILI9325的資料 里面說(shuō) 通過(guò)引腳IM3-IM0來(lái)配置TFT的通信方式。可是我在看了一下2.4寸TFT液晶的電路圖從液晶屏里引出來(lái)的軟線引腳中就沒(méi)有IM3-IM0。這是怎么回事呢????
2020-03-17 21:57:08
伺服電機(jī)原點(diǎn)位置在運(yùn)行一段時(shí)間后發(fā)生偏移怎么解決?
2021-09-28 09:21:28
最近發(fā)現(xiàn)友友們有時(shí)候會(huì)遇到開(kāi)機(jī)前伺服電機(jī)不能回原點(diǎn)或者回原點(diǎn)過(guò)程需要相當(dāng)長(zhǎng)的時(shí)間而且原點(diǎn)位置不對(duì)的問(wèn)題。造成以上原因主要有以下幾點(diǎn):1.編碼器有問(wèn)題,更換編碼器。2.有點(diǎn)位近接開(kāi)關(guān)的靈敏度有問(wèn)題。3.在伺服器里面把參數(shù)清0。
2021-10-14 17:06:40
伺服電機(jī)有哪幾種制動(dòng)方式?再生制動(dòng)/電磁制動(dòng)/動(dòng)態(tài)制動(dòng)的區(qū)別是什么?選擇伺服電機(jī)配件時(shí)的注意事項(xiàng)有哪些?
2021-10-13 06:04:16
伺服電機(jī)有哪幾種控制方式?
2021-09-24 08:37:20
伺服電機(jī)有哪幾種控制方式?
2021-09-29 07:16:29
一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。大多數(shù)人想知道的就是這三種控制方式具體根據(jù)什么來(lái)選擇的?
2021-01-29 07:28:36
伺服電機(jī)的三種控制方式
2021-01-21 06:45:01
伺服電機(jī)的制動(dòng)方式Monday, November 26, 20071:54:03 AM 發(fā)布:sunlight 伺服電動(dòng)機(jī)又叫執(zhí)行電動(dòng)機(jī),或叫控制電動(dòng)機(jī)。在自動(dòng)控制系統(tǒng)中,伺服電動(dòng)機(jī)是一個(gè)執(zhí)行元件
2021-06-28 09:20:05
不需要使用伺服電機(jī)。一般說(shuō)驅(qū)動(dòng)器控制的好不好,每個(gè)廠家的都說(shuō)自己做的最好,但是現(xiàn)在有個(gè)比較直觀的比較方式,叫響應(yīng)帶寬。當(dāng)轉(zhuǎn)矩控制或者速度控制時(shí),通過(guò)脈沖發(fā)生器給他一個(gè)方波信號(hào),使電機(jī)不斷的正轉(zhuǎn)、反轉(zhuǎn),不斷的調(diào)高
2018-10-26 10:51:18
一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。 1、轉(zhuǎn)矩控制:轉(zhuǎn)矩控制方式是通過(guò)外部模擬量的輸入或直接的地址的賦值來(lái)設(shè)定電機(jī)軸對(duì)外的輸出轉(zhuǎn)矩的大小,具體表現(xiàn)為例如10V對(duì)應(yīng)
2021-06-28 09:27:26
轉(zhuǎn)速不一致的現(xiàn)象發(fā)生。三、伺服編碼器調(diào)零方式伺服編碼器進(jìn)行調(diào)零操作要注意正確的方法,如果不太懂的話,建議聯(lián)系商家或請(qǐng)專業(yè)人士進(jìn)行操作,具體的調(diào)零方式如下:1、用一個(gè)直流電源給電機(jī)的UV繞組通以小于
2023-03-09 18:19:55
硬件:Copley 驅(qū)動(dòng)器ACJ-055-18+Maxon DCX-35L電機(jī)1、原點(diǎn)回零方式簡(jiǎn)介:有幾種原點(diǎn)回零方法,每種方法建立:原點(diǎn)參考(限位或原點(diǎn)開(kāi)關(guān)轉(zhuǎn)換或編碼器索引脈沖)運(yùn)動(dòng)方向以及索引
2021-09-03 07:55:24
原點(diǎn)回零方式是什么?原點(diǎn)回零的配置過(guò)程是怎樣的?
2021-09-30 09:01:49
回零控制原理是什么?回零的方式有哪些?有什么注意事項(xiàng)?
2021-10-29 07:44:02
什么是矢量控制?電機(jī)伺服的控制方式有哪幾種?
2021-10-08 08:15:23
用的是直流電機(jī),回零方式設(shè)的是硬限位回零方式,為什么上位機(jī)接收不到回零完成信號(hào),有知道怎么解決的嗎,急求。
2018-04-25 13:42:29
回零。回零的方式有主動(dòng)會(huì)理、被動(dòng)回零、直接設(shè)置參考點(diǎn)和相對(duì)設(shè)置參考電,可在回零軸的參數(shù)界面里設(shè)置回零方式。
1)主動(dòng)回零
主動(dòng)回零是指按照制定運(yùn)動(dòng)軌跡回零,即:
(1)帶撞塊和編碼器零脈沖:軸一直當(dāng)運(yùn)動(dòng)
2023-12-13 09:35:57
硬件:Copley 驅(qū)動(dòng)器ACJ-055-18+Maxon DCX-35L電機(jī)1、原點(diǎn)回零方式簡(jiǎn)介:有幾種原點(diǎn)回零方法,每種方法建立:原點(diǎn)參考(限位或原點(diǎn)開(kāi)關(guān)轉(zhuǎn)換或編碼器索引脈沖)運(yùn)動(dòng)方向以及索引
2021-09-03 07:03:06
PLC控制伺服電機(jī)找原點(diǎn)的方法是什么?
2021-09-29 07:16:34
西門(mén)子V90伺服用FB284塊的EPOS模式,回零完成后,一跑絕對(duì)定位就會(huì)丟失原點(diǎn)(Axisref變成False),沒(méi)有報(bào)警代碼。跑點(diǎn)動(dòng)則不會(huì)丟失原點(diǎn)。請(qǐng)問(wèn)這種情況應(yīng)該怎么解決?
2023-06-12 16:49:37
三菱伺服電機(jī)的控制方式有哪些?
2021-09-29 08:03:44
1三菱FX系列控制步進(jìn)電機(jī)回原點(diǎn)2、DZRN回原點(diǎn)默認(rèn)是負(fù)方向回原點(diǎn)不能控制回原點(diǎn)方向,若要從正方向回原點(diǎn),需要用DSZR是帶DOG搜索的原點(diǎn)回 歸指令;例如 DSZR X00 X01 Y00
2021-07-08 08:01:17
關(guān)于安川伺服電機(jī)采用位脈沖+符號(hào)控制方式的接線與設(shè)置不看肯定后悔
2021-09-28 07:59:51
時(shí),系統(tǒng)會(huì)根據(jù)光電開(kāi)關(guān)的下降沿進(jìn)行回零,那么我回零以后電機(jī)停止在原點(diǎn),可是另外兩個(gè)絕對(duì)值編碼器應(yīng)該有讀數(shù)吧,它們的值不一定是0吧? 這個(gè)時(shí)候它們應(yīng)該有讀數(shù)A1和B1;
2.當(dāng)我在上位機(jī)發(fā)出運(yùn)動(dòng)***位置
2023-12-11 07:33:28
硬件:Copley 驅(qū)動(dòng)器ACJ-055-18+Maxon DCX-35L電機(jī)1、原點(diǎn)回零方式簡(jiǎn)介:有幾種原點(diǎn)回零方法,每種方法建立:原點(diǎn)參考(限位或原點(diǎn)開(kāi)關(guān)轉(zhuǎn)換或編碼器索引脈沖)運(yùn)動(dòng)方向以及索引
2021-06-28 10:04:46
基于DS402協(xié)議的伺服電機(jī)原點(diǎn)回零模式怎么實(shí)現(xiàn)?
2021-09-30 06:29:57
如何使用Arduino開(kāi)發(fā)板通過(guò)藍(lán)牙方式控制伺服電機(jī)?
2021-09-30 08:55:56
如何利用ThreadX內(nèi)核的MDK AC6方式移植和設(shè)計(jì)框架?
2021-11-29 07:12:44
伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2021-01-21 07:38:46
進(jìn)行調(diào)試。下面是調(diào)試伺服電機(jī)的具體步驟: 1、初始化參數(shù)在接線之前,先初始化參數(shù)。在控制卡上:選好控制方式;將PID參數(shù)清零;讓控制卡上電時(shí)默認(rèn)使能信號(hào)關(guān)閉;將此狀態(tài)保存,確保控制卡再次上電時(shí)即為
2015-12-29 11:12:23
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2021-01-22 07:46:05
關(guān)于伺服回原.我使用三菱PLC控制一個(gè)臺(tái)達(dá)伺服系統(tǒng)與一個(gè)步進(jìn)系統(tǒng), 通過(guò)臺(tái)達(dá)HMI界面做一些操作.為了方便使用, 想在出現(xiàn)異常時(shí), 可以快速排除后一鍵回原點(diǎn), 而不需要手動(dòng)移動(dòng)電機(jī)到原點(diǎn)的一側(cè).這個(gè)
2021-06-28 12:17:10
伺服電機(jī)一般都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式 。 速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的。位置控制是通過(guò)發(fā)脈沖來(lái)控制的。具體采用什么控制方式要根據(jù)客戶的要求,滿足何種運(yùn)動(dòng)
2018-10-26 10:57:29
無(wú)刷電機(jī)主要由哪幾部分組成?無(wú)刷電機(jī)是怎樣進(jìn)行工作的?無(wú)刷伺服電機(jī)的控制方式有哪幾種?
2021-08-09 09:02:06
步進(jìn)伺服電機(jī)回原點(diǎn)的常用方法是什么?
2021-09-29 07:18:40
://wenku.baidu.com/view/7987d89a51e79b89680226f1.html2、步進(jìn)電機(jī)如何回原點(diǎn)?----http://www.ymmfa.com/read-gktid-1556143.html3、步進(jìn)電機(jī)怎么找原點(diǎn) 有沒(méi)有圖或程序呢----
2021-07-08 09:35:40
步進(jìn)電機(jī)和伺服電機(jī)是怎樣接線的?步進(jìn)電機(jī)和伺服電機(jī)有哪幾種接線方式?
2021-09-26 08:00:08
但是實(shí)找零的方法有很多種,步進(jìn)伺服電機(jī)自身可以完成,上位機(jī)配合也可以完成,下面就來(lái)介紹下回原點(diǎn)的常見(jiàn)方法有以下幾種。一、步進(jìn)伺服電機(jī)在工作的時(shí)候,處于一直轉(zhuǎn)動(dòng)的狀態(tài),但當(dāng)它碰到原點(diǎn)開(kāi)關(guān)的時(shí)候,伺服
2021-06-28 08:52:50
的最大值,所以系統(tǒng)認(rèn)為原點(diǎn)丟失,并要求每次開(kāi)機(jī)都要運(yùn)行找零程序。四、 伺服電機(jī)潤(rùn)滑系統(tǒng)故障:伺服電機(jī)是一個(gè)精密部件,設(shè)備有專用伺服潤(rùn)滑系統(tǒng),如果油杯油位不夠會(huì)有報(bào)錯(cuò),此時(shí)注意添加專用潤(rùn)滑油,切記不可
2016-01-08 14:45:25
請(qǐng)問(wèn)一下怎樣選擇伺服電機(jī)的控制方式?
2021-10-12 08:42:53
請(qǐng)問(wèn)一體化伺服電機(jī)編碼器值清零或設(shè)置原點(diǎn)如何操作?
2021-09-26 07:11:13
請(qǐng)問(wèn)如何實(shí)現(xiàn)一鍵伺服回原點(diǎn)?
2021-10-13 06:30:34
復(fù)雜環(huán)境下基于角點(diǎn)回歸的全卷積神經(jīng)網(wǎng)絡(luò)的車(chē)牌定位_羅斌
2017-01-08 10:11:41 0
0 伺服電機(jī)一般都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式 。速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的。位置控制是通過(guò)發(fā)脈沖來(lái)控制的。具體采用什么控制方式要根據(jù)客戶的要求,滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2017-02-10 05:31:112238 由PLC與伺服電機(jī)組成一個(gè)系統(tǒng),通過(guò)PLC控制伺服電機(jī),實(shí)現(xiàn)機(jī)構(gòu)的原點(diǎn)回歸、相對(duì)定位和絕對(duì)定位功能
2017-11-13 06:01:0032048 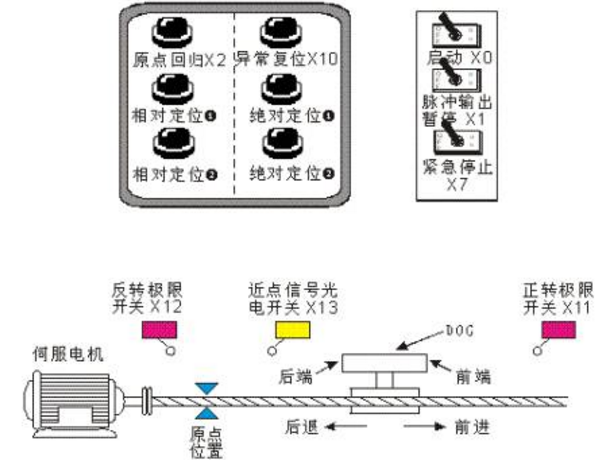
一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式 。
2018-07-05 09:30:002570 一般來(lái)說(shuō),伺服電機(jī)的編碼器有兩種,絕對(duì)值編碼器和相對(duì)值編碼器。絕對(duì)值編碼器斷電可以保持,只要電池還有電,是不需要尋原點(diǎn)的;相對(duì)編碼器由于斷電后會(huì)丟失電機(jī)多圈數(shù)值,故需要尋原點(diǎn)操作。
2018-02-05 09:09:3423452 本文開(kāi)始介紹了伺服電機(jī)的工作原理與優(yōu)點(diǎn),其次介紹了伺服電機(jī)的選型步驟與最簡(jiǎn)單伺服電機(jī)選型計(jì)算方式,最后介紹了伺服電機(jī)選型的注意事項(xiàng)。
2018-04-25 14:36:4741422 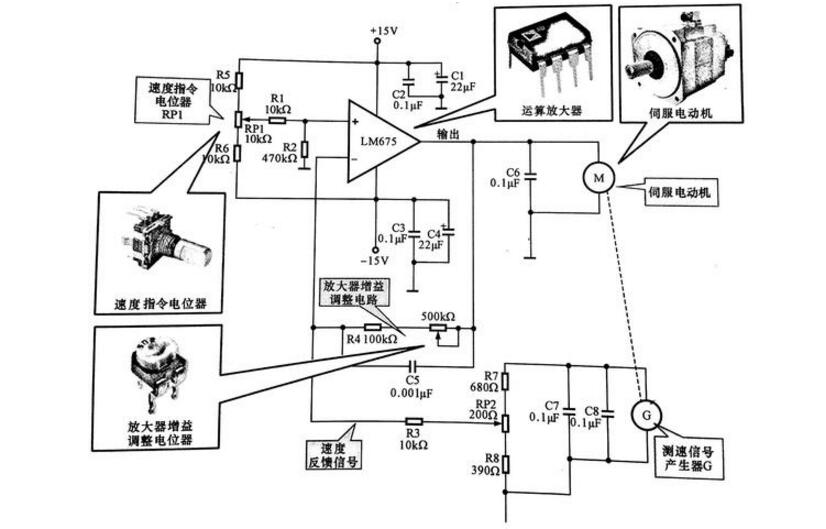
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2018-04-30 17:00:007381 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要
2018-07-24 11:19:483808 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2018-11-13 17:01:444505 日系伺服電機(jī)的控制方式怎么選擇 位置控制方式、轉(zhuǎn)矩控制方式、速度控制方式,日系伺服電機(jī)的這三種控制方式一般我們都清楚。像速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的,位置控制是通過(guò)發(fā)脈沖來(lái)控制
2020-06-28 17:12:04654 日系伺服電機(jī)的控制方式怎么選擇 位置控制方式、轉(zhuǎn)矩控制方式、速度控制方式,日系伺服電機(jī)的這三種控制方式一般我們都清楚。像速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的,位置控制是通過(guò)發(fā)脈沖來(lái)控制
2020-06-12 15:05:13505 伺服電機(jī)一般都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式 。
2018-12-27 10:11:267868 伺服馬達(dá)選型和使用一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制的。位置控制是通過(guò)發(fā)脈沖來(lái)控制的。富士伺服馬達(dá)如果上位控制器有比
2020-06-12 11:46:133508 所謂定位,就是要讓伺服電機(jī)走到一個(gè)確定的位置。這個(gè)位置可以是增量式的,也可以是絕對(duì)式的。打個(gè)比方,我們現(xiàn)在在路上,我們要往前走10米,相當(dāng)于我們的位置要往前增加十米,這個(gè)十米就是一個(gè)位置增量。
2019-10-21 11:19:392206 本文主要闡述了直流伺服電機(jī)機(jī)械特性及它的控制方式。
2020-01-09 14:13:1415276 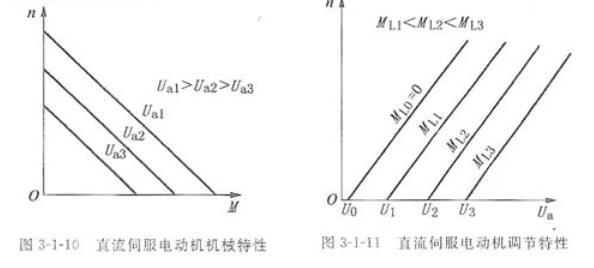
的轉(zhuǎn)速隨控制電壓的大小而變化,當(dāng)控制電壓的相位相反時(shí),伺服電動(dòng)機(jī)將反轉(zhuǎn)。因此,交流伺服電機(jī)使用的過(guò)程中,做好控制工作很重要。那么交流伺服電機(jī)有哪三種控制方式呢?
2020-01-09 14:42:0725462 一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。大多數(shù)人想知道的就是這三種控制方式具體根據(jù)什么來(lái)選擇的?
2020-12-14 23:12:304529 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?
2021-01-20 10:34:5220 一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。大多數(shù)人想知道的就是這三種控制方式具體根據(jù)什么來(lái)選擇的?
2021-01-22 06:30:447 伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2021-02-03 06:46:1237 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2021-04-04 06:08:5826 什么是伺服電機(jī)?伺服電機(jī)是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),分為直流伺服電機(jī)和交流伺服電動(dòng)機(jī)兩大類(lèi)。
2022-01-14 17:30:2816208 伺服電機(jī)有兩種編碼器:增量式編碼器和絕對(duì)值式編碼器,絕對(duì)值式編碼器還有單圈絕對(duì)值和多圈絕對(duì)值之分。
2022-10-12 15:19:5918730 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2023-03-07 10:19:53601 伺服電機(jī)通常由以下幾個(gè)主要部分組成:
電機(jī)部分:伺服電機(jī)的電機(jī)部分一般由轉(zhuǎn)子、定子、繞組、磁極等部件組成。電機(jī)的類(lèi)型包括直流伺服電機(jī)、交流伺服電機(jī)、步進(jìn)伺服電機(jī)等,每種類(lèi)型的電機(jī)在結(jié)構(gòu)和控制方式上都有所不同。
2023-03-07 15:14:586213 直流伺服電機(jī)的控制方式有多種,下面介紹幾種常見(jiàn)的方式:
位置控制:這種控制方式主要是根據(jù)電機(jī)的角度或位置進(jìn)行反饋控制,通過(guò)控制電機(jī)的轉(zhuǎn)速和方向來(lái)實(shí)現(xiàn)位置控制,應(yīng)用于需要精確位置控制的場(chǎng)合
2023-03-10 13:49:544580 在PLC控制定位系統(tǒng)中,通常會(huì)用到相對(duì)定位、絕對(duì)定位、表格定位、原點(diǎn)回歸等功能,針對(duì)FX5U PLC可以使用正轉(zhuǎn)極限、反轉(zhuǎn)極限,利用DOG搜索功能進(jìn)行原點(diǎn)回歸。
2023-03-10 14:17:044340 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2023-03-17 09:47:13448 伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場(chǎng)景下,我們?cè)撊绾芜x擇伺服電機(jī)的控制方式呢?一、伺服電機(jī)脈沖控制方式在一些小型單機(jī)設(shè)備,選用脈沖控制實(shí)現(xiàn)電機(jī)的定位,應(yīng)該是常見(jiàn)的應(yīng)用方式,這種
2022-03-14 14:33:482401 
零點(diǎn)位置是通過(guò)程序復(fù)位控制回零或者在回零過(guò)程中感應(yīng)到原點(diǎn)限位的時(shí)候,把當(dāng)前位置值清零,表示原點(diǎn)或零點(diǎn),一切位置都是以原點(diǎn)為基礎(chǔ),確定零點(diǎn)位置的時(shí)候,應(yīng)先確定運(yùn)動(dòng)的正向和負(fù)向,以及電機(jī)的實(shí)際運(yùn)動(dòng)方向。
2023-07-24 16:10:356149 伺服電機(jī)控制方式有脈沖、模擬量和通訊控制這三種,在不同的應(yīng)用場(chǎng)景下,該如何確定選擇伺服電機(jī)控制方式?
2023-07-26 09:22:20980 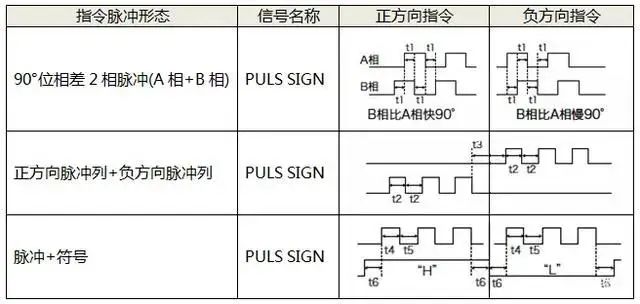
伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來(lái)控制,位置控制是通過(guò)發(fā)脈沖來(lái)控制。具體采用什么控制方式要根據(jù)客戶的要求以及滿足何種運(yùn)動(dòng)功能來(lái)選擇。
2023-07-28 14:36:19574 
(1)過(guò)載運(yùn)行:將伺服電機(jī)用于超出其額定負(fù)載能力的應(yīng)用,導(dǎo)致電機(jī)過(guò)熱、損壞或提供不穩(wěn)定的輸出。伺服電機(jī)應(yīng)根據(jù)制造商提供的額定負(fù)載參數(shù)選擇合適的型號(hào),并確保在正常工作范圍內(nèi)運(yùn)行。 (2)不正確的電源
2023-08-01 08:10:02250 什么是伺服電機(jī)的原點(diǎn)設(shè)置?伺服電機(jī)零點(diǎn)和原點(diǎn)的區(qū)別 伺服電機(jī)的原點(diǎn)設(shè)置,簡(jiǎn)單來(lái)說(shuō),就是確定電機(jī)的起始位置或參考位置。在使用伺服電機(jī)控制系統(tǒng)時(shí),需要將電機(jī)的位置與設(shè)定的參考位置進(jìn)行對(duì)齊,以確保精準(zhǔn)
2023-12-25 13:57:591135 伺服電機(jī)的三種控制方式 如何確定選擇伺服電機(jī)控制方式? 伺服電機(jī)是一種能夠根據(jù)輸入信號(hào)實(shí)時(shí)調(diào)整轉(zhuǎn)速和位置的電動(dòng)機(jī)。它通常用于需要高精度、高效率、高可靠性的工業(yè)領(lǐng)域,如機(jī)床、機(jī)器人、印刷設(shè)備等。伺服
2023-12-26 14:02:19582 在伺服電機(jī)系統(tǒng)中,通常會(huì)有兩個(gè)重要的參考位置,即伺服電機(jī)零點(diǎn)和原點(diǎn)。伺服電機(jī)零點(diǎn)是指電機(jī)的初始位置,也可以理解為初始零位或歸零位置。
2024-01-05 10:27:02585 伺服脈沖控制方式通過(guò)高速脈沖信號(hào)對(duì)伺服電機(jī)進(jìn)行精確控制,能夠?qū)崿F(xiàn)高精度的定位和速度調(diào)節(jié),提高生產(chǎn)效率和產(chǎn)品質(zhì)量。
2024-01-22 09:34:53165 特性,可把所收到的電信號(hào)轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出。按控制方式可分為:脈沖型和總線型。 一、伺服電機(jī)脈沖方式 伺服電機(jī)脈沖方式是通過(guò)控制器向驅(qū)動(dòng)器發(fā)送脈沖信號(hào)控制電機(jī)運(yùn)動(dòng),由于每一次脈沖的頻率和寬度
2024-02-25 11:53:15534
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論