 電子發(fā)燒友App
電子發(fā)燒友App


1. 引言
Cypress在2013年推出了可編程片上系統(tǒng)PSoC(Programmable System on Chip)家族的最新產(chǎn)品PSoC4,采用ARM Cortex-M0作為處理核心。PSoC4完全繼承了PSoC芯片家族本身的高度可編程的靈活性,并融合了Cortex-M0高性價比的處理器核架構(gòu),使得PSoC4系列產(chǎn)品成為一個具有高度可擴展性的處理器平臺,在性價比、功耗等方面優(yōu)勢顯著。更值得一提的是,PSoC4針對電機控制提供了完整和極具特色的片內(nèi)資源,因此工程師在PSoC4上開發(fā)電機控制系統(tǒng)時將更加直觀與快捷。
PSoC4產(chǎn)品系列目前推出的是CY8C4100和CY8C4200兩個入門級產(chǎn)品系列。本文即以CY8C4200為例,介紹如何在PSoC4上開發(fā)有傳感器的三相無刷直流電機控制系統(tǒng)。
2. PSoC4架構(gòu)及與電機控制相關(guān)的片內(nèi)資源簡介
PSoC 4是基于ARM Cortex-M0 CPU(處理器)的可編程嵌入式系統(tǒng)控制器家族,為嵌入式應(yīng)用提供了強大的可編程平臺。它集合了可編程模擬資源、可編程內(nèi)部互聯(lián)、用戶可編程數(shù)字邏輯、通用的固定功能外設(shè)計以及高性能的ARM Cortex-M0 CPU子系統(tǒng)。
圖1是PSoC4的系統(tǒng)框圖。限于篇幅,本文將主要概括與無刷直流電機控制相關(guān)的片內(nèi)資源特性,詳細內(nèi)容可以參考Cypress網(wǎng)站上的PSoC4的數(shù)據(jù)手冊。
●高達48MHz,43 DMIPS 的32位Cortex-M0 CPU,支持單周期乘法
●多達32 KB Flash及4KB SRAM內(nèi)存
●四個獨立的可支持中央對齊的TCPWM,支持互補的可編程死區(qū)及同步ADC操作
●兩個支持比較器模式及SAR ADC輸入緩沖功能的運算放大器
●兩個電流數(shù)模轉(zhuǎn)換器(IDAC),可以輸出給內(nèi)部模塊,或通過GPIO輸出到外部成為可定制的用戶電流源。
●四個可編程數(shù)字邏輯模塊(UDB)
●一個支持零開銷通道切換功能的12位1 Msps ADC
●CapSense驅(qū)動
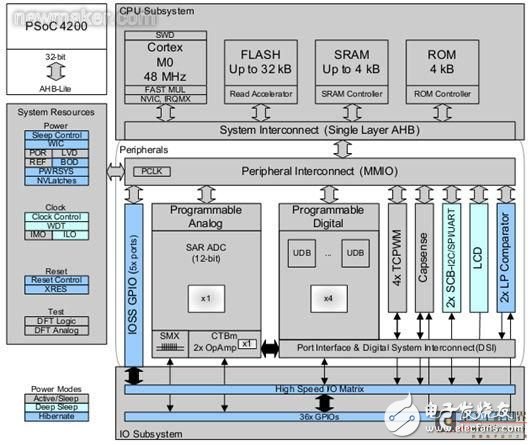
圖1: PSoC4芯片系統(tǒng)框圖
PSoC4在開發(fā)環(huán)境方面與PSoC家族的上一代產(chǎn)品保持一致,仍然為PSoC Creator,延續(xù)了將片內(nèi)資源抽象為模塊化Component的開發(fā)方法,控制系統(tǒng)架構(gòu)清晰具體,簡單快捷。用戶可以更多關(guān)注產(chǎn)品的功能開發(fā),而較少的注意芯片的硬件結(jié)構(gòu)細節(jié)。
3. 有傳感器無刷直流電機控制原理及主要商用控制方案分析
① 無刷直流電機控制原理
無刷直流(Brushless Direct Current, BLDC)電機正在汽車、家電、工業(yè)自動化、航空航天及醫(yī)療設(shè)備領(lǐng)域獲得廣泛的應(yīng)用,并將繼續(xù)逐步取代有刷電機。由于采用電子換相,BLDC電機具有更長的壽命和更小的運轉(zhuǎn)噪音。此外,隨著軟磁材料技術(shù)的進一步提高和價格的不斷下降,BLDC電機將更多的采用高性能的釹鐵硼稀土材料制作永磁轉(zhuǎn)子,其較高的磁能積和穩(wěn)定的特性使BLDC電機擁有更好的機械特性和動態(tài)響應(yīng),更高的效率和轉(zhuǎn)速范圍。因此,在環(huán)境和性能要求比較苛刻的中高端應(yīng)用中,BLDC電機將獲得進一步的推廣。
從電機結(jié)構(gòu)原理上來說,BLDC電機定子和轉(zhuǎn)子磁場具有相同的頻率和轉(zhuǎn)速,因此是同步電機的一種。定子繞組可繞制成單相、兩相和三相,其中三相BLDC電機因輸出功率大、轉(zhuǎn)矩脈動小和效率高應(yīng)用最廣泛。本文的研究對象也將放在三相BLDC電機的控制系統(tǒng)上。
三相BLDC電機采用兩相順序通電模式產(chǎn)生旋轉(zhuǎn)磁場,定子各相繞組的導(dǎo)通與否由轉(zhuǎn)子位置唯一確定,以保證轉(zhuǎn)子能夠始終輸出最大轉(zhuǎn)矩。由于取消了自動換向的機械電刷,因此需要實時檢測轉(zhuǎn)子的空間位置,霍爾效應(yīng)傳感器因其較高的性價比和安裝方便被廣泛采用。對于兩相導(dǎo)通的三相BLDC電機來說,每個電周期分成6個不同的通電區(qū)間,因此需要三個霍爾傳感器來進行分區(qū)。圖2為典型的霍爾傳感器輸出信號與相應(yīng)的導(dǎo)通相之間的關(guān)系圖,霍爾傳感器的每一個變化都要求導(dǎo)通相的實時改變,電機即按照既定的邏輯連續(xù)順序運行。

圖2:霍爾傳感器信號與相繞組導(dǎo)通關(guān)系圖
② 無刷直流電機主要商用控制方案分析
目前各大主流半導(dǎo)體廠商均推出了各自的有傳感器BLDC電機控制方案,技術(shù)類似,也比較成熟。概括說來,將三路霍爾傳感器的輸出接到MCU的輸入引腳上,每一路電平的變化將會觸發(fā)中斷,在中斷服務(wù)程序中根據(jù)圖2的邏輯來查表改變相應(yīng)的導(dǎo)通相,達到換向的目的。
圖3為市場上的主流商用方案示意圖,通過簡單的分析我們可以發(fā)現(xiàn)MCU通過中斷服務(wù)程序來進行換相,在對電機電流的監(jiān)控上,電流信號由外部采樣及運放電路送入ADC后由軟件程序來比較判斷是否過流并關(guān)斷PWM輸出,保護電機及電路系統(tǒng)。
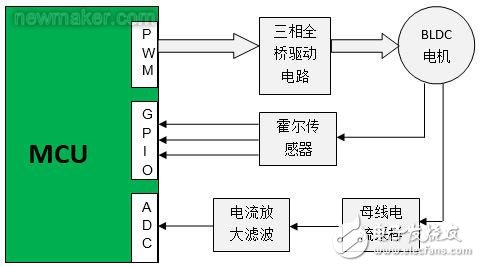
圖3:BLDC電機主流商用方案示意圖
總的說來,與永磁同步電機和步進電機相比,BLDC電機的控制較為簡單。各半導(dǎo)體廠商的解決方案結(jié)構(gòu)大體類似,技術(shù)也日趨同質(zhì)化。通過進一步的分析可以發(fā)現(xiàn),電機的換相和電流的監(jiān)控都在軟件中完成,但是電流的放大與處理需要外部的運放電路,速度慢,成本較高且不可靠。此外,對霍爾傳感器失效的硬件檢測缺乏實時有效的手段,影響電機的安全運行。
4.基于PSoC4的無刷直流電機控制架構(gòu)及優(yōu)勢分析
PSoC4采用的ARM Cortex-M0高性能處理核心不僅能夠快速完成電機的閉環(huán)速度調(diào)節(jié)和其它相應(yīng)的控制運算,其內(nèi)部集成的可編程UDB可以將圖2所示的換相邏輯以CPLD的形式固化在芯片中,實現(xiàn)更快速可靠的硬件換相,無須軟件干涉;此外,UDB更可以直接檢測霍爾信號的失效狀態(tài),并立即關(guān)斷PWM輸出,迅速保護電機。
PSoC4內(nèi)部集成有支持比較器模式的運算放大器(Opamp)和可編程IDAC電流源,因此對電機電流的監(jiān)控也可以完全集成到PSoC4片內(nèi)完成,而不需要任何外部有源器件。電機電流經(jīng)采樣電阻后進入片內(nèi)Opamp,放大后作為片內(nèi)比較器的正端輸入,比較器的負端輸入為片內(nèi)IDAC電流源產(chǎn)生的過流閾值基準。比較器輸出的跳變將直接關(guān)斷PWM輸出,保護電機。
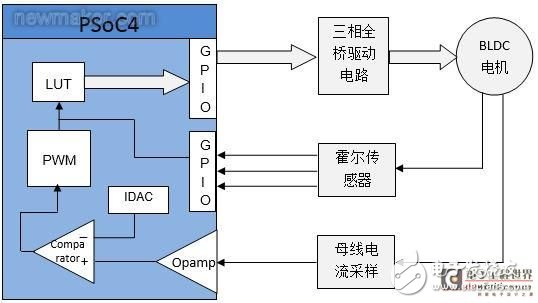
圖4:基于PSoC4的無刷直流電機控制框圖
對比基于PSoC4的控制方案和當前市場上的主流商用方案我們不難發(fā)現(xiàn),PSoC4由于集成了豐富的片內(nèi)模擬和數(shù)字資源,可以完全用片內(nèi)的硬件來完成無刷直流電機的順序換相和電流監(jiān)控,比軟件實現(xiàn)更加快速可靠,且節(jié)省了可觀的片外有源器件的成本。此外,片內(nèi)的UDB還可以直接檢測霍爾傳感器的失效狀態(tài),并迅速保護電機,這也是其它廠商所不具備的重要功能。
5. 基于PSoC4 的無刷直流電機控制系統(tǒng)設(shè)計實例
① 控制原理圖設(shè)計
依據(jù)圖4的控制框圖,我們設(shè)計了圖5所示的在PSoC Creator環(huán)境下的BLDC電機控制原理圖。
霍爾信號經(jīng)I/O引腳后直接輸入UDB換相邏輯表LUT_Cmut直接驅(qū)動三相全橋電路,完成電機的硬件換相。同時霍爾信號也同步輸入另一個UDB邏輯表LUT_Spd,實現(xiàn)霍爾傳感器的失效狀態(tài)檢測并完成電機的速度檢測。
電機電流經(jīng)采樣電路后輸入片內(nèi)運放Opamp_1,經(jīng)運放和濾波后輸入片內(nèi)比較器,與片內(nèi)IDAC產(chǎn)生的過流閾值基準進行比較,反轉(zhuǎn)后將直接關(guān)斷PWM輸出,通過換相邏輯表LUT_Cmut來使電機斷電。
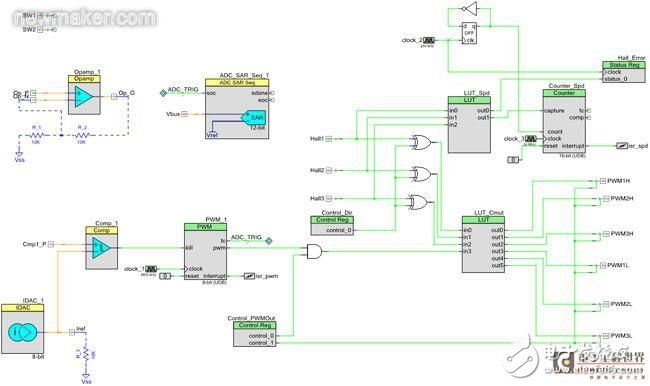
圖5:步進電機控制原理圖
② 控制系統(tǒng)軟件設(shè)計
由于采用了PSoC4片內(nèi)硬件進行換相、霍爾失效檢測和過流檢測保護,因此系統(tǒng)的的軟件設(shè)計較為簡捷,只需讀取用戶命令和完成速度閉環(huán)調(diào)節(jié)等即可。
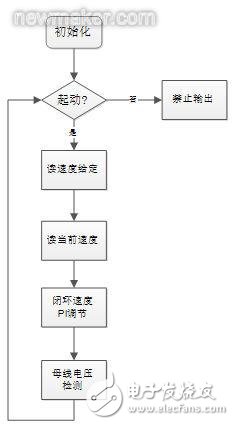
圖6:主程序流程圖
圖6為控制系統(tǒng)主程序流程框圖。
控制主程序首先初始化和配置PSoC4的內(nèi)部資源,在主循環(huán)中首先檢測用戶的起停命令和速度給定,在執(zhí)行速度閉環(huán)PI調(diào)節(jié)。最后檢測母線電壓狀態(tài)。
③ 控制系統(tǒng)實驗結(jié)果
完成系統(tǒng)前述的系統(tǒng)原理圖和程序設(shè)計后,在PSoC Creator環(huán)境下編譯BLDC電機控制工程,并連接PSoC4開發(fā)板,三相全橋驅(qū)動板與BLDC電機,通電后電機可正常運行。圖7顯示電機運行在4000RPM時的霍爾信號與三相繞組反電動勢波形。通道1,2,3分別為相繞組A,B,C反電動勢波形。
由圖可以看出,BLDC電機運行穩(wěn)定,反電動勢為標準的梯形波。

圖7: 三相霍爾信號與繞組反電動勢波形
6. 小結(jié)
本文主要介紹了如何在Cypress推出的PSoC家族的最新成員PSoC4平臺上開發(fā)有傳感器BLDC電機控制系統(tǒng)。本文的設(shè)計過程說明,PSoC4片內(nèi)集成的豐富資源使BLDC電機的換相和霍爾失效檢測都可以由內(nèi)部硬件來完成,簡化了控制系統(tǒng)的軟件設(shè)計并提高了可靠性。此外,片內(nèi)集成的運放和比較器將電流檢測和保護也放在芯片內(nèi)部完成,使過流檢測反應(yīng)速度更快并進一步降低了成本。因此,用戶可以使用PSoC4設(shè)計出具有優(yōu)異性能和較低價格的有傳感器BLDC電機控制系統(tǒng)和產(chǎn)品。








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論