由于光電編碼器不僅能測位置還能通過一定的算法測速度,因此伺服電機通常在轉子軸的非負載端裝有光電編碼器。
2020-08-25 13:45:52 4951
4951 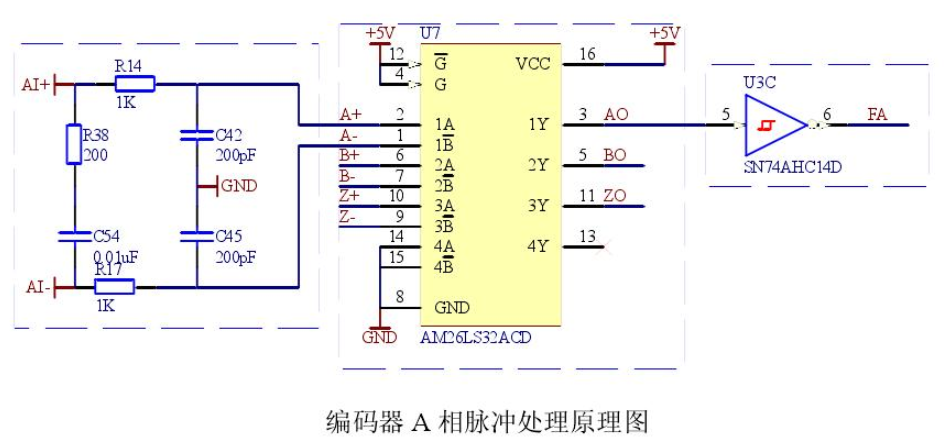
您好,我用F28035做步進電機的位置控制,傳感器使用增量式5線編碼器,有以下幾個問題:1. 傳感器5V供電,方波信號的高電平在4.2V以上,編碼器和28035芯片之間需要調理電路么?直接連到芯片
2020-05-20 15:02:44
`拉線位移編碼器在使用的過程中,編碼器是好是壞,怎樣來判斷呢?首先zui簡單的辦法就是按照產品說明書上的接線定義把線接好,如果沒有脈沖輸出信號,就證明編碼器壞了,下面精量電子小編來具體的論說一下吧
2020-08-19 16:27:53
通過plc采集絕對式編碼器的脈沖信號,其輸出是并口輸出,通過plc輸出的信號是什么形式,通過什么來實現到電腦的傳輸???謝謝
2016-05-08 20:48:19
車輪位置的確定是在制作小車的過程中必不可少的部件,好在STM32中包含了硬件的編碼器。但使用的過程中卻存在諸多不方便。下面由我一一道來:1、編碼器原理什么是正交?如果兩個信號相位相差90度,則這兩個
2021-04-14 09:19:31
車輪位置的確定是在制作小車的過程中必不可少的部件,好在STM32中包含了硬件的編碼器。但使用的過程中卻存在諸多不方便。下面由我一一道來:1、編碼器原理什么是正交?如果兩個信號相位相差90度,則這兩個
2021-05-17 06:00:00
,那么輸出00 0000 0001, 如果偏離50°,也就是在50°的位置, 那么輸出就是00 0101 0000。絕對式編碼器總是輸出當前位置信息。編碼器工作原理 #1 光電編碼器,是一種通過光電轉換將
2012-02-24 22:03:25
產品。混合式絕對編碼器:混合式絕對編碼器,它輸出兩組信息,一組信息用于檢測磁極位置,帶有絕對信息功能;另一組則完全同增量式編碼器的輸出信息。光電編碼器的應用光電編碼器是通過讀取光電編碼盤上的圖案或編碼
2019-10-13 08:00:00
E6B2-CWZ5B型號編碼器,A、B相接到PLCi0.0和i0.1,PLC與編碼器使用外部開關電源,接線后,西門子PLC接不到信號怎么處理?
2022-05-11 20:18:36
編碼器的原理是什么?編碼器可分為哪幾類?編碼器是如何進行接線的?編碼器軟件四倍頻技術是什么?
2021-08-04 06:08:39
編碼器是什么?編碼器工作原理是什么?
2021-10-19 09:59:08
長距離傳輸。其缺點是無法輸出軸轉動的絕對位置信息。2、絕對式編碼器 絕對式編碼器是直接輸出數字的傳感器,在它
2022-01-20 06:47:46
連接,測量生產線的線速度 角速度,通過編碼器測量電機、轉軸等的速度測量 4、位置測量 機床方面,記憶機床各個坐標點的坐標位置,如鉆床等 自動化控制方面,控制在牧歌位置進行指定動作。如電梯、提升機
2017-11-24 19:00:47
編碼器的工作原理是什么?如何通過波形得出正反轉的判據呢?編碼器的程序結構如何實現?
2021-10-14 06:36:49
小弟想用STM32接編碼器,編碼器一直正轉使計數器到達自動載入值后溢出產生的中斷事件和一直反轉使計數器到零后又自動裝入初始值產生的中斷事件,這兩個中斷能從標志位上判斷出來嗎?我就是想找個方法來區分出計數器是上溢還是下溢。
2020-07-14 08:00:11
最近需要用到正交編碼器,將定時器計數器配置為編碼器模式,在判斷編碼器方向時遇到疑問,之前用STM32的時候,是通過TIMx->CR1:DIR位來判斷的:但看了下CH32V307的手冊,這邊和STM32的描述不一樣:所以我現在不確定通過DIR位來判斷的方法在CN32V307上是否適用
2022-06-22 06:52:00
`描述此 TI 設計基于 HEIDENHAIN EnDat 2.2 標準實現適用于位置和旋轉編碼器的硬件接口解決方案。構件塊包括編碼器電源(采用創新的智能 e-Fuse 技術)和可靠的半雙工
2015-04-29 11:55:26
我想問一下,TI的PMSM的例程庫里,增量編碼器永磁同步電機,初始位置是通過什么方式實現的。在例程的那個位置,謝謝
2018-10-30 15:58:42
旋轉編碼器的原理是什么?如何去編寫STM32配置Arduino的程序?STM32 Arduino是如何讀取編碼器和旋轉位置方向的?
2021-11-15 08:01:24
為什么要用編碼器?STM32編碼器的原理是什么?
2021-11-24 07:32:10
labview現在可以采集編碼器的位置信息,但是由于是增量的編碼器,每次程序暫停后再運行,編碼器的位置信息會自動清零,而不是在上一次數據的基礎上增大或者減小請教該如何解決。
2019-10-23 09:54:56
1。編碼器原理 什么是正交?如果兩個信號相位相差90度,則這兩個信號稱為正交。由于兩個信號相差90度,因此可以根據兩個信號哪個先哪個后來判斷方向。 這里用了TI12模式,例如當T1上升沿,T2在
2019-07-20 04:00:00
脈沖編碼器簡介脈沖編碼器是利用光學、磁性或機械接點的方式感測位置,并將位置信息轉換為電子信號后輸出的傳感器。其輸出的電子信號一般被用作控制位置時的回授信號。脈沖編碼器按照工作原理可分為增量式和絕對式
2021-03-29 06:12:47
第一次關于伺服電機的筆記1.伺服電機主要的作用是用于高精度定位, 基本上普遍都是用pLC發出脈沖通過私服驅動器來達到定位效果,而私服電機后面的編碼器可以反饋伺服電機的行程 與 PLC發出的脈沖做比
2018-10-25 10:07:08
編碼器可以分為哪幾類?怎樣去讀取編碼器的位置值?伺服電機與編碼器是怎樣工作的?
2021-09-26 08:43:27
可以直接通過編碼器讀取原點的位置嗎
2023-10-13 06:33:06
。增量型編碼器可提供關于增量位置或角度變化的信息。上電后它們不提供絕對位置,但仍然有可能在一次機械旋轉之后通過索引信號獲得。絕對型編碼器則可始終提供絕對機械位置。 增量型編碼器可顯示三種差分信號:A
2018-09-05 16:07:42
增量式編碼器怎么判斷位置已經轉動了一圈
2023-10-09 07:23:03
通過直流調速器(590)里的參數可以知道編碼器的方向,如果反了,將A、B相信號反一下就行了,這是平時我在現場看到別人調試時這么做的,請問如果沒有直流調速器,要怎么判斷編碼器的方向呢?
2023-12-21 07:17:04
如何通過編碼器得知電機轉速?
2021-11-23 07:33:36
單位)的距離。在該等系統中,位置編碼器負責讀取電機軸的角度,并通過數字位置編碼器協議將信息提供給位置編碼器主控裝置。應用處理器的磁場定向控制(FOC)算法負責對角度進行進一步處理,包括電機相電流測量,以計算脈沖寬度調制(PWM)外設的新值。…
2022-11-15 07:45:38
車輪位置的確定是在制作小車的過程中必不可少的部件,好在STM32中包含了硬件的編碼器。但使用的過程中卻存在諸多不方便。下面由我一一道來:1、編碼器原理什么是正交?如果兩個信號相位相差90度,則這兩個
2018-07-04 09:37:31
如何對ISPHUB的讀取功能進行測試呢?怎樣通過串口ISPHUB去讀取BH60絕對位置編碼器呢?
2021-12-21 06:22:51
旋轉編碼器是一種經過驗證的流行解決方案,用于測量旋轉軸的速度,運動方向或位置。有幾種不同的類型,主要的兩種是絕對編碼器和增量編碼器。是如何工作的?有什么不同?如何為應用選擇合適的類型?
2021-01-01 07:46:31
帶編碼器的步進電機,電機在工作的情況下有時會出現電機自身的步數和編碼器測得的步數不一致的情況!以編碼器測得的步數和電機自身的步數對比,調整電機步數,有時會出現調整后的電機位置與預設位置不符現象,(步進電機步數準確,編碼器不準確?)問下有什么辦法解決沒?
2018-05-09 22:37:31
帶有RS485接口,采用USS通信協議和PLC通信。松下A5伺服驅動器可以采用RS485或RS232通訊。通過這種方式可以得到絕對值編碼器實時位置,但是由于通訊速度較慢,所以不能用于高速定位場合
2023-11-14 08:16:32
柵條組成。位置信息通過計算自某點開始的增量數(測量步距數)獲得。由于必須用絕對參考點確定位置值,因此圓光柵碼盤還有一個參考點軌。 2、絕對式 絕對式編碼器就是對應一圈,每個基準的角度發出一個唯一與該
2016-06-27 16:43:31
CUI 關于 PPR 的博客文章,了解有關此主題的更多信息。通過仔細觀察圖 2,您會發現其中只有四個不同的重復輸出狀態。因此,增量編碼器必須以已知的固定位置為參考,才能提供有意義的位置信息。這個
2018-12-20 16:31:09
,在編碼器的每一個位置,通過讀取每道刻線的通、暗,獲得一組從2的零次方到2的n-1次方的唯一的2進制編碼(格雷碼),這就稱為n位絕對編碼器,這樣的編碼器是由光電碼盤進行記憶的。絕對編碼器在一個特定的旋轉
2023-04-20 16:19:54
這個編碼器的輸出是相對位置還是絕對位置呢
2023-10-15 11:36:36
絕對式編碼器輸出的位置怎么判斷是否在原點
2023-10-13 07:32:01
請教三菱PLC如何利用一個編碼器完成測速與長度呢?使用三菱PLC的SPD指令(測速),在此被指定的輸入不能與告訴計數器重復使用。
2023-03-30 15:28:15
請問一下編碼器如何判斷正反轉?
2021-10-15 09:01:24
怎樣去判斷編碼器的正反轉?編碼器脈沖的過程是如何進行的?
2021-06-29 07:59:20
編碼器,編碼器是什么意思
編碼器
編碼器(encoder)是將信號
2010-03-08 15:04:262868 光電編碼器,光電編碼器是什么意思
光電編碼器光電編碼器,是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或
2010-03-08 15:20:401431 1: S7-200 PLC可以連接絕對型編碼器嗎? 解答:S7-200 PLC可以連接絕對型編碼器,但應注意以下幾點: (1)S7-200 PLC可連接并行輸出的絕對型編碼器。串行輸出、總線型輸出、變送一體型
2011-07-01 15:21:43 123
123 針對位置檢測的需要,提出了一種光電編碼器 位置檢測 系統。首先闡述了 光電編碼器 的工作原理,并對基于MSP430單片機位置檢測系統的硬件和軟件系統進行了詳細的論述。結論證明,
2011-08-02 17:02:0981 有關編碼器(ENCODER)的電路信號輸出種類,主要是針對要連接編碼器信號的計數器,PLC,人機介面,工業電腦等式邏輯廠商,他們能接受或要求SENSOR輸出信號,加以設計,亦每種控制器制造廠商會依
2011-08-25 15:44:08467 該TI設計基于雙標準實現適用于位置或旋轉編碼器的硬件接口解決方案。它既支持bis點對點配置又支持bis總線配置。構件塊包括5 v的bis編碼器電源(采用創新的智能e-Fuse技術)和可靠的全雙工
2017-05-08 17:13:0311 接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對式兩類。增量式編碼器是將位移轉換成周期性的電信號,再把這個電信號轉變成計數脈沖,用脈沖的個數表示位移的大小。絕對式編碼器的每一個位置對應一個確定的數字碼,因
2017-05-24 11:41:0722 電機位置編碼器廣泛用于伺服驅動器、機器人、機床、印刷機、紡織機和電梯等工業電機控制應用。用接口把這些編碼器連接到您系統的其它部分會帶來一些棘手的電磁兼容(EMC)問題。為幫您應對這些挑戰,筆者將以
2017-11-17 01:53:522544 絕對編碼器光碼盤上有許多道光通道刻線,每道刻線依次以2線、4線、8線、16線編排,在編碼器的每一個位置,通過讀取每道刻線的通、暗,獲得一組從2的零次方到2的n-1次方的唯一的2進制編碼(格雷碼),這就稱為n位絕對編碼器。這樣的編碼器是由光電碼盤的機械位置決定的,它不受停電、干擾的影響。
2018-12-06 17:12:2152957 本文主要介紹了旋轉編碼器參數以及與plc的連接方法。在我們選擇旋轉編碼器的時候會有一些專業術語的參數,這些專業術語是什么含義呢?我們來了解一下后更清楚的定位我們需要的旋轉編碼器參數才會更準確。
2019-08-06 11:24:175203 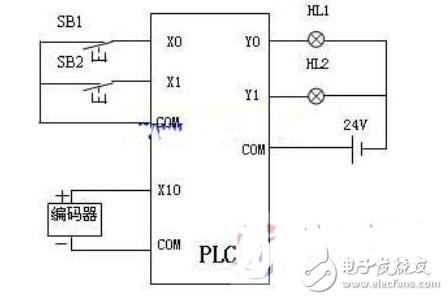
除此之外,有些正交編碼器還包含被稱為零信號或者參考信號的第三個輸出通道。這個通道每旋轉一圈輸出一個單脈沖。你可以使用這個單脈沖來精確計算某個參考位置。在絕大多數編碼器中,這個信號稱為Z軸或者索引。
2019-12-19 09:09:5811850 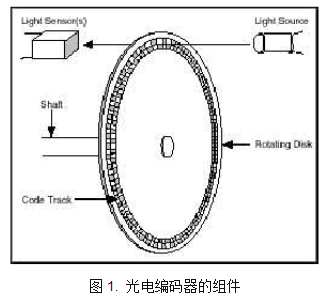
旋轉增量式編碼器轉動時輸出脈沖,通過計數設備來知道其位置,當編碼器不動或停電時,依靠計數設備的內部記憶來記住位置。這樣,當停電后,編碼器不能有任何的移動
2020-01-02 09:54:357457 具體接線方式如下:編碼器的褐線接編碼器工作電壓正極,藍線接編碼器工作電壓負極,輸出線依次接入PLC的輸入點,藍線接外接電源負極,外接電源正極接入PLC的輸入com端。
2020-11-12 10:46:5510999 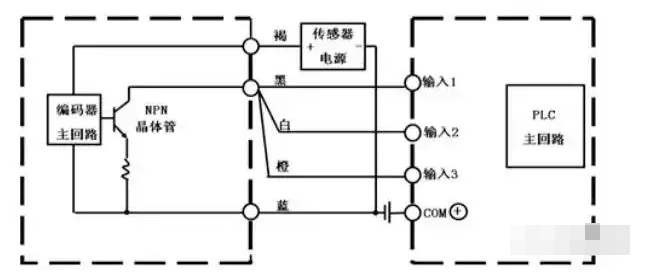
接觸式和非接觸式兩種;按照工作原理編碼器可分為增量式和絕對式兩類。增量式編碼器是將位移轉換成周期性的電信號,再把這個電信號轉變成計數脈沖,用脈沖的個數表示位移的大小。絕對式編碼器的每一個位置對應一個確定的數字碼,因此它的示值只與測量的起始和終止位置有關,而與測量的中間過程無關。
2021-02-19 15:11:024675 編碼器一般用在普通電機的軸端采集旋轉了多少角度,伺服和步進電機都有自帶的信號反饋一般不需要加裝編碼器,通過轉子在編碼器內部掃過了多少個暗刻線來輸出多少個脈沖信號,精度選擇就是編碼器有多少分辨率,越高
2021-02-19 15:33:5110538 
在工業現場中,有些應用需要通過PLC讀取CU250S-2的增量編碼器的脈沖數用于監視電機或負載的位置。本文通過示例介紹S7-300如何通過PROFINET通訊讀取CU250S-2增量編碼器的脈沖數。
2021-03-11 10:14:3318 。位置編碼作為傳感器,能夠精準測量電機軸的角度(以度為單位)或線性軸(以微米為單位)的距離。
? 在該等系統中,位置編碼器負責讀取電機軸的角度,并通過數字位置編碼器協議將信息提供給位置編碼器主控裝置
2021-11-10 09:38:57494 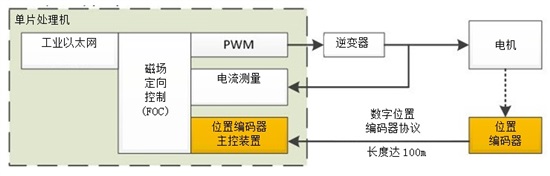
線同一管道傳輸,那么編碼器發生故障時候怎么判斷編碼器的好壞,有哪些方法,今天潤鑫就帶大家來詳細了解一下! 怎么判斷 ① 接PLC查看脈沖個數或碼值是否正確 ② 接示波器查看波形 ③ 用萬用表電壓檔測試輸出是否正常 編碼器為
2022-01-10 11:27:019193 光電編碼器是在一個很薄很輕的圓盤子上,通過緊密儀器來腐蝕雕刻了很多條細小的縫,相當于把一個360度,細分成很多等分,比如成1024組,這樣每組之間的角度差是360/1024度=0.3515625度。
2023-02-13 16:46:301515 嚴格來講,編碼器只會告訴你改如何定位,要如何執行,是需要靠數控系統(或者PLC之類控制器)控制伺服或者步進電機來實現定位的,編碼器好比人的眼睛,知道電機軸或者負載處于當前某個位置,工業上用的一般是光電類型編碼器,下邊簡單說明一下。
2023-04-07 10:16:392032 工業碼垛機器人用編碼器是一種將機械位移轉換為電信號的裝置,常用于測量機器人關節的角度。通過精確地檢測機器人關節的位置,編碼器可以通過反饋控制實現機器人的高精度運動控制。同時,編碼器還可以通過定義
2023-03-31 14:30:33481 
增量型編碼器與絕對值型編碼器怎么選擇?在進行編碼器選擇時,增量型編碼器和絕對值型編碼器是兩種常見的選擇。增量型編碼器是一種基于脈沖計數的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優點
2023-05-08 11:28:331341 
編碼器種類及型號:最常見的編碼器類型是旋轉編碼器和線性編碼器。旋轉編碼器通常用于測量機器人的關節位置,以及測量車輛和船只的轉向角度。線性編碼器通常用于測量運動平臺的位置和速度。旋轉編碼器和線性編碼器可以分為絕對式和增量式編碼器。絕對式編碼器可以直接讀取位置信息,而增量式編碼器則需要計算位置信息。
2023-05-18 11:15:003466 
編碼器是什么?編碼器有哪些分類及應用;編碼器是什么?在數字信號處理和通信系統中,編碼器是一種重要的設備,用于將原始數據轉換為字符序列或二進制碼序列。編碼器是一種可以同時測量物體位置和方向的蒿精度
2023-05-18 11:08:473142 
上,并隨著物體的運動而發生拉伸或縮短。這種拉伸或縮短的運動將被傳遞給編碼器,編碼器通過將運動轉化為電信號來實現對被測物體位置、速度或位移等參數的監測。
2023-05-29 09:23:211995 
增量式編碼器和絕對值編碼器有哪些區別?增量式編碼器通過對變化量進行計數來測量位置變化,而絕對值編碼器可提供實際位置值。因此,增量式編碼器對于測量無限循環的運動比較有用,因為它們可以使用計數器來跟蹤旋轉次數和速度。相比之下,絕對值編碼器適用于任務需要直接獲得位置信息的情景,如機器人運動。
2023-07-05 13:34:282250 
換編碼器后要怎么調零:更換編碼器后,需要將機器重新調零以確保精準度。調零過程可以分為幾個步驟。首先需要檢查新編碼器是否正確接線,確保信號可以正常傳輸。接著可以通過手動操作機械臂或軸來確定當前位置
2023-07-05 14:10:503362 編碼器好壞怎么來判斷:判斷一個編碼器的好壞需要綜合考慮其基本參數、測試數據、可靠性和耐久性等因素。在選擇和使用編碼器時,應了解其基本特性,進行科學合理的測試和比較,并在使用中進行積極的維護和保養,以確保其能夠穩定可靠地工作,為機械系統的正常運行提供有力支持。
2023-07-17 15:06:492781 
增量型編碼器和絕對值編碼器是兩種常見的位置控制裝置,它們在控制位置方面有著不同的工作原理和特點。雖然它們都可以用于位置控制,但是在某些方面存在差異。首先,增量型編碼器是通過檢測位置變化的增量來確定
2023-08-18 14:43:50477 
S7-1200PLC通過高速計數器測量AB相編碼器轉速
2023-09-20 15:30:090 ,同步電機啟動的時候需要知道轉子的磁極位置,這樣才能夠大力矩啟動伺服電機,這樣需要另外配幾路信號來檢測轉子的當前位置,比如增量型的就有UVW等信號,正因為有了這幾路檢測轉子位置的信號,伺服編碼器顯得有點復雜了,以致一般人弄
2023-09-25 14:07:17974 增量式編碼器提供了一種對連續位移量離散化、增量化以及位移變化(速度)的傳感方法。增量式編碼器的特點是每產生一個增量位移就對應于一個輸出脈沖信號。增量式編碼器測量的是相對于某個基準點的相對位置增量,而不能夠直接檢測出絕對位置信息。
2023-10-26 10:44:511968 
MODBUS RTU信號編碼器是一種常用的編碼器,用于測量旋轉位置和角度,并可以通過RS485接口與PLC進行通訊。在使用過程中需要注意以下幾點:
2023-11-08 13:40:45334 嚴格來講,編碼器只會告訴你改如何定位,要如何執行,是需要靠數控系統(或者PLC或運動控制器之類控制器)控制伺服或者步進電機來實現定位的,編碼器好比人的眼睛,知道電機軸或者負載處于當前某個位置,工業
2023-11-13 08:07:17868 
編碼器分為旋轉編碼器和線性編碼器兩種。旋轉編碼器用于檢測旋轉位置和速度,而線性編碼器用于檢測直線位置和速度。
2023-12-22 09:20:04381 
伺服電機編碼器是一種關鍵的反饋裝置,用于測量和控制電機的轉速和位置。在選擇伺服電機編碼器時,常常面臨一個選擇:使用磁電編碼器還是光電編碼器。接下來將從幾個關鍵方面比較這兩種類型的編碼器,以幫助您做出更明智的選擇。
2024-01-18 10:29:02464 一些編碼器會在其旋轉軸上標記一個特殊的標記點,例如一個凹槽或凸起。通過在編碼器旋轉到特定位置時對標記點進行檢測,可以確定零位。
2024-01-18 14:49:40222 ? 編碼器原點有什么功能 編碼器的原點功能主要用于確定位置參考、啟動和停止控制、運動方向判斷以及定位回歸操作。這些功能對于許多應用中的位置測量、運動控制和定位操作至關重要。 編碼器的原點具有以下功能
2024-02-21 15:02:11157 (Autoencoder),它是一種無監督學習的神經網絡模型。自動編碼器由兩部分組成:編碼器和解碼器。編碼器負責將輸入數據轉換為低維表示,解碼器則將低維表示映射回原始輸入空間。這種結構能夠通過編碼器的特征提取和表示能力來壓縮原始數據并保持盡可
2024-01-23 10:58:07416 編碼器零點位置怎么看 要確定編碼器的零點位置,可以通過以下幾種方式進行觀察: 1. 物理標記點:一些編碼器在其旋轉軸上具有專門的物理標記點,例如凹槽或凸起。通過觀察軸上的標記點,可以確定零點位置
2024-02-18 18:28:19737 
差分編碼器信號通常用于測量旋轉運動或線性位置,接收差分編碼器信號的PLC(可編程邏輯控制器)需要進行相應的信號處理才能正確讀取并理解編碼器的輸出。
2024-02-26 14:43:57475 差分編碼器信號通常用于測量旋轉運動或線性位置,接收差分編碼器信號的PLC(可編程邏輯控制器)需要進行相應的信號處理才能正確讀取并理解編碼器的輸出。下面是將差分編碼器信號接入PLC的一般步驟: 1.
2024-03-05 08:42:4983 
 電子發燒友App
電子發燒友App













 工商網監
工商網監
評論